Результат интеллектуальной деятельности: МАНИПУЛЯТОР УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
Вид РИД
Изобретение
Настоящее изобретение касается манипулятора управления транспортным средством, в частности, железнодорожным транспортным средством, и соответствующего способа маневрирования, при этом манипулятор управления содержит интегрированный элемент управления системы автоматического контроля бдительности машиниста (VACMA).
Классические устройства управления поездами или трамваями, установленные в кабинах машиниста, содержат систему автоматического контроля VACMA, при помощи которой регулярно отслеживается степень бдительности машиниста.
Машинист должен удерживать нажатым элемент управления в виде ручной кнопки или педали в течение времени от 15 до 60 секунд, затем регулярно отпускать его обычно в течение времени от 2 секунд до 5 секунд, чтобы можно было проверить, что машинист не заснул или даже не скончался, и чтобы в случае потери бдительности можно было включить аварийную остановку транспортного средства.
Известно, что такие условия работы приводят к физическому и психическому утомлению машиниста во время движения.
Чтобы улучшить эргономичность, связанную с управлением транспортным средством и с активацией системы автоматического контроля бдительности, в документе ЕР 169 0820 А было предложено интегрировать управление системой автоматического контроля бдительности в ручку управления движением в тяговом режиме и в режиме торможения в виде сенсорной клавиши.
Однако в этом документе не описана детальная геометрическая архитектура узла - ручка управления и/или сенсорная клавиша элемента управления системы автоматического контроля бдительности, обеспечивающая высокую эргономичность, то есть минимальное мышечное напряжение при усилии или согнутом состоянии машиниста.
Таким образом, технической задачей является определение эргономичной геометрической архитектуры узла, образованного ручкой управления и сенсорной клавишей, для системы VACMA.
В этой связи объектом настоящего изобретения является манипулятор управления транспортным средством, содержащий устройство обработки системы автоматического контроля бдительности машиниста и рычаг, выполненный с возможностью перемещения в заранее определенном направлении приводного действия и содержащий на конце рычага ручку внешней формы, соответствующей форме ладони руки, при этом ручка содержит:
верхнюю сторону, расположенную противоположно рычагу относительно ручки, и
по меньшей мере, одну боковую сторону, в основном перпендикулярную к верхней стороне, и
сенсорную клавишу, электрически соединенную с устройством (56) обработки системы автоматического контроля бдительности машиниста, отличающийся тем, что
сенсорная клавиша расположена на уровне боковой стороны.
Согласно частным вариантам выполнения изобретения, манипулятор управления содержит один или несколько следующих отличительных признаков:
- сенсорная клавиша расположена на уровне боковой стороны, параллельной плоскости (Р) приводного действия, содержащей направление приводного действия;
- ручка является симметричной относительно плоскости симметрии, содержащей направление приводного действия, и расстояние от сенсорной клавиши до плоскости симметрии меньше 25 мм;
- манипулятор содержит опорный элемент, относительно которого может перемещаться ручка, и ручка имеет контрольное положение, в котором рычаг расположен в виде нормали по отношению к плоскости опорного элемента, и в контрольном положении расстояние от сенсорной клавиши до опорного элемента меньше или равно 95 мм;
- сенсорная клавиша является чувствительной к прикосновениям;
- ручка содержит в основном трубчатое основание, которое выполнено вдоль оси рычага и над которым находится головка яйцевидной формы с большой осью, наклоненной по отношению к основанию;
- угол α, образованный плоскостью расширения опорного элемента и большой осью головки, находится в пределах от 5 градусов до 85 градусов;
- ручка выполнена полой, а сенсорная клавиша выполнена с возможностью электрического подсоединения внутри ручки при помощи электрического кабеля;
- рычаг выполнен полым и образует канал для электрического кабеля, соединенного с сенсорной клавишей, при этом канал является недоступным снаружи;
- устройство обработки содержит электромеханическое реле или электронный элемент, выполненный с возможностью обнаружения прохождения тока во время нажатия на сенсорную клавишу; и
- устройство обработки содержит электромеханическое реле или электронный элемент, выполненный с возможностью обнаружения отключения тока во время нажатия на сенсорную клавишу.
Объектом настоящего изобретения является также способ ручного применения описанного выше манипулятора управления, при этом манипулятор выполнен с возможностью занимать контрольное нейтральное положение N, с возможностью приведения в действие в направлении оператора в заднем положении, с возможностью приведения в действие в переднем положении, когда манипулятор приводится в действие с удалением от оператора,
отличающийся тем, что содержит следующие этапы:
- оператор прикасается к сенсорной клавише, по меньшей мере, большим или указательным пальцем, не меняя движения запястья, когда манипулятор занимает нейтральное положение или переднее положение, и
- оператор прикасается к клавише средним или безымянным пальцем, когда манипулятор приводят в действие в направлении заднего положения, при этом оператор находится в сидячем положении.
Настоящее изобретение будет более очевидно из нижеследующего описания единственного варианта выполнения, представленного исключительно в качестве примера, со ссылками на прилагаемые чертежи, на которых:
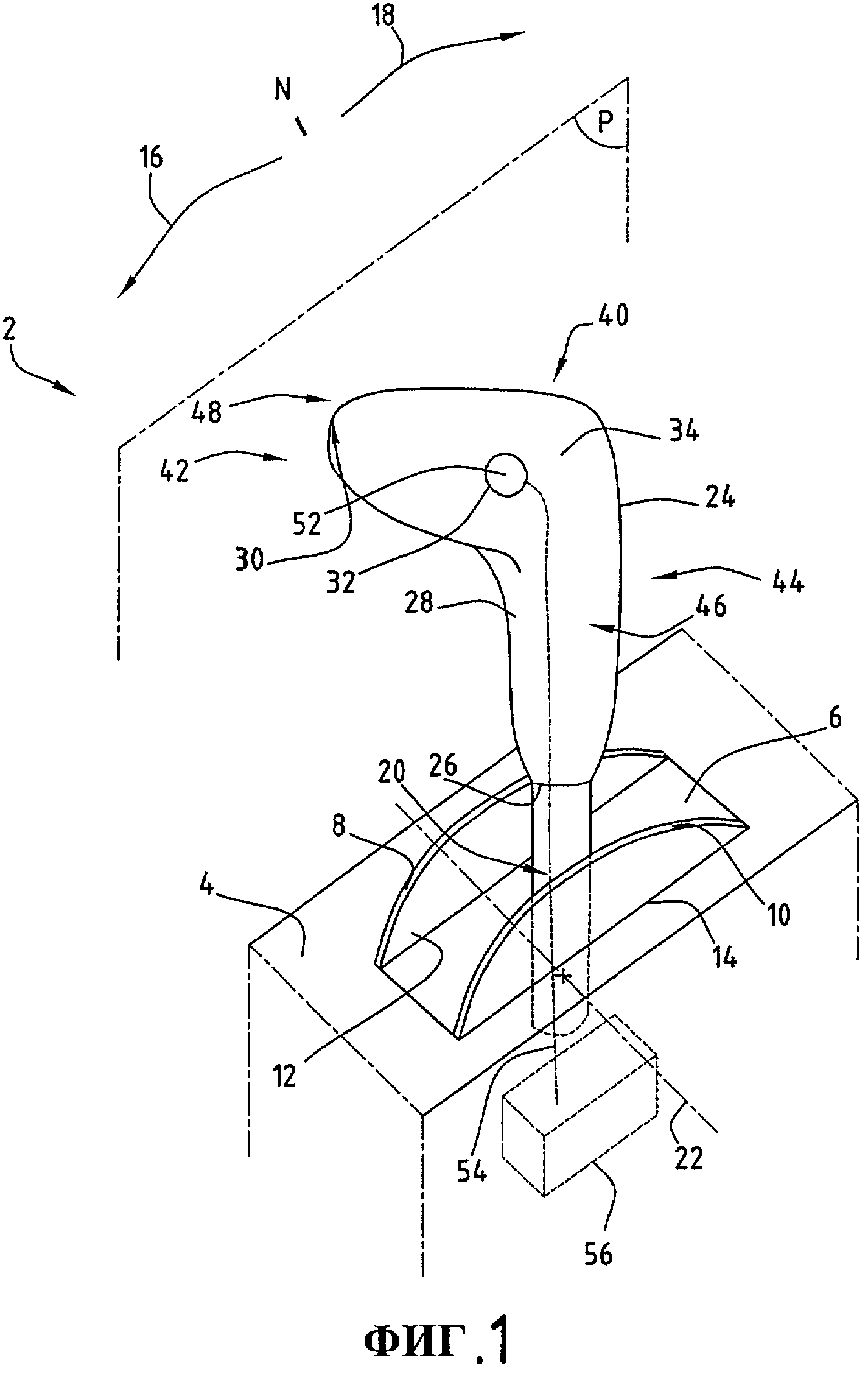
фиг.1 - вид в перспективе манипулятора управления в соответствии с настоящим изобретением;
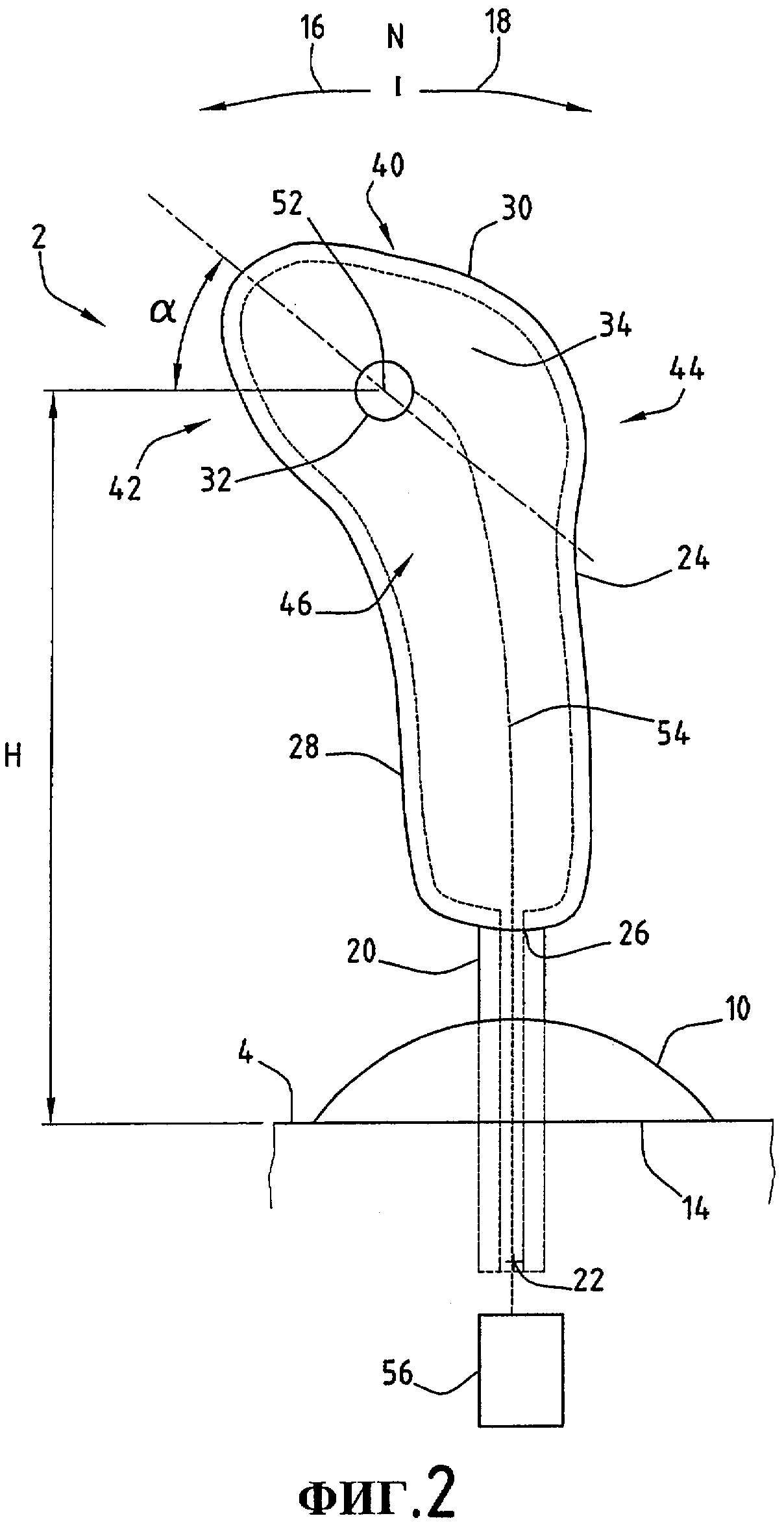
фиг.2 - вид сбоку, слева, манипулятора управления, показанного на фиг.1;
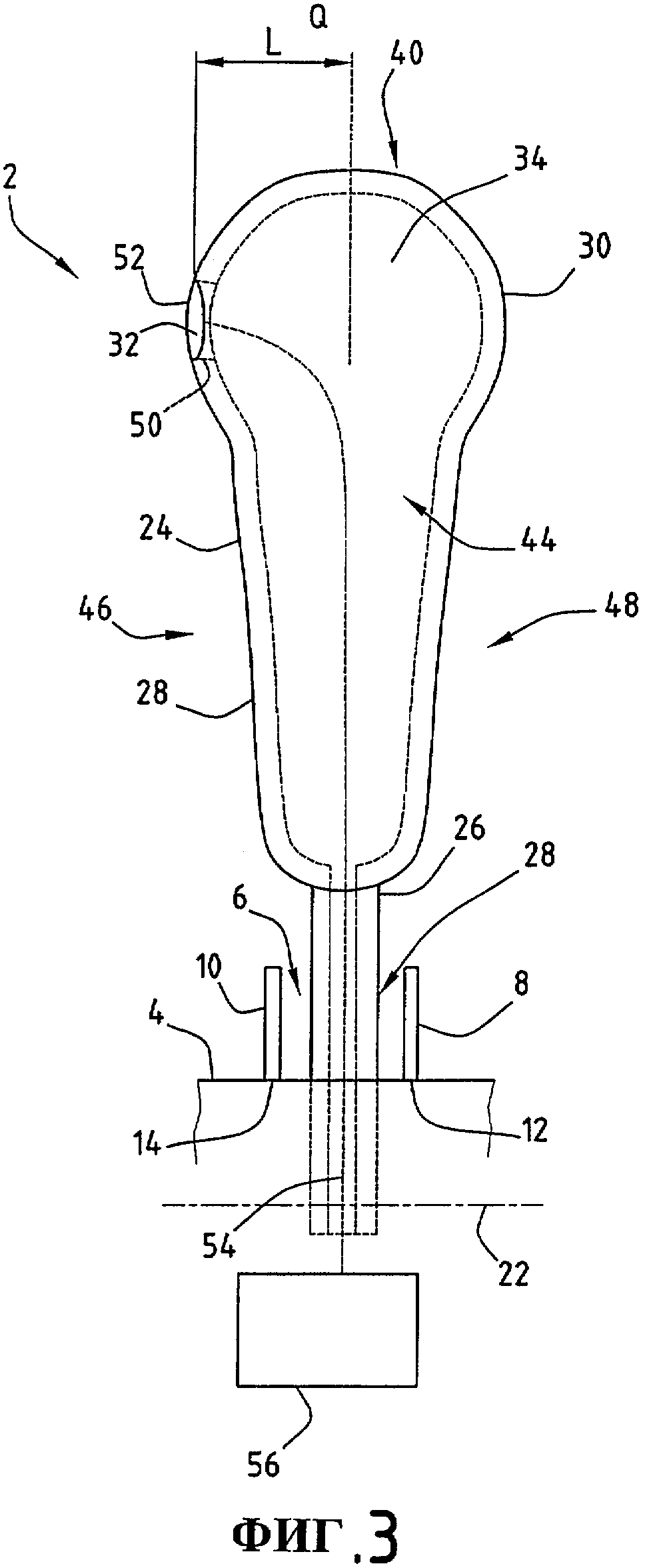
фиг.3 - вид сзади манипулятора управления, показанного на фиг.1;
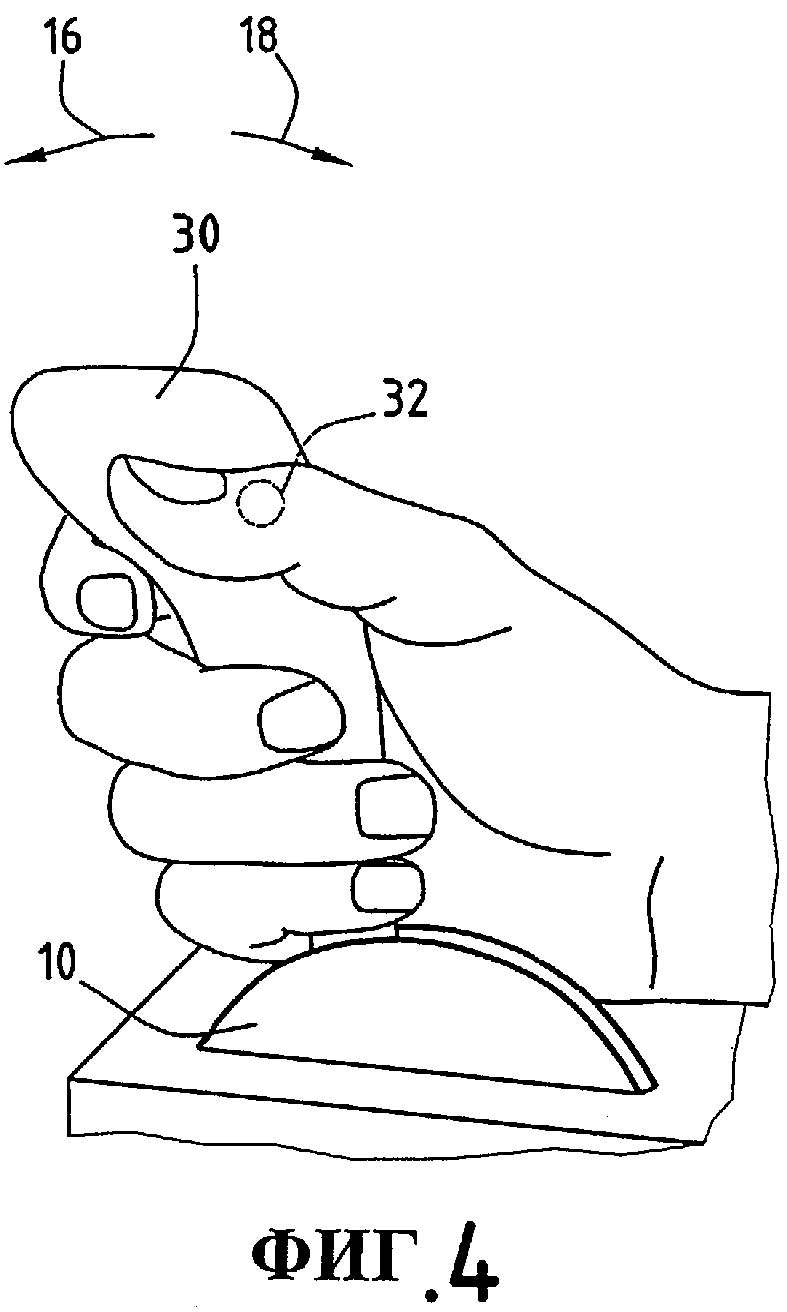
фиг.4 - вид положения руки машиниста в сидячем положении, удерживающего манипулятор во время приводного маневра или в отсутствие маневра;
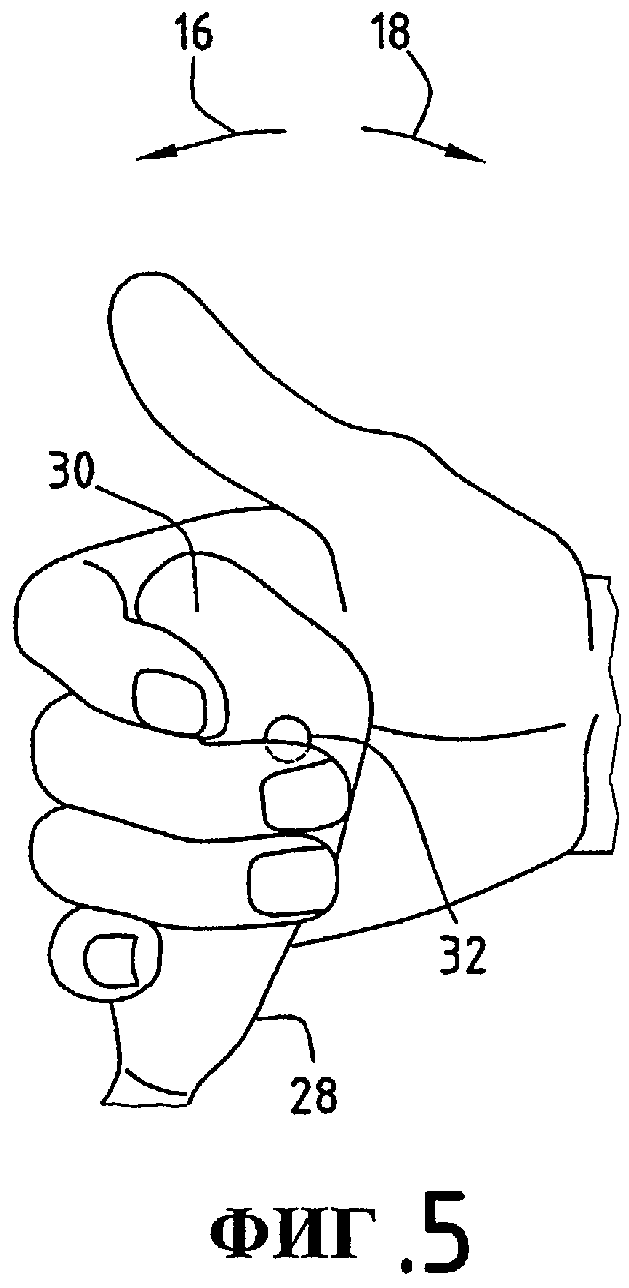
фиг.5 - вид положения руки машиниста в стоячем положении, удерживающего манипулятор во время приводного маневра в заднем направлении;
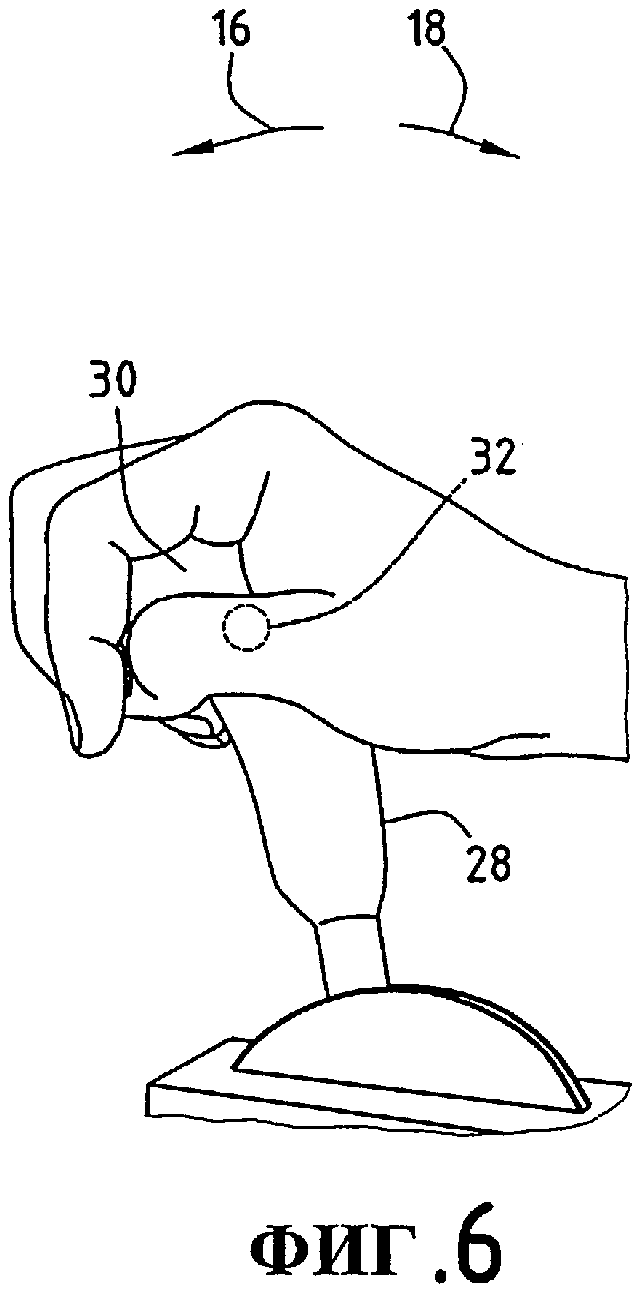
фиг.6 - вид положения руки машиниста в стоячем положении, удерживающего манипулятор во время приводного маневра в переднем направлении или в отсутствие маневра.
Манипулятор 2 управления, показанный на фиг.1, 2 и 3, установлен с возможностью перемещения относительно плоского опорного элемента 4 пульта управления, установленного в кабине машиниста.
Манипулятор 2 управления выполнен с возможностью перемещения поворотным движением в двух направлениях небольшой амплитуды, содержащихся в плоскости Р хода расширения, определенной направляющей 6.
Направляющая 6 ограничена двумя стенками 8, 10, каждая из которых образует участок диска. Каждая стенка 8, 10 содержит соответственно прямолинейный участок 14, образующий хорду соответствующего участка диска и опирающийся на опорный элемент 4.
Переднее и, соответственно, заднее направление движения, показанные стрелкой 16, соответственно стрелкой 18, соответствуют направлению приведения в действие манипулятора при тяговом движении транспортного средства, соответственно при торможении транспортного средства, при этом определено промежуточное нейтральное положение N, соответствующее отсутствию маневра управления движением.
Манипулятор 2 управления содержит рычаг 20, выполненный с возможностью поворота вокруг оси 22 относительно опорного элемента 4, и ручку 24, посаженную на конец 26 рычага 20, находящийся со стороны двух стенок 8, 10 направляющей 8.
Ручка 24 содержит в основном цилиндрическое основание 28, расположенное вдоль оси рычага 20, в которое заходит конец 26. Кроме того, она содержит головку 30 яйцевидной формы, выполненную над основанием и наклоненную относительно последнего, и сенсорную клавишу 32, чувствительную к прикосновениям.
Угол α, показанный на фиг.2, образованный плоскостью расширения опорного элемента 4 и большой осью головки 30 яйцевидной формы, находится в пределах от 5 градусов до 85 градусов.
Ручка 24 содержит твердую оболочку 34 с пятью сторонами 40, 42, 44, 46, 48, а именно верхней стороной 40 головки 30, передней боковой стороной 42, ориентированной в переднем направлении 16 перемещения, задней боковой стороной 44, ориентированной в заднем направлении 18 перемещения, левой боковой стороной 46, расположенной слева, если смотреть в переднем направлении 16, правой боковой стороной 48, расположенной справа, если смотреть в переднем направлении 16.
Левая и правая боковые стороны 46, 48 являются симметричными относительно плоскости Q симметрии, параллельной плоскости Р перемещения и в данном случае с ней совпадающей.
Стороны 40, 42, 44, 46, 48 являются правильными поверхностями, гладко сопрягающимися через закругления.
По своей форме верхняя сторона 40 головки выполнена с возможностью плоского касания ладонью руки и с возможностью охвата на своей части, сопряженной с передней боковой стороной 42, пальцами той же руки, в частности, указательным пальцем, средним пальцем и мизинцем.
По своей форме на части головки 30, сопряженной с верхней стороной 40, задняя сторона 44 выполнена с возможностью перемещения толкающим движением вперед при помощи ладони руки.
По своей форме на части головки 30, сопряженной с верхней стороной 40, передняя сторона 42 выполнена с возможностью перемещения тянущим движением при помощи пальцев, в частности указательного пальца назад, и с возможностью охвата на своей части у основания 28 пальцами, в частности средним пальцем и мизинцем.
Сенсорная клавиша 32, чувствительная к прикосновениям, расположена в отверстии 50, выполненном в твердой оболочке 34, образующей несущую конструкцию ручки 24, и неразъемно закреплена на оболочке 34.
Сенсорная клавиша 32 содержит неподвижную сенсорную поверхность 52, выполненную заподлицо с краем отверстия 50, образующим кромку вместе с левой боковой стороной 46 ручки 24.
Предпочтительно сенсорную клавишу 32 располагают на уровне левой боковой стороны 46 или правой боковой стороны 48 ручки.
Случай расположения сенсорной клавиши 32 на уровне левой боковой стороны 46, соответственно на уровне правой боковой стороны 48, соответствует показанному на фиг.1 случаю положения машиниста слева от манипулятора, которым он в этом случае управляет правой рукой, и соответственно не показанному случаю положения машиниста справа от манипулятора, который он в этом случае приводит в действие левой рукой.
В варианте сенсорную клавишу 32 располагают на уровне передней боковой стороны 42 или задней боковой стороны 44.
Сенсорная клавиша 32 находится на расстоянии L от плоскости Q симметрии, меньшем или равном 25 мм.
Расстояние Н от сенсорной клавиши до плоскости опорного элемента меньше или равно 95 мм.
Сенсорная клавиша 32 соединена электрически при помощи электрического кабеля 54 с устройством 56 обработки системы автоматического контроля бдительности машиниста.
Рычаг 20 и ручка 24 выполнены полыми и образуют канал для электрического кабеля 54, соединенного с сенсорной клавишей 32, при этом канал оказывается недоступным снаружи, когда манипулятор устанавливают на опорном элементе.
Манипулятор 2 выполнен с возможностью демонтажа с опорного элемента 4.
Система 60 автоматического контроля бдительности в соответствии с настоящим изобретением содержит описанный выше манипулятор 2 управления и устройство 56 обработки системы автоматического контроля бдительности VACMA.
Таким образом, доступ к чувствительным элементам системы автоматического контроля бдительности машиниста, когда она установлена, то есть к сенсорной клавише 32, к электрическому кабелю 54 и к устройству 56 обработки, защищен, и любая попытка блокировки системы 60 контроля являются невозможными.
В варианте сенсорную клавишу 32 соединяют с радиочастотным передатчиком, и устройство 56 обработки содержит радиочастотный приемник, выполненный с возможностью приема сигналов, излучаемых радиочастотным передатчиком.
Сенсорная клавиша 32 образует конденсатор, неподвижная сенсорная поверхность 52 которого образует его обкладку, при этом конденсатор имеет емкость, изменяющуюся в зависимости от наличия или отсутствия контакта между кожей пальца и сенсорной поверхностью 52 клавиши 32.
Контакт устанавливается, как только палец касается или как только палец нажимает на клавишу 32 с небольшим давлением, но не деформируя последнюю.
Изменение емкости классически измеряют путем подачи переменного напряжения на контакты конденсатора через кабель 54 от источника переменного напряжения, интегрированного в устройство обработки, при помощи измерения тока, проходящего через последовательно соединенное сопротивление, представленное конденсатором.
Устройство 56 обработки содержит электромеханическое реле или электронный элемент, например транзистор, выполненный с возможностью обнаружения прохождения тока во время нажатия на сенсорную клавишу 32.
В варианте выполнения устройство 56 обработки содержит электромеханическое реле или электронный элемент, например, транзистор, выполненный с возможностью обнаружения отключения тока во время нажатия на сенсорную клавишу.
Устройство 56 обработки выполнено с возможностью отслеживания соблюдения машинистом режима VACMA и проверки, чтобы сенсорная клавиша регулярно входила в контакт, по меньшей мере, с одним из пальцев в течение времени от 15 до 60 секунд с последующим отпусканием в течение времени, обычно составляющего от 2 до 5 секунд. Таким образом, проверяют, чтобы машинист не заснул и даже не скончался и чтобы в случае потери бдительности можно было включить аварийную остановку транспортного средства.
На фиг.4 показан маневр управления в переднем направлении манипулятора 2, во время которого машинист транспортного средства находится в сидячем положении и приводит в действие манипулятор 2 своей правой рукой.
В этой конфигурации рука толкает ручку 24 выемкой большого пальца, тогда как фаланги среднего пальца, безымянного пальца и мизинца охватывают основание ручки.
Активация сенсорной клавиши 32 системы VACMA происходит естественным путем при помощи конечной фаланги большого пальца, который с минимальным усилием нажимает на клавишу. Точно так же отпускание клавиши происходит с минимальным мышечным усилием.
Одновременное осуществление маневра управления в переднем направлении и активация системы автоматического контроля бдительности тоже происходит без дополнительного усилия, так как не требуется никакого вращательного движения запястья, при этом плоскость, образованная ручкой, находится на одной линии с плоскостью Р хода манипулятора.
Эта конфигурация является также эргономичной и применяется в случае маневра в заднем направлении.
Руку располагают таким же образом относительно ручки 24, и только часть, производящая усилие приведения в действие, отличается тем, что задние фаланги среднего пальца, безымянного пальца и мизинца производят толкающее усилие на ручку в заднем направлении.
Эта конфигурация тоже является эргономичной и применяется в случае отсутствия маневра в нейтральном положении N манипулятора.
На фиг.4 показан маневр управления манипулятора 2 в переднем направлении, во время которого машинист находится в сидячем положении и приводит в действие манипулятор своей правой рукой.
В этой конфигурации рука толкает ручку выемкой большого пальца, тогда как фаланги среднего пальца, безымянного пальца и мизинца охватывают основание ручки.
Активацию сенсорной клавиши 32 системы VACMA производят естественным путем при помощи конечной фаланги большого пальца, которая минимальным усилием давит на клавишу. Точно так же отпускание клавиши происходит с минимальным мышечным усилием.
Одновременное осуществление маневра управления в переднем направлении и активация системы автоматического контроля бдительности тоже происходят без дополнительного усилия, так как не требуется никакого вращательного движения запястья, при этом плоскость, образованная ручкой, находится на одной линии с плоскостью Р хода манипулятора.
Эта конфигурация является также эргономичной и применяется в случае маневра в заднем направлении.
Руку располагают таким же образом относительно ручки, и только часть, производящая усилие приведения в действие, отличается тем, что задние фаланги среднего пальца, безымянного пальца и мизинца действуют толкающим усилием на ручку в заднем направлении.
Эта конфигурация тоже является эргономичной и применяется в случае отсутствия маневра в нейтральном положении N манипулятора.
На фиг.5 показан маневр управления манипулятора 2 в заднем направлении, во время которого машинист находится в стоячем положении и приводит в действие манипулятор своей правой рукой.
В этой конфигурации рука толкает ручку назад фалангами указательного пальца, задними фалангами среднего пальца и безымянного пальца, тогда как большой палец отводится от головки ручки назад и вверх. Фаланги указательного пальца, безымянного пальца и мизинца охватывают основание ручки.
Активацию сенсорной клавиши 32 системы VACMA производят естественным путем при помощи конечной фаланги среднего пальца, которая минимальным усилием давит на клавишу. Точно так же отпускание клавиши происходит с минимальным мышечным усилием.
Одновременное осуществление маневра управления в заднем направлении и активация системы автоматического контроля бдительности тоже происходят без дополнительного усилия, так как не требуется никакого вращательного движения запястья, при этом плоскость, образованная ручкой, находится на одной линии с плоскостью Р хода манипулятора.
На фиг.6 показан маневр управления в переднем направлении 16 манипулятора 2, во время которого машинист находится в стоячем положении и приводит в действие манипулятор своей правой рукой.
В этой конфигурации рука толкает ручку 24 выемкой большого пальца и подушечками пальцев, при этом все фаланги пальцев, кроме большого пальца, накрывают головку 30 ручки 24 по верхней стороне 40, а фаланги большого пальца охватывают основание 28 ручки 24.
Активацию сенсорной клавиши 32 системы VACMA производят естественным путем при помощи задней фаланги большого пальца, которая минимальным усилием давит на сенсорную клавишу 32. Точно так же отпускание клавиши 32 происходит с минимальным мышечным усилием.
Одновременное осуществление маневра управления в заднем направлении и активация системы автоматического контроля бдительности тоже происходят без дополнительного усилия, так как не требуется никакого вращательного движения запястья, при этом плоскость, образованная ручкой, находится на одной линии с плоскостью верхней стороны с небольшим переломом, что соответствует состоянию покоя запястья.
Эта конфигурация тоже является эргономичной и применяется в случае отсутствия маневра в нейтральном положении N манипулятора.
Как показано на фиг.1, 2, 3, 4, 5, 6, сенсорная клавиша 32 расположена на головке 30 яйцевидной формы на уровне одной из двух боковых сторон, в данном случае на уровне боковой стороны 46, параллельной плоскости Р приводного действия, содержащей направления 14, 16 приводного действия и большую ось головки 30, показанную на фиг.2 пунктирной линией.
Ось, проходящая через сенсорную клавишу 32 перпендикулярно к боковой стороне 46, на уровне которой она расположена, пересекает плоскость Р приводного действия в ближней точке, которая даже может принадлежать большой оси головки 30 яйцевидной формы.
Таким образом, во время перехода руки между режимом управления, описанным со ссылками на фиг.6, в котором ладонь руки располагают на верхней стороне 40, и режимом управления, описанным со ссылками на фиг.4, в котором ладонь толкает или фаланги тянут манипулятор, большой палец руки остается в эргономичном контакте с сенсорной клавишей 32, не отходя от нее во время перехода. Вращательное движение запястья, необходимое во время этого перехода, является минимальным движением с точки зрения хода и усилия.
Электрическое устройство аварийного торможения с приводом с постоянными магнитами и с регулированием тормозного момента
Железнодорожный вагон с системой кондиционирования воздуха, расположенной на потолке
Способ сборки магнитного полюса и соответствующего ротора
Устройство и схема управления силовым электронным компонентом, соответствующие способ управления и пусковое устройство
Железнодорожный вагон с облегченным доступом для пассажиров с ограниченными физическими возможностями
Железнодорожная шпала
Гофрированное сочленение для прохода между вагонами железнодорожного транспортного средства
Средство турбулизации воздушного потока под каркасом железнодорожного вагона
Железнодорожный поезд с вспомогательной сетью электрического питания
Каркас железнодорожного вагона с теплоизоляционными панелями
Электрическое устройство аварийного торможения с приводом с постоянными магнитами и с регулированием тормозного момента
Железнодорожный вагон с системой кондиционирования воздуха, расположенной на потолке
Способ сборки магнитного полюса и соответствующего ротора
Устройство и схема управления силовым электронным компонентом, соответствующие способ управления и пусковое устройство
Железнодорожный вагон с облегченным доступом для пассажиров с ограниченными физическими возможностями
Железнодорожная шпала
Гофрированное сочленение для прохода между вагонами железнодорожного транспортного средства
Средство турбулизации воздушного потока под каркасом железнодорожного вагона
Железнодорожный поезд с вспомогательной сетью электрического питания
Каркас железнодорожного вагона с теплоизоляционными панелями

