Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ РАБОЧИХ СОСТОЯНИЙ АВТОМОБИЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способу определения рабочих состояний автомобильного транспортного средства в соответствии с преамбулой пункта 1 формулы изобретения. Изобретение относится также к системе для определения рабочих состояний автомобильного транспортного средства в соответствии с преамбулой пункта 9 формулы изобретения. Изобретение относится также к автомобильному транспортному средству.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В настоящее время принято указывать, сколько еще автомобильное транспортное средство, в частности автомобиль, может двигаться до необходимости заправки, именуемое "запас топлива" (DTE). Такой способ информирования водителя отлично подходит для транспортных средств, которые двигаются по дорогам на определенных скоростях, которые существенно больше ноля, к необходимому назначению. DTE не является актуальным в случае транспортных средств, которые выполняют больше стационарных задач, например в промышленности, ограниченной определенной областью, такой как раскрой лесоматериала или тому подобное. Если оставшееся время доступности транспортного средства является более актуальным, водитель, например, будет знать, нуждается ли транспортное средство в заправке до конца текущей смены.
US 7206720B2 связан с длительностью времени, оставшегося до необходимости заправки, именуемого "запас времени хода" (TTE).
Проблема в том, что некоторые автомобили имеют как стационарные задачи, так и задачи, которые влекут за собой движение на скоростях значительно выше ноля.
ЗАДАЧА ИЗОБРЕТЕНИЯ
Задача настоящего изобретения - предложить способ для определения рабочих состояний автомобильного транспортного средства, который облегчает предоставление информации о текущем рабочем состоянии.
Дополнительная задача настоящего изобретения - предложить систему для определения рабочих состояний автомобильного транспортного средства, которая облегчает предоставление информации о текущем рабочем состоянии.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Эти и другие задачи, указанные в нижеизложенном описании, достигаются способом и системой для определения рабочих состояний автомобильного транспортного средства и автомобильным транспортным средством указанного во введении вида, которые дополнительно имеют признаки, указанные в отличительных частях прилагаемых независимых пунктов 1 и 9 формулы изобретения. Предпочтительные варианты осуществления способа и система определены в прилагаемых зависимых пунктах 2-8 и 10-17 формулы изобретения.
В соответствии с изобретением задача достигается с помощью способа для определения рабочих состояний автомобильного транспортного средства, содержащего этап определения состояния скорости транспортного средства, содержащего этапы сравнения упомянутого состояния скорости с заданной скоростью, определения на основе упомянутого сравнения рабочего состояния и предоставления информации о том, является ли рабочее состояние, которое определено, стационарным состоянием или состоянием движения. Это упрощает предоставление информации, если транспортное средство находится в рабочем состоянии и, следовательно, движется выше определенной скорости или в стационарном состоянии и, следовательно, не движется выше упомянутой скорости, что упрощает принятие решения о предоставлении информации о том, сколько времени осталось до того, как транспортное средство будет нуждаться в заправке в стационарном состоянии, и сколько еще оно может двигаться до того, как оно будет нуждаться в заправке в рабочем состоянии.
В соответствии с вариантом осуществления способ содержит этап определения рабочего состояния и определения заданной стабильности конкретного состояния скорости. Это позволяет избежать риска неопределения намерения транспортного средства продолжать находиться в течение определенного времени в рабочем состоянии, тем самым облегчая определение правильного рабочего состояния.
В соответствии с вариантом осуществления способ дополнительно содержит этап определения, различается ли упомянутое конкретное состояние скорости со скоростью транспортного средства ниже упомянутой заданной скорости по меньшей мере с заданной стабильностью. Это позволяет определить, состоит ли намерение транспортного средства в том, чтобы продолжать находиться в стационарном состоянии таким образом, чтобы избежать определения стационарных состояний, где намерение транспортного средства не состояло в том, чтобы продолжать находиться в течение определенного времени в стационарном состоянии.
В соответствии с вариантом осуществления способ содержит этап определения стационарного состояния, если скорость транспортного средства ниже заданной скорости по меньшей мере с заданной стабильностью. Это означает, что определены только стационарные состояния, где намерение транспортного средства состояло в том, чтобы продолжать находиться в стационарном состоянии в течение определенного времени.
В соответствии с вариантом осуществления способ дополнительно содержит этап определения, различается ли упомянутое конкретное состояние скорости со скоростью транспортного средства, которая превышает заданную скорость по меньшей мере с заданной стабильностью. Это позволяет определить, состояло ли намерение транспортного средства в том, чтобы продолжать находиться в состоянии движения таким, чтобы избежать определения состояний движения, где намерение транспортного средства не состояло в том, чтобы продолжать находиться в течение определенного времени в состоянии движения.
В соответствии с вариантом осуществления способ содержит этап определения состояния движения, если скорость транспортного средства соответствует или превышает заданную скорость по меньшей мере с заданной стабильностью. Это означает, что состояния движения определены только тогда, когда намерение транспортного средства состояло в том, чтобы продолжать находиться в состоянии движения в течение определенного времени.
В соответствии с вариантом осуществления способ содержит этап определения состояния движения, если упомянутое состояние скорости отличается скоростью транспортного средства, которая превышает заданную скорость больше, чем упомянутая заданная скорость. Это делает возможным переход от стационарного состояния к состоянию движения, как только транспортное средство достигает определенной скорости, таким образом, что его намерение состоит в том, чтобы быть в состоянии движения.
В соответствии с вариантом осуществления способ содержит этап определения времени для необходимой заправки в течение определенных стационарных состояний. Водитель, таким образом, принимает соответствующую информацию о заправке, то есть когда транспортное средство находится в стационарном состоянии, он автоматически принимает информацию о том, сколько времени осталось до необходимой заправки, таким образом снижая риск выработки топлива.
В соответствии с вариантом осуществления способ содержит этап определения того, сколько еще транспортное средство может двигаться в определенном состоянии движения прежде, чем оно будет нуждаться в заправке. Водитель, таким образом, получает актуальную информацию о заправке, то есть когда транспортное средство находится в состоянии движения, он автоматически получает информацию о том, сколько еще оно может двигаться до необходимости заправки, таким образом снижая риск выработки топлива.
В соответствии с изобретением задача достигается с помощью системы для определения рабочих состояний автомобильного транспортного средства, содержащей средство для определения состояния скорости транспортного средства, отличающейся средством для сравнения упомянутого состояния скорости с заданной скоростью, средством для определения рабочего состояния на основе упомянутого сравнения и средством для предоставления информации о том, является ли рабочее состояние, которое определено, стационарным состоянием или состоянием движения. Это упрощает предоставление информации о том, находится ли транспортное средство в рабочем состоянии и, следовательно, движется выше определенной скорости или в стационарном состоянии и, следовательно, не движется выше упомянутой скорости, что упрощает принятие решения предоставить информацию о том, сколько времени осталось до того, как транспортное средство будет нуждаться в заправке в стационарном состоянии, и сколько еще оно может двигаться до того, как оно будет нуждаться в заправке в состоянии движения.
В соответствии с вариантом осуществления система содержит упомянутое средство для определения рабочего состояния и для определения заданной равномерности конкретного состояния скорости. Это позволяет избежать риска, что намерение транспортного средства не могло бы состоять в том, чтобы продолжать находиться в течение определенного времени в рабочем состоянии, тем самым облегчая определение правильного рабочего состояния.
В соответствии с вариантом осуществления система дополнительно содержит средство для определения того, отличается ли упомянутое конкретное состояние скорости скоростью транспортного средства ниже упомянутой заданной скорости по меньшей мере с заданной стабильностью. Это позволяет определить, состояло ли намерение транспортного средства в том, чтобы продолжать находиться в стационарном состоянии, чтобы избежать определения стационарных состояний, где намерение транспортного средства не состояло в том, чтобы продолжать находиться в течение определенного времени в стационарном состоянии.
В соответствии с вариантом осуществления система содержит средство для определения стационарного состояния, если упомянутая скорость транспортного средства ниже упомянутой заданной скорости по меньшей мере с заданной стабильностью. Это означает, что определены только стационарные состояния, где намерение транспортного средства состояло в том, чтобы продолжать находиться в стационарном состоянии в течение определенного времени.
В соответствии с вариантом осуществления система дополнительно содержит средство для определения, отличается ли упомянутое конкретное состояние скорости скоростью транспортного средства, которая превышает упомянутую заданную скоростью по меньшей мере с заданной стабильностью. Это позволяет определить, состояло ли намерение транспортного средства в том, чтобы продолжать находиться в состоянии движения, чтобы избежать определения состояний движения, где намерение транспортного средства не состояло в том, чтобы продолжать находиться в течение определенного времени в состоянии движения.
В соответствии с вариантом осуществления система содержит средство для определения рабочего состояния, если упомянутая скорость транспортного средства соответствует или превышает упомянутую заданную скорость по меньшей мере с заданной стабильностью. Это означает, что состояния движения определяются, только где намерение транспортного средства было продолжать работу в состояниях движения в течение определенного времени.
В соответствии с вариантом осуществления система содержит средство для определения состояний движения, если упомянутое состояние скорости отличается скоростью транспортного средства, которая превышает дополнительно заданную скорость больше, чем упомянутая заданная скорость. Это делает возможным переход из стационарного состояния в состояние движения, как только транспортное средство достигает определенной скорости, таким образом, что его намерение состоит в том, чтобы быть в состоянии движения.
В соответствии с вариантом осуществления система содержит средство для определения времен необходимых для заправки во время определенных стационарных состояний. Водитель, таким образом, получает соответствующую информацию о заправке, то есть, когда транспортное средство находится в стационарном состоянии, он автоматически получает информацию о том, сколько времени осталось до необходимости заправки, таким образом снижая риск выработки топлива.
В соответствии с вариантом осуществления система содержит средство для определения того, сколько еще транспортное может двигаться в определенном состоянии движения, прежде чем оно будет нуждаться в заправке. Водитель, таким образом, получает соответствующую информацию о заправке, то есть, если транспортное средство находится в состоянии движения, он автоматически получает информацию о том, сколько еще оно может двигаться до необходимости заправки, таким образом снижая риск выработки топлива.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет лучше понято из нижеследующего подробного описания в сочетании с сопровождающими чертежами, на которых один и тот же ссылочный индекс относится к аналогичным объектам на разных фигурах, на которых:
фиг.1 представляет собой схематический вид транспортного средства сбоку;
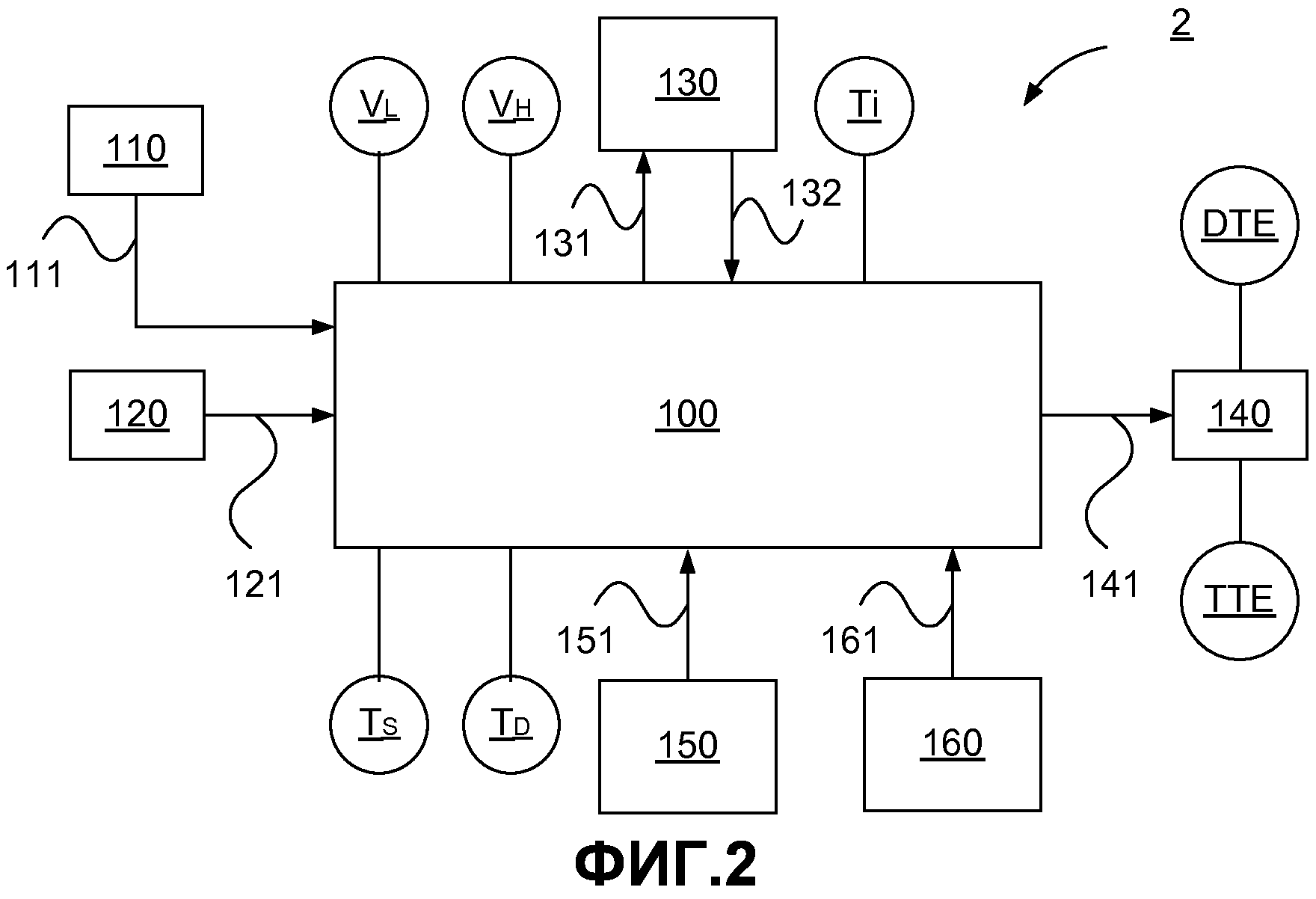
на фиг.2 схематично показана система для определения рабочих состояний автомобильного транспортного средства в соответствии с вариантом осуществления настоящего изобретения;
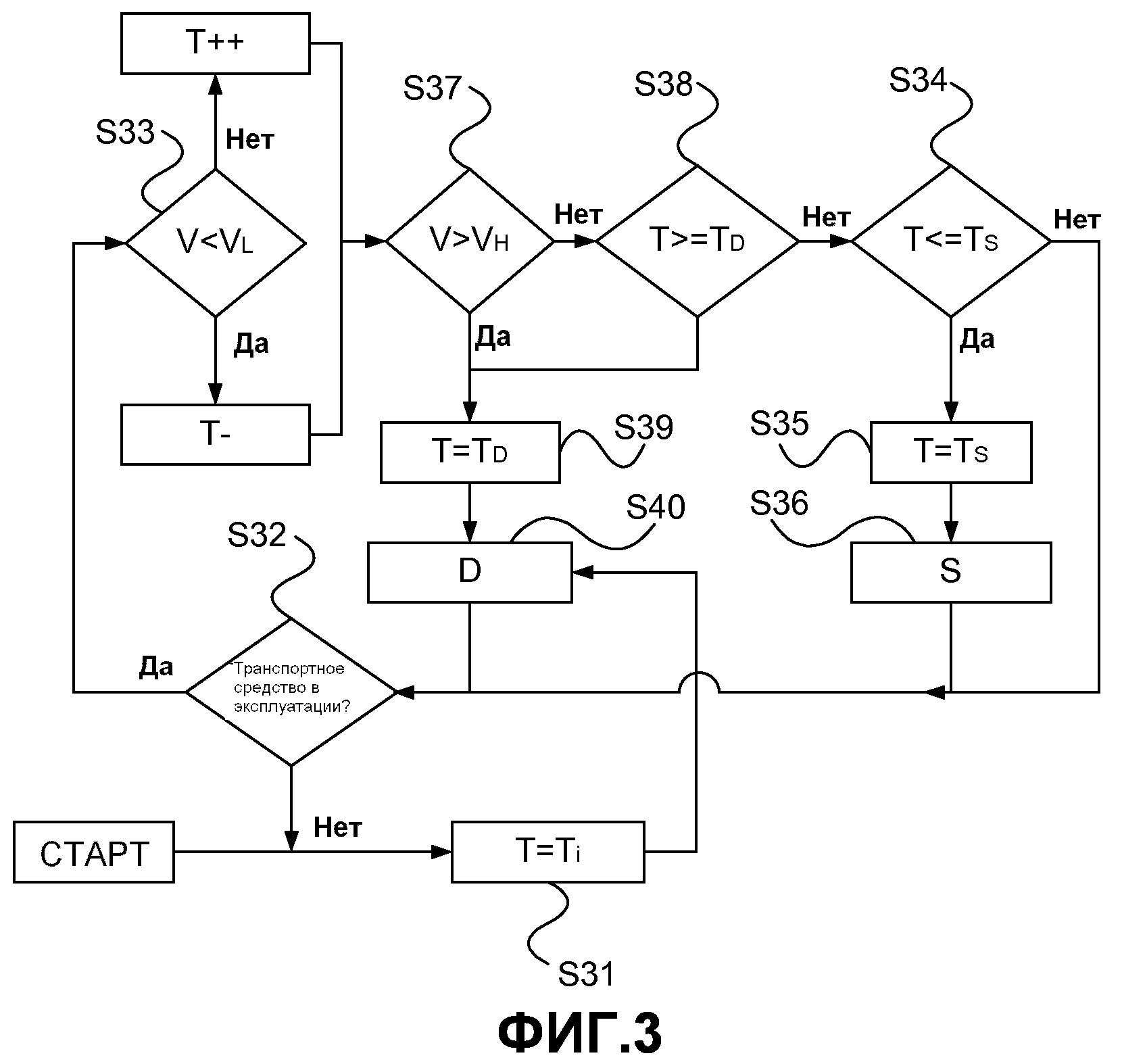
фиг.3 представляет собой структурную схему способа для определения рабочего состояния в соответствии с вариантом осуществления настоящего изобретения;
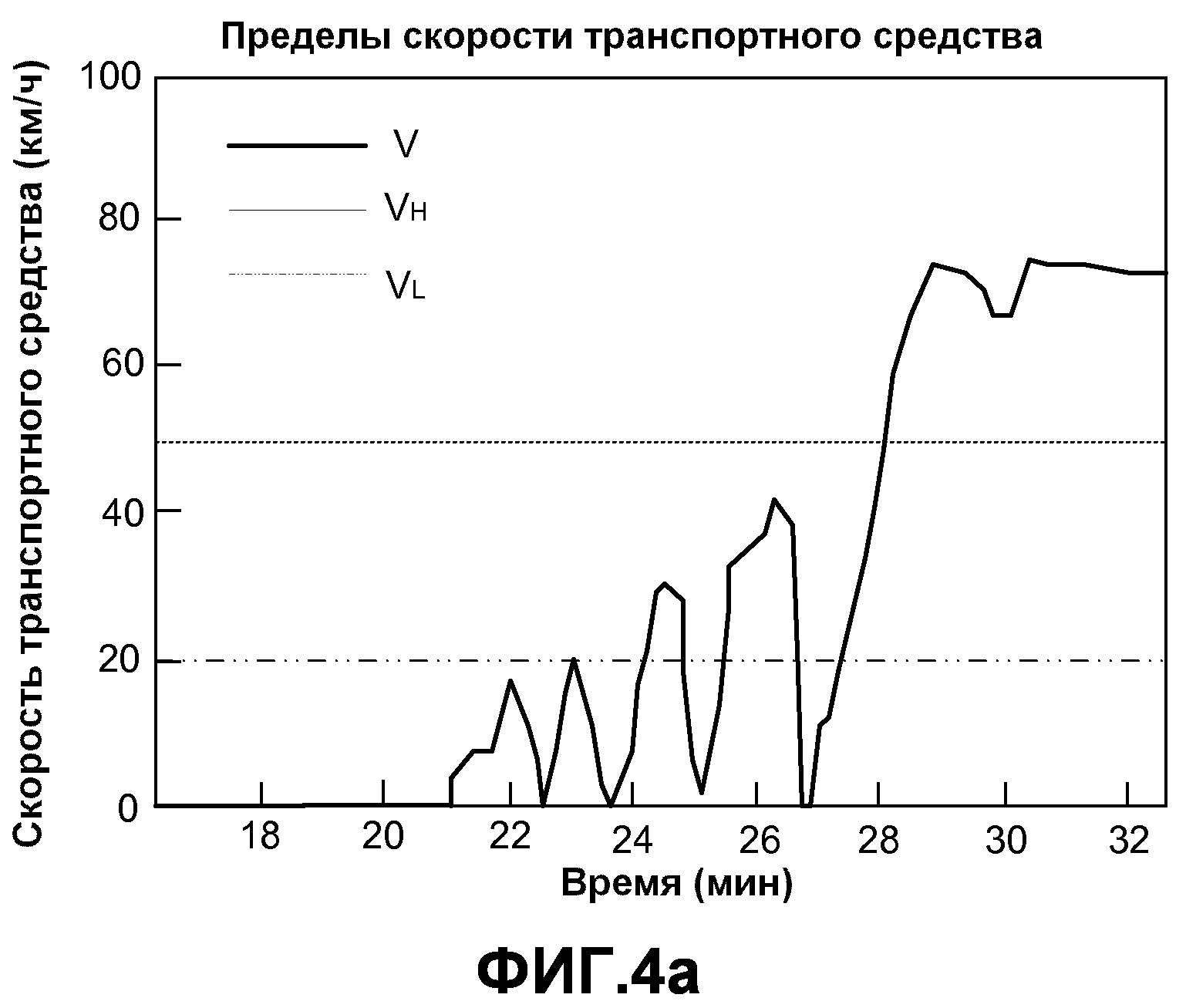
на фиг.4a схематично показано изменение скорости транспортного средства с течением времени;
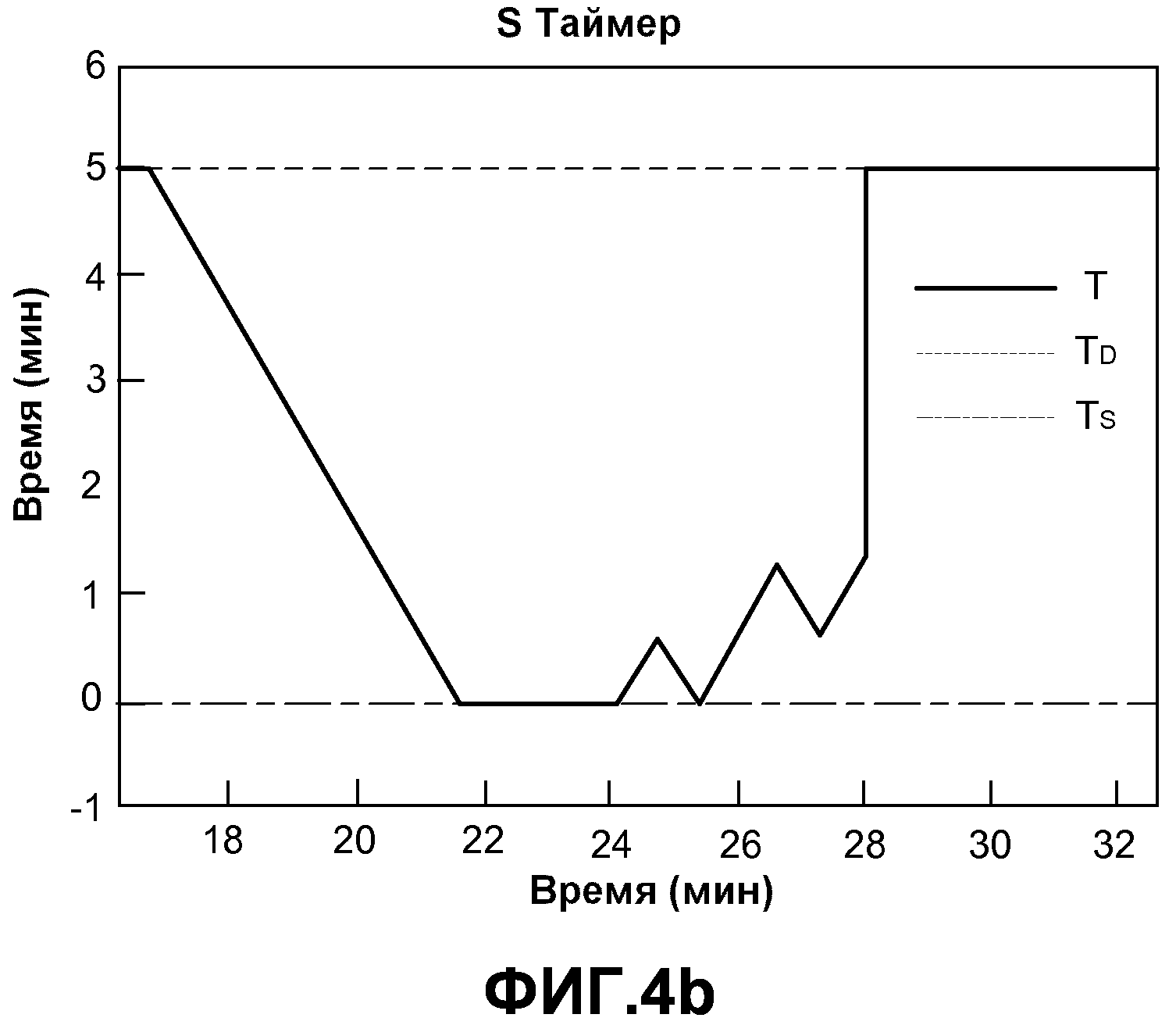
на фиг.4b схематично показано, как состояния транспортного средства меняются в соответствии с системой на фиг.2 и способом на фиг.3 с изменением скорости на фиг.4a; и
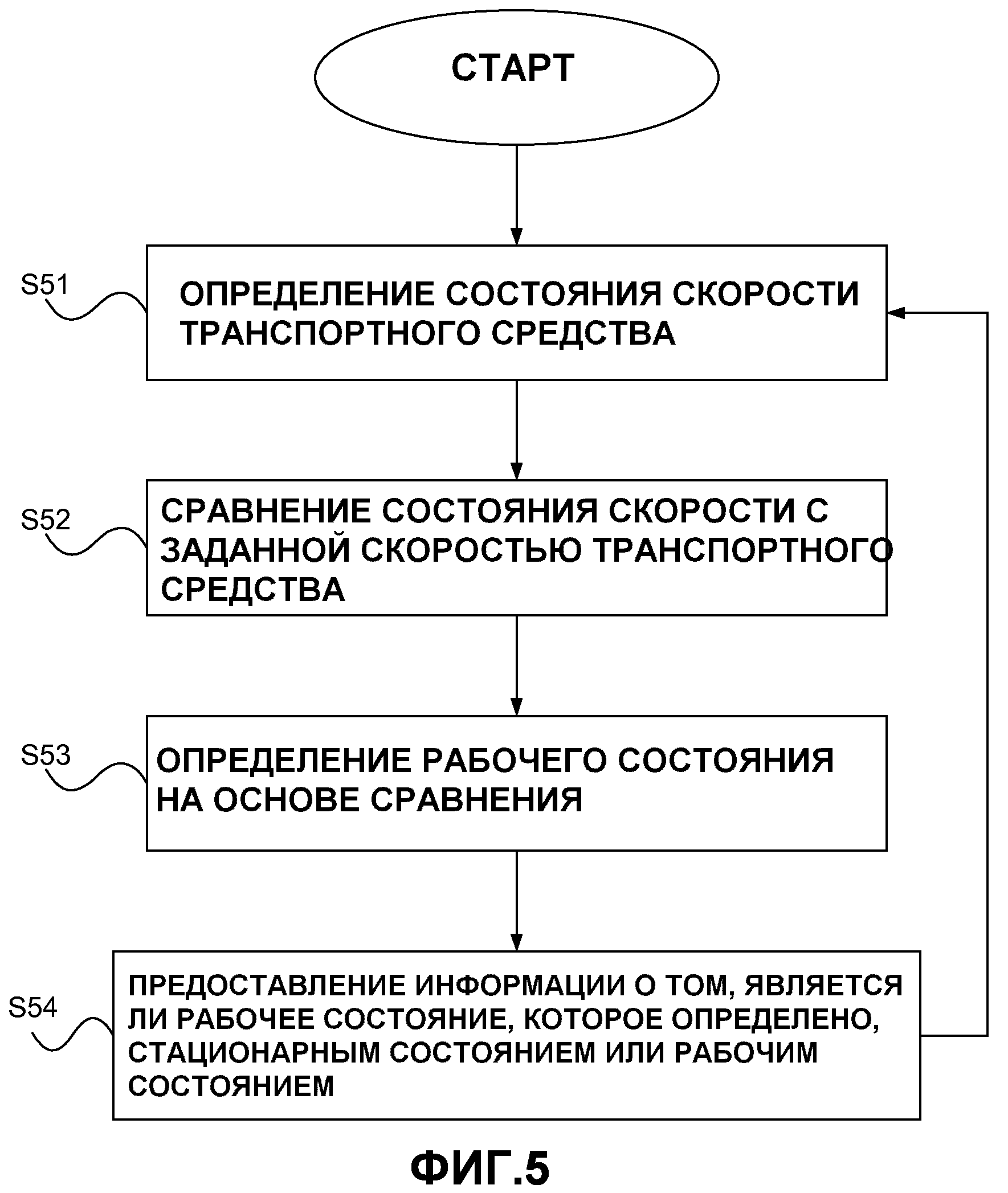
фиг.5 представляет собой структурную схему способа для определения рабочего состояния в соответствии с вариантом осуществления настоящего изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Термин "рабочее состояние" означает здесь то состояние, в котором транспортное средство работает, т.е. его двигатель активирован/включен в состояние движения или стационарное состояние.
Термин "состояние движения" означает здесь состояние, в котором транспортное средство движется или в определенное заданное время запланировано движение на скорости, которое соответствует или превышает заданное пороговое значение.
Термин "стационарное состояние" означает здесь то состояние, в котором транспортное средство неподвижно или движется с определенной скоростью ниже упомянутого заданного порогового значения.
На фиг.1 показан вид транспортного средства 1 сбоку. Представленное в качестве примера транспортное средство 1 - это тяжелый автомобиль в виде грузовика, например коммерческий автомобиль. Транспортное средство может также быть автобусом или легковым автомобилем. Транспортное средство обеспечено системой для определения рабочих состояний автомобильного транспортного средства в соответствии с настоящим изобретением.
Фиг.2 представляет собой структурную схему системы 2 для определения рабочего состояния в соответствии с вариантом осуществления настоящего изобретения.
Система 2 содержит блок 100 электронного управления для управления системами транспортного средства. Блок 100 электронного управления подключен по линии 111 связи к средству 110 активации транспортного средства для активации транспортного средства так, что оно переходит из нерабочего состояния в рабочее состояние, т.е. его двигатель запускается или по меньшей мере зажигание включается. Блок 100 электронного управления выполнен с возможностью приема от упомянутого средства 110 активации транспортного средства по линии связи сигнала, который представляет собой данные об активации транспортного средства.
Блок 100 электронного управления выполнен с возможностью сравнения упомянутых данных об активации транспортного средства с заданным значением активации транспортного средства, которое представляет собой активированное транспортное средство, т.е. двигатель изменяется из выключенного в работающий.
В соответствии с вариантом осуществления настоящего изобретения, когда упомянутое значение активации транспортного средства выполнено, т.е. там, где двигатель транспортного средства изменяется от выключенного в работающий, блок 100 электронного управления выполнен с возможностью активирования состояния движения D так, чтобы система 2 в момент запуска транспортного средства была введена в упомянутое состояние движения D, т.е. система 2 предполагает, что транспортное средство считается как можно скорее движущимся на определенной скорости, которая соответствует или выше, чем нижнее пороговое значение VL, т.е. автомобиль не считается находящимся в стационарном состоянии S.
В соответствии с альтернативным вариантом осуществления настоящего изобретения, когда упомянутое значение активации транспортного средства выполнено, т.е. там, где двигатель транспортного средства переходит из выключенного режима в работающий режим, блок 100 электронного управления активирует стационарное состояние S так, чтобы система 2 в момент запуска транспортного средства была введена в упомянутое стационарное состояние S, т.е. система 2 предполагает, что транспортное средство считается находящимся в стационарном состоянии S и, следовательно, движется со скоростью ниже упомянутого нижнего порогового значения VL.
Блок 100 электронного управления подключен по линии 121 связи к средству 120 определения скорости, которое выполнено с возможностью контроля скорости транспортного средства. Блок 100 электронного управления выполнен с возможностью приема от средства 120 определения скорости по линии связи сигнала, который представляет собой данные о скорости транспортного средства.
Блок 100 электронного управления подключен по первой линии 131 связи и второй линии 132 связи к блоку 130 таймера, который выполнен с возможностью приращения или уменьшения. Блок 100 электронного управления выполнен с возможностью отправки блоку 130 таймера по первой линии 131 связи сигнала, который представляет собой данные об активации для активирования блока 130 таймера для приращения или уменьшения. Блок 100 электронного управления выполнен с возможностью приема от блока 130 таймера по второй линии 132 связи сигнала, который представляет собой данные о таймере. Согласно варианту блок 130 таймера является неотъемлемой частью блока 100 электронного управления.
Блок 100 электронного управления выполнен с возможностью сравнения упомянутых данных о скорости транспортного средства с заданными пороговыми значениями VL, VH скорости транспортного средства. Упомянутые пороговые значения содержат нижнее пороговое значение VL и верхнее пороговое значение VH, которое выше, чем нижнее пороговое значение VL.
Блок 100 электронного управления сигнально подключен по линии 141 связи к блоку 140 рабочего состояния для активации последнего для предоставления информации о рабочих состояниях. Согласно этому варианту осуществления блок 140 рабочего состояния выполнен с возможностью предоставления информации о времени, оставшемся до необходимости заправки (TTE) или сколько еще транспортное средство может двигаться до необходимости заправки (DTE).
В соответствии с вариантом осуществления настоящего изобретения, когда упомянутое значение активации транспортного средства выполнено и состояние движения D активировано, блок 100 электронного управления выполнен с возможностью установки времени инициирования уменьшения Ti, которое отражает, как долго блок 130 таймера должен выполнять уменьшение до выполнения заданного порогового значения уменьшения Ts.
Во время уменьшения с упомянутого времени инициирования уменьшения Ti блок 100 электронного управления сравнивает данные о таймере с упомянутым пороговым значением уменьшения Ts. Когда упомянутое пороговое значение уменьшения Ts будет достигнуто, блок 100 электронного управления отправления в блок 140 рабочего состояния по линии связи сигнала, который представляет собой данные о стационарном состоянии, после чего блок 140 рабочего состояния изменяет состояние из состояния движения D в стационарное состояние S и предоставляет информацию об оставшемся времени до необходимости заправки (TTE).
В соответствии с вариантом осуществления настоящего изобретения, когда упомянутое значение активации транспортного средства выполнено и стационарное состояние S активировано, блок 100 электронного управления выполнен с возможностью установки времени инициирования, которое отражает, как долго блок 130 таймера должен выполнять приращение до выполнения заданного порогового значения приращения TD.
Во время приращения с упомянутого времени инициирования приращения блок 100 электронного управления сравнивает данные о таймере с пороговым значением приращения TD. Когда пороговое значение приращения TD достигнуто, блок 100 электронного управления отправляет в блок 140 рабочего состояния по линии связи сигнал, который представляет собой данные о состоянии движения, после чего блок 140 рабочего состояния изменяет состояние из стационарного состояния в состояние движения D и предоставляет информацию о том, сколько еще транспортное средство может двигаться до необходимости заправки (DTE).
В рабочих состояниях транспортного средства, где упомянутые данные о скорости транспортного средства ниже упомянутого нижнего порогового значения VL, блок 100 электронного управления отправляет в блок 130 таймера по упомянутой первой линии связи сигналы для активирования уменьшения, так чтобы блок 130 таймера начал уменьшение.
Когда блок 130 таймера активирован на уменьшение, блок 100 электронного управления выполнен с возможностью приема по линии 131 связи сигналов, которые представляют собой данные о таймере уменьшения. Блок 100 электронного управления выполнен с возможностью сравнения упомянутых данных о таймере уменьшения с заданным пороговым значением уменьшения Ts.
Когда данные о таймере уменьшения составляют по меньшей мере пороговое значение уменьшения Ts, блок 100 электронного управления отправляет в блок 140 рабочего состояния сигнал для изменения рабочего состояния в стационарное состояние S.
В рабочих состояниях транспортного средства, где данные о скорости транспортного средства равны или превышают нижнее пороговое значение VL, блок 100 электронного управления отправляет в блок 130 таймера по упомянутой первой линии 131 связи сигналы для активирования приращения, так чтобы блок 130 таймера начал приращение.
Когда блок 130 таймера активирован на приращение, блок 100 электронного управления принимает по линии 131 связи сигналы, которые представляют собой данные о таймере приращения. Блок 100 электронного управления выполнен с возможностью сравнения данных о таймере приращения с заданным пороговым значением приращения TD.
Когда данные о таймере приращения составляют по меньшей мере пороговое значение приращения TD, блок 100 электронного управления отправляет сигнал в блок 140 рабочего состояния для изменения рабочего состояния в состояние движения D.
Блок 100 электронного управления сравнивает данные о скорости транспортного средства с заданным верхним пороговым значением VH скорости транспортного средства. Если данные скорости автомобиля превышают верхнее пороговое значение VH, блок 100 электронного управления отправляет в блок 140 рабочего состояния по линии 141 связи сигнал для изменения немедленно на состояние движения, не принимая во внимание данные о таймере, т.е. без учета времени на приращение блоком 130 таймера.
В соответствии с вариантом осуществления блок 100 электронного управления подключен по линии 151 связи к блоку 150 стояночного тормоза. Блок 100 электронного управления выполнен с возможностью приема от блока 150 стояночного тормоза сигнала, который представляет собой данные о стояночном тормозе, о том, активирован ли блок 150 стояночного тормоза. Блок 100 электронного управления выполнен с возможностью сравнения упомянутых данных стояночного тормоза с заданным значением активации стояночного тормоза. Когда упомянутое значение активации стояночного тормоза выполнено, т.е. когда блок 150 стояночного тормоза активирован, блок 100 электронного управления отправляет в блок 140 рабочего состояния сигнал для изменения рабочего состояния на стационарное состояние без учета времени на уменьшение блоком таймера.
В соответствии с вариантом осуществления блок 100 электронного управления подключен по линии 161 связи к блоку 160 коробки передач транспортного средства. Блок 100 электронного управления выполнен с возможностью приема от упомянутого блока 160 коробки передач транспортного средства сигнала, который представляет собой данные о состоянии коробки передач о том, находится ли упомянутый блок 160 коробки передач в нейтральном положении/положении стоянки. Блок 100 электронного управления выполнен с возможностью сравнения упомянутых данных о состоянии коробки передач с заданным значением состояния коробки передач. Когда упомянутое значение состояния коробки передач выполнено, т.е. когда блок 160 коробки передач транспортного средства активирован, блок 100 электронного управления выполнен с возможностью отправки в блок 140 рабочего состояния сигнала для изменения рабочего состояния на стационарное состояние.
Фиг.3 представляет собой структурную схему способа для определения рабочих состояний автомобильного транспортного средства в соответствии с вариантом осуществления настоящего изобретения. Определение рабочих состояний включает в себя предоставление информации о том, являются ли рабочие состояния, которые определены, стационарным состоянием S, когда определено время до необходимости заправки (TTE), или состоянием движения D, когда определено расстояние до необходимости заправки (DTE). Основным состоянием считается состояние движения D, которое инициируется при запуске транспортного средства, так чтобы информация о DTE была определена.
Этот способ содержит этап S31 установки времени T блока 130 таймера в соответствии с фиг.2 ко времени инициирования Ti, которое определяет начальное время для транспортного средства, чтобы пройти нижнее пороговое значение VL до переключения в стационарное состояние S.
Этап S32 способа выясняет, находится ли транспортное средство в эксплуатации. Если это не так, то способ возвращается в исходное состояние.
Если транспортное средство находится в эксплуатации, этап S33 способа выясняет, ниже ли его скорость V, чем нижнее пороговое значение VL. Если это так, то блок 130 таймера будет выполнять уменьшение.
Этап S34 способа затем выясняет, выполнено ли упомянутое пороговое значение уменьшения Ts, т.е. является ли время уменьшения T блока 130 таймера равным или меньшим, чем упомянутое пороговое значение уменьшения Ts. Если это так, то этап S35 способа установит время уменьшения T в пороговое значение Ts уменьшения, после чего этап S36 способа изменяет рабочее состояние на стационарное состояние S, так чтобы информация о TTE была предоставлена.
Если пороговое значение уменьшения Ts не выполнено, выясняется работает ли транспортное средство, и если это так, то этап S33 способа выясняет, ниже ли скорость V, чем нижнее пороговое значение VL.
Если скорость V транспортного средства выше или равна нижнему пороговому значению VL, этап S37 способа выясняет, выше ли она, чем верхнее пороговое значение VH. Если это так, то время приращения блока 130 таймера будет установлено в пороговое значение приращения TD, после чего стационарное состояние изменится на состояние движения D, так чтобы информация о DTE была предоставлена. Вслед за этим рабочее состояние изменяется на состояние движения D независимо от того выполняет ли упомянутое время приращения T пороговое значение приращения TD, т.е. рабочее состояние устанавливается в состояние движения, как только скорость V транспортного средства превышает упомянутое верхнее пороговое значение VH.
Если скорость V транспортного средства выше или равна нижнему пороговому значению VL, но не превышает верхнее пороговое значение VH, блок 130 таймера будет выполнять приращение. Этап S38 способа тогда выясняет, выполнено ли упомянутое пороговое значение приращения TD, т.е. равно ли время приращения T блока 130 таймера или меньше, чем упомянутое пороговое значение приращения TD. Если это так, то этап S39 способа устанавливает время приращения T в пороговое значение приращения TD, после чего этап S40 способа изменяет рабочее состояние на состояние движения D, так чтобы информация о DTE была предоставлена.
Следовательно, если рабочее состояние является состоянием движения D и скорость V транспортного средства ниже нижнего порогового значения VL так, что блок 130 таймера выполняет уменьшение и скорость V транспортного средства тогда увеличивается и становится выше, чем нижнее пороговое значение VL прежде, чем блок 130 таймера выполнил уменьшение к пороговому значению уменьшения Ts, блок 130 таймера вместо этого начнет приращение, таким образом поддерживая состояние движения D.
Аналогичным образом, если рабочее состояние является стационарным состоянием S и скорость V транспортного средства выше или равна нижнему пороговому значению V так, что блок 130 таймера выполняет приращение и скорость V транспортного средства тогда падает ниже нижнего порогового значения VL прежде, чем блок 130 таймера выполнил приращение к пороговому значению приращения TD, блок 130 таймера вместо этого начнет уменьшение, таким образом поддерживая стационарное состояние S.
В случае транспортного средства, работающего и в стационарном состоянии S и в состоянии движения D, водитель будет без необходимости предпринимать какие-либо действия самостоятельно принимать правильную информацию о заправке, т.е. актуальную информацию в установленный срок. Водитель будет проинформирован о TTE при эксплуатации в стационарном состоянии S и о DTE при эксплуатации в состоянии движения D, в котором транспортное средство движется со скоростью, превышающей упомянутое нижнее пороговое значение VL.
Переключение между стационарным состоянием S и состоянием движения D также основывается не только на скорости V транспортного средства, но и на равномерности T скорости транспортного средства, т.е. скорости транспортного средства, находящейся выше или ниже нижнего порогового значения VL в течение определенного времени, т.е. времени, во время которого блок 130 таймера выполняет приращение или уменьшение. Это означает, что водитель не будет потревожен без необходимости на ненужные переключения между стационарным состоянием S и состоянием движения D, например, когда рабочее состояние переходит от состояния движения D к стационарному состоянию S на красном сигнале светофора. Транспортные средства со стационарными задачами могут также двигаться со средними, высокими скоростями в течение определенного времени, не выходя из стационарного состояния S.
Транспортное средство также примет состояние движения D, как только его скорость V превысит упомянутое верхнее пороговое значение VH, так чтобы это не продолжалось в устойчивом состоянии S время от времени, когда очевидно, что намерение состоит в том, чтобы быть в состоянии движения D.
Первоначально отдельное время Ti инициирования может быть настроено так, что состояние движения D поддерживается в течение нужного времени, даже если транспортное средство находится в режиме холостого хода.
Фиг.4a изображает схематично изменение скорости транспортного средства со временем, и фиг.4b изображает схематично, как состояния транспортного средства изменяются в соответствии с системой на фиг.2 с изменением скорости на фиг.4a.
Таким образом, транспортное средство введено в рабочее состояние, когда рабочее состояние установлено в состояние движения D, т.е. транспортное средство запущено приблизительно в течение 16 минут. Транспортное средство имеет впоследствии скорость, которая равна нулю примерно до 21 минуты, а затем увеличивается почти до 20 км/ч за 22 минуты до падения примерно до нуля, снова поднимается почти до 20 км/ч, а затем снова падает так, что около 24 минуты она становится выше нижнего порогового значения VL, затем идет ниже нижнего порогового значения VL и опускается почти до нуля прежде, чем подняться обратно выше нижнего порогового значения VL, и падает до нуля, а затем, примерно с 27 минуты, превышает нижнее пороговое значение VL и около 28 минуты превышает верхнее пороговое значение VH.
Как видно на фиг.4b, время инициирования Ti установлено в 5 минут, т.е. блок 130 таймера должен выполнять уменьшение в течение 5 минут, эта совокупность приращения времени и уменьшения времени происходит до изменения рабочего состояния из состояния движения D в стационарное состояние S. В случае согласно фиг.4a, 4b, блок 130 таймера выполняет уменьшение, как показано на фиг.4b, к пороговому значению уменьшения ноля, которое занимает 5 минут, это время, за которое скорость V транспортного средства опускается ниже нижнего порогового значения VL. Когда в первый раз скорость V соответствует или превышает нижнее пороговое значение VL около 24 минуты, блок 130 таймера начнет приращение. Как только скорость V окажется ниже нижнего порогового значения VL, блок 130 таймера вернется к уменьшению, и после того, как нижнее пороговое значение VL превышено, блок 130 таймера снова выполнит приращение. Блок 130 таймера выполняет приращение и уменьшение, пока скорость V изменяется выше и ниже упомянутого нижнего порогового значения VL. Когда скорость V приблизительно на 28 минуте превышает верхнее пороговое значение VH, которое установлено в 50 км/ч, рабочее состояние переключается из стационарного состояния S к состоянию движения D без блока 130 таймера, выполнившего приращение к пороговому значению приращения TD.
Здесь время инициирования Ti установлено в 5 минут, соответствующих в этом примере пороговому значению приращения TD. Согласно альтернативному варианту время инициирования Ti может отличаться от порогового значения приращения TD. Время инициирования находится в диапазоне, большем или равном пороговому значению уменьшения Ts и меньшем или равном пороговому значению приращения TD.
Фиг.5 представляет собой структурную схему способа для определения рабочего состояния в соответствии с вариантом осуществления настоящего изобретения.
В соответствии с вариантом осуществления способ для определения рабочих состояний автомобильного транспортного средства содержит первый этап S51, который определяет состояние скорости транспортного средства.
В соответствии с вариантом осуществления способ для определения рабочих состояний автомобильного транспортного средства содержит второй этап S52, который сравнивает упомянутое состояние скорости с заданной скоростью.
В соответствии с вариантом осуществления способ для определения рабочих состояний автомобильного транспортного средства содержит третий этап S53, который определяет рабочее состояние на основе упомянутого сравнения.
В соответствии с вариантом осуществления способ для определения рабочих состояний автомобильного транспортного средства содержит четвертый этап S54, который предоставляет информацию о том, является ли определенное рабочее состояние стационарным состоянием или состоянием движения.
Приведенное выше описание предпочтительных вариантов осуществления настоящего изобретения предоставлено для иллюстративных и описательных целей. Описанные варианты не представляются исчерпывающими или ограничивающими изобретение. Специалистам, очевидно, будет предложено множество модификаций и изменений. Варианты осуществления были выбраны и описаны для того, чтобы лучше объяснить принципы изобретения и их практическое применение и тем самым позволить специалисту в данной области техники понять изобретение для различных вариантов осуществления и с различными модификациями, применимыми для использования по назначению.
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства

