Результат интеллектуальной деятельности: СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к космической технике, в частности к навигации спутниковых систем.
Уровень техники
Принцип построения и конструкция устройств навигации спутниковых систем изложен в патентно-ассоциированной литературе, в частности в монографиях:
Е.П. Молотов «Наземные радиотехнические системы управления космическими аппаратами» [1], Москва, ФИЗМАТЛИТ, 2004. Труды ФГУП «РНИИ КП»;
А.В. Васильев, доклад «Использование метода глубокого комплексирования программного приемника радионавигационных сигналов ГЛОНАСС и микромеханических ИНС с целью повышения точности и надежности навигационных определений перспективных образцов малых КА» [2], IV НПК «МИКРОТЕХНОЛОГИИ В АВИАЦИИ И КОСМОНАВТИКЕ», РАН, Москва, 2006;
В.Д. Дишель, доклад «Методы высокоточной навигации и ориентации, их летная отработка и применение в терминальных инерциально-спутниковых системах управления средствами выведения и спуска с орбит» [3], ИКИ РАН Сборник трудов, Россия, Таруса, н.т.к., 22-25 сентября 2008 г С.157-190;
Liu; Gang Kevin; et al. «Устройство блока навигации, включающее гибридные системы глобального позиционирования (GPS) и инерциальной навигационной системы» [10], United States Patent Application №2008011454, May 15, 2008, Class at Publication 701/480;
Mizuochi; Shunichi; et al. «Способ отслеживания сигнала спутника и приемник сигнала» [11], United States Patent Application №20120038508, August 15, 2011, Class at Publication 342/357.23;
«Устройство радиоприема высокоскоростной информации космической радиолинии» [4], описание полезной модели, патент RU116293, приоритет от 20.12.2011;
«Радиоприемник цифровой информации» [5], изобретение, патент RU 2371845 опубликован в 2008 году;
«Устройство сдвига полосы частот» [6], изобретение, а.с. СССР №824401, опубликовано в 1979 году.
В способах высокоточной навигации систем разного целевого назначения находят применение спутниковые навигационные системы ГЛОНАССС и GPS. Система «ГЛОНАСС» предназначена для массового обслуживания систем различного технического построения и различного целевого назначения, потребители (НАП) используют сигналы «ГЛОНАСС», по которым определяют свои координаты и вырабатывают, в случае необходимости, управляющие воздействия для изменения траектории полета. Центр управления полетом наземного сектора анализирует вырабатываемые управляющие воздействия, подтверждает их выполнение или выполнят траекторные измерения, уточняет управляющие воздействия, выдает команду выполнения на борт КА.
Ориентация космических аппаратов (КА) и других подвижных средств, коррекция траектории их движения требует достижения все возрастающих точностей.
Потребители системы ГЛОНАСС - навигационные космические аппараты (НКА) [1, стр.221] обеспечиваются информацией на несущих в диапазонах 1600 и 1250 МГц. В цифровой информации потребителю передаются данные: альманах и оперативная информация. Структура радионавигационного сигнала содержит псевдослучайную последовательность дальномерного кода скорости 5,11 Мбит/с и цифровую информацию (навигационные сообщения) со скоростью 50 бит/с.
Координаты потребителя с помощью НАП определяются посредством расчета по измеренным дальностям от потребителей до НКА. Из измерений значений переданных данных (ПД) вычитаются ошибки от влияния тропосферы и ионосферы на распространяющийся радиосигнал. Для определения ионосферных ошибок использует когерентные частоты f1 и f2, отношение частот γ=(f1/f2)2 [1, стр.230]. Измерение дальности производится по запаздыванию двоичного периодического сигнала PN-последовательности на трассе, радиальная скорость определяется по доплеровскому смещению частоты несущей, восстанавливаемой после «свертки» PN-модуляции. Погрешности ПД:
- погрешности эфемеридной информации и частотно-временных поправок;
- ошибки за счет шумов приемника и внешних помех;
- особенности распространения радиоволн в тропосфере и ионосфере.
Высокоорбитальную спутниковую систему «ГЛОНАСС» для навигации космических низкоорбитальных подвижных средств образует орбитальная группировка из 24 навигационных космических аппаратов (НКА), расположенных в 3 плоскостях по 8 НКА в каждой плоскости. В состав системы ГЛОНАСС входит сегмент навигационной аппаратуры пользователей. Высота круговой орбиты группировки - 19,1·103 км над поверхностью Земли.
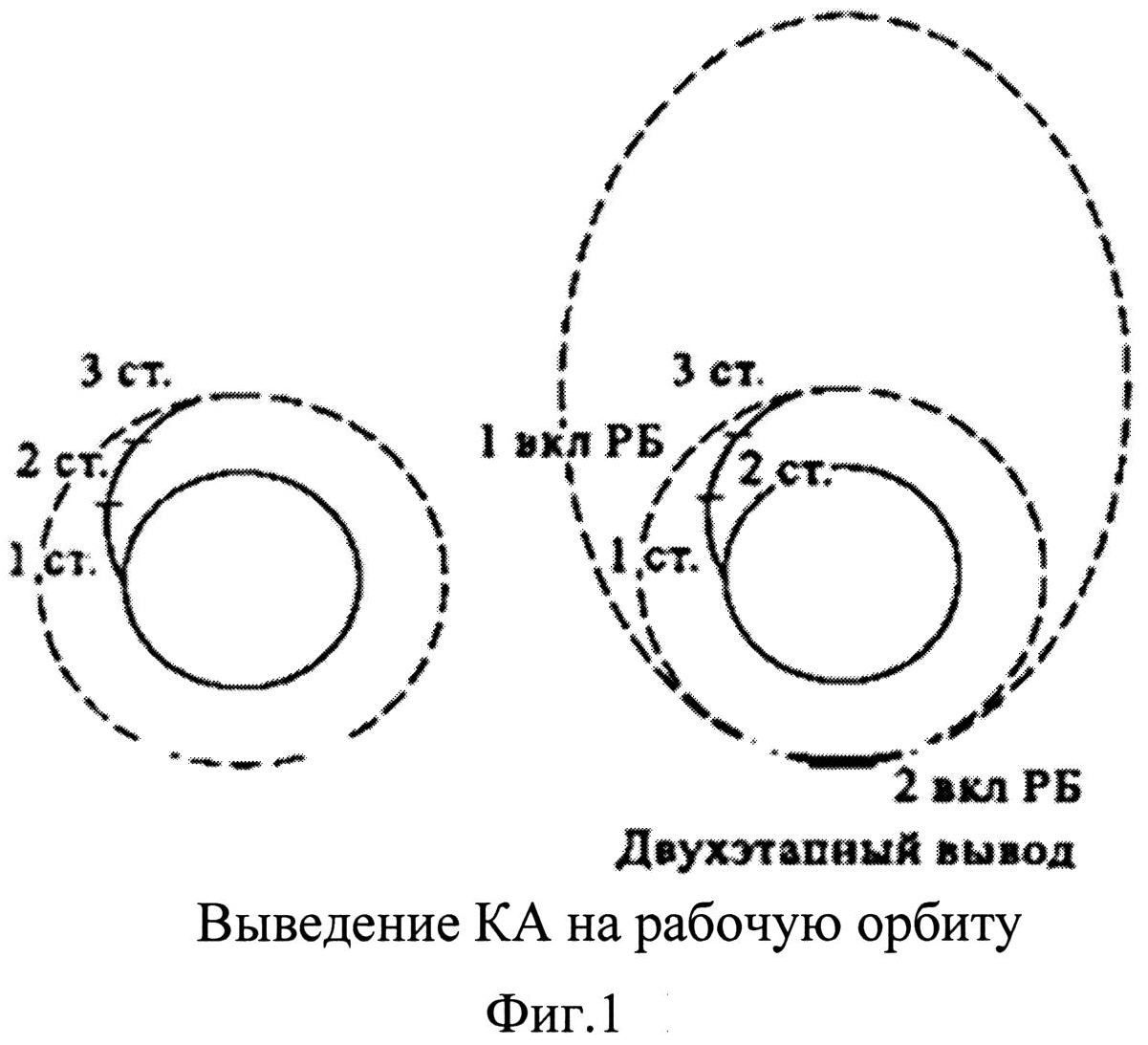
Потребитель в любой точке до высот - 2·103 км над поверхностью Земли принимает сигналы не менее четырех НКА. При высотах более 2·103 км радионавигационное поле становится дискретным в пространстве. Выведение КА на рабочую орбиту показано на Фиг.1. При полете КА по орбите спутника или полет к планете траекторию полета делят на несколько участков: выведения, приземный, перелета, подлета, формирования рабочей орбиты. Коррекции траектории полета КА показаны на Фиг.2.
Развитие средств навигации
В докладе А.В. Васильева [2] рассматривался способ комплексирования аппаратуры потребителя системы ГЛОНАСС и инерциальных навигационных систем на устройстве Фиг.4. Рассмотрены действия способа: выработка управляющих воздействий автономно для изменения траектории полета; показано повышение точности навигационных определений от глубокого комплексирования программного приемника радионавигационных сигналов ГЛОНАСС, микромеханических инерциальных систем (ИНС). На основании выработанных процессором значений проекций вектора ускорения и скорости движения в навигационном вычислителе вычисляют составляющие линейной скорости и координаты местоположения подвижного средства в пространстве, используют информацию для управления центром масс непосредственно на борту подвижного средства.
Схема сигнального процессора содержит: многомерный коррелятор, схему слежения за задержкой радионавигационных сигналов, блок оценки частоты радионавигационных сигналов, схему выделения символов информации, схему поиска сигналов НКА, генератор опорной ПСП. Навигационный процессор выполняет вторичную обработку фильтром Калмана и хранения эфемеридной информации. Блок инерциальной навигационной системы (БИНС) содержит: блок акселерометров, блок гироскопов, навигационный вычислитель БИНС.
К основным блокам радиоприемного устройства отнесены: коррелятор, генератор опорной ПСП, блок поиска сигналов НКА, схемы слежения за задержкой (следящий измеритель дальности) и за доплеровским сдвигом частоты принимаемых радионавигационных сигналов (РСН), схемы выделения символов информации, блок хранения эфемеридной информации, фильтр Калмана, уточненные значения задержки  и доплеровского сдвига частоты
и доплеровского сдвига частоты  .
.
Рассчитанные значения (исходные значения) задержки  и доплеровского сдвига частоты
и доплеровского сдвига частоты  используются в схеме поиска сигналов НКА, схемах слежения за задержкой и доплеровским сдвигом частоты радионавигационных сигналов от каждого НКА системы ГЛОНАСС до борта НАП.
используются в схеме поиска сигналов НКА, схемах слежения за задержкой и доплеровским сдвигом частоты радионавигационных сигналов от каждого НКА системы ГЛОНАСС до борта НАП.
В докладе отмечено, что метод комплексирования при обработке информации позволяет достичь требуемого качества навигационных определений в случае работоспособности измерителей параметров движения. Срывы сопровождения в схемах слежения за задержкой и несущей частотой являлись довольно распространенными, предполагаемая причина - низкий уровень помехоустойчивости аппаратуры потребителя.
В докладе В.Д. Дишель [3] «Методы высокоточной навигации и ориентации, их летная отработка и применение в терминальных инерциально-спутниковых системах управления средствами выведения и спуска с орбит» изложена информационно-страховочная технология интеграции инерциальной и спутниковой навигационных систем, содержащая две фазы полета.
Первая фаза накопления измерительной информации (фаза накопления):
а) прием сигналов (разовые «сырые» измерения АСН) от m различных навигационных космических аппаратов (НКА), в текущем времени t;
б) повторение п. а) периодически на интервалах осреднения  , где µ - шаги определений, на возрастающих интервалах осреднения, текущего времени t участка уточнений;
, где µ - шаги определений, на возрастающих интервалах осреднения, текущего времени t участка уточнений;
в) определяют обобщенные (сглаженные) измерения в шагах осреднения
, в цифровом исполнении бортовым процессором, где µ - шаги определений, на возрастающих интервалах осреднения;
г) определяют, в шагах осреднения
, параметры оценок:
- дальности  ;
;
- скорости  ;
;
- вектора состояния xH(t);
i=0, 1, 2, …, k, ti+1=ti+ΔTизм; tk=tf;
д) формируют вектор разовых измерений размерности 2m h(x, ti);
е) получают оценки вектора обобщенных измерений δJ размерности 2m,
ж) уточняют «интегрируемую траекторию» оценками вектора состояния обобщенных измерений δJ;
з) минимизируют погрешности оценки точности навигации, используя вектор многомерного пространства, линейную фильтрацию, оптимальный фильтр - модифицированный фильтр Калмана.
Вторая фаза точной навигации, операции фазы:
определяют сходимость интегрируемой траектории и вспомогательной интегрируемой траектории;
формируют и передают в НКУ (для контроля) навигационные определения динамического маневра;
определяют управляющие воздействия исполнительных технических устройств;
принимают команду подтверждения реализации навигационных определений;
устраняют отклонения и корректируют траекторию для достижения конечного результата этапа штатной навигации;
выполняют динамический маневр.
Получены положительные результаты информационно-страховочной технологии при летно-конструкторских испытаниях с использованием аппаратуры спутниковой навигации ГЛОНАСС/GPS и наземный комплекс управления (НКУ), при пусках РКК в составе ракеты-носителя «Союз» с разгонным блоком «Фрегат» пусков 2003-2006 гг.[3, стр.180].
В описании заявки на выдачу патента США №20080114544 [10] «Оценка относительного положения между навигационными единицами» приведено гибридное устройство блока навигации. Первый навигационный блок включает в себя гибрид глобальной системы позиционирования (GPS) и инерциальной навигационной системы (INS). Гибридный GPS/INS компонент предоставляет первичную информацию от модуля GPS и от первого блока навигации. Первый навигационный блок выполнен с возможностью приема второй информации GPS и второй информации INS от второго навигационного блока и включает в себя фильтр Калмана.
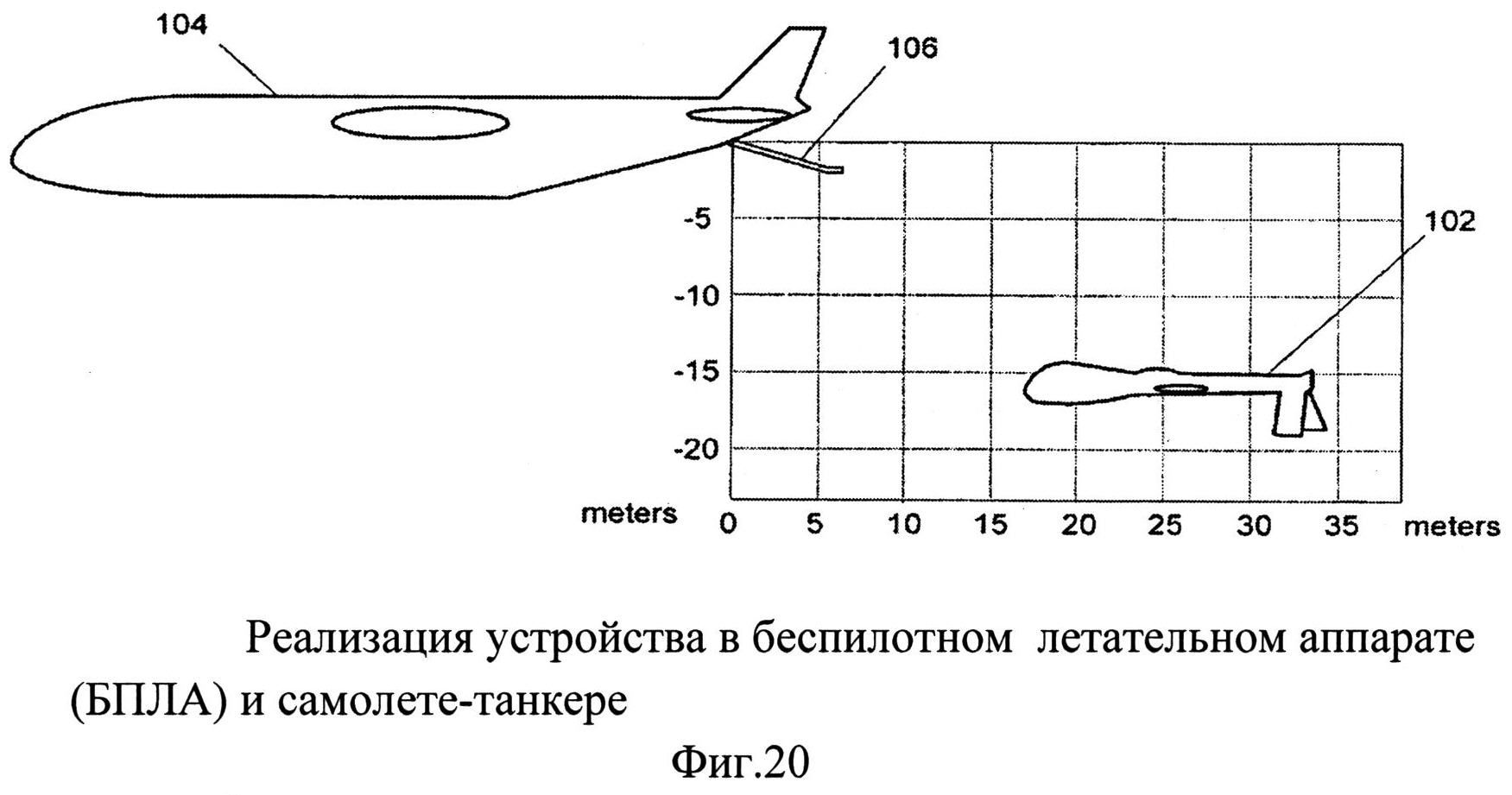
Показано на примерах применение блока навигации для автономной дозаправки в воздухе беспилотного летательного аппарата (первое транспортное средство) танкером (второе транспортное средство) для быстрого и точного соединения заправки стрелы Фиг.20. Другой рассматриваемый пример приложений, точный заход на посадку и посадка самолета (вертолета) на корабль. Важная проблема, которая решается, это автоматическое, надежное, точное взаимное расположение двух движущихся средств.
Компьютерная программа системы позиционирования содержит набор инструкций для получения первой глобальной системы позиционирования: информации НАП, информации инерциальной навигационной системы (INS) для первого транспортного средства, передаваемой на второе летательное средство; информации GPS и INS для второго транспортного средства, определение двойных разностей измерений фазы несущей на основе первой и второй информации GPS; оценки относительной скорости между первым транспортным средством и вторым транспортным средством на основе первого и второго средств INS информации.
Навигационный блок содержит фильтра Калмана, настроенный на обновление оценки INS, который устраняет ошибки оценки относительного положения между первой и второй единицами навигации на основе двойных разностей GPS измерения фазы несущей и первой и второй INS информации.
В рассмотренном устройстве блока навигации, содержащем гибридные системы GPS/INS, выявлены следующие основные отличительные признаки устройства:
КА спутниковой навигационной системы (204 - обозначения на схеме),
первое транспортное средство - беспилотный летательный аппарат (БПЛА) (102), содержащий аппаратуру потребителя НАП, систему позиционирования своего пространственного положения, с навигационным блоком;
второе транспортное средство - танкер (104), содержащий аппаратуру потребителя НАП, систему позиционирования своего пространственного положения, с навигационным блоком;
компьютерная программа позиционирования пространственного положения БПЛА 102 по отношению к танкеру 104 для быстрого точного соединения заправки стрелы 106, как показано на Фиг.20, использующая определение двойных разностей измерений фазы несущей на основе первой и второй информации GPS.
В заявке на выдачу патента США №20120038508 [11] заявлен способ отслеживания сигнала спутника и приемник сигнала. Приемник принимает спутниковый сигнал позиционирования и осуществляет следующие операции: вычисление первой доплеровской частоты использования принимаемого сигнала, полученной посредством приема спутникового сигнала, вычисление второй доплеровской частоты с использованием первой доплеровской частоты, и сигнала от блока датчиков, включающего, по крайней мере, датчик ускорения, и полученный сигнал со спутника с учетом частоты Доплера. Для автомобиля выполнен расчет параметров его движения с использованием индивидуальной инерциальной навигационной системы и космической навигационной системы.
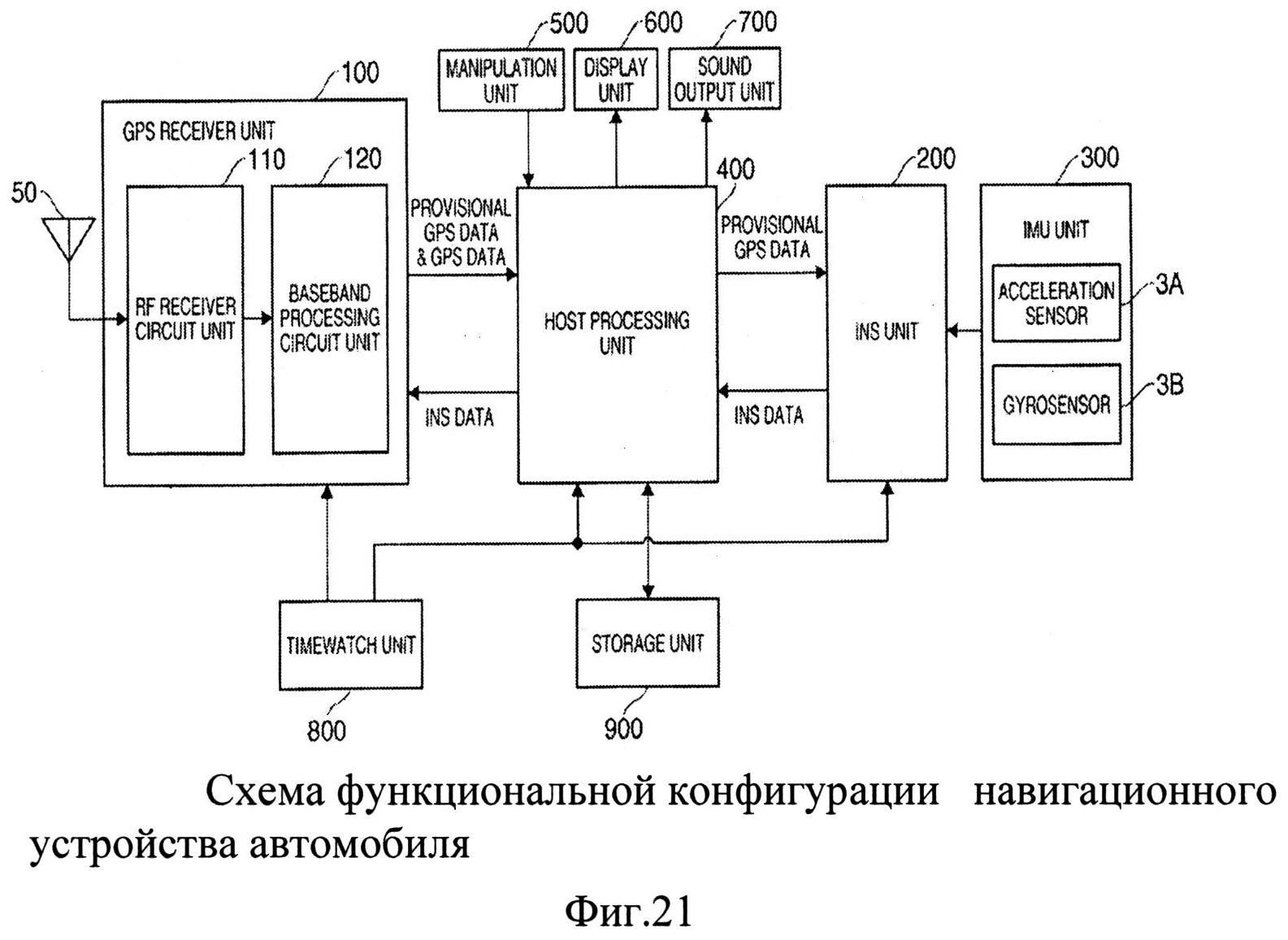
На Фиг.21 представлена блок-схема навигационного устройства автомобиля, содержащего GPS антенну (50), приемник GPS (100), блок инерциальной навигационной системы, главный процессор, устройство клавишного ввода данных, дисплей, блок звукового сообщения, часы и запоминающее устройство, радиочастотный блок, схему приемника (ПО), схему обработки основной полосы частот (120), INS блок (200), главный процессор (400), аппарат для управления (500), дисплей (600), звук (700), часы блок (800), запоминающее устройство (900), которое представляет собой запоминающее устройство для хранения различных видов программ или данных для реализации системной программы или функций навигации.
Сенсорный блок (300), известный как инерционное измерительное устройство, включает датчик ускорения как один из видов инерциальных датчиков. Результаты, полученные сенсорным блоком (300), выводятся в INS блок (200), когда это необходимо.
Главный процессор (400) [0119] представляет собой устройство для управления каждым блоком машины, передает временные GPS данные, выводимые из блока GPS-приемника (100), выполняет процесс отображения на карте, указывает текущее положение транспортного средства. На дисплейном блоке (600) на основании выходного сигнала GPS данных звук служит для навигации голосом (700).
Манипулятор (500) [0120] включает сенсорную панель, переключатель, клавиши, кнопки сигнал, используемые в блоке (400) обработки хоста.
Дисплейный блок (600) [0121], в том числе жидкокристаллический дисплей, - это устройство отображения различной информации на основе входного сигнала.
Экспериментальный результат получения траектории и расчетные значения транспортного средства иллюстрированы результатом: в сильном электрическом поле окружающей среды; под слабым электрическим полем окружающей среды; в условиях многолучевого распространения. Результат под слабым электрическим полем показан схеме Фиг.22. Слабое электрическое поле - точность вычисления сильно падает, истинная траектория не отслеживается (аномальное измерение). Сильное электрическое поле - "превышение" означает явление, при котором вычисление не включается.
В техническом решении применялись следующие признаки операций: цифровая обработка сигналов НКА и инерциальной системы INS процессором с помощью программного обеспечения [0193 - обозначение места в описании заявки на выдачу патента №20120038508]; прием сигналов от НКА [0022]; измерение отношения сигнал/шум несущей частоты в радиоприемном устройстве подвижного средства [0181]; получение измерительной информации с использованием корреляции данных сигналов [0056]; вычисление доплеровских частот от принимаемых сигналов навигационных космических аппаратов (НКА) [0011]; расчет прогнозируемой доплеровской частоты с использованием сигнала от датчиков скорости и ускорения ИНС транспортного средства [0011]; использование петлевых фильтров для выделения сигналов [0022, 0023]; применение запоминания расчетных данных цепи обработки сигналов [0038, 0040]; вычисления псевдорасстояния от аппарата НКА [0057]; вычисления местоположения транспортного средства [0051]; предварительная обработка сглаживанием процесса [0182]; исключение приема «слабых» сигналов в процессе предварительной обработки сигнала (пропуск спутников, дающих слабый сигнал, а также сильный сигнал) [0185], обработка с переходом на следующий НКА [0189]; корректировка совокупной доплеровской частоты и направления движения, получение вектора движения [0193]; повторение процесса прогнозирования с использованием фильтра Калмана, обновление и коррекция процесса состояния системы, уточнение вектора скорости [0083]; вычисления текущего положения транспортного средства, завершение операций вычислительного процесса [0194]; хранение программных блоков навигатора [0124]; отображение карты дисплеем с указанием текущего положения транспортного средства [0119]; формирование звукового сообщения, воспроизведения звука навигатором [0122].
Рассмотренные средства используют в траекторных измерениях обработку информации с использованием динамического фильтра Калмана (of Kalman).
На основе анализа патентно-ассоциированной литературы и патентной документации выявлено значительное количество технических решений, содержащих комбинированные системы управления движением (GNSS/INS) как отдельных транспортных средств: автомобилей, морских и речных судов, самолетов, космических аппаратов, а также использования этих средств комплексно в самолетах (вертолетах) и авианосцах (вертолетоносцах); самолетах-заправщиках и самолетах дальней авиации; космических аппаратах и международной космической станции и т.д.
Поскольку космический аппарат движется с первой космической скоростью (около 6 км/сек), что во много раз больше скорости самолета, автомобиля или морского (речного) судна, возможен значительный сдвиг по частоте радиосигнала из-за эффекта Доплера и замираний. Для транспортных средств, движущихся с различной скоростью, эффект Доплера проявляется по-разному. Для космических аппаратов возможен значительный сдвиг по частоте радиосигнала из-за эффекта Доплера и замираний.
Характеристика прототипов
Способ
Из рассмотренных аналогов прототипом заявляемого способа коррекции траектории космического аппарата выбран способ, изложенный в докладе В.Д. Дишель «Методы высокоточной навигации и ориентации, их летная отработка и применение в терминальных инерционно-спутниковых системах управления средствами выведения и спуска с орбит» [3], а прототипом устройства коррекции траектории космического аппарата выбрано устройство, приведенное в докладе А.В. Васильева «Использование метода глубокого комплексирования программного приемника радионавигационных сигналов ГЛОНАСС и микромеханических ИНС с целью повышения точности и надежности навигационных определений перспективных образцов малых КА» [2].
В информационно-страховочной технологии интегрированной инерциальной и спутниковой навигационной системе содержатся две фазы полета: накопления измерительной информации и точной навигации:
Первая фаза накопления измерительной информации (фаза накопления) содержит:
а) прием сигналов (разовые «сырые» измерения АСН) от m различных навигационных космических аппаратов (НКА), в текущем времени t;
б) повторяют п. а) периодически на интервалах осреднения
, где µ - шаги определений, на возрастающих интервалах осреднения, текущего времени t участка уточнений;
в) определяют обобщенные (сглаженные) измерения в шагах осреднения
, в цифровом исполнении бортовым процессором, где µ - шаги определений, на возрастающих интервалах осреднения;
г) определяют, в шагах осреднения
, параметры оценок:
- дальности  ;
;
- скорости  ;
;
- вектора состояния xH(t);
i=0, 1, 2, …, k, ti+1=ti+ΔТизм; tk=tf;
д) формируют вектор разовых измерений размерности 2m h(x, ti);
е) получают оценки вектора обобщенных измерений δJ размерности 2m;
ж) уточняют «интегрируемую траекторию» оценками вектора состояния обобщенных измерений δJ;
з) минимизируют погрешности оценки точности навигации, используя вектор многомерного пространства, линейную фильтрацию, оптимальный фильтр - модифицированный фильтр Калмана.
Вторая фаза точной навигации, операции фазы:
определяют сходимость интегрируемой траектории и вспомогательной интегрируемой траектории;
формируют и передают в НКУ (для контроля) навигационные определения динамического маневра;
определяют управляющие воздействия исполнительных технических устройств;
принимают команду подтверждения реализации навигационных определений;
устраняют отклонения и корректируют траекторию для достижения конечного результата этапа штатной навигации;
выполняют динамический маневр.
В процессе обработки информации применяют фильтр Калмана, матрица которого учитывает закон распределения случайной величины, разброса измерений.
Получены положительные результаты информационно-страховочной технологии при летно-конструкторских испытаниях с использованием аппаратуры спутниковой навигации ГЛОНАСС/GPS и наземного комплекса управления (НКУ), при пусках РКК в составе ракеты-носителя «Союз» с разгонным блоком «Фрегат» пусков 2003-2006 [3, стр.180].
Устройство
Прототип заявляемого устройства осуществляет прием радиосигнала с одной боковой для устранения глубоких замираний от эффекта Доплера [2], приведен на Фиг.4, и содержит: последовательное соединение антенного блока 1, радиочастотного блока 2 с приемом радиосигналов одной боковой полосы в фазе накопления, аналого-цифрового преобразователя (АЦП) 3 фазомодулированных сигналов, процессоров сигнального 4 и навигационного 5, инерциальную навигационную систему 6 и блок вычисления ожидаемых значений задержки РНС и доплеровского сдвига частоты 7.
Сигнальный процессор 4 содержит: многомерный коррелятор 14, первый выход которого соединен с первым входом схемы слежения за задержкой радионавигационных сигналов (IE, QE; IL, QL) 10, второй выход многомерного коррелятора 14 соединен со вторым входом блока оценки частоты  радионавигационных сигналов (IP, QP) 11, выход
которого соединен с первым входом схемы слежения за задержкой радионавигационных сигналов 10, входом схемы выделения символов информации 12 и выходом схемы выделения символов информации 12; схему поиска сигналов НКА 13, третий вход которой соединен с третьим входом сигнального процессора и вторым входом схемы слежения за задержкой радионавигационных сигналов 10; генератор опорной ПСП 15, выход которого соединен со входом многомерного коррелятора 14, а вход соединен с выходом схемы поиска сигналов навигационного космического аппарата 13.
радионавигационных сигналов (IP, QP) 11, выход
которого соединен с первым входом схемы слежения за задержкой радионавигационных сигналов 10, входом схемы выделения символов информации 12 и выходом схемы выделения символов информации 12; схему поиска сигналов НКА 13, третий вход которой соединен с третьим входом сигнального процессора и вторым входом схемы слежения за задержкой радионавигационных сигналов 10; генератор опорной ПСП 15, выход которого соединен со входом многомерного коррелятора 14, а вход соединен с выходом схемы поиска сигналов навигационного космического аппарата 13.
Навигационный процессор 5 содержит блок алгоритмов вторичной обработки (фильтр Калмана) 8 и блок хранения эфемеридной информации 9. Вход блока хранения эфемеридной информации 9 подключен к третьему входу процессора навигационного, соединенного с третьим выходом процессора сигнального 4, который соединен с выходом ϑinf(t) схемы выделения символов информации 12. Первый и второй входы блока алгоритмов вторичной обработки (модифицированный фильтр Калмана) подключены соответственно к первому и второму входам процессора навигационного, соединенному с соответствующими первым и вторым входами процессора сигнального, которые соответственно соединены с выходом  схемы слежения за задержкой радионавигационных сигналов 10 и с выходом
блока оценки частоты радионавигационных сигналов 11.
схемы слежения за задержкой радионавигационных сигналов 10 и с выходом
блока оценки частоты радионавигационных сигналов 11.
После выведения на орбиту для изменения траектории полета используют спутниковые навигационные системы и командно-измерительные системы, дающие большие точности, чем инерциальная навигационная система 6, содержащая блок акселерометров 17, блок гироскопов 18, соединенные с навигационным вычислителем 16, который соединен с блоком вычисления ожидаемых значений задержки радионавигационных сигналов и доплеровского сдвига частоты 7, выход которого содержит прогнозируемую частоту Доплера  .
.
В обработках информации применяют фильтр Калмана, матрица которого учитывает закон распределения случайной величины, разброс измерений.
Основной недостаток прототипов способа и устройства заключается в том, что комплексирование не учитывает, что в разбросах всех измерений есть составляющие разброса от эффекта Доплера детерминированного происхождения в виде глубоких замираний, дающие отношения сигнал/шум ниже порогового, и искажения.
Раскрытие изобретения
Способ
Технический результат заявляемого способа коррекции траектории полета КА заключается в компенсации детерминированных искажений, вызываемых эффектом Доплера, (устранение глубоких замираний и искажения сигнала) с целью уменьшения разбросов «сырых» измерений и потерь сигнала.
Технический результат достигается тем, что радиоприем сигналов НКА выполняют после вхождения в связь.
1. Способ коррекции траектории полета космического аппарата, содержащий фазу накопления и фазу коррекции траектории полета, характеризующийся тем, что:
в фазе накопления выполняют прием (с одной боковой) сигналов и выполняют действия:
и) определяют спектр быстрого преобразования Фурье (БПФ) начальной установки контрольной частоты F1 образцовых частот;
к) осуществляют прием сигналов от m различных навигационных космических аппаратов (НКА), в текущем времени t, выполнение операций:
выделяют образцовый сигнал (когерентные частоты f1 и f2), формируют блок фазовых отсчетов контрольной частоты, заносят в память;
выделяют фазовые отсчеты радионавигационного сигнала (дальномерного) сигнала («сырых» измерений дальномерного сигнала), заносят в память;
переводят в частотную область быстрого преобразования Фурье (БПФ) фазовые отсчеты контрольной частоты, получают расхождения спектральных составляющих в частотной области;
переводят в частотную область быстрого преобразования Фурье (БПФ) фазовые отсчеты радионавигационного сигнала («сырые» измерения дальномерного сигнала), заносят в память;
устраняют расхождение спектральных составляющих от эффекта Доплера в спектральных составляющих «сырых» измерений радионавигационного сигнала, получают спектр фаз принятого радионавигационного сигнала;
получают фазовые отсчеты радионавигационного сигнала обратным преобразованием Фурье (ОПФ);
б) повторяют п. к) периодически, на интервалах осреднения
, где µ - шаги определений, на возрастающих интервалах осреднения, текущего времени t участка уточнений;
в) определяют обобщенные (сглаженные) измерения в шагах осреднения
, в цифровом исполнении бортовым процессором, где µ - шаги определений, на возрастающих интервалах осреднения;
г) определяют, в шагах осреднения
, параметры оценок:
- дальности
;
- скорости
;
- вектора состояния xH(t);
i=0, 1, 2, …, k, ti+1=ti+ΔТизм; tk=tf;
д) формируют вектор разовых измерений размерности 2m h(x, ti);
е) получают оценки вектора обобщенных измерений δJ размерности 2m,
уточняют «интегрируемую траекторию» оценками вектора состояния обобщенных измерений δJ;
минимизируют погрешности оценки точности навигации, используя вектор многомерного пространства, линейную фильтрацию, оптимальный фильтр - фильтр Калмана;
в фазе коррекции траектории полета космического аппарата выполняют следующие операции:
формируют и передают в НКУ навигационные определения динамического маневра, рассчитанные на борту;
определяют управляющие воздействия исполнительных технических устройств;
принимают команду подтверждения реализации навигационных определений с уточнениями или без уточнений НКУ;
устраняют отклонения для достижения конечного результата этапа штатной навигации, выполняют динамический маневр.
Устройство
Технический результат заявляемого устройства коррекции траектории полета космического аппарата направлен на устранение глубоких замираний и компенсацию детерминированных искажений от эффекта Доплера.
Устройство для коррекции траектории полета космического аппарата содержит: антенный блок, радиочастотный блок, сигнальный процессор, навигационный процессор, блок инерциальной навигационной системы (БИНС), блок вычисления ожидаемых значений задержки радионавигационных сигналов (РНС) и доплеровского сдвига частоты, устройство компенсации паразитного сдвига фаз спектральных составляющих (УК ССС).
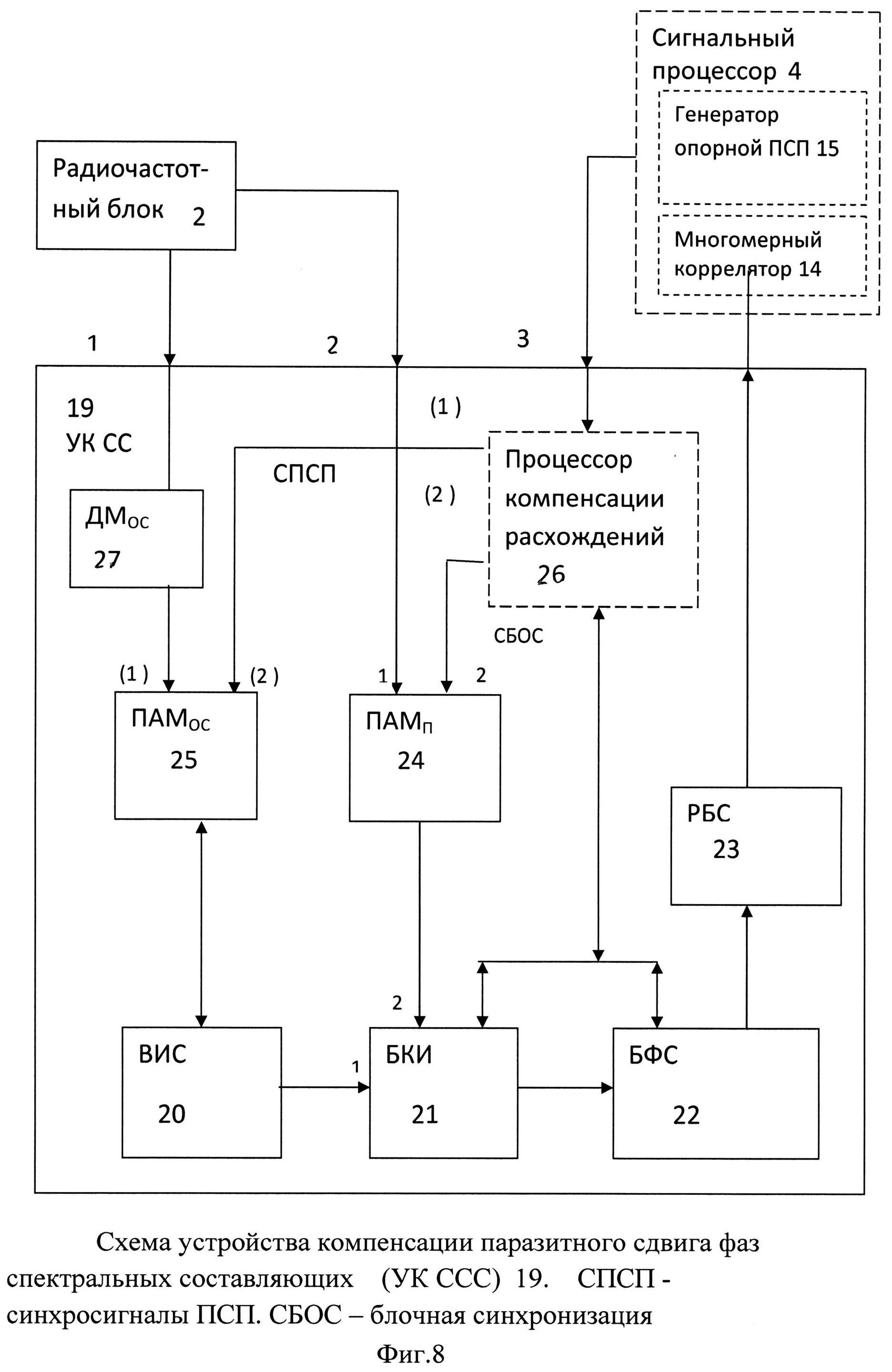
Устройство компенсации паразитного сдвига фаз спектральных составляющих (УК ССС) содержит: демодулятор образцового сигнала (ДМОС), вычислитель искажений образцового сигнала (ВИС), блок компенсации искажений (БКИ), блок отсчетов исправленного фазового сигнала (БФС), решающий блок символьный (РБС), блок памяти фазовых отсчетов сигнала получателя (ПАМП), блок памяти отсчетов образцового сигнала (ПАМОС), подключенный к выходу демодулятора образцового сигнала, процессор компенсации расхождений.
Описание чертежей и детализация устройства
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами (см. Фиг.1-Фиг.19), где показано следующее.
Фиг.1. Выведение КА на рабочую орбиту;
Фиг.2. Коррекция траектории полета КА;
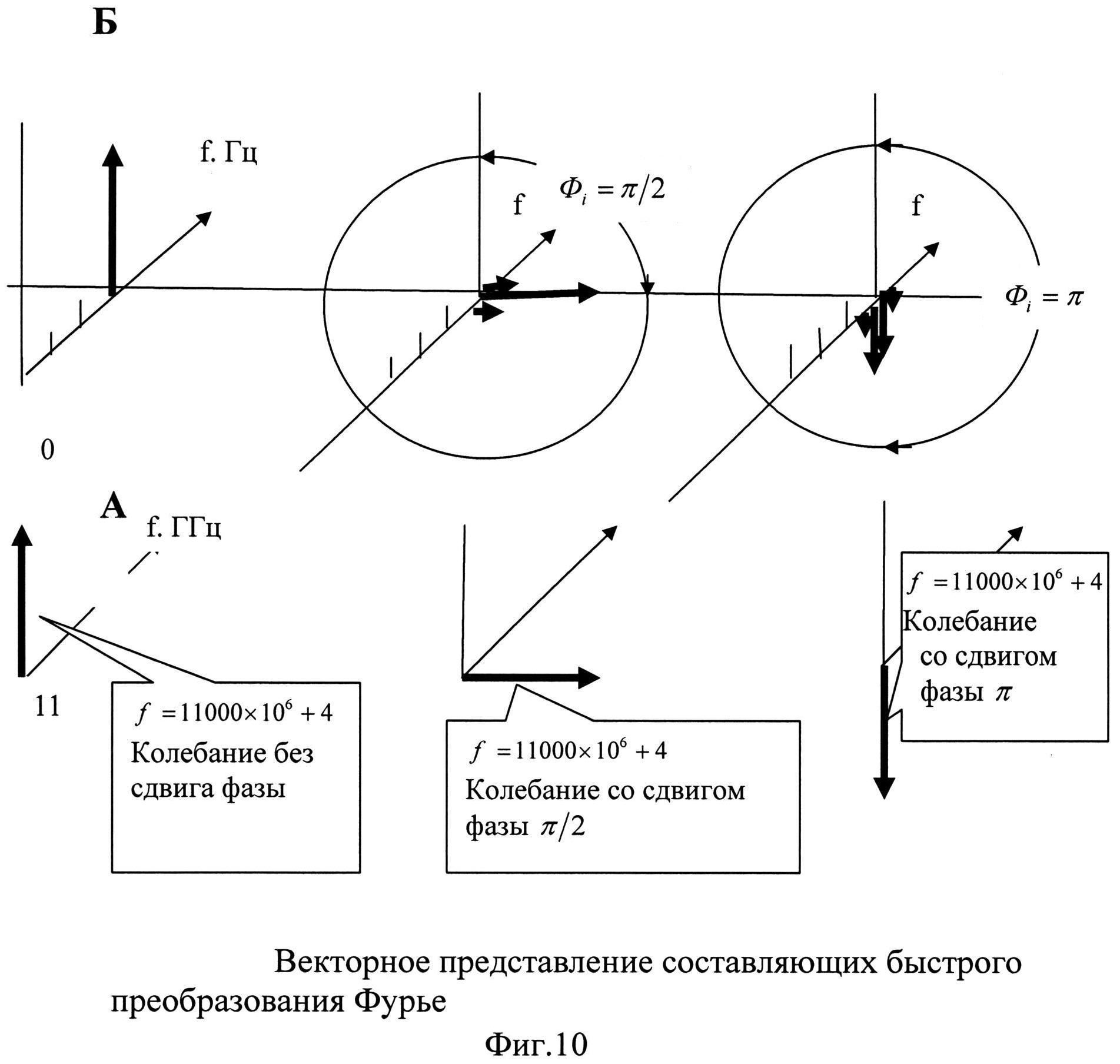
Фиг.3. Графическое изображение последовательности операций в фазе точной навигации;
Фиг.4. Блок-схема устройства навигации спутниковых система, прототип;
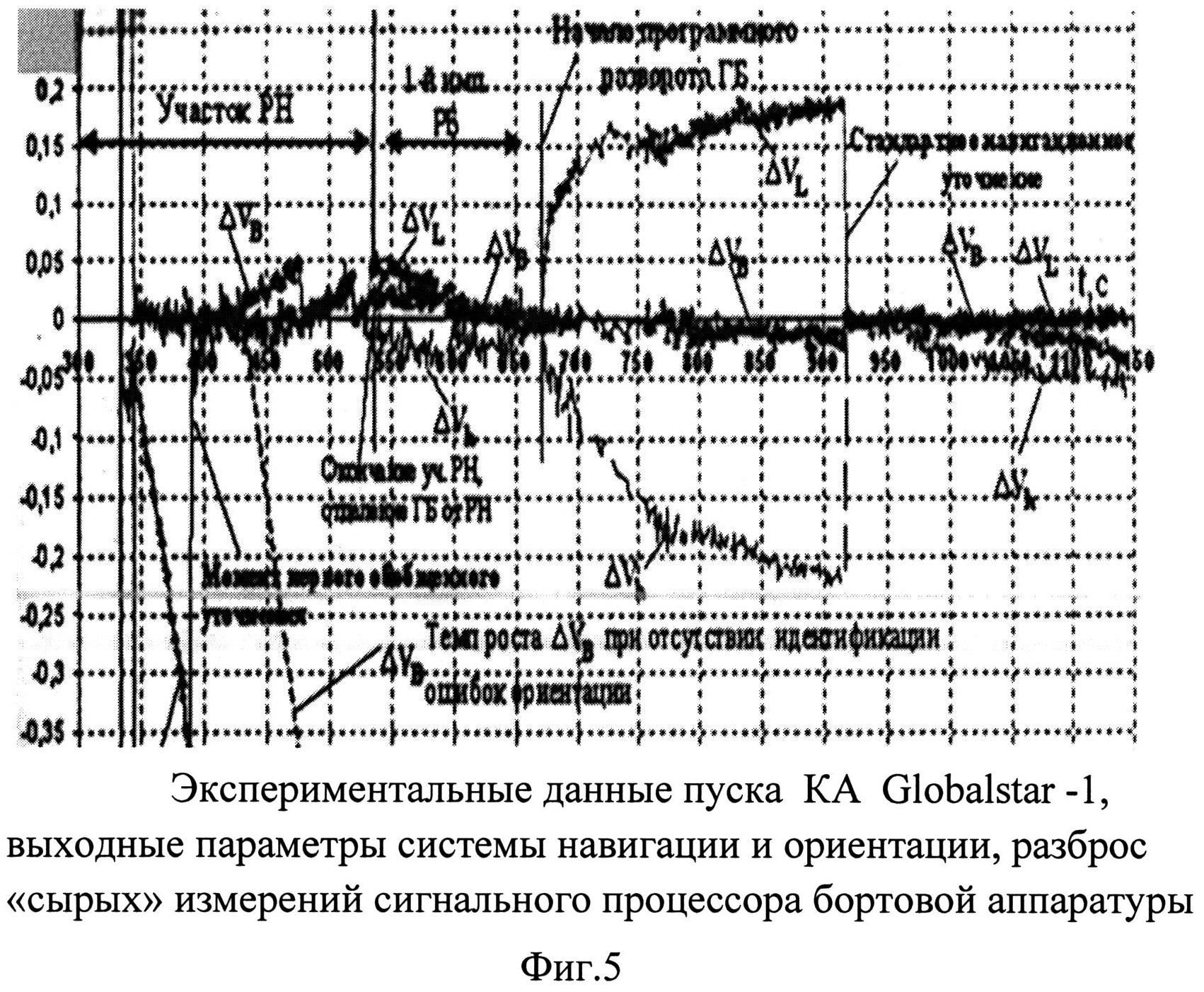
Фиг.5. Экспериментальные данные пуска КА Globalstar-1, выходные параметры системы навигации и ориентации, разброс «сырых» измерений сигнального процессора бортовой аппаратуры;
Фиг.6. Пояснения к процессам отбраковки и сглаживания измерений, интегрирования двух навигационных траекторий (штатной и вспомогательной), ввода фаз накопления информации и точной навигации;
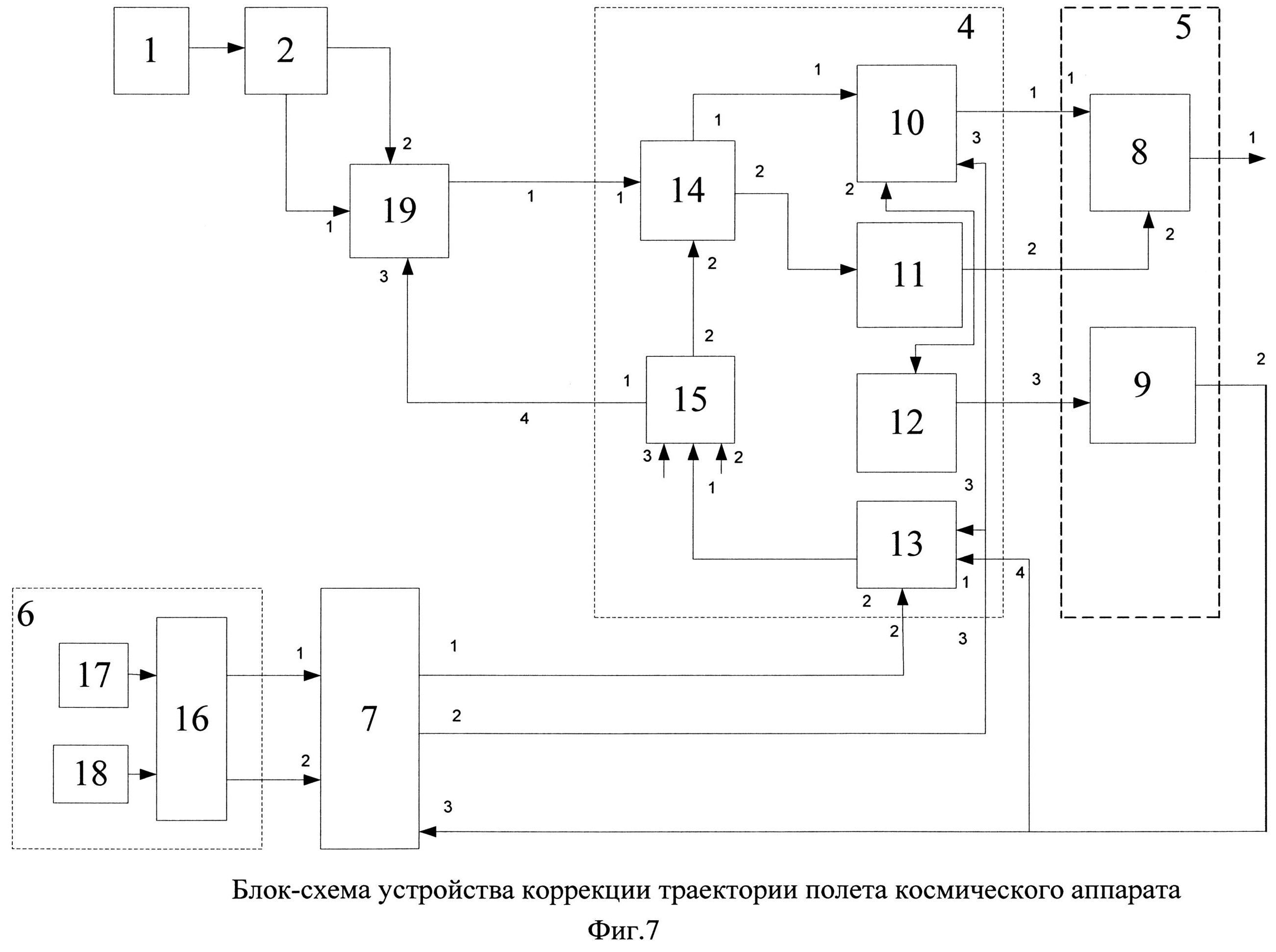
Фиг.7. Блок-схема устройства коррекции траектории полета космического аппарата;
Фиг.8. Схема устройства компенсации паразитного сдвига фаз спектральных составляющих (УК ССС) 19;
Фиг.9. Спектральное представление модулирующей синусоиды;
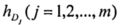
Фиг.10. Векторное представление составляющих быстрого преобразования Фурье;
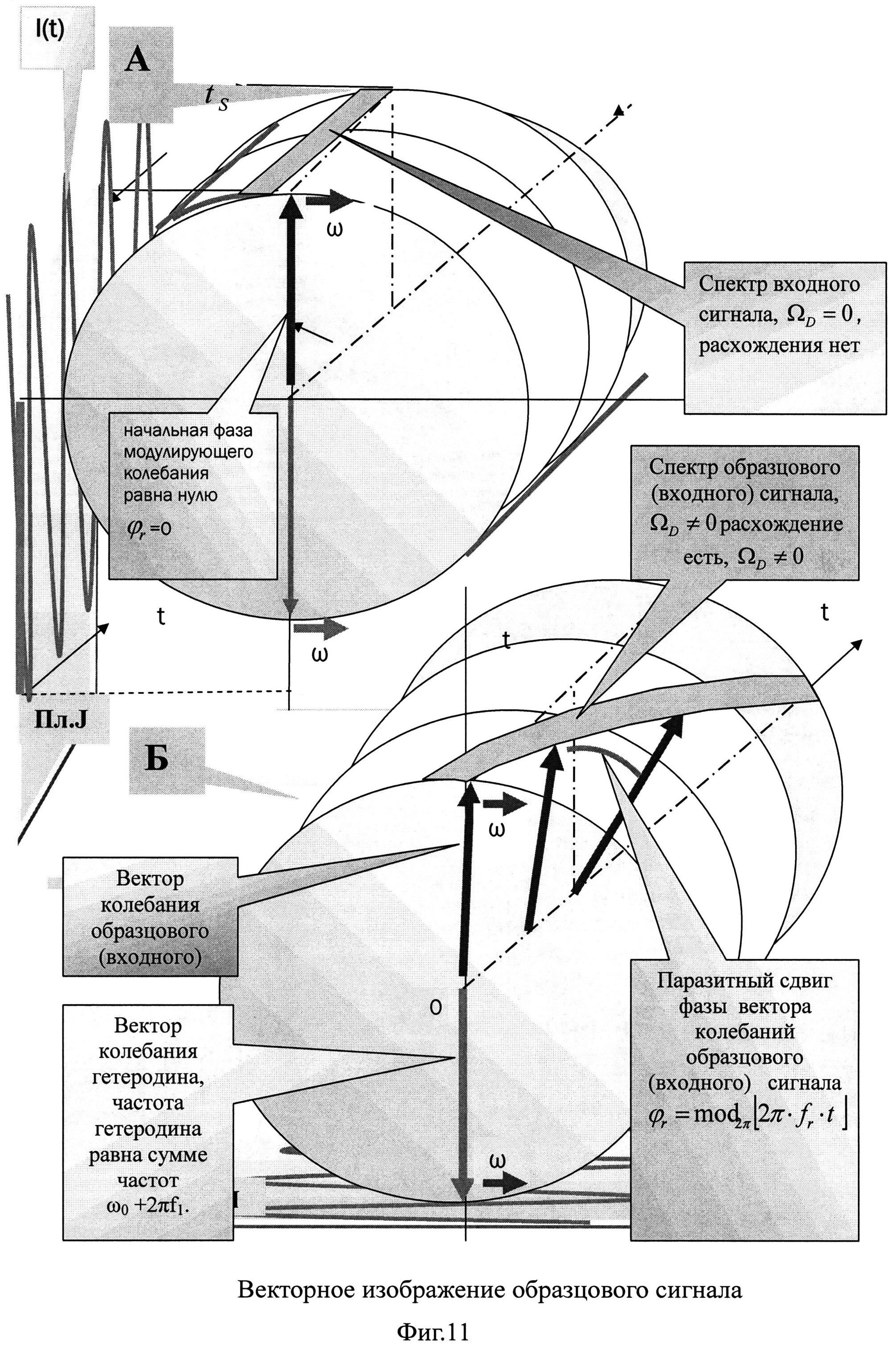
Фиг.11. Векторное изображение образцового сигнала;
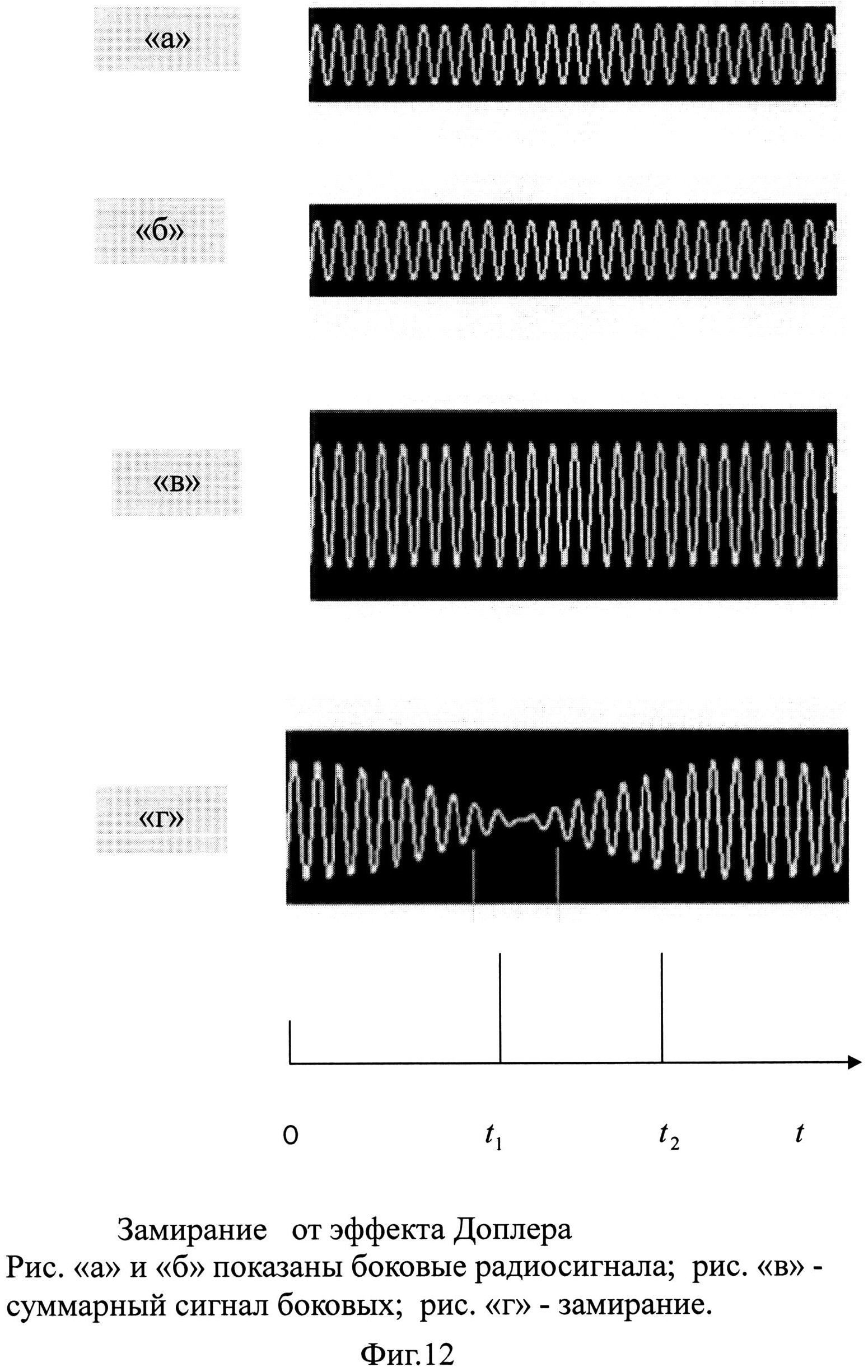
Фиг.12. Замирание от эффекта Доплера;
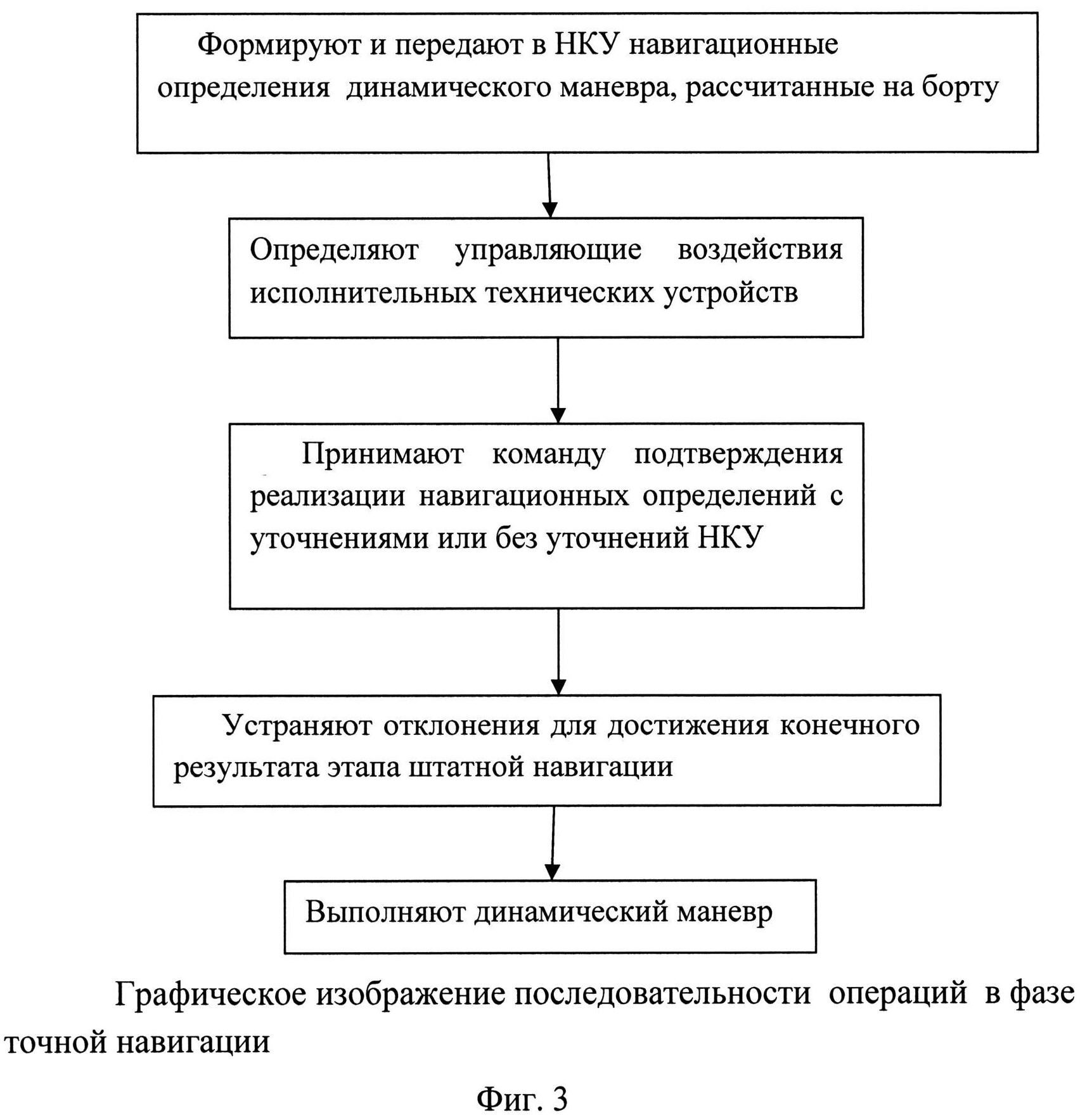
Фиг.13. Сигнал составляющих векторов, где φr=0;
Фиг.14. Сдвиг фаз составляющих, замирание сигнала;
Фиг.15. Сигнал модуляции меандром;
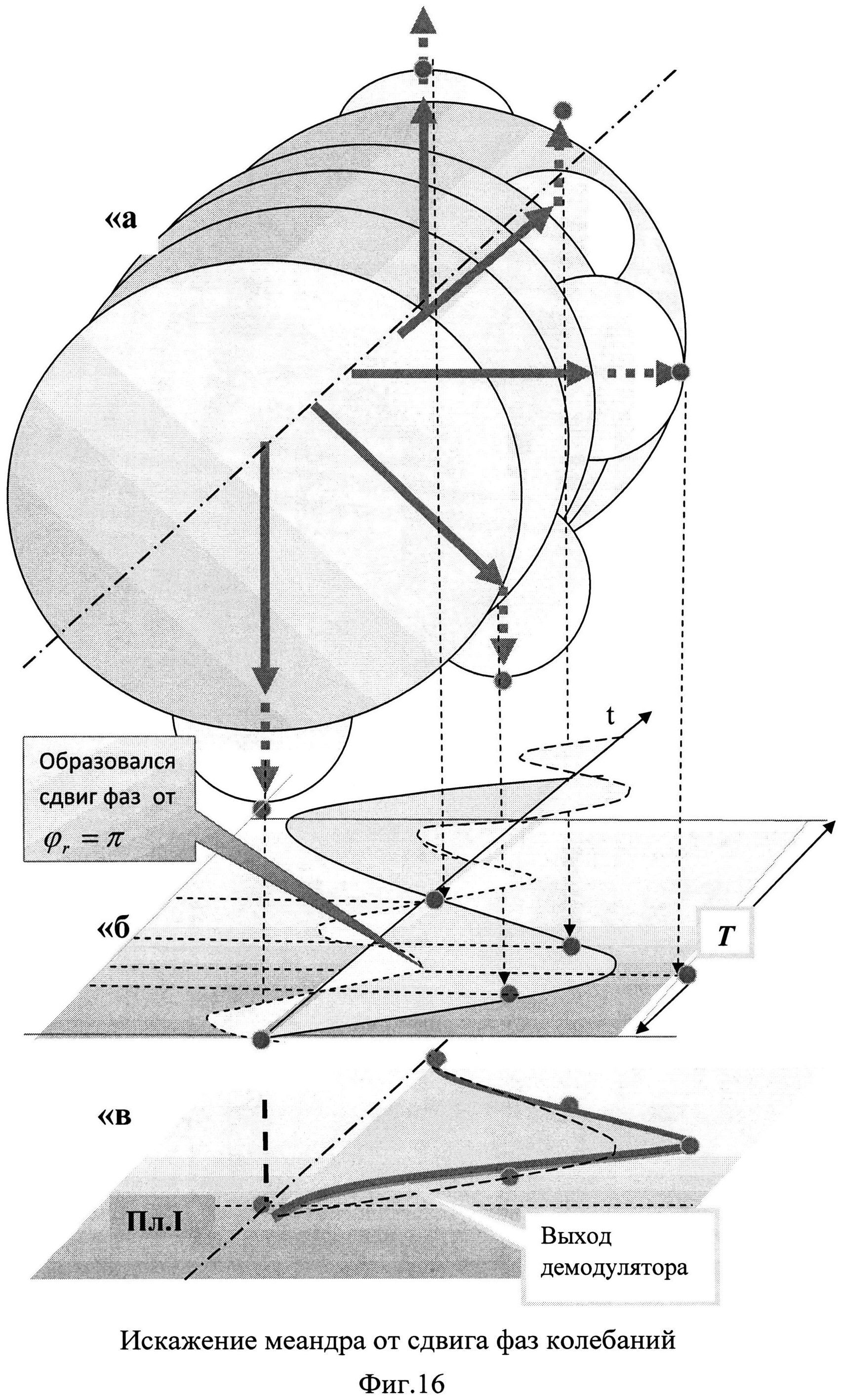
Фиг.16. Искажение меандра от сдвига фаз колебаний;
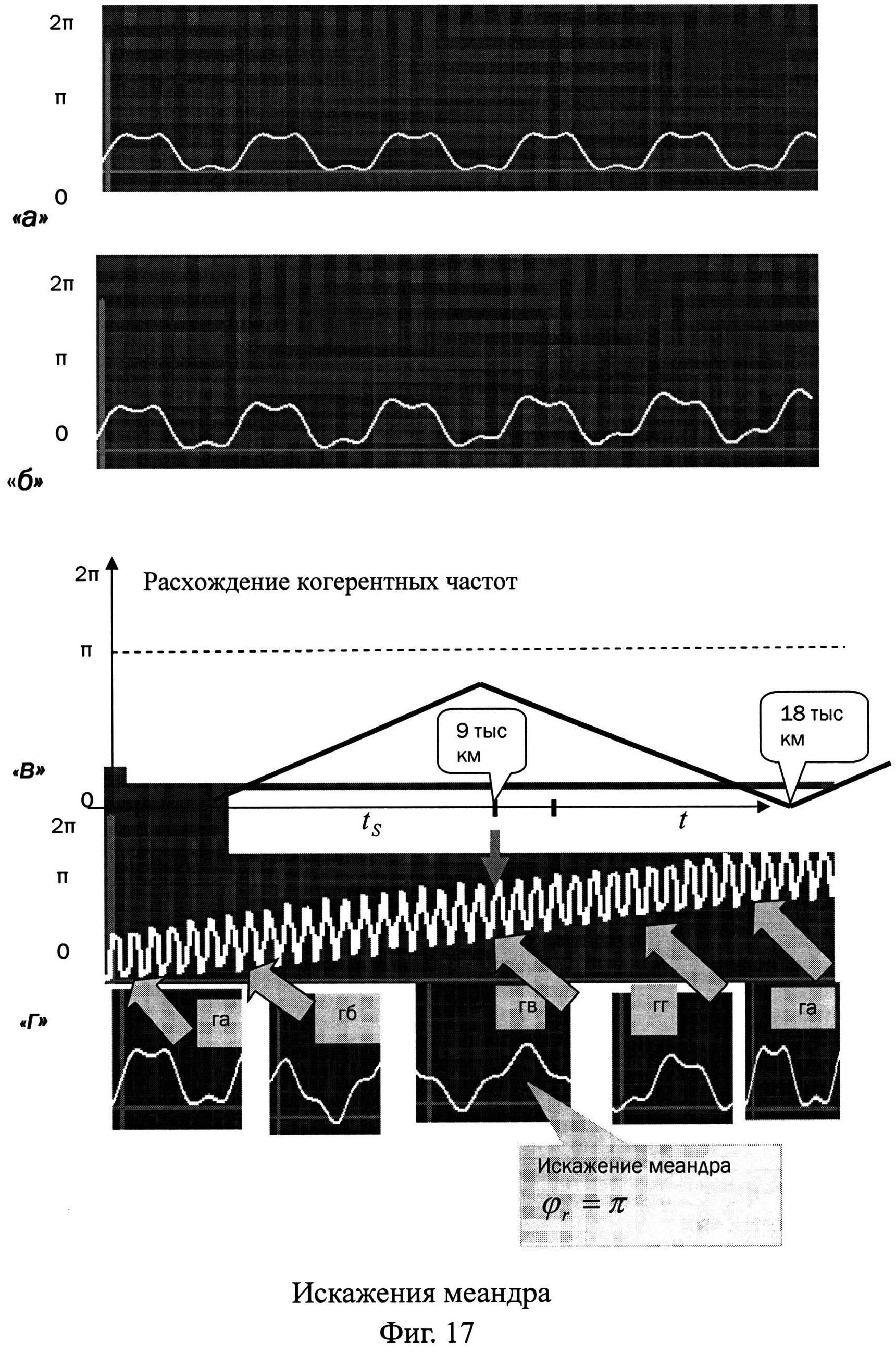
Фиг.17. Искажение меандра;
Фиг.18. Область ошибочных решений решающего блока символьного;
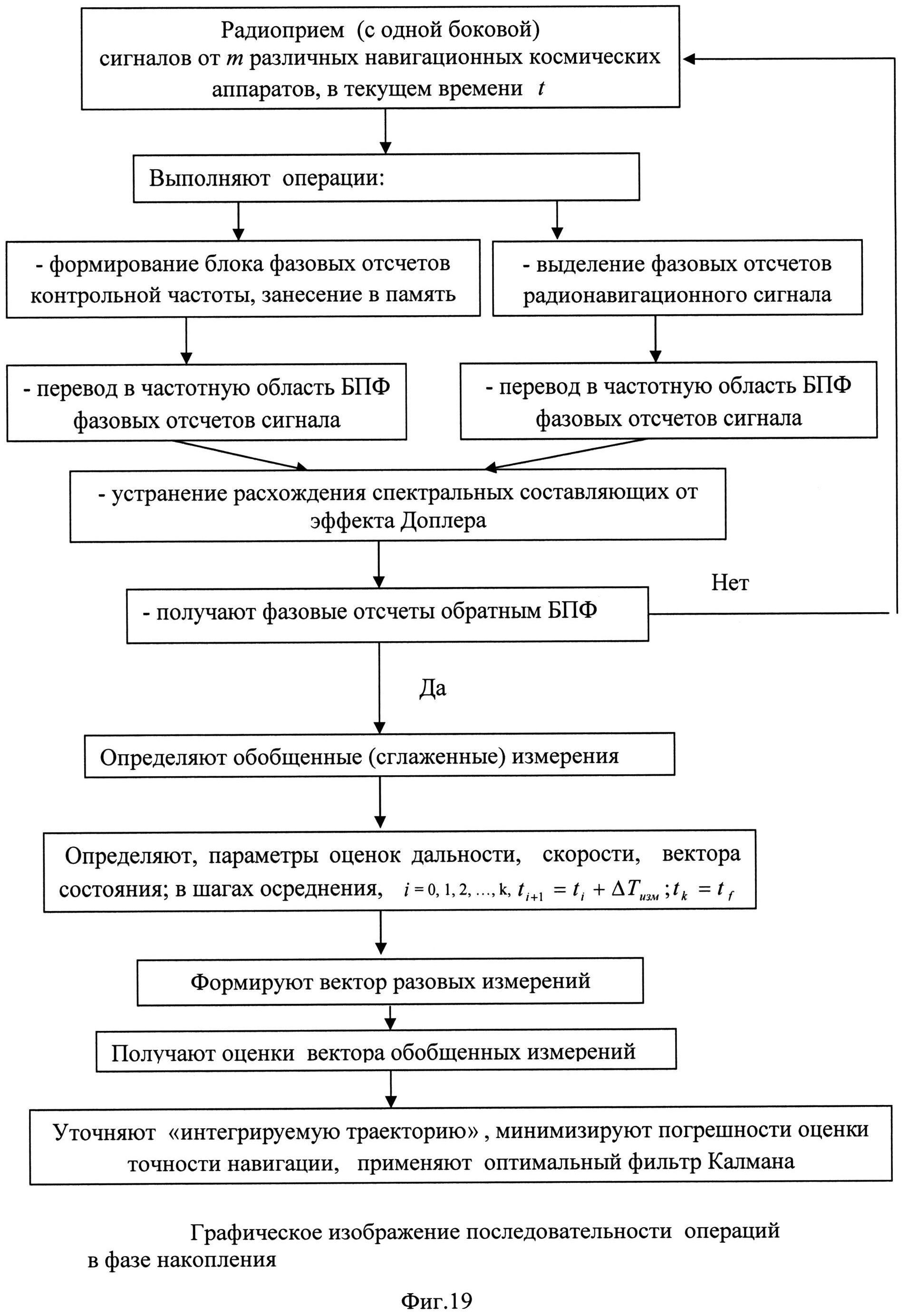
Фиг.19. Графическое изображение последовательности операций в фазе накопления;
Фиг.20. Реализация устройства в беспилотном летательном аппарате (БПЛА) и самолете-танкере;
Фиг.21. Схема функциональной конфигурации навигационного устройства автомобиля;
Фиг.22. Вариант спутникового позиционирования наземного потребителя под слабым электрическим полем.
Заявляемое устройство коррекции траектории полета космического аппарата характеризуется на Фиг.7 следующими взаимосвязанными элементами:
1 - антенный блок;
2 - радиочастотный блок приема радиосигналов;
4 - процессор сигнальный;
5 - процессор навигационный;
6 - блок инерциальной навигационной системы (БИНС);
7 - блок вычисления ожидаемых значений задержки радионавигационных сигналов и доплеровского сдвига частоты;
8 - блок алгоритмов вторичной обработки (фильтр Калмана);
9 - блок хранения эфемеридной информации;
10 - схема слежения за задержкой радионавигационных сигналов;
11 - блок оценки частоты радионавигационных сигналов;
12 - схема выделения символов информации;
13 - схема поиска сигналов навигационного космического аппарата;
14 - многомерный коррелятор;
15 - генератор опорной псевдослучайной последовательности;
16 - навигационный вычислитель блока инерциальной навигационной системы;
17 - блок акселерометров;
18 - блок гироскопов;
19 - устройство компенсации паразитного сдвига спектральных составляющих принятых сигналов НАЛ.
Устройство компенсации паразитного сдвига спектральных составляющих принятых сигналов НАП 19 характеризуется Фиг.8, на которой приведены:
20 - вычислитель искажений образцового сигнала (ВИС);
21 - блок компенсации искажений (БКИ);
22 - блок отсчетов исправленного фазового сигнала (БФС);
23 - второй решающий блок символьный (РБС);
24 - блок памяти фазовых отсчетов сигнала получателя (ПАМП);
25 - бок памяти отсчетов образцового сигнала (ПАМОС),
26 - процессор компенсации расхождений;
27 - демодулятор образцового сигнала (ДМОС).
Устройство коррекции траектории полета космического аппарата, содержащее: антенный блок 1, выход которого соединен со входом радиочастотного блока приема радиосигналов 2; процессор сигнальный 4, содержащий: схему слежения за задержкой радионавигационных сигналов 10, блок оценки частоты радионавигационных сигналов 11, схему выделения символов информации 12, схему поиска сигналов навигационных космических аппаратов 13, многомерный коррелятор 14, генератор опорной псевдослучайной последовательности 15; процессор навигационный, содержащий блок алгоритмов вторичной обработки (фильтр Калмана) 8 и блок хранения эфемеридной информации 9; блок инерциальной навигационной системы 6, содержащий: блок акселерометров 17, блок гироскопов 18, навигационный вычислитель 16, первый и второй входы которого соединены соответственно с выходами блока акселерометров 17 и блока гироскопов 18, а первый и второй выходы соответственно соединены с первым и вторым входами блока вычисления значений задержки радионавигационного сигнала и доплеровского сдвига частоты 7; устройство компенсации паразитного сдвига спектральных составляющих принятых сигналов НАП 19, первый и второй входы которого соединены соответственно с первым и вторым выходами радиочастотного блока приема радиосигналов 2, а третий вход - с четвертым выходом процессора сигнального 4, первый вход процессора сигнального 4 соединен с выходом устройство компенсации паразитного сдвига спектральных составляющих принятых сигналов НАП 19, второй и третий входы процессора сигнального 4 соединены соответственно с первым и вторым выходами блока вычисления значений задержки радионавигационного сигнала и доплеровского сдвига частоты 7, третий вход которого соединен со вторым выходом процессора навигационного 5 и четвертым входом процессора сигнального 4, первый, второй, третий выходы которого соответственно соединены с первым, вторым и третьим выходами процессора навигационного 5, причем первый и второй входы процессора навигационного 5 соединены соответственно с первым и вторым входами блока алгоритмов вторичной обработки (фильтр Калмана) 8, выход которого соединен с первым выходом процессора навигационного 5; первый выход процессора сигнального 4 соединен с выходом схемы слежения за задержкой радионавигационных сигналов 10, первый вход схемы слежения за задержкой радионавигационного сигнала 10 соединен с первым выходом многомерного коррелятора 14, второй вход схемы слежения за задержкой радионавигационного сигнала 10 соединен с выходом блока оценки частоты радионавигационных сигналов 11, входом схемы выделения символов информации 12, со вторым выходом процессора сигнального 4, третий вход схемы слежения за задержкой радионавигационных сигналов 10 соединен с третьими входами схемы поиска сигналов навигационного космического аппарата 13 и процессора сигнального 4, третий выход которого соединен с выходом схемы выделения символов информации 12; четвертый вход процессора сигнального 4 соединен с первым входом схемы поиска сигналов навигационного космического аппарата 13; второй вход процессора сигнального 4 соединен со вторым входом схемы поиска сигналов навигационного космического аппарата 13, выход которой соединен с первым входом генератора опорной псевдослучайной последовательности 15, первый выход которого соединен с четвертым выходом процессора сигнального 4, а второй выход - со вторым входом многомерного коррелятора 14, первый вход которого соединен с первым входом процессора сигнального 4, а второй выход - с вторым входом блока оценки частоты радионавигационных сигналов 11.
Устройство компенсации паразитного сдвига фаз спектральных составляющих (УК ССС) 19, содержит: демодулятор образцового сигнала (ДМОС) 27, вычислитель искажений образцового сигнала (ВИС) 20, блок компенсации искажений (БКИ) 21, блок отсчетов исправленного фазового сигнала (БФС) 22, второй решающий блок символьный (РБС) 23, блок памяти отсчетов сигнала получателя (ПАМП) 24, блок памяти отсчетов образцового сигнала ПАМОС 25, процессор компенсации расхождений 26, причем: первый вход устройства компенсации паразитного сдвига фаз спектральных составляющих (УК ССС) 19 соединен с входом демодулятора образцового сигнала (ДМОС) 27, выход которого соединен с первым входом блока памяти отсчетов образцового сигнала (ПАМОС) 25, второй вход которого соединен с первым выходом процессора компенсации расхождений 26, первый вход процессора компенсации расхождений 26 соединен с третьим входом устройства компенсации паразитного сдвига спектральных составляющих (УК ССС) 19, второй вход которого соединен с первым входом блока памяти отсчетов сигнала получателя (ПАМП) 24, второй вход блока памяти отсчетов сигнала получателя (ПАМП) 24 соединен с вторым выходом процессора компенсации расхождений 16, вход-выход которого соединен с входами-выходами блока компенсации искажений (БКИ) 21 и блока отсчетов исправленного фазового сигнала (БФС) 22, выход которого соединен со входом второго решающего блока символьного (РБС) 23, выход которого соединен с выходом устройства компенсации паразитного сдвига фаз спектральных составляющих (УК ССС) 19; вход блока отсчетов исправленного фазового сигнала (БФС) 22 соединен с выходом блока компенсации искажений (БКИ) 21, второй вход которого соединен с выходом блока памяти отсчетов сигнала получателя (ПАМП) 24, а первый вход соединен с выходом вычислителя искажений образцового сигнала (ВИС) 20, вход-выход которого соединен с входом-выходом блока памяти отсчетов образцового сигнала (ПАМОС) 25.
Этапы полета КА, на которых выполняют коррекцию траектории движения с использованием высокоточной навигации спутниковых систем, приведены на Фиг.1-2, а графическое изображение последовательности операций в фазе точной навигации приведено на Фиг.3.
Сопоставительный анализ схемных решений, приведенных на Фиг.4 и Фиг.7, позволяет сделать вывод, что заявляемое изобретение обладает конструктивными отличиями, обеспечивающими достижение заявленного технического результата по сравнению с прототипом:
радиочастотный блок приема радиосигналов (Фиг.4) имеет один вход и один выход, а радиочастотный блок приема радиосигналов 2 (Фиг.7) имеет один вход и два выхода;
аналого-цифровой преобразователь (АЦП) сигнала потребителя 3 (Фиг.4) имеет один вход и один выход, а устройство компенсации паразитного сдвига фаз спектральных составляющих принятых сигналов НАП (УК ССС) 19 имеет три входа: первый и второй входы устройства УК ССС 19 подключены соответственно к первому и второму выходам радиочастотного бока приема радиосигналов 2, третий вход устройства УК ССС 19 подключен к третьему выходу сигнального процессора 4, который подключен к первому выходу генератора опорной ПСП 15, а выход устройства УК ССС 8 подключен к четвертому входу сигнального процессора 4, соединенного с первым выходом генератора опорной ПСП.
На Фиг.5 приведены результаты данных запуска КА Globalstar-1 по способу выведения на орбиту [3].
На Фиг.6 показано накопление информации в двух фазах прогнозирования коррекции траекторий (штатной и вспомогательной) для точной навигации.
На Фиг.9 приведено спектральное представление модулирующей синусоиды.
На Фиг.10 показано векторное представление составляющих быстрого преобразования Фурье.
На Фиг.11-17 в картинах искажения и замирания использованы схемы преобразований сигналов в приемных устройствах на векторных диаграммах комплексных сигналов [4, стр.27, 31].
На Фиг.11 показано векторное изображение образцового сигнала. В тексте приняты обозначения:
ССПД - средства связи и передачи данных;
«сообщение» - высокочастотный или низкочастотный сигнал приемного устройства во временной форме или спектральном виде, несущий информацию, передаваемую потребителю (ПО);
«образцовый сигнал» - образцовый сигнал sобр[λ,t], высокочастотный или низкочастотный сигнал приемного устройства во временной форме или спектральном виде, используемый для определения расхождения составляющих спектра от эффекта Доплера, передается в радиолинии в сумме с радиосигналом сообщения s[λ,φ(t),t] и сигналом синхронизации s1[λ,t];
sфс[λ,t] - характеристики передаваемого сообщения - сигнала в блоке (начальное смещение φг и параметр Ωг линейного закона изменения смещения во времени);
ес(ti) - отсчеты фазового сигнала в передаваемом блоке данных.
На Фиг.12 показано замирание от эффекта Доплера, прием двух боковых («а» и «б»), суммарный сигнал боковых («в»), замирание («г»).
На Фиг.13 изображен сигнал составляющих векторов, где: φr=0.
На Фиг.14 показано замирание сигнала на выходе демодулятора, сдвиг фаз составляющих равен π, φr=π.
На Фиг.15 приведен сигнал модуляции меандром. Если сдвига фаз нет, то φr=0 (Фиг.15 «б»).
На Фиг.16 изображено искажение меандра Доплером, сдвиг фаз составляющих векторов. Сдвига фаз нет (Фиг.9 «а»): φr=0.
На Фиг.17 показано искажение меандра расхождением фаз составляющих частот.
На Фиг.18 показано возникновение области ошибочных решений решающего блока символьного.
На Фиг.19 приведено графическое изображение последовательности операций в фазе накопления.
На Фиг.20-22 приведены варианты реализации устройств, включающих: беспилотный летательный аппарат (БПЛА) и танкер (Фиг.20); конфигурацию навигационного устройства автомобиля (Фиг.21); вариант спутникового позиционирования наземного потребителя под слабым электрическим полем (Фиг.22).
Осуществление изобретения
Прототип устройства реализации высокоточной навигации при выведении и спуске содержит основные элементы интегрированной системы: средства инерциальной системы управления, сигнальный процессор, навигационный процессор, аппаратура потребителя космической навигационной системы, блоки вычисления ожидаемых значений задержки и доплеровского сдвига частоты. В фазе накопления информации сигнальным процессором 4 выполняют операции одновременного отслеживания поведения двух инерциальных траекторий, отличающиеся содержанием операции приема сигнала одной боковой полосы. Операции отслеживания инерциальных траекторий на Фиг.6 изображены пунктирными линиями. Помимо них сплошной линией условно показана и фактическая траектория, которая считается, разумеется, известной. Вокруг нее в виде хаотических колебаний процесса группируются «сырые» измерения автономной системы навигации (АСН). В одной из интегрируемых траекторий (вспомогательной) уточнения по измерениям АСН осуществляются относительно часто. В другой - штатной - в 3…5 раз реже, причем уточнения выполняют параметрами вектора состояния вспомогательной траектории. До первого уточнения вспомогательной траектории штатная и вспомогательная траектория совпадают, а далее, до фазы точной навигации, - расходятся. В вспомогательной траектории отслеживают изохронные разности между параметрами вектора состояния интегрируемой инерциальной траектории объекта и преобразованными в тот же формат данными АСН (невязки) в темпе полета. Невязки создают случайные ошибки автономной инерциальной системы и добавляемые к ним ошибки разовых измерений. В ошибках измерений используют законы плотности распределения, устанавливают величину допустимой невязки измерений. С наступлением фазы точной навигации начинается постепенное приближение штатной к вспомогательной траектории. В конце участка они сливаются [3, стр.160].
Принцип работы устройства для коррекции траектории полета космического аппарата раскрыт в описании чертежей. Прием одной боковой обеспечивает уменьшение числа аномальных измерений глубоких замираний от эффекта Доплера.
Образцовый сигнал образуют из сигналов навигационной аппаратуры потребителя, предназначенных для устранения ионосферных ошибок, сигналов когерентных частот. Используется устройство компенсации паразитного сдвига спектральных составляющих принятых сигналов (УК ССС).
Шаги фазы накопления. Фазы накопления информации и точной навигации обозначены: [τнq, τkq] - активный участок полета, [τнq] - начало уточнений, [τkq] - конец уточнений; [tн, tк] - интервал осреднения;  - момент обобщенного уточнения вспомогательной траектории;
- момент обобщенного уточнения вспомогательной траектории;  - начало коррекции штатной траектории.
- начало коррекции штатной траектории.
Определяют единичные траекторные измерения параметров движения КА, в виде функции времени [3, стр.161], n интервалов осреднения длительностью Δt, оценки сообщения получателем по смеси, которая наблюдается, и оценки обобщенных (сглаженных) измерений x(ti), ti=iΔt, i=0, 1, …, n.
Рассматривают помехи как случайные процессы, характеризуемые плотностью распределения случайных величин. В обработке x(ti) используют аппроксимацию, линейную фильтрацию с учетом нелинейностей многоальтернативного характера, устанавливают величину аномальных измерений, «аномальные измерения первого типа» и «аномальные измерения второго типа».
Первый тип аномальных измерений выходит за границы допустимых ошибок, второй тип лежит в пределах этих границ, но выходит за границы плотности распределения фазового шума, иллюстрации Фиг.6.
Аномальные измерения первого типа отбраковывают. Определяют разности (невязки) априорно рассчитанных значений параметров вектора состояния и оценок значений полученных обработкой оценок АСН. В конце фазы накопления проверяют свойство сходимости оценок от времени обработки.
На Фиг.8 приведен вариант блок-схемы устройства компенсации паразитного сдвига фаз спектральных составляющих (УК ССС) 19.
Согласованные фильтры приема радиосигнала разделяют радиосигнал образцовых частот и двоичного периодического сигнала PN-последовательности. Сигнал образцовых частот поступает на демодулятор образцового сигнала (ДМОС) 27 устройства компенсации (УК ССС) 8.
На выходе ДМОС 27 образуются фазовые отсчеты контрольной частоты, которые блочно заносят в память образцового сигнала (ПАМОС) 25. Цифровые отсчеты фазового сигнала PN-последовательности из радиочастотного блока 2 поступают в память дальномерного сигнала (ПАМП) 24.
Отсчеты фазового сигнала в цифровой форме синхронизируются тактовой частотой отсчетов, период отсчетов зависит от величины бита τ. Пусть интервал содержит k бит, отсчеты фазового сигнала i=1, 2, 3, …, mk, где m число отсчетов на символ информации по теореме Котельникова.
УК ССС 19 по команде процессора компенсации расхождений 26 вычисляет паразитный сдвиг спектральных составляющих в быстром преобразовании Фурье (БПФ) принимаемого сигнала, компенсирует их в спектре и преобразованием во временную область получает отсчеты фазового сигнала блока отсчетов PN-последовательности. Для определения искажений используется образцовый сигнал.
В вычислениях паразитных искажений используются данные ПАМОС 25 и ПАМП 24. По разнице спектральных составляющих, полученных БПФ, принятого sобр[λ,t] и излученного (неискаженного эффектом Доплера) образцового сигнала, определяют паразитные искажения фаз спектральных составляющих. В спектре сигнала s[λ,φ(t),t] компенсируют паразитные искажения фаз спектральных составляющих и обратным преобразованием БПФ получают вектор отсчетов PN-последовательности временной области. Отсчеты исправленного сигнала поступают во второй решающий блок символьный (РБС) (23), который формирует последовательность бит блока данных (символы «0» и «1»).
В устройствах ВИС (20), БКИ (21) и БФС (22) применено быстрое преобразование Фурье (БПФ) для компенсации искажений. БПФ в частотной области имеет сетку частот. Сетка N частот образуется частотами ω0+ω(i), где ω0=2π·f0, ω(i)=i·Ω, i - номер частоты в сетке, i=0, 1, 2, … N-1. Шаг частот сетки Ω неизменен. Разность соседних частот одинакова, доплеровское смещение разности соседних частот одинаково, обозначим его ΩD. При эффекте Доплера на частотной оси образуются сетка разностных частот i·ΩD и сетка расхождений i·-(ΩD-Ω) при i=0, 1, 2 … N-1.
Эффект Доплера констатирует линейность доплеровского сдвига частоты от составляющей скорости спутника или космического корабля, направленной в точке его расположения вдоль касательной к траектории волны, искривленной в случае неоднородности среды распространения.
Свойство линейности проявляется в изменении расстояния между частотами сетки и изменении каждой частоты сетки с коэффициентом a Д от эффекта Доплера. Возьмем две частоты сетки f1=k1·Ω, f2=k2·Ω, k1, k2 - целые числа, разностная частота F1=f2-f1, когда нет эффекта Доплера. Частоты при эффекте Доплера f1D, f2D, разностная частота F1D=f2D-f1D лежит на частотной оси, где коэффициент линейного изменения частоты от эффекта Доплера a Д, эффект Доплера для точек частотной оси позволяет записать 2πf1D=а Д2πf1, 2πf2D=а Д2πf2, расхождение частот вращения ΩrO=2π(F2D-F1D)=2π(f2D-f1D-f2+f1) образует расхождение векторов колебаний.
В устройстве применен образцовый сигнал с частотами из сетки частот.
Гармонические частоты образцового сигнала (ОС) назовем «подстраиваемая» f1 и «контрольная» f2. ОС передается по радиолинии, выделяется из входного сигнала с выхода первого балансного модулятора и поступает на вход демодулятора и на вход блока памяти отсчетов образцового сигнала ПАМОС 24. Частоты ОС не выходят за границы спектра информационного сигнала. Разностная частота F1=f2-f1, когда нет эффекта Доплера.
Разностная частота F1D=f2D-f1D при эффекте Доплера.
Расхождение ΩКП=2π(f2D-f1D-f2+f1).
Расхождение дает паразитный фазовый сдвиг частот, порождающий искажение сигнала, зависящее от времени tS.
Образцовый сигнал с выхода балансного демодулятора ДМос 27 переносится амплитудным фазовым демодулятором в область низких частот. В устройстве частота гетеродина взята сумме частот ω0+2πf1. В области нулевых частот достигается совмещение частоты и фазы «подстраиваемой» частоты с гетеродином системой автоподстройки, образуется сигнал разности частот ОС - колебание частоты F1 - «контрольной частоты».
Первое БПФ - преобразование контрольной частоты для свободного пространства при отсутствии доплеровского смещения, когда задержки приема нет, tS≈0, (спектр начальной установки контрольной частоты F1). Второе преобразование выполняются в сеансе связи, где от эффекта Доплера, образует спектр колебание частоты F1D. Цифровые отсчеты фаз колебания частот F1 и F1D сохраняются в блоке памяти отсчетов образцового сигнала ПАМОС 25.
В вычислителе искажений образцового сигнала ВИС 20 определяет паразитные фазовые сдвиги спектральных составляющих ОС за время от излучения до приема tS.
ВИС 20 переводит быстрым преобразованием Фурье (БПФ) в частотную область колебания частот f1 и f1D, по которым определяется расхождение контрольной частоты.
Операторы преобразований БПФ известны, прямое и обратное преобразования: cfft(Y), icfft(F), векторы преобразований Y, F. F:=cfft(Y) по аргументам xi:=i·Δ, i:=0…N -1,  .
.
Вектор Y образуют: модули Mi:=|Yi| и фазы Фi:=arg(Yi). Модули - значения отсчетов амплитуд в блоке данных фазового детектора, фазы - отсчеты фаз фазового детектора в блоке данных. Принимаются к обработке векторы отсчетов с числом элементов N=2′′, недостающие элементы дополняются нулями, отсчеты через равные промежутки. В результате прямого преобразования из вектора Y получается вектор Фурье спектра F. Составляющие вектора F: фазы ФFi:=arg(Fi) и модули MFi:=|Fi|. Обратное преобразование БПФ выполняет оператор Y:=icfft(F), F - вектор Фурье спектра. В частотной области разложение по частотам  , где i:=0…N-1. Числа комплексной формы:
, где i:=0…N-1. Числа комплексной формы:
Y:=19,785j+0.15;
Im(Y)=19.785;
Re(7)=0.1
|Z|=23;
arg(Z)=0.1;
J - комплексная единица.
Расхождение фазы контрольной частоты φП=(ΩiD·tS) за время tS в спектральном разложении радианной меры находим по выражению:
φП=nC·2π+φK, где nC - число целых колебаний (2π), φK - фаза расхождения частоты во время сеанса.
Расхождение nC=NMPA-NMP, NMP - номер максимума модуля в спектре излученного сигнала, NMPA - номер максимума модуля в сеансе.
По модулям и фазам спектрального разложения NMP и NMPA в трех вариантах «а», «б», «в» на Фиг.9 определяется полное расхождение фаз за время tS контрольной частоты. В варианте «А» на Фиг.9 показан модуль результирующего вектора и его фаза составляющих.
В варианте «Б» на Фиг.10 показан спектр разложения БПФ, показаны векторы спектральных составляющих. Число составляющих спектрального разложения быстрым преобразованием Фурье i:=0…N-1.
Результирующий вектор представляется суммой N-1 векторов частотного разложения, на Фиг.10 изображены модули векторов разложения. Для определения фазы результирующего вектора будем суммировать часть составляющих векторов, достаточно полно отражающих длину результирующего вектора, например, брать сумму чисел «комплексной формы», образующих экстремум.
Вариант «а» - период колебания содержит целое число периодов колебаний спектрального разложения, т.е. частота колебания совпадает с частотой сетки i частотного разложения БПФ, модуль MFi:=|Fi| максимален, берется NMPA=i, фаза φK=ФFi:=arg(Fi), модули остальных составляющих равны нулю.
Вариант «б» - частота колебания отличается от частот сетки менее чем 0,5 шага, например на 0,25 шага, модуль MFi:=|Fi| максимален, берется NMPA=i. Образуются модули соседних составляющих, убывающие по дальности расположения, фазы составляющих ФFi:=arg(Fi). Определение фазы φK делается по сумме группы составляющих «контрольной» частоты, образующих экстремум, числами «комплексной формы».
Вариант «в» - частота колебания отличается от частот сетки на 0,5 шага. Модуль MFi:=0. Образуются равные модули соседних составляющих, остальные модули убывают по дальности расположения, фазы составляющих ФF1:=arg(Fi).
Результирующий вектор на грани перескока, либо влево либо вправо на 0,5 шага, считаем, что он не перескочил, остался в середине NMPA=i, где максимум модуля равен нулю. Определение фазы φПК делается по сумме группы составляющих «контрольной» частоты, образующих экстремум, числами «комплексной формы».
Полное расхождение фаз контрольной частоты за время tS равно φПК=nC·2π+φK.
Запишем расхождение частоты, вызывающее расхождение фазы Δφ за время Δt в виде частоты  . При Δφ=φПК, Δt=tS получим
. При Δφ=φПК, Δt=tS получим  .
.
Подставляя φПК, определим расхождение на шаг сетки  .
.
Сетка расхождений частот Ω1D=i·Ωr, i:=0…N-1.
Полное расхождение фаз φПi (паразитные смещения) за время tS спектральных составляющих ΩiD определим с использованием формулы для сетки расхождений частот
 , i:=0…N-1
, i:=0…N-1
Блок компенсации искажений БКИ 21 использует вектор φПi паразитного смещения фаз вычислителя искажений образцового сигнала ВИС 20, переводит по команде процессора компенсации расхождений 26, оператором F:=cfft(Y) вектор Y с составляющими: фазы Фi:=arg(Yi), модули Мi:=|Yi|, i:=0…N-1.
Фазы - отсчеты фазового сигнала блока памяти фазовых отсчетов сигнала получателя (ПАМП) 24 отсчетов PN-последовательности. Получаем вектор F с составляющими: фазы ФFi:=arg(Fi) и модули MFi:=|Fi|, i:=0…N-1.
От эффекта Доплера в момент приема меняется только частота, модули сигналов от относительной скорости движения приемника и передатчика не изменяются, поэтому модули векторов MFi частотного разложения при эффекте Доплера считаем неизменными. Изменения частоты за время tS учитываем полным расхождением фаз φПi составляющих частот разложения.
Компенсацию искажений выполняем изменением фаз составляющих частотного разложения. Оператор компенсации искажений:
Фi:=mod2π(arg(Yi)-φПi), для i:=0…N-1.
Фазы ФFi содержат искажения.
На выходе блока компенсации искажений (БКИ) 21 появляется вектор фаз ФFi и вектор модулей MFi i:=0…N-1.
Блок отсчетов исправленного фазового сигнала (БФС) 22 использует векторы Фi, MFi, i:=0…N-1, полученные в (БКИ) 21 по второму входу, преобразует сигнал частотной области во временную область оператором обратного преобразования Y:=icfft(F), где:
вектор F - вектор данных Фурье спектра с составляющими;
Фi - вектора фаз;
MFi - вектор модулей.
Выходом блока отсчетов исправленного фазового сигнала (БФС) 22 является вектор отсчетов фаз Фi:=arg(Yi), i:=0…N-1.
В операторах преобразования сигналов приемного устройства число отсчетов N не меняется, нормировка базисной системы не нарушается, что соответствует требованиям преобразований в БПФ.
В процессоре компенсации расхождений 26, процессоре сигнальном 4, процессоре навигационном 5 хранятся схемы электрические на ПЛИС, ОЗУ, ПЗУ, микропроцессорах, выполненные в виде загрузочных модулей под сигналы КА с априорно известной структурой. Процессоры выполняют выбор загрузочных модулей из программного обеспечения и включают конфигурации приема в сеансе связи.
Устройство компенсации паразитного сдвига спектральных составляющих (УК ССС, 19), по команде процессора компенсации расхождений (26), вычисляет и устраняет паразитный сдвиг спектральных составляющих. Для определения искажений используется образцовый сигнал. В вычислениях паразитных искажений используются данные ПАМОС (25) и ПАМП (24). По разнице спектральных составляющих, полученных БПФ, принятого sобр[λ,t] и излученного (неискаженного эффектом Доплера) образцового сигнала, определяют паразитные искажения фаз спектральных составляющих.
В спектре сигнала s[λ,φ(t),t] компенсируют паразитные искажения фаз спектральных составляющих и обратным преобразованием БПФ получают вектор отсчетов сигнала временной области. Отсчеты исправленного сигнала поступают во второй решающий блок символьный (РБС) 23, который формирует последовательность бит блока данных (символы «0» и «1»).
В зависимости от частоты Доплера период образования глубоких интерференционных замираний и искажений сигнала от паразитного детерминированного сдвига спектральных составляющих различен. При эффекте Доплера на разных дальностях образуются зоны: замирания сигнала, зоны искажения сигнала от эффекта Доплера и зоны, где влияние эффекта Доплера не проявляется. В случае приема сигнала с одной боковой исключается замирание сигнала от эффекта Доплера.
На Фиг.12 приведены картины замирания сигнала, которые на разной дальности приема от эффекта Доплера носят периодический характер, на «а» и «б» показаны составляющие радиосигнала, на Фиг.12 «в» - суммарный сигнал боковых, на Фиг.12 «г» - замирание, паразитное уменьшение амплитуды до нуля в момент приема.
На Фиг.13-16 в картинах искажения и замирания использованы схемы преобразований сигналов в приемных устройствах на векторных диаграммах комплексных сигналов [9, стр.27, 31].
На Фиг.13 изображен сигнал составляющих векторов, где: φr=0. Сигнал модуляции меандром.
На Фиг.14 показано замирание сигнала, сдвиг фаз составляющих равен π, φr=π.
На Фиг.15 приведен сигнал модуляции меандром. Если сдвига фаз нет, то φr=0 (Фиг.15 «б»).
На Фиг.16 изображено искажение меандра Доплером, сдвиг фаз составляющих векторов. Сдвига фаз нет (Фиг.9 «а»): φr=0.
На Фиг.17 показано искажение меандра расхождением фаз составляющих частот.
На Фиг.18 показан пример возникновения области ошибочных решений решающего блока символьного от искажения сигнала паразитным сдвигом фаз составляющих частот.
В заявленном устройстве присутствуют операции технического уровня общепринятые:
- прием одной боковой полосы не отображен на схеме, но предполагается в наличии, формирование приема сигнала одной боковой известно, например [7, стр.233],
- усиления, фильтрации и преобразования на промежуточную частоту, которые не показаны на фигурах, но предполагаются в наличии,
- действия способа передачи и приема сигналов реализуют по необходимости не только в аппаратном, но и программном виде,
- выделение тактовых частот из принимаемых сигналов с использованием фазовой автоподстройки частоты,
- использование прямого преобразования Фурье,
- использование обратного преобразования Фурье,
- аналого-цифровые преобразования, преобразующие компоненты принимаемого сигнала (фазовый сигнал фазовой модуляции) в цифровые отсчеты,
- локализации отдельных видов помех и их спектрально-временная фильтрация,
- переход в частотную область сигнала для цифровой фильтрации радиопомех,
- слежение за доплеровским сдвигом частоты принимаемых радионавигационных сигналов,
- применение фильтра Калмана, для получения навигационного решения, в котором текущее решение формируется на основе предыдущего решения и его ковариационной матрицы, содержащей в себе информацию о точности, в случае, когда радионавигационное поле оказывается дискретным в пространстве, предотвращение ухудшения точности достигается применением информации НАП и КИС,
- слежение за задержкой принимаемых радионавигационных сигналов,
- поиск сигналов НКА,
- выделение символов информации,
- расчет значения задержки  ,
,
- расчет доплеровского сдвига частоты  ,
,
- введение вторичной обработки информации,
- формируют и передают в НКУ (для контроля) навигационные определения динамического маневра;
- определяют управляющие воздействия исполнительных технических устройств;
- принимают команду подтверждения реализации навигационных определений;
- хранение информации,
- использование высокоскоростных процессоров для БПФ, например, суперкомпьютер Мини Тера, с процессором - Р11/300 MHz, 1 триллион опер/сек, оперативная память 128 Мб, дисковая память - до 40 Гб (данные Ассоциации «Информатика Мобильного общества», для цифровой обработки).
В ходе каждого стандартного интервала осреднения
с заданной периодичностью формируют вектор разовых измерений [3, стр.164-175] h(х, ti) размерности 2m, i=0, 1, 2, …, k, ti+1=ti+ΔТизм; tk=tf,
где в m число различных навигационных космических аппаратов (НКА), получают оценки дальности
и оценки скорости
.
Из совокупности (2m×k) разовых измерений образуют вектор обобщенных измерений, который включает операции сглаживания и сжатия совокупности измерений. Полученную оценку привязывают к середине интервала
, момент этот обозначают  . Сглаживание невязок измерений со сжатием их совокупности выполняют до одного так называемого обобщенного измерения. Случайные разбросы обобщенных измерений (они изображены отдельными черными точками) оказываются существенно ниже исходных ежесекундных «сырых» измерений. Сформированные осреднения вновь подвергаются сравнительному анализу.
. Сглаживание невязок измерений со сжатием их совокупности выполняют до одного так называемого обобщенного измерения. Случайные разбросы обобщенных измерений (они изображены отдельными черными точками) оказываются существенно ниже исходных ежесекундных «сырых» измерений. Сформированные осреднения вновь подвергаются сравнительному анализу.
Применяют вторичную обработку - установление связи измеряемых параметров с оценкой траектории - вектора состояния x(t)=(ν(t),r(t))T, используют нелинейные преобразования, применяют фильтр Калмана. Получают навигационный аналог вектора состояния xH(t), который состоит из компонент вектора ошибок измерений ν(t) и координат радиус-вектора r(t), [3, стр.164].
Колебания процесса (от измерений АСН) относят к виду шумовых составляющих. В обработке используют диагональную матрицу размера (2m×2m) интенсивности шумов измерений, которые по предположению являются белыми и имеют плотность со значениями параметров H(0,σ2) [3, стр.166].
Шаги в фазе точной навигации в контуре наведения и управления на участке выведения и спуска. По принятым единичным измерениям получают осредненные интервальные оценки параметров движения, получают группы интервальных оценок периодически с периодом Δt; оптимизируют передачу сообщения. По групповым оценкам с возрастанием i получают оценки обобщенных (сглаженных) измерений x(ti), ti=i Δt, i=0, 1, …, n. Одновременное с учетом поступающих инерциальных измерений ведут интегрирование двух инерциальных траекторий:
- интегрируемая траектория;
- вспомогательная интегрируемая траектория.
На активном участке полета получают оценки вектора состояния, каждая последующая оценка уточняется, предполагают, что по мере обработки очередного измеряемого параметра оценка будет все более приближаться и истинному значению [3, стр.174]. Последняя оценка дальности учитывает все прежние оценки, оценка зависит от всех компонент навигационного вектора состояния.
Шаги в фазе изменения траектории полета. Используя данные НКА и данные КИС, бортовую шкалу времени, систему координат многомерного пространства, БКУ минимизирует оценки точности навигации, используя вектор многомерного пространства, линейную фильтрацию, оптимальный фильтр - фильтр Калмана. По навигационной информации бортовой комплекс управления выполняет управляющие воздействия устранения отклонений и коррекции траектории для достижения конечного результата этапа штатной навигации. Формирует и передают для контроля навигационные определения динамического маневра на Землю в ЦУП.
На Фиг.19, Фиг.3 приведено графическое изображение последовательности операций заявляемого технического решения.
Использованием способа можно реализовать реконфигурацию приема сигнала с двумя боковыми и двух вариантов одной боковой одновременным началом работы. Если первый результат навигационных определений динамического маневра при этом не удовлетворяет заданным требованиям, то выполнение второго и третьего способа не прерывают. Каждый последующий вариант отличается возрастанием объема вычислений и разработкой алгоритма анализа и сравнения результатов навигационных определений.
Оценка эффективности
Метод высокоточной навигации в терминальных системах при выведении и спуске, прототип. Информационно-страховочные технологии наведения и управления обеспечивают выведение и спуск с орбиты с заданной точностью. Фазу накопления минимизируют применением частоты посекундных отсчетов, что обеспечивается радионавигационным полем.
Изменения траектории полета КА могут происходить в условиях, совпадающих и отличных от условий выведения и спуска с орбиты. Практически может быть радионавигационное поле НКА дискретного пространства; уменьшение дальности НКА до потребителя НАП, что резко увеличивает мощность принимаемого сигнала; образование затенений на трассе приема; выход из зоны видимости антенны, неожиданное изменение доступа НКА провайдером услуг.
Длина фазы накопления может увеличиваться от сокращения рассчитываемого числа космических аппаратов (НКА) орбитальных группировок. В результате длина фазы накопления и набор необходимой статистики не бракуемых измерений увеличивается. Снижение бракуемых измерений становится актуально. Предложенный способ становится полезным в решении практических задач.
Рассмотрим расхождения фаз колебаний принимаемых когерентных эталонных частот.
Искажения от ионосферы. Ионосфера влияет на расхождение фаз колебаний, расхождения определяют ошибки измерения координат. Составляющие ошибок зависят от времени года, времени суток и солнечной активности, наилучшие результаты получают выбором времени коррекции. Формула изменения разности фаз принятых колебаний f1, f2 от прохождения участка ионосферы Δh со средней электронной плотностью Nэ.ср известна  [8, стр.187]. Получим расхождение колебаний когерентных частот (кГц), f1=124400С, f2=1600000 от прохождения ионосферы, разностная частота f2-f1=356·103, Nэ.ср=105 эл/см3 [2 стр.130], Δh=600·103 м, с=3*108 м/с.
[8, стр.187]. Получим расхождение колебаний когерентных частот (кГц), f1=124400С, f2=1600000 от прохождения ионосферы, разностная частота f2-f1=356·103, Nэ.ср=105 эл/см3 [2 стр.130], Δh=600·103 м, с=3*108 м/с.
 ;
;  ;
;  ;
;  . Результат Δφ=0,00662·π.
. Результат Δφ=0,00662·π.
Изменения состояния ионосферы, параметров Nэ.ср, Δh, дает разброс ионосферных ошибок, в худшем 21-42 м по координатам и 64-102 м по высоте, в лучшем случае (минимальная солнечная активность, ночь) 5-7 м по координатам и 6-10 м по высоте [1 стр.232].
Искажения от эффекта Доплера
Получим расхождение колебаний волн от эффекта Доплера частот, рассмотренных выше. Размерность значений частот далее «Гц». Пример расхождения и искажения формы сигнала на модуляции несущей частоты меандром, Фиг17. Случай приема одной боковой полосы частот, частоты ω0+Ω=2π·fH, ω0+kΩ=2π·fB, k=3. При приеме сигнала в отсутствие доплеровских смещений форма принятого сигнала показана на фиг.17 «а». Несущая частота f0=1066×106, составляющие, fH=1066×16+178×106, fB=1066×106+534×106, разностная частота Δf=fB-fH=356·106. Для доплеровского смещения несущей частоты 50×103, f0Д=1066×106+50×103
fНД=1066×106+50×103+178×106+8,35
fВД=1066×106+50×103+534×106+25,05
Разностная частота ΔfД=fВД-fНД=356×106+16,7
Расхождение fr=ΔfД-Δf=16,7.
Расхождение когерентно излученных частот приводит к образованию сдвига фазы φr, φr=mod2π[2πfrtS5]. Сдвиг фаз φr=π достигается за время tS=30 мс, волна проходит путь 9 тыс.км. Форма меандра изменилась, рисунок фиг.17 «в», изменение относительно «а». На меньшем расстоянии НАП созвездия от НКА расхождение уменьшается, уменьшение показано на Фиг 17 «в».
Из сравнения расхождений от ионосферы и эффекта Доплера, приведенного на Фиг.17 «в», следует, что расхождения от эффекта Доплера (18-20·103 км НАП от созвездия от НКА) могут быть существенно больше, следовательно, ошибки по координатам от доплеровских смещений в измерениях более существенны.
В заявленном техническом решении:
учтено преимущественное влияние доплеровского смещения на расхождение когерентных частот по сравнению с ионосферой на дальности 18-20·103 км;
получен способ увеличения числа предельно допустимых значений сырых отсчетов уточнением навигационного вектора состояния xH(t) за счет исключения аномальных ошибок, детерминированного происхождения от эффекта Доплера из диагональной матрицы интенсивности шумов измерений σ2, используемой во вторичной обработке ОФК в оптимизации динамического фильтра Калмана в контуре управления;
получен способ уменьшения фазы накопления информации путем увеличения числа предельно допустимых значений сырых отсчетов и предложено устройство, реализующее указанный способ.
Список литературы
1. Е.П. Молотов. Наземные радиотехнические системы управления космическими аппаратами. Москва, ФИЗМАТЛИТ, 2004. Труды ФГУП «РНИИ КП».
2. А.В. Васильев «Использование метода глубокого комплексирования программного приемника радионавигационных сигналов ГЛОНАСС и микромеханических ИНС с целью повышения точности и надежности навигационных определений перспективных образцов малых КА», IV НПК «Микротехнологии в авиации и космонавтике», РАН, Москва, 2006.
3. В.Д. Дишель «Методы высокоточной навигации и ориентации, их летная отработка и применение в терминальных инерциально-спутниковых системах управления средствами выведения и спуска с орбит», ИКИ РАН Сборник трудов, Россия, Таруса, НТК, 22-25 сентября 2008 г С.157-190.
4. Описание полезной модели «Устройство радиоприема высокоскоростной информации космической радиолинии». Патент РФ 116293, приоритет 20.12. 2011.
5. Радиоприемник цифровой информации. Описание изобретения к патенту №2371845, 30.06.2008, МПК H04B 1/06.
6. Устройство сдвига полосы частот. Описание изобретения, а.с. СССР №824401, 1979.
7. И.И. Калашников. Системы связи через искусственные спутники Земли. Издательство «Связь», 1969.
8. Грудинская Г.П. Распространение радиоволн. Москва «Высшая школа», 1975.
9. Трахтман A.M. Введение в обобщенную спектральную теорию сигналов. Москва «Советское радио», 1972.
10. Liu; Gang Kevin; (Simi Valley, CA); Buchler; Robert John; (Calabasas, CA); Bruner; Charles P.; (Calabasas, CA) «Оценка относительного положения между навигационными единицами», United States Patent Application 20080114544 May 15, 2008, Class at Publication 701/480.
11. Mizuochi; Shunichi; (Matsumoto-shi, JP); Matsumoto; Kazumi; (Shiojiri-shi, JP); Kumar; Anand; (Shiojiri-shi, JP) «Способ отслеживания сигнала спутника и приемник сигнала», United States Patent Application 20120038508 August 15, 2011, Class at Publication 342/357.23.







Малогабаритная свч-антенна на основе метаматериала
Электронное устройство оперативного восстановления измерений псевдодальности
Способ формирования навигационных радиосигналов навигационных космических аппаратов (нка) на геостационарной орбите (гсо) и/или навигационных космических аппаратов (нка) на геосинхронной наклонной орбите (гсно) с помощью земных станций и система для его реализации
Способ радиосвязи с землей постоянно действующей обитаемой базы на обратной (невидимой) стороне луны и система для осуществления данного способа
Способ обеспечения постоянной радиосвязи обитаемой базы на поверхности марса с землей и система для осуществления данного способа
Способ изготовления шунтирующего диода для солнечных батарей космических аппаратов
Устройство для приема дискретных сигналов
Активная пространственная передающая антенная решетка
Многодиапазонная антенна круговой поляризации с метаматериалом
Система для проведения испытаний на безотказность и электротермотренировки цифровых интегральных схем (ис) и сверхбольших интегральных схем (сбис)
Малогабаритная свч-антенна на основе метаматериала
Электронное устройство оперативного восстановления измерений псевдодальности
Способ формирования навигационных радиосигналов навигационных космических аппаратов (нка) на геостационарной орбите (гсо) и/или навигационных космических аппаратов (нка) на геосинхронной наклонной орбите (гсно) с помощью земных станций и система для его реализации
Способ радиосвязи с землей постоянно действующей обитаемой базы на обратной (невидимой) стороне луны и система для осуществления данного способа
Способ обеспечения постоянной радиосвязи обитаемой базы на поверхности марса с землей и система для осуществления данного способа
Способ изготовления шунтирующего диода для солнечных батарей космических аппаратов
Устройство для приема дискретных сигналов
Активная пространственная передающая антенная решетка
Многодиапазонная антенна круговой поляризации с метаматериалом
Система для проведения испытаний на безотказность и электротермотренировки цифровых интегральных схем (ис) и сверхбольших интегральных схем (сбис)

