Результат интеллектуальной деятельности: СИСТЕМА БИОМЕХАНИЧЕСКОГО КОНТРОЛЯ ДЕЯТЕЛЬНОСТИ ЛЁТЧИКА В ПОЛЁТЕ
Вид РИД
Изобретение
Изобретение относится к авиационной технике, в частности к средствам контроля параметров «человеческого фактора», и предназначено для использования на борту летательных аппаратов различного типа в составе штатного снаряжения летчика при проведении эргономической оценки и оптимизации оборудования кабины, при расследовании авиационных происшествий, а также в тренировочных полетах.
Адекватным подходом к биомеханическим измерениям в условиях полета с точки зрения удобства и безопасности эксплуатации является технологическое направление «носимой электроники» - миниатюрных измерительных и информационных устройств, встроенных в одежду.
Известно устройство, реализованное в виде перчатки, использующее датчики инерционного типа (акселерометры) для распознавания жестов (Micha Vardi I.С., Technologies Ltd, Apparatus and methods for hand motion tracking and handwriting recognition. Патент US 6831632, 2004). Основным недостатком устройства является отсутствие точной локализации движений в рабочей среде. Линейные ускорения, измеряемые акселерометрами, есть вторая производная от положения тела, угловая скорость, измеряемая гироскопами, - это первая производная от пространственного положения (ориентации) в пространстве. Соответственно, траектория движения тела и текущая его ориентация в пространстве получаются путем интегрирования соответствующих показаний акселерометров и гироскопов. Основным недостатком инерциальных методов является накопление ошибки интегрирования со временем. Кроме того, в условиях полета для повышения точности определения кинематических характеристик движений летчика в кабине маневрирующего самолета нужна дополнительная система референтных инерциальных датчиков, отслеживающих движения самого летательного аппарата.
Известны гониометрические средства контроля над движениями спортсменов (Полещук Н.К. Основы гониометрической практики, г.Петрозаводск, 2004), предметом анализа в которых является взаимное расположение частей тела, например, оценка изменения суставных углов руки. По результатам гониометрических измерений возможно восстановить траекторию движения руки. Преимущество гониометрического способа, реализованного в виде резистивных, потенциометрических, оптоволоконных датчиков, состоит в независимости соответствующих результатов измерений от ускорений и перегрузок, связанных с эволюциями летательного аппарата. Основной недостаток гониометрических измерений состоит в том, что они не направлены на точную локализацию движения спортсмена в инерциальной системе координат, что делает их применение недостаточным для анализа действий летчика с органами управления. Погрешность определения действий летчика с органами управления зависит от погрешности измерения углов (от 1 мм на 0.5 градуса погрешности потенциометрического датчика), а также от неполноты отражения составляющих движений частей тела в кинематической схеме расположения датчиков. При использовании только гониометрических датчиков особую трудность составляет определение вращательных и нажимных действий с органами управления.
Известны гибридные системы слежения за движениями, объединяющие электромагнитные и оптические датчики, предназначенные для систем Виртуальной реальности, которые взаимно компенсируют недостатки электромагнитных и оптических технологий измерения перемещения и ориентации тела в пространстве (Hansen, Per Krogh, Burlington, VT. Ascension, Hybrid motion tracker, патент США №5831260, 1998). Наиболее точные оптические способы (видеокамеры, фотоэлементы, инфракрасные устройства) чувствительны к световому фону (затемнениям, засветке), а также требуют отсутствия предметов на линии измерения. Электромагнитные способы обладают меньшей, но достаточной точностью локализации предметов в пространстве (1-2 мм), не чувствительны к препятствиям на линии измерений, но подвержены влияниям со стороны электромагнитных помех; кроме того, надежность измерений понижается с удалением от излучателя электромагнитного поля. Применение данных технологий Виртуальной реальности в авиационной сфере на примере контроля деятельности авиатехников (авиабаза Райт-Паттерсон, США) выявило проблемы точности локализации действий в пространстве (ограниченный радиус действия устройств). Основной недостаток данных оптико-электромагнитных гибридных систем с точки зрения их применимости в полете проблемы электромагнитной совместимости, освещенности и двухкомпонентный способ измерений - наличие излучателя (электромагнитного, инфракрасного, светового) и датчика - приемника излучения.
В качестве ближайшего аналога выбрана полезная модель №119454 от 28.03.2012 «Устройство нашлемной системы целеуказания и индикации», содержащее наногироскопы и радиоинтерфейсы для передачи данных на индикатор на лобовом стекле (ИЛС). Устройство решает задачу отслеживания угла поворота головы оператора, соотносящегося с линией визирования цели. Основным недостатком полезной модели является то, что она не позволяет определять движения других частей тела, кроме головы, помимо этого, увеличение погрешностей оценки величины сложных движений тела оператора из-за использования одного типа датчиков.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является:
1) повышение точности определения всех видов движений конечностей летчика (поступательных, вращательных, нажимных) в условиях полета высокоманевренного самолета, а также точности локализации в пространстве кабины для определения действий с конкретными органами управления за счет использования разнотипных датчиков;
2) компактность и автономность средств измерения и регистрации, построенных на принципах «носимой электроники»,обеспечивающая свободу движений летчика и не требующая дооборудования кабины;
3) возможность настройки системы на конкретный самолет и конкретного летчика.
Указанный технический результат достигается тем, что в системе биомеханического контроля деятельности летчика в полете, содержащей чувствительные преобразователи, установленные на снаряжении летчика, связанные со встроенным вычислителем, в летном комбинезоне установлены датчики инерционного типа (акселерометры и гироскопы) и гониометрические датчики механического типа для определения движений верхних и нижних конечностей летчика, в перчатках установлены датчики инерционного типа для определения движения и ориентации (углового положения) рук, тензометрические датчики для определения сгиба пальцев, сжатия ладони, поворота кисти, пьезокристаллические датчики в кончиках пальцев для определения нажатия на поверхность, в носках установлены тензодатчики и пьезокристаллические датчики для определения движения стопы и силы нажатия на педали, в поясе установлены акселерометры и гироскопы для определения движения тела летчика вместе с движением самолета при маневрировании, в снаряжении летчика установлен встроенный вычислитель для компенсации погрешностей интегрирования акселерометров и погрешностей измерений грубых механических датчиков.
Описание чертежей.
На фиг.1 представлена система биомеханического контроля деятельности летчика в полете.
Система содержит:
летный комбинезон 1, в котором установлены: группа акселерометров и гироскопов на манжетах 7, группа гониометрических датчиков (рукава и плечо) 8, встроенный вычислитель (на туловище) 6; перчатки 2, в которых установлены: группа акселерометров и гироскопов (на тыльной части кисти) 9, тензометрические и пьезокристаллические датчики (на ладони и пальцах) 10; пояс 3 с группой референтных акселерометров и гироскопов 11; носки 4 с группой тензометрических и пьезокристаллических датчиков 12.
Система работает следующим образом:
1. Летчик облачается в штатное снаряжение летчика: комбинезон 1, носки 4, перчатки 2, пояс 3.
2. Перед полетами производится разметка кабины 5 самолета с участием летчика для определения всех органов управления кабины в системе координат 13, связанных с телом летчика, работающего в кабине, с исходной точкой отсчета - рычагом управления самолетом РУС и формирования индивидуальных баз данных (БД) по моторному полю кабины 5 для конкретного летчика, которая сохраняется в памяти вычислителя 6.
3. Непосредственно перед полетом летчик надевает комбинезон 1, носки 4, перчатки 2, пояс 3.
4. После посадки летчика в кабину самолета производится начальная калибровка блока гониометрических датчиков, когда отмечаются: «точка отсчета» (положение рук на рычаге управления), положение основных органов управления, а также периодические автоматические калибровки. Автоматические калибровки системы гониометрических датчиков производятся на основе сопоставления вычисленной ориентации в пространстве акселерометра на запястье, связанного с системой гониометрических датчиков, и ориентации в пространстве того же акселерометра относительно референтного акселерометра, расположенного на поясе. Условия выполнения автоматической калибровки:
1) Периоды отсутствия интенсивных рабочих движений рук.
2) Нахождение рук в области расположения РУС и РУД, включая окружность, ограничивающую ход РУС, и прямоугольник, ограничивающий ход РУД, в которых учтена погрешность гониометрических измерений.
3) Факт механического контакта руки с поверхностью соответствующего органа управления, фиксируемый тензометрическим датчиком на ладони.
5. В полете гониометрические датчики 8 на плечевых и локтевых суставах измеряют взаимное расположение частей тела. Инерционные датчики 7 на манжетах измеряют: акселерометры - ускорение соответствующих точек на конечностях, гироскопы - ориентацию (угловое положение) конечностей. Акселерометр и гироскоп 9 на тыльной части кисти в перчатке измеряют перегрузки и изменение углового положения кисти руки. Тензометрические датчики 10 в перчатке измеряют величину сгиба пальцев, сжатия ладони и поворота кисти (вверх-вниз и направо-налево). Пьезокристаллические датчики 10 на подушечках пальцев в кончиках перчаток измеряют силу нажатия на поверхность. Тензометрические датчики в носке измеряют величину сгиба ступни (на себя - от себя) и силу нажатия ноги на педали. Референтные инерционные датчики 11 (акселерометр и гироскоп) на поясе измеряют перегрузки и угловые скорости, воздействующие на человека при маневрировании летального аппарата.
6. В встроенном вычислителе 6 производится взаимная коррекция результатов измерения разнотипных датчиков: во-первых, сопоставляются показания акселерометров и гироскопов между собой по параметру ориентации датчиков в пространстве; во-вторых, сопоставляются показания инерционных датчиков на подвижной части руки и инерционных датчиков на поясе для учета влияния перегрузок и ускорений, создаваемых при маневрировании ЛА, на фоне которого летчиком совершаются рабочие движения; в-третьих, сопоставляются результаты измерения и определения суммы углов, получаемых с помощью системы гониометрических датчиков на конечностях, с углами между акселерометром, расположенным на запястье, и референтным акселерометром, расположенным на поясе. Данный подход способен на порядок повысить точность оценки углов; в-четвертых, сопоставляются показания акселерометров на кисти (в перчатке) и на запястье (в манжете). При отсутствии расхождения между показаниями этих двух датчиков положение центральной точки кисти и кончиков пальцев («рабочие точки») экстраполируется прибавлением соответствующих линейных величин, известных из индивидуальных антропометрических промеров. При расхождении соответствующих показаний датчиков считается, что действие совершается с участием движения кисти, в том числе и только за счет движения кисти при неизменном положении запястья.
7. После полета из вычислителя 6 вынимается съемный блок памяти для последующего анализа действий летчика с органами управления в кабине самолета в целях контроля процесса подготовки, при расследовании авиационных происшествий и эргономической оценке авиационных комплексов.
Предлагаемая система биомеханического контроля деятельности летчика может использоваться в перспективной системе управления безопасностью полетов.
Система биомеханического контроля деятельности летчика в полете, содержащая чувствительные преобразователи, установленные на снаряжении летчика, связанные со встроенным вычислителем, отличающаяся тем, что в летном комбинезоне установлены датчики инерционного типа (акселерометры и гироскопы) и гониометрические датчики механического типа для определения движений верхних и нижних конечностей летчика, в перчатках установлены датчики инерционного типа для определения движения и ориентации (углового положения) рук, тензометрические датчики для определения сгиба пальцев, сжатия ладони, поворота кисти, пьезокристаллические датчики в кончиках пальцев для определения нажатия на поверхность, в носках установлены тензодатчики и пьезокристаллические датчики для определения движения стопы и силы нажатия на педали, в поясе установлены акселерометры и гироскопы для определения движения тела летчика вместе с движением самолета при маневрировании, в снаряжении летчика установлен встроенный вычислитель для компенсации погрешностей интегрирования акселерометров и погрешностей измерений грубых механических датчиков.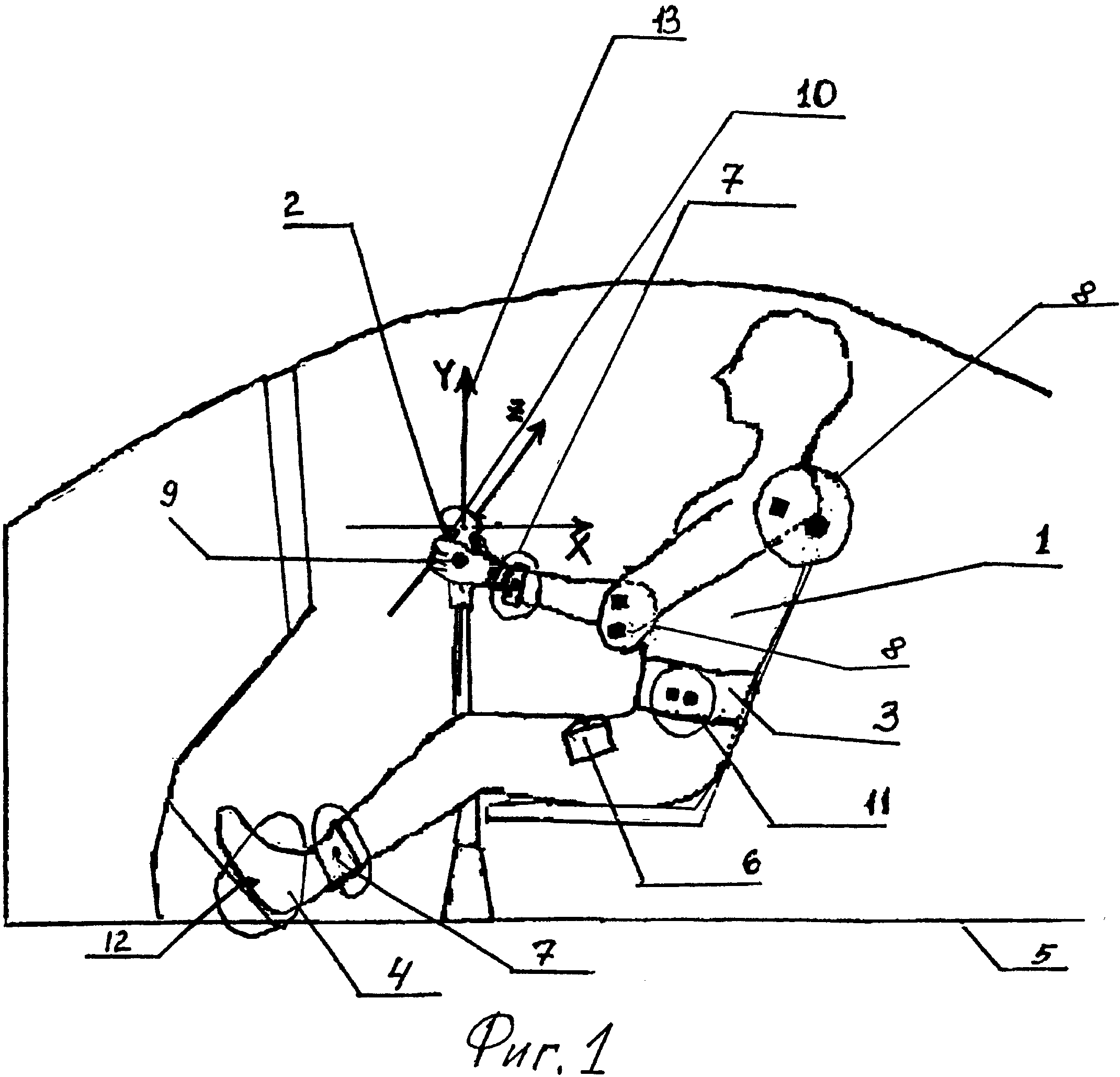
Способ испытаний систем, содержащих электровзрывные устройства, на стойкость к воздействию внешних электромагнитных полей в составе объектов и устройство для его осуществления
Пирорезак для перерубания троса при сбросе груза с летательного аппарата
Способ испытаний систем, содержащих электровзрывные устройства, на стойкость к воздействию внешних электромагнитных полей в составе объектов и устройство для его осуществления
Пирорезак для перерубания троса при сбросе груза с летательного аппарата
Летающая лаборатория с реконфигурируемым рабочим местом лётчика-испытателя для опережающих лётных исследований взаимодействия "экипаж-автоматика" и экипаж - бпла"

