Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области разработки систем наведения управляемых ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке систем управления, является увеличение точности наведения ракеты на цель, что, в свою очередь, связано с качеством работы привода ее рулей, т.е. с точностью отработки приводом входного сигнала.
Известны способы управления ракетой, в которых применяется охват привода руля отрицательной обратной связью, в результате чего привод функционирует в автоколебательном режиме, например в известном способе /Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975, с. 615/. При таких способах управления отклонение руля представляет собой совокупность двух составляющих: низкочастотной, пропорциональной управляющему сигналу, и высокочастотной автоколебательной составляющей, образующейся в системе замкнутого привода (амплитуда и частота автоколебательной составляющей зависит от параметров элементов системы).
Недостатком способов с автоколебательным режимом работы привода рулей является то, что в процессе полета ракеты амплитуда автоколебательной составляющей может существенно меняться и, в частности, достигать значений, близких к максимальным (положения рулей на упорах). Увеличение амплитуды автоколебаний аэродинамических рулей повышает индуктивную составляющую аэродинамического сопротивления ракеты, а при достижении упоров происходит уменьшение коэффициента передачи привода по полезной гармонике, что может приводить к недопустимому ухудшению качества процесса наведения.
Известен способ управления автоколебательной системой, включающий организацию режима вынужденных колебаний ее выходной координаты за счет формирования и введения в прямой тракт управления системы внешних высокочастотных периодических колебаний /Под редакцией Солодовникова В.В. Теория автоматического регулирования, книга 3, часть 2. - М.: Машиностроение, 1969, с. 9-10, 51-52/.
В таком способе за счет внешних высокочастотных периодических колебаний (частотой выше частоты автоколебаний) происходит подавление автоколебательного режима системы и устанавливается режим вынужденных периодических колебаний с частотой внешнего воздействия. Такой режим работы получил название вибрационной линеаризации или синхронного режима.
Наиболее близким к предлагаемому способу, принятым в качестве прототипа, является способ управления летательным аппаратом (ЛА)/патент RU №2435131, МПК F42B 15/01 (2006.01)/, включающий формирование системой управления ЛА управляющего сигнала автоколебательным приводом аэродинамических рулей, вибрационную линеаризацию этого сигнала путем его суммирования с внешним линеаризующим сигналом и соответствующее отклонение приводом аэродинамических рулей.
Система управления ЛА /патент RU №2435131, МПК F42B 15/01 (2006.01)/, реализующая данный способ, включает аппаратуру управления (АУ) ЛА, содержащую последовательно соединенные устройство измерения рассогласования (УИР) ЛА с заданной линией наведения и устройство формирования (УФ) сигналов управления, автоколебательный привод аэродинамических рулей (ПАР), содержащий последовательно соединенные суммирующий усилитель (СУ), первый вход которого подключен к выходу АУ ЛА, усилитель мощности (УМ), релейный элемент (РЭ), рулевую машинку (РМ) и датчик отклонения рулей (ДОР), выход которого соединен со вторым входом СУ, а также последовательно соединенные генератор линеаризующих колебаний (ГЛК) и блок умножения, выход которого соединен с третьим входом СУ, и устройство задания программного коэффициента изменения амплитуды линеаризующего сигнала, выход которого соединен со вторым входом блока умножения.
Известный способ управления основан на том, что введение внешних высокочастотных колебаний на вход привода приводит к нарушению условия существования автоколебаний в его контуре. При этом происходит захват внешних периодических колебаний и в системе устанавливается режим вынужденных колебаний. В результате вибрационной линеаризации угол отклонения рулей содержит наряду с составляющей, определяемой отработкой управляющего сигнала, составляющую вынужденных колебаний на частоте внешнего периодического воздействия, амплитуда которой меньше амплитуды автоколебаний.
Согласно известному способу и реализующему его устройству угол отклонения рулей δ для идеального ПАР имеет вид:
δ=КпV+δk,
где Кп - коэффициент передачи ПАР, значение которого зависит от значений параметров РМ и аэродинамической шарнирной нагрузки/Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. -М.: Машиностроение, 1965, с. 191/;
δk - колебательная составляющая отклонений аэродинамических рулей ЛА на частоте внешнего периодического воздействия (частоте сигнала ГЛК);
V - сигнал управления приводом (сигнал с выхода АУ).
В более общем случае угол отклонения рулей δ для реального ПАР имеет вид:
δ=KпV+δk+δ0, (1)
где δ0 - «ненуль» привода, обусловленный несимметрией механических элементов ПАР: электромеханического преобразователя, распределительного устройства и исполнительного двигателя, являющихся составными частями РМ.
Наличие «ненуля» ПАР в случае применения в невращающемся ЛА приводит к его уводам относительно заданной линии наведения.
Во вращающемся ЛА, например во вращающейся по углу крена ракете, «ненуль» усредняется за период ее вращения и практически не влияет на отклонения от заданной линии наведения, однако, он вызывает увеличение колебаний ракеты по углам атаки и скольжения. В свою очередь, это приводит к уменьшению продольной скорости ракеты вследствие повышения индуктивной составляющей ее аэродинамического сопротивления.
Недостатком способа и реализующего его устройства, представленных в прототипе, является отсутствие мероприятий по уменьшению «ненуля» ПАР.
Задачей предлагаемого изобретения является повышение точности работы ПАР посредством уменьшения его «ненуля».
Поставленная задача решается за счет того, что в способе управления ракетой, включающем формирование системой управления ракетой управляющего сигнала автоколебательным приводом аэродинамических рулей, вибрационную линеаризацию этого сигнала путем его суммирования с внешним линеаризующим сигналом и соответствующее отклонение приводом аэродинамических рулей, новым является то, что формируют сигнал, пропорциональный интегрированному вибрационно-линеаризованному сигналу, а управляющий автоколебательным приводом сигнал формируют как сумму вибрационно-линеаризованного сигнала и сигнала, пропорционального интегрированному вибрационно-линеаризованному сигналу, причем коэффициент интегрирования kи, 1/с, устанавливают в соответствии с выполнением условия
где tп - полетное время ракеты на максимальную дальность стрельбы, с;
ωПАР - полоса пропускания ПАР, 1/с.
В системе управления ракетой, реализующей этот способ, включающей аппаратуру управления ракетой, содержащую последовательно соединенные устройство измерения рассогласования ракеты с заданной линией наведения и устройство формирования сигналов управления, а также генератор линеаризующих колебаний и привод аэродинамических рулей, содержащий последовательно соединенные усилитель мощности, релейный элемент, рулевую машинку, датчик отклонения рулей и суммирующий усилитель, второй вход которого подключен к выходу аппаратуры управления ракетой, которым является выход устройства формирования сигналов управления, новым является то, что в нее введены последовательно соединенные интегрирующий усилитель и второй суммирующий усилитель, выход которого соединен со входом усилителя мощности, причем вход интегрирующего усилителя и второй вход второго суммирующего усилителя соединены с выходом первого суммирующего усилителя, а выход генератора линеаризующих колебаний соединен с третьим входом первого суммирующего усилителя.
Сущность предлагаемой совокупности технических решений заключается в том, что в управляющий автоколебательным приводом сигнал дополнительно вводится путем суммирования сигнал, пропорциональный его интегрированному значению, который минимизирует (уменьшает до нуля) «ненуль» в замкнутой системе, охваченной отрицательной обратной связью. Для обеспечения эффективности предлагаемого способа необходимо:
во-первых, минимизировать «ненуль» в течение времени, гораздо меньшего времени полета ракеты на максимальную дальность стрельбы;
во-вторых, не допустить существенного изменения частотных характеристик системы в области высоких частот, дабы не изменять свойства режима вибрационной линеаризации ПАР.
Введенные в предлагаемый способ операции и реализующие их элементы устройства (соединенные между собой интегрирующий усилитель и второй суммирующий усилитель) математически описываются в операторной форме в виде передаточной функции

где  - оператор дифференцирования;
- оператор дифференцирования;
 - постоянная времени интегрирования, с.
- постоянная времени интегрирования, с.
Как известно, точность стрельбы (вероятность попадания) в рассматриваемой системе управления, ухудшается с ростом дальности до цели. Это обусловлено, главным образом, увеличением ошибок наведения, линейные значения которых возрастают пропорционально дальности до цели. Дополнительным фактором является ухудшение характеристик самой ракеты к концу полета вследствие падения ее скорости по окончании работы реактивного двигателя, что увеличивает подчеркивание указанных ошибок наведения.
Следовательно, наличие «ненуля» и возникающие при этом уводы невращающейся ракеты или колебания по углам атаки и скольжения вращающейся ракеты не являются критичными при стрельбе на ближние и средние дальности, но могут значительно снижать точность при стрельбе на максимальные дальности.
Время переходного процесса по устранению «ненуля» с помощью введенных элементов для звена первого порядка можно принять равным (2…3)Ти (В.А. Бесекерский, Е.П. Попов. Теория систем автоматического регулирования. М., «Наука», 1972, с. 71) и это время предпочтительно должно быть на порядок меньше полетного времени ракеты tп на максимальную дальность стрельбы, т.е.
(20…30)Tи<tп
или с учетом 
С другой стороны, значение kи, определяющее полосу звена из введенных элементов, должно быть на порядок (плюс некоторый запас) меньше полосы пропускания ПАР ωПАР во избежание влияния на его свойства в режиме вибрационной линеаризации, т.е.
(20…30)kи<ωПАР
или
Объединяя условия (4) и (5), получим условие (2).
Например, при tп=40 с и ωПАР=100 1/с значение коэффициента интегрирования выбирается в диапазоне (0,5…0,75)<kи<(3,3…5,0), 1/с.
Предлагаемое изобретение поясняется графическим материалом.
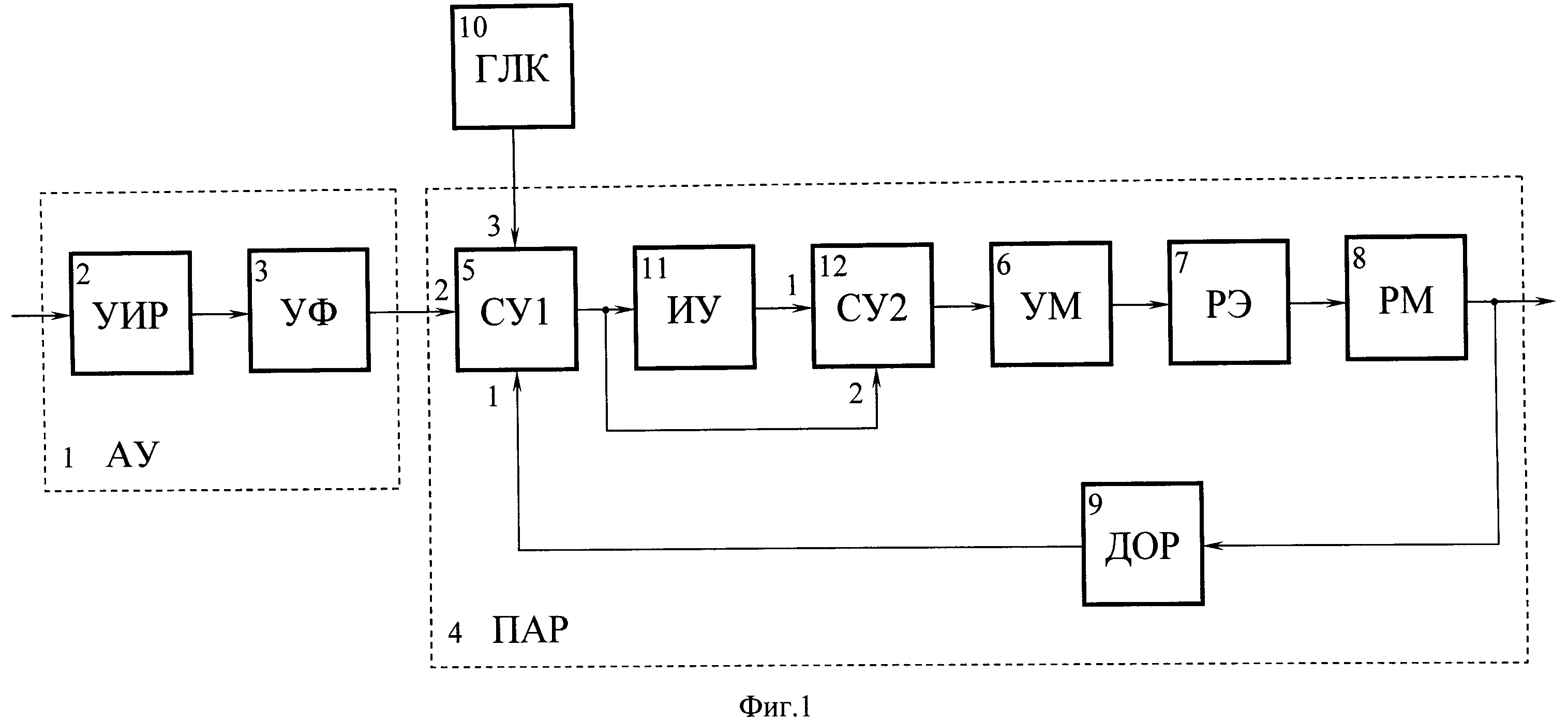
Структура предлагаемой системы управления приведена на фиг.1, где 1 - аппаратура управления (АУ), 2 - устройство измерения рассогласования (УИР), 3 - устройство формирования (УФ) сигналов управления, 4 - привод аэродинамических рулей (ПАР), 5 - первый суммирующий усилитель (СУ1), 6 - усилитель мощности (УМ), 7 - релейный элемент (РЭ), 8 - рулевая машинка (РМ), 9 - датчик отклонения рулей (ДОР), 10 - генератор линеаризующих колебаний (ГЛК), 11 - интегрирующий усилитель (ИУ), 12 - второй суммирующий усилитель (СУ2).
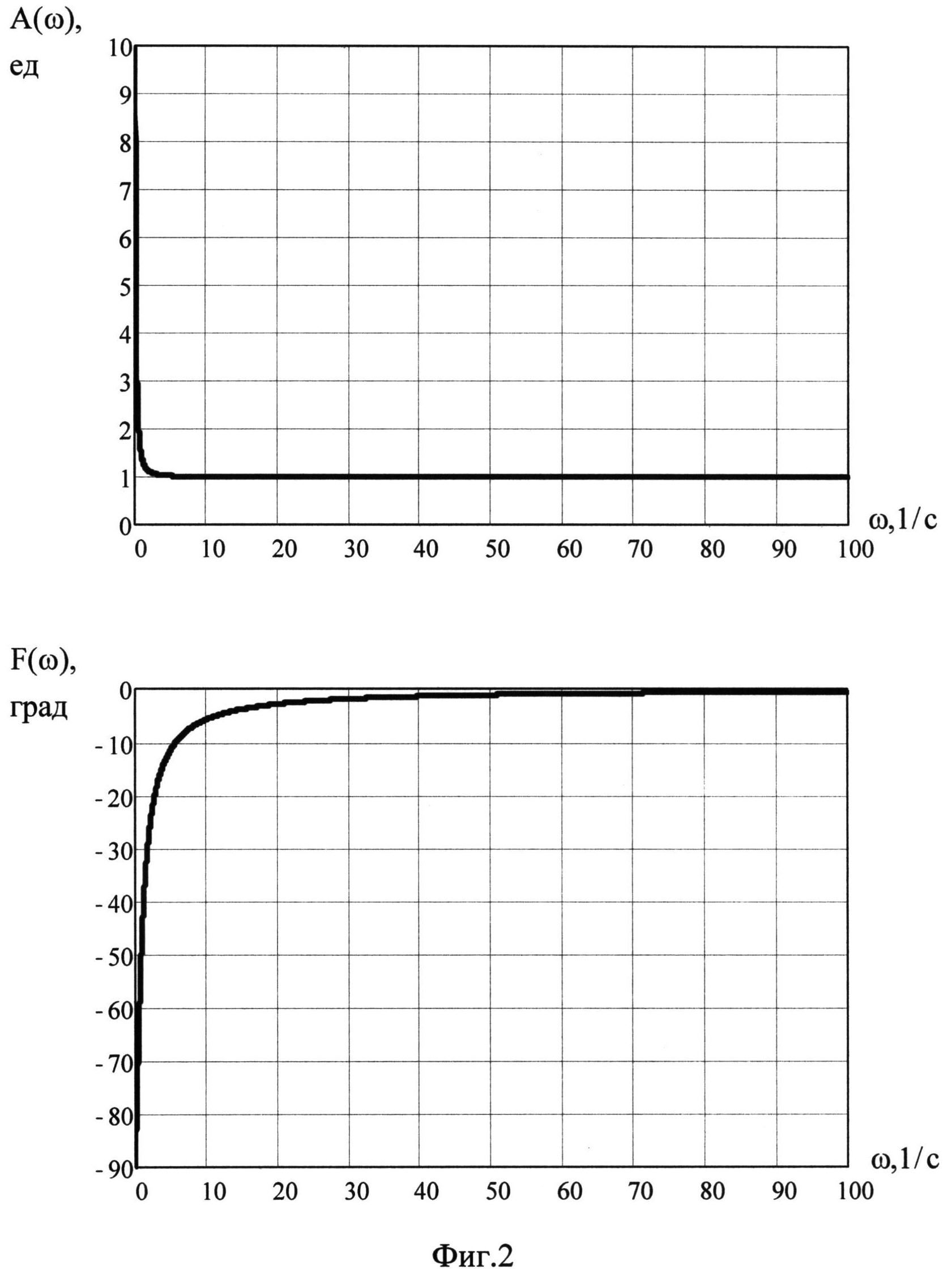
На фиг.2 приведены амплитудная А(ω) и фазовая F(ω) частотные характеристики блока из введенных элементов ИУ-СУ2 согласно передаточной функции (3) при kи=1,0 1/с.
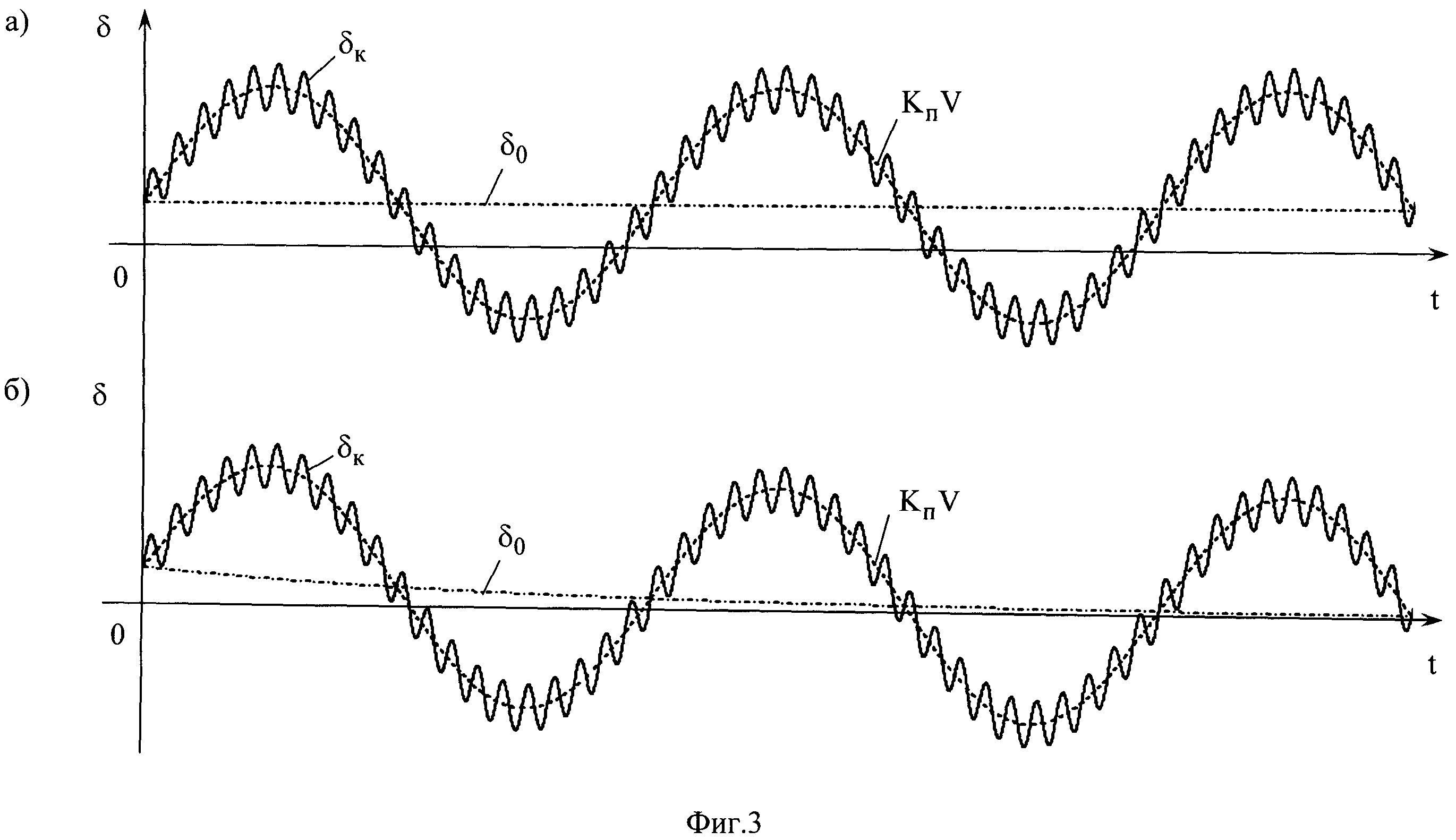
Выходной сигнал ПАР δ (отклонение руля) вращающейся по углу крена ракеты для существующего и предлагаемого способов представлен на фиг.3 (а и δ соответственно).
Предлагаемая система управления (фиг.1) работает следующим образом.
В АУ 1 УИР 2 определяет сигналы линейных рассогласований hy, hz относительно заданной линии наведения. УФ сигналов управления 3 вырабатывает команды управления. ПАР 4 с помощью ДОР 13 охвачен обратной связью, а ГЛК 14 обеспечивает режим вибрационной линеаризации. Эти три сигнала суммируются на СУ1 5. При наличии «ненуля» ПАР блок из введенных элементов ИУ-СУ2 обеспечивает его плавную ликвидацию.
Приведенные на фиг.2 амплитудная А(ω) и фазовая F(ω) частотные характеристики блока элементов ИУ-СУ2 показывают, что этот блок не изменяет частотные характеристики системы в области высоких частот (при ω≥75 1/с A(ω)≈1 и F(ω)≈0) и, соответственно, не изменяются характеристики режима вибрационной линеаризации ПАР, т.е. сохраняются положительные свойства прототипа.
На фиг.3 представлены графики отклонения руля для существующего (а) и предлагаемого (б) способов. Согласно зависимости (1), отклонение руля на графике содержит:
команду управления (на частоте вращения ракеты) KпV, представленную штриховой линией;
колебательную составляющую (на частоте линеаризации) δк, представленную сплошной линией;
«ненуль» δ0, представленный штрихпунктирной линией.
Предлагаемая совокупность технических решений, как видно из фиг.3б, обеспечивает минимизацию «ненуля» ПАР.
В качестве ИУ может быть использована схема, представленная в книге Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для ABM. - М.: Энергия, 1978, с. 24.
В качестве остальных элементов системы могут быть использованы устройства, представленные в прототипе.
Применение предлагаемой совокупности технических решений позволяет повысить точность наведения ракет.
Способ селекции импульсов и селектор импульсов полуактивной головки самонаведения
Универсальный боевой модуль
Способ наведения вращающейся ракеты с релейным приводом рулевого органа и система для его осуществления
Станок
Устройство для заряжания и разряжания ракеты в контейнере боевой машины зенитного ракетного комплекса ближнего действия
Патрон
Способ стрельбы управляемой ракетой
Патрон
Комплекс вооружения
Способ телеуправления ракетой
Способ селекции импульсов и селектор импульсов полуактивной головки самонаведения
Универсальный боевой модуль
Способ наведения вращающейся ракеты с релейным приводом рулевого органа и система для его осуществления
Станок
Устройство для заряжания и разряжания ракеты в контейнере боевой машины зенитного ракетного комплекса ближнего действия
Патрон
Способ стрельбы управляемой ракетой
Патрон
Комплекс вооружения
Способ телеуправления ракетой

