Результат интеллектуальной деятельности: КРЕПЛЕНИЕ ДЛЯ ВЫПОЛНЕННОГО С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕНИЯ ДАТЧИКА
Вид РИД
Изобретение
Предлагаемое изобретение относится к креплению для выполненного с возможностью перемещения датчика, который выполнен с возможностью направления на цель, на несущей структуре. Датчики подобного типа могут быть, например, приемниками сигналов радиолокационной станции, фотодатчиками или, в общем, датчиками и/или приемниками электромагнитного излучения.
Тем самым обозначение "датчик" для выполненного с возможностью направления функционального элемента в контексте предлагаемого изобретения не ограничено приемными устройствами и также может включать в себя передающие устройства или комбинированные передающие/приемные устройства электромагнитного излучения.
Для возможности направления на цель датчиков подобного типа для датчика требуется выполненное с возможностью перемещения крепление.
Прежде всего, если сама несущая структура также выполнена с возможностью перемещения, например является составной частью воздушного судна, космического аппарата, водного транспортного средства или сухопутного транспортного средства, то данное крепление должно быть в состоянии вести датчик таким образом, чтобы он всегда оставался направленным на цель. Это касается и случаев, когда цель перемещается.
US 5,860,327, а также EP 0155922 А1 описывают подходящие для датчиков крепежные структуры, посредством которых датчики являются направляемыми на цель. Однако за счет взаимного размещения осей вращения наведение датчика на цель приводит к движению качания (биению), что делает ее малопригодной для использования во воздухоплавании.
Из US 4,575,039 известна структура, в которой все оси вращения пересекаются в одной точке вне датчика. Тем самым перемещение центра тяжести датчика происходит на поверхности шара (сферы), что делает структуру также малопригодной для использования во воздухоплавании.
Из US 4,318, 522 известна крепежная структура для спутника. Крепежная структура имеет три оси вращения, которые соответственно проходят под наклоном друг к другу и которые пересекаются с центром тяжести спутника. Помимо этого, крепление имеет приводимые в движение при помощи двигателя плечи рычагов.
Задачей предлагаемого изобретения является крепление выполненного с возможностью перемещения датчика, который выполнен с возможностью направления на цель, на несущей структуре, при этом крепление имеет компактную конструкцию, обеспечивает быстрое направление датчика на цель, и также позволяет быстрое наведение датчика при подвижной цели/или подвижной несущей структуре.
Данная задача решена посредством указанных в пункте 1 и пункте 5 формулы изобретения креплений. Крепление согласно п.1 формулы изобретения имеет три выполненные с возможностью вращения при помощи двигателя кольца для размещения датчика, при этом оси вращения трех выполненных с возможностью вращения при помощи двигателя колец расположены наклонно друг к другу. Крепление согласно п.5 формулы изобретения имеет два выполненные с возможностью вращения при помощи двигателя кольца для размещения датчика, при этом оси вращения двух выполненных с возможностью вращения при помощи двигателя колец расположены наклонно друг к другу.
Далее под "датчиком" понимается активный и/или пассивный датчик или же антенна.
Целесообразным образом, оси вращения опирающихся с возможностью вращения колец пересекаются в виртуальном центре вращения. Согласно первому предпочтительному варианту выполнения изобретения виртуальный центр вращения лежит вблизи геометрического центра тяжести датчика. Во втором предпочтительном варианте выполнения изобретения виртуальный центр вращения и геометрический центр тяжести датчика совпадают. Геометрический центр тяжести также может быть центром масс датчика.
В первом варианте изобретения первое установленное на подшипниках с возможностью вращения кольцо с базовой поверхностью и покровной поверхностью посредством соединенного с базовой поверхностью первого подшипника соединено с несущей структурой крепления. Второе установленное на подшипниках с возможностью вращения кольцо с базовой поверхностью и покровной поверхностью посредством соединенного с базовой поверхностью второго подшипника соединено с покровной поверхностью первого установленного на подшипниках с возможностью вращения кольца, и соединенный с покровной поверхностью третий подшипник соединен с третьим установленным на подшипниках с возможностью вращения кольцом, при этом нормаль к поверхности базовой поверхности установленного на подшипниках с возможностью вращения первого кольца и нормаль к поверхности базовой поверхности выполненного с возможностью вращения третьего кольца имеют угол ά1 от 0° до 90°.
Во втором варианте изобретения первое установленное на подшипниках с возможностью вращения кольцо с базовой поверхностью и покровной поверхностью посредством соединенного с базовой поверхностью первого подшипника соединено с несущей структурой крепления, а посредством соединенного с покровной поверхностью второго подшипника - со вторым установленным на подшипниках с возможностью вращения кольцом, при этом нормаль к поверхности базовой поверхности первого установленного на подшипниках с возможностью вращения кольца и нормаль к покровной плоскости второго установленного на подшипниках с возможностью вращения кольца имеют угол ά1 от 0° до 90°.
Далее изобретение подробнее описывается и разъясняется на основании чертежей. Показано на:
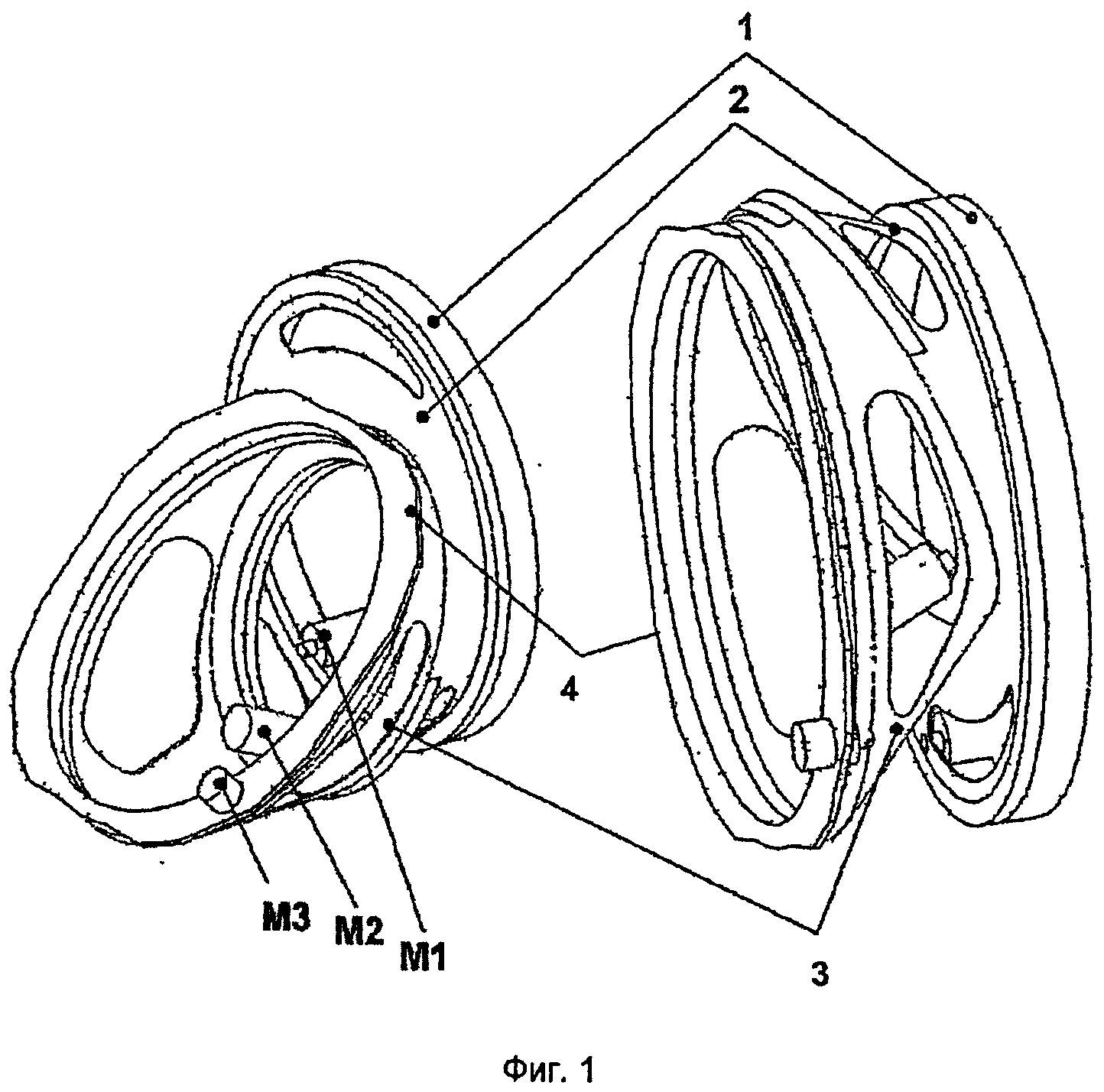
Фиг.1 первый вариант крепления согласно изобретению в двух положениях,
Фиг.2 первый вариант крепления согласно изобретению с направлением вверх,
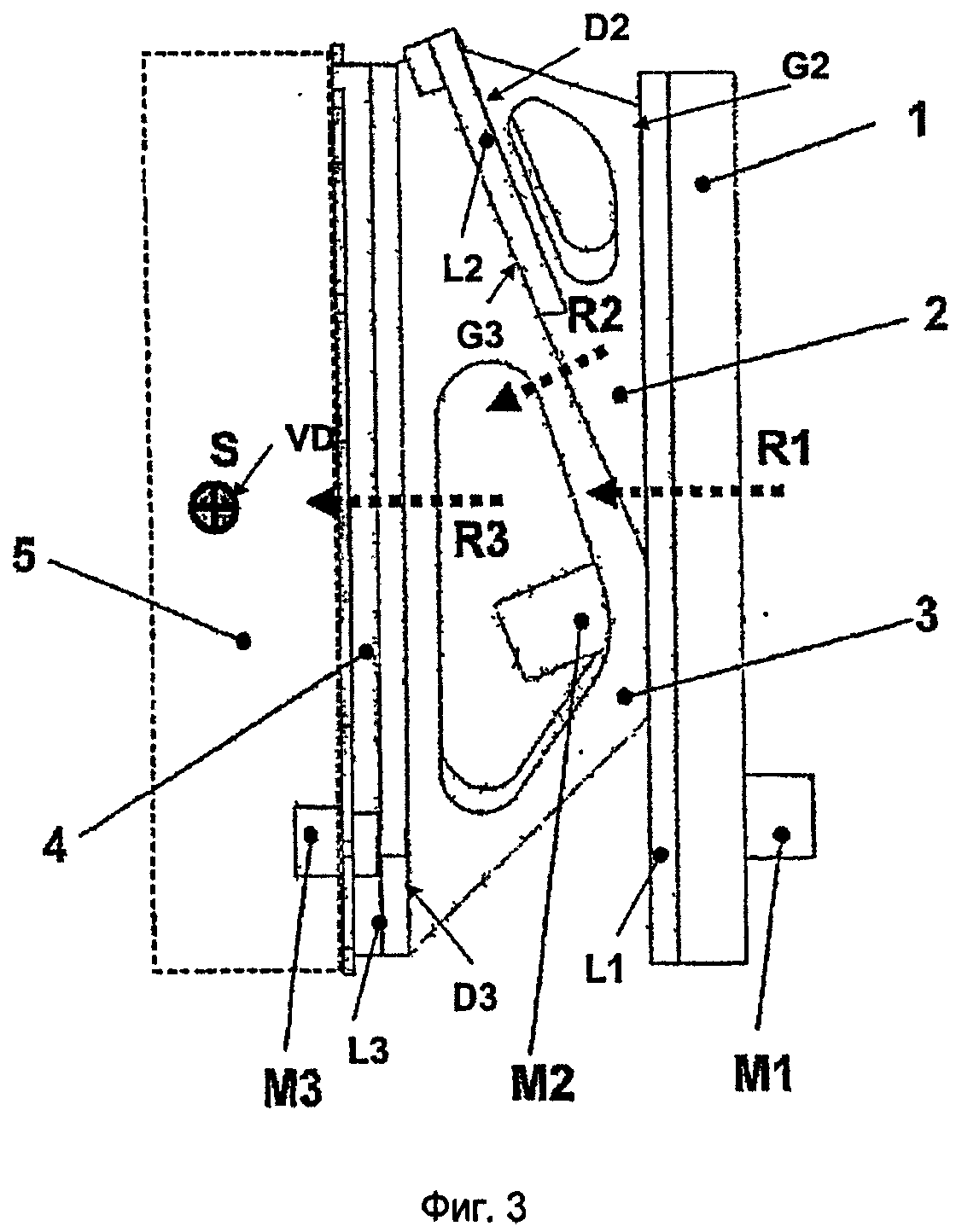
Фиг.3 первый вариант крепления согласно изобретению с направлением вперед,
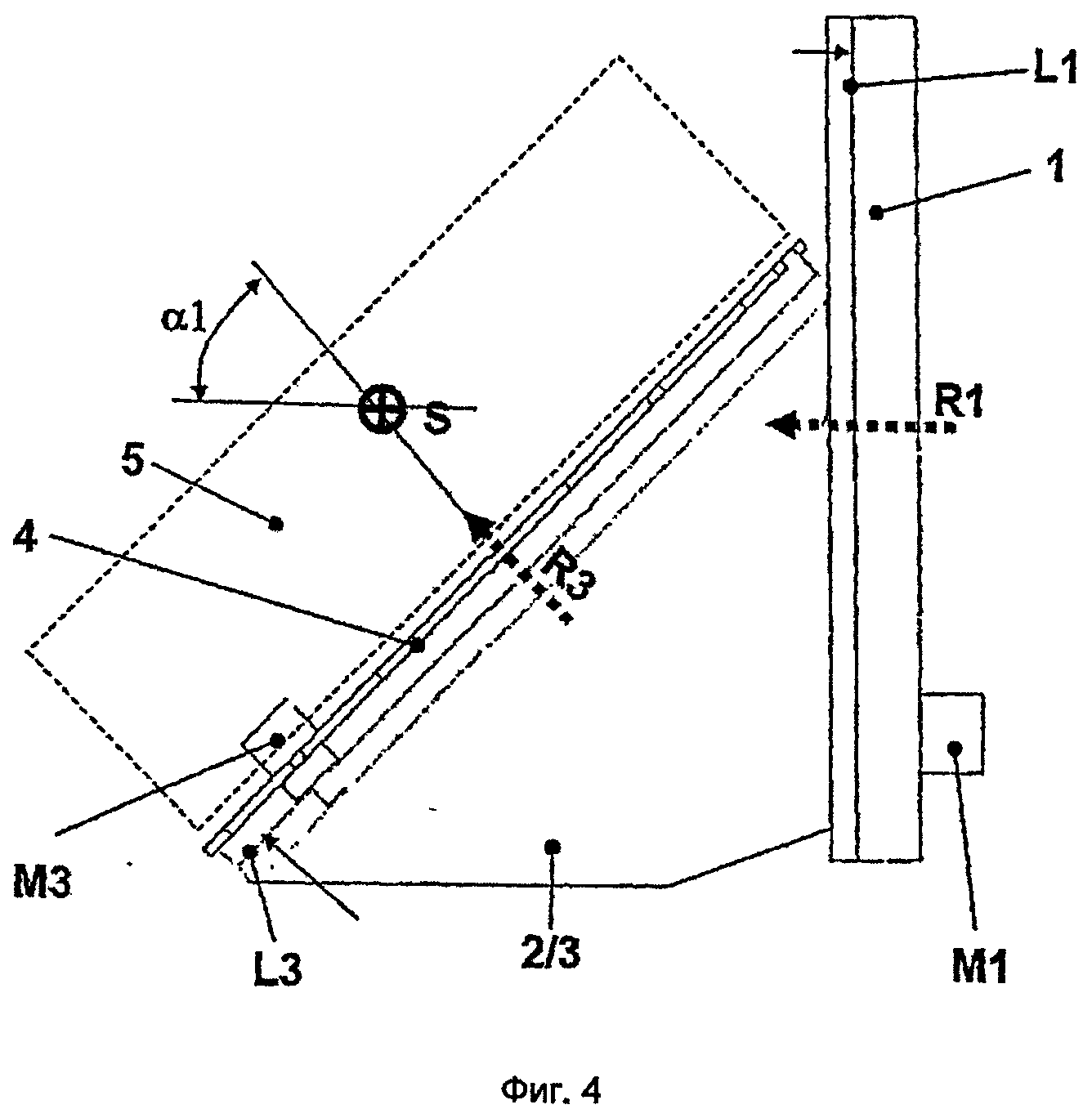
Фиг.4 второй вариант крепления согласно изобретению,
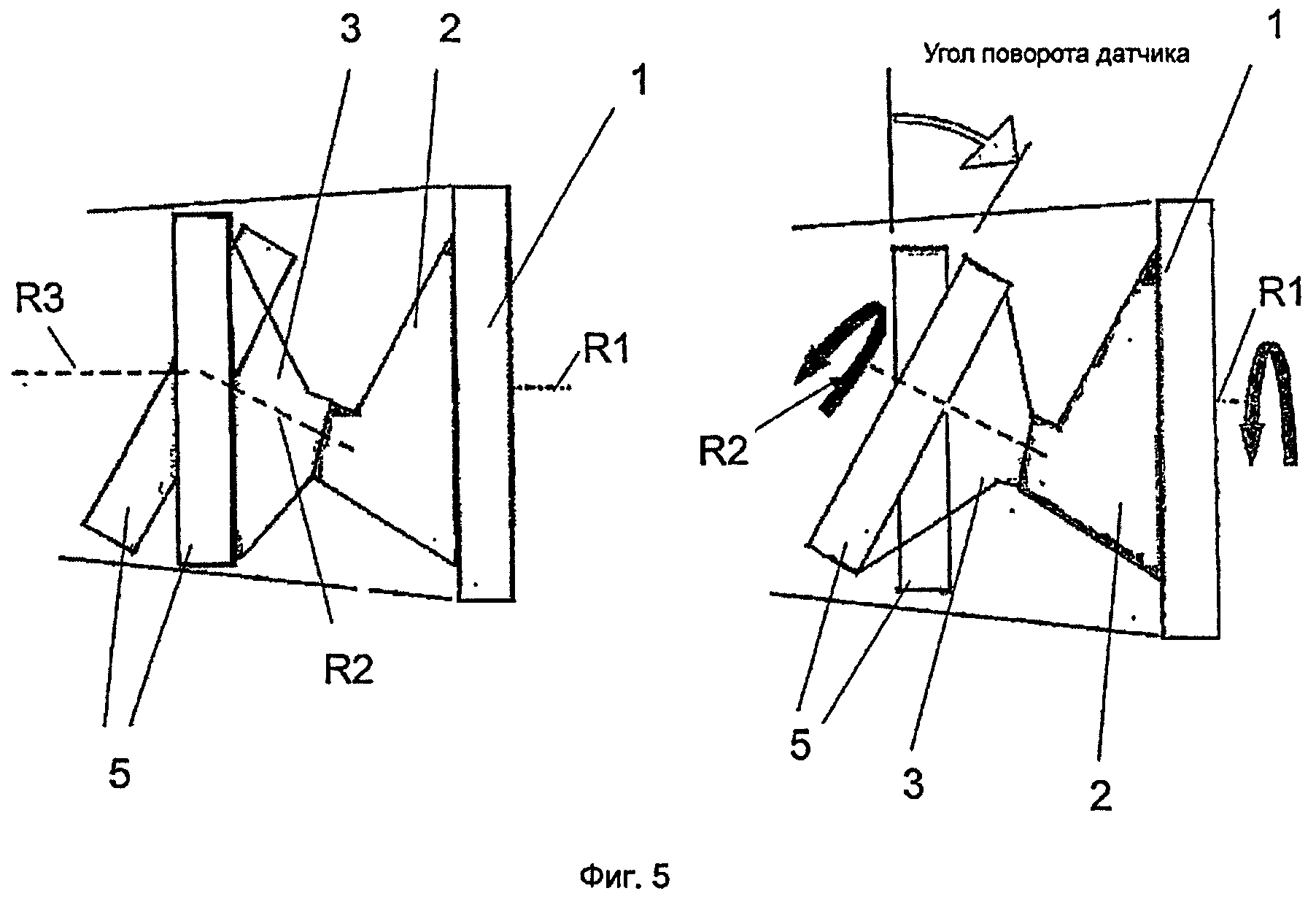
Фиг.5 схематичное изображение фиг.1 или же фиг.2 или же фиг.3,
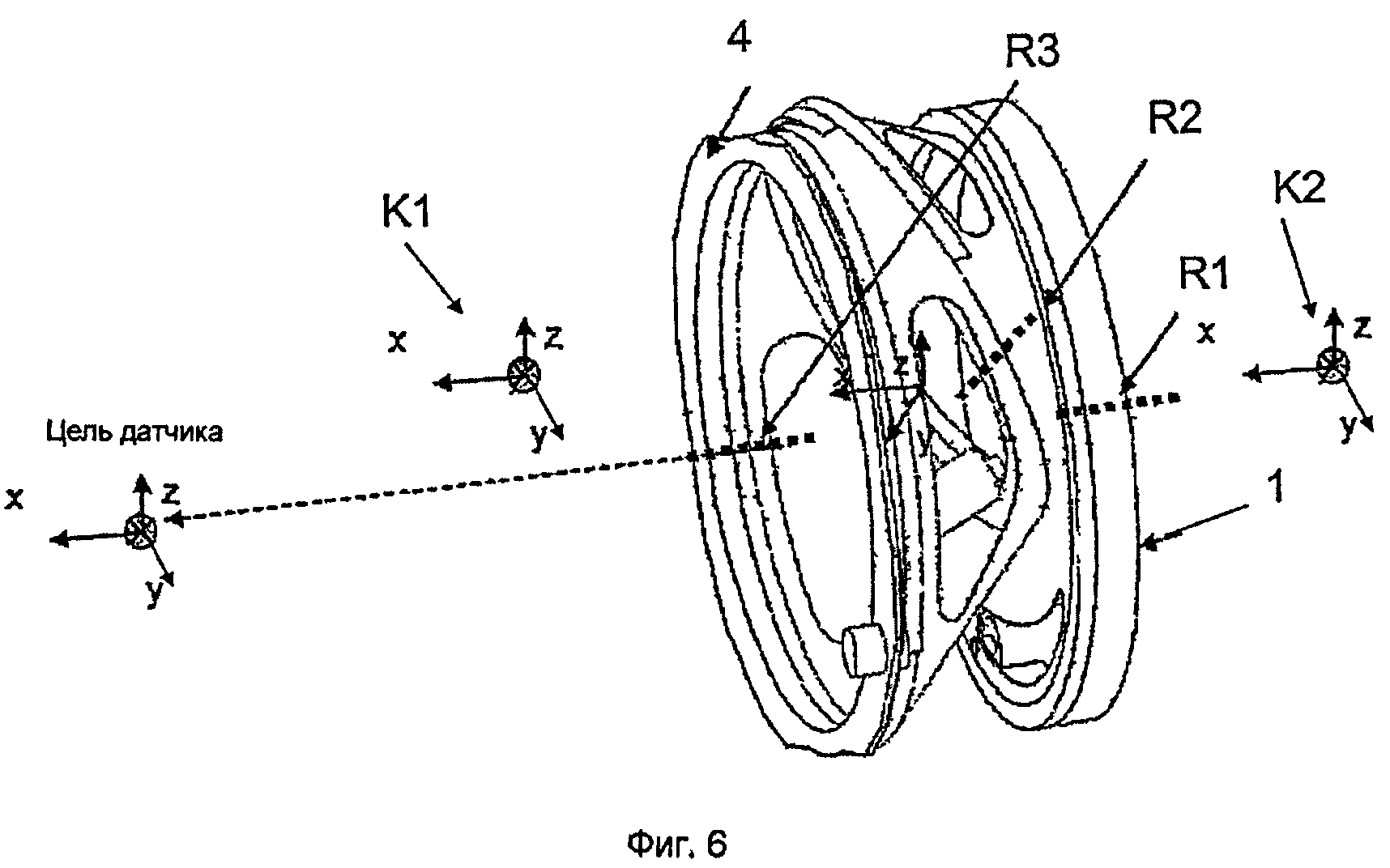
Фиг.6 крепление согласно изобретению относительно цели датчика.
Для направления датчика или же антенны согласно изобретению требуются два или три приводимые в движение с помощью двигателя кольца для того, чтобы в пределах определенного углового спектра всегда перпендикулярно направлять датчик на целевую точку.
На фиг.1 показано крепление с первым установленным на подшипниках с возможностью вращения кольцом 2, вторым установленным на подшипниках с возможностью вращения кольцом 3 и третьим установленным на подшипниках с возможностью вращения кольцом 4. Первое установленное на подшипниках с возможностью вращения кольцо 2 закреплено на несущей структуре 1 крепления. Второе установленное на подшипниках с возможностью вращения кольцо 3 расположено между третьим установленным на подшипниках с возможностью вращения кольцом 4 и первым установленным на подшипниках с возможностью вращения кольцом 2. На третьем установленном на подшипниках с возможностью вращения кольце 4 закреплен датчик (не показан). На установленных на подшипниках с возможностью вращения кольцах 2, 3, 4 дополнительно закреплены двигатели М2, М3, М4 для приведения в движение колец 2, 3, 4.
Третье установленное на подшипниках с возможностью вращения кольцо 4, которое соединено с датчиком, предназначено для компенсации крена. Подобное непроворачивание антенны относительно определенной плоскости также может происходит механически, например посредством закрепленного на несущей структуре 1 карданного шарнира (не показан).
Первое установленное на подшипниках с возможностью вращения кольцо 2 также называется отклоняющим конусом, установленное на подшипниках с возможностью вращения второе кольцо 3 - конусом вращения, а установленное на подшипниках с возможностью вращения третье кольцо 4 - поляризационным конусом.
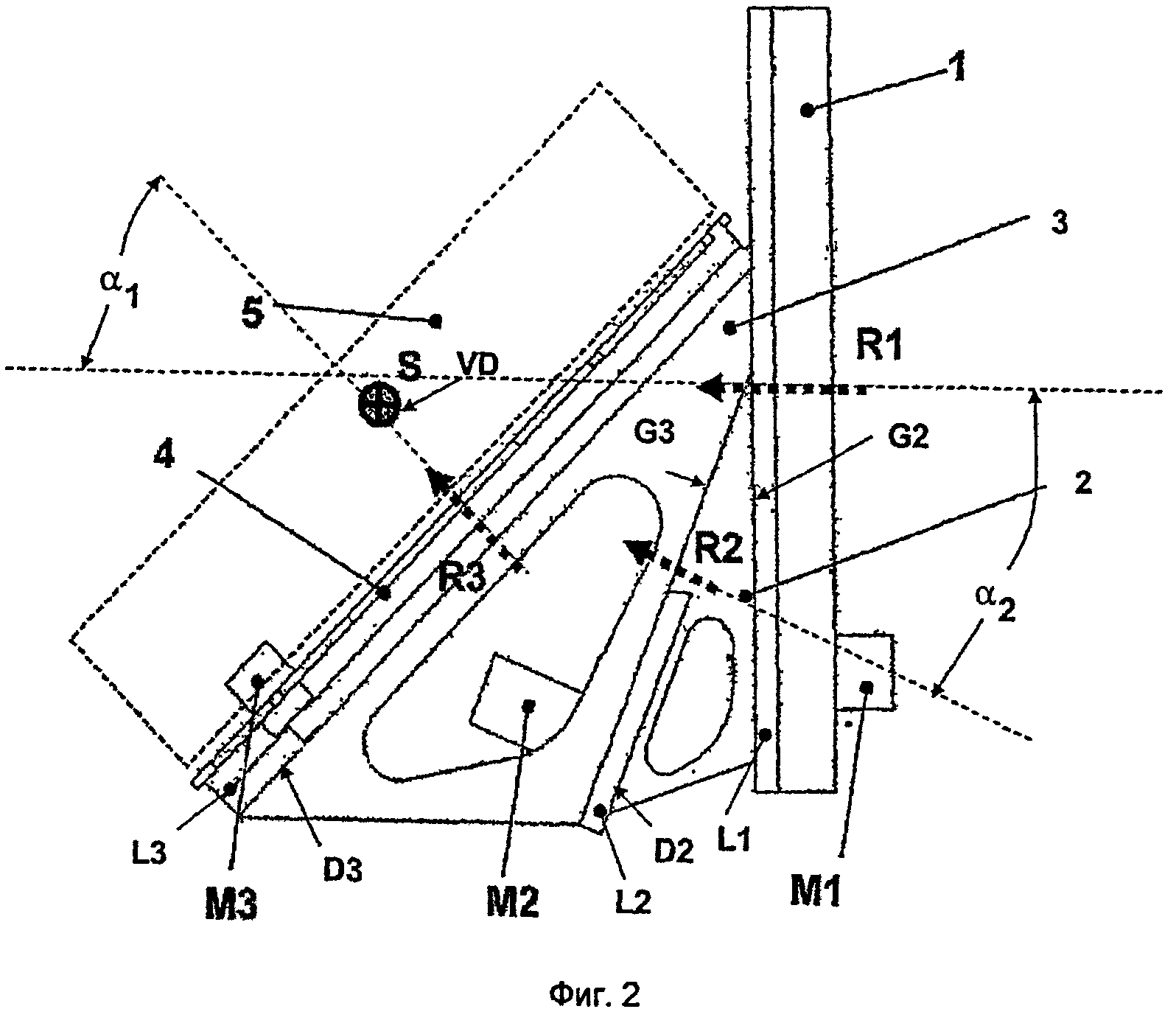
На фиг.2 показан первый вариант крепления согласно изобретению с первым направлением вверх. Для обеспечения возможности направления датчика в некоторой зоне видимости в заданном направлении без превышения объема свободного перемещения, оси R1, R2, R3 вращения установленных на подшипниках с возможностью вращения друг относительно друга колец 2, 3, 4 расположены наклонно в пространстве так, что эти оси R1, R2, R3 вращения пересекаются в виртуальном центре VD вращения. Этот виртуальный центр VD вращения совпадает с геометрическим S центром тяжести датчика 5. В одной конструктивной форме изобретения виртуальный центр VD вращения также может находится в предварительно задаваемой окружности вокруг геометрического S центра тяжести датчика 5. Посредством такого расположения осей R1, R2, R3 могут быть реализованы требуемые углы датчика.
Первое установленное на подшипниках с возможностью вращения кольцо 2 имеет базовую поверхность G2 и покровную поверхность D2. На базовой поверхности G2 закреплен первый подшипник L1, который соединен с несущей структурой 1 крепления. Второе установленное на подшипниках с возможностью вращения кольцо 3 имеет базовую поверхность G3 и покровную поверхность D3. Посредством соединенного с базовой поверхностью G3 второго подшипника L2 второе кольцо 3 соединено с покровной поверхностью D2 первого установленного на подшипниках с возможностью вращения кольца 2. Посредством соединенного с покровной поверхностью D3 третьего подшипника L3 второе кольцо 3 соединено с третьим установленным на подшипниках с возможностью вращения кольцом 4. Нормаль R1 к поверхности базовой поверхности G2 первого установленного на подшипниках с возможностью вращения кольца 2 и нормаль R3 к поверхности покровной поверхности D3 второго установленного на подшипниках с возможностью вращения кольца 3 составляет угол ά1. Угол ά1 может находится в диапазоне от 0° до 90°.
Нормаль R1 к поверхности базовой поверхности G2 первого установленного на подшипниках с возможностью вращения кольца 2 и нормаль R2 к поверхности базовой поверхности G3 второго установленного на подшипниках с возможностью вращения кольца 3 составляет угол U2. Этот угол составляет 0°-90°.
Крепление имеет двигатели M1, M2, М3. Эти двигатели M1, M2, М3 соединены с соответственно установленными с возможностью вращения кольцами 2, 3, 4 для приведения в движение в движение подшипников L1, L2, L3. Моторные приводы M1, M2, М3 приводят в движение соответствующие установленные на подшипниках с возможностью вращения кольца 2, 3, 4 посредством ведущей малой шестерни (не показано) через зубчатый венец (не показано).
Нормали R1, R2, R3 к поверхности образуют оси вращения соответствующих подшипников L1, L2, L3. Из-за соединений подшипников L1, L2, L3 с выполненными с возможностью вращения кольцами 2, 3, 4 нормали R1, R2, R3 к поверхности одновременно образуют оси вращения колец 2, 3, 4.
На фиг.3 показан первый вариант крепления согласно изобретению со вторым направлением вперед. Соответствующие ссылочные обозначения на фиг.2 также действуют и для фиг.3. На изображениях на фиг.3 оси R1 и R3 вращения лежат на общей прямой.
Если требуется компенсация крена, то есть ось датчика 5 всегда параллельна одной плоскости (например, горизонтали), то это происходит с помощью третьего установленного на подшипниках с возможностью вращения кольца 3, на котором закреплен датчик 5. Это кольцо 3 также называется поляризационным кольцом.
На фиг.4 показано по второй вариант крепления согласно изобретению. Соответствующие ссылочные обозначения на фиг.2 или же фиг.3 также действуют и для фиг.4. На фиг.4 установленные на подшипниках с возможностью вращения кольца 2 и 3 объединены в общее кольцо 2/3. Соединение установленного на подшипниках с возможностью вращения кольца 2/3 происходит согласно разъяснениям к фиг.2.
Оси R1 и R2 вращения пересекаются в виртуальном центре VD вращения, который, предпочтительно, совпадает с геометрическим центром тяжести S датчика 5.
Подобные крепления датчиков имеют легкую конструкции. Подобные крепления датчиков устойчивы к изгибу и скручиванию всех питающих линий, например кабелей для передачи данных, кабелей электропитания и трубопроводов охлаждающей жидкости (не показано).
В креплениях датчика подобного типа речь идет о простых вращательных движениях, опоры и приводы которых могут быть выполнены просто и надежно и могут быть защищенно интегрированы во внутреннюю полость воронки.
В основном, приводы M1, M2, М3 воспринимают только силы инерции вращения датчика 5.
Основные нагрузки, которые возникают из-за действующих извне сил ускорения (например, центробежные силы самолета), передаются в основном от раструбов и их опор. Никаких дополнительных крутящих моментов, которые должны компенсировать приводы, не возникает.
Эта кинематика обеспечивает оптимальное наведение датчика 5 (например, антенны радара) в пространственно очень ограниченном пространстве, например в носовом обтекателе самолета. Возможность отклонения вокруг пространственных осей R1 и R2 допускает поворот датчика 5 в любом направлении в пределах заданного соответствующей конструкцией диапазона поворота (фиг.2 и фиг.3).
Соответственно и наведение датчика 5 может непрерывно происходить в любом из этих направлений. В зависимости от конструкции, путем применения направляющих поверхностей при вращении может выполняться постоянное вращение. Если направляющие поверхностей при вращении не предусмотрены, то может выполняться лишь частично постоянное вращение.
Предпочтительно, предусмотрено устройство управления для управления соответствующим поворотными приводами для того, чтобы гармонизировать угол поворота отдельных вращающихся воронок или же колец крепления датчика и, тем самым, управлять движением поворота датчика 5.
Устройство управления должно гармонизировать 3 положения вращения в варианте 1 (фиг.2 и фиг.3), если должна быть реализована моторная компенсация поляризации. Если такая компенсация поляризации отсутствует, или же она достигается механически, то устройство управления должно гармонизировать только 2 вращательных движения.
Устройство управления в варианте 2 (фиг.4) должно гармонизировать 2 положения вращения, если должна быть реализована моторная компенсация поляризации.
Кинематика подобного типа при легкой и компактной конструкции обеспечивает непрерывное наведение датчика во всех направлениях при оптимальном приложении сил и малых вращаемых массах. При постоянно изменяемых координатах самой цели и движущейся несущей структуре, например в летящем самолете или движущемся судне или же сухопутном транспортном средстве, кинематика соответствующего изобретению крепления позволяет вести датчик, например антенну радара, непрерывно в пределах конструктивно заданного диапазона поворота (фиг.5).
С помощью такого крепления для датчика, который выполнен в виде антенны радара или имеет антенну радара, возможно не только вести датчик, но и кроме того поддерживать постоянное направление плоскости поляризации антенны относительно цели. Естественно, это также касается и других типов датчиков, которые, предпочтительно, должны удерживаться в постоянном направления на цель, что, например, также относится и к выдающим изображение датчикам в диапазоне длины волны видимого света или других диапазонах длины волны.
Если крепление подобного типа используется, например, в самолете, то в соответствии с преимущественным усовершенствованием могут компенсироваться как движения самолета вокруг оси тангажа (поперечной оси) и вокруг оси рыскания (вертикальной оси), так и движения самолета вокруг его оси крена (продольной оси). Соответствующим образом также могут компенсироваться движения цели датчика, (фиг.6). Датчик имеет возможность одновременно вращаться вокруг всех осей центральной точки вращения. Основная часть сил инерции датчика через вращающиеся кольца отводится в структуру летательного аппарата.
Крепление обеспечивает постоянную возможность наведения датчика при одновременной компенсации вращающейся в пространстве базовой структуры, которая смонтирована, например, на летательном аппарате.
Ось у поляризационного кольца 4 (или же датчика 5) остается параллельной относительно плоскости ху первого кольца 2 или же летательного аппарата (фиг.6). На фиг.6 с помощью К1 обозначена система координат поляризационного кольца 4 или же датчика 5. С помощью К2 обозначена система координат несущей структуры 1 или содержащего несущую структуру 1 летательного аппарата.
Преимущественным образом, датчик имеет передающую и/или приемную антенну. В особо предпочтительной конструктивной форме изобретения датчик выполнен как радарный датчик и имеет, например, антенну радара. Однако изобретение не ограничено радарным датчиком, а крепление согласно изобретению также пригодно для других датчиков, например для выдающих изображение датчиков или других типов антенн или, например, также для эхолота. При этом изобретение не ограничено тем, что датчик имеет или представляет приемник или антенну от него, а он является выполненным с возможностью направления функциональным элементом, который в соответствии с определением понятия "датчик" в данной заявке может быть выполнен передающим устройством или его антенной или может иметь их, или может представлять собой комбинацию из передающего и приемного устройства или относящихся к ним антенн. В качестве передающего устройства в этом смысле следует понимать, например, излучатель энергии (например, лазерный излучатель) лучевого оружия.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
|
Сенсорное устройство
Способ определения географических координат точек изображения на sar изображениях
Способ основанного на энтропии определения кривых края объекта
Способ распознавания объектов
Способ идентификации и классификации объекта
Приспособление для формования заготовки
Способ предварительной формовки текстильного полуфабриката и устройство предварительной формовки
Способ борьбы с подвижной целью (варианты)
Сбрасывающее устройство для бортового самописца
Ветросиловой ротор и способ выработки энергии с его помощью
Сенсорное устройство
Способ определения географических координат точек изображения на sar изображениях
Способ основанного на энтропии определения кривых края объекта
Способ распознавания объектов
Способ идентификации и классификации объекта
Приспособление для формования заготовки
Способ предварительной формовки текстильного полуфабриката и устройство предварительной формовки
Способ борьбы с подвижной целью (варианты)
Сбрасывающее устройство для бортового самописца
Ветросиловой ротор и способ выработки энергии с его помощью

