Результат интеллектуальной деятельности: СПОСОБ ЗАЩИТЫ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ В ВИДЕ СКОПЛЕНИЙ ОБНАРУЖЕННЫХ СИГНАЛОВ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Заявляемые технические решения относятся к области радиолокации, в частности к области защиты обзорных радиолокационных станций (РЛС) от пассивных помех в виде скоплений обнаруженных сигналов, например, в областях подрывов зенитных ракет.
Известен способ защиты от пассивных помех, основанный на селекции движущейся цели (СДЦ) за счет различия радиальной скорости цели и источников пассивных помех. В этом способе подавляются принятые сигналы, мало изменяющиеся от периода к периоду (отраженные от неподвижных и медленно движущихся объектов), и выделяются сигналы, изменяющиеся более значительно (отраженные от движущихся целей) (Теоретические основы радиолокации. Под ред. В.Е. Дулевича. - М., Сов. радио, 1978, с.464-484).
Известная РЛС, реализующая известный способ защиты от пассивных помех, содержит устройство СДЦ, включающее схему синхронизации, схему дифференциальной автоматической регулировки усиления, два усилителя, два амплитудных детектора, схему вычитания (Теоретические основы радиолокации. Под ред. В.Е. Дулевича. - М., Сов. радио, 1978, с.469-473).
Известные технические решения позволяют обеспечить защиту РЛС от пассивных помех в виде скоплений обнаруженных сигналов, однако применительно к обзорным РЛС имеют следующий недостаток.
Недостаток известных технических решений состоит в том, что в каждом направлении луча требуется излучать несколько зондирующих сигналов. Поскольку времени (количества зондирований) для защиты таким способом всей зоны обзора в обзорных РЛС нет, то СДЦ в них применяют, как правило, только в нижней части зоны обзора и на ограниченной дальности. Так как пассивные помехи при подрывах зенитных ракет могут наблюдаться на разных высотах, то применение СДЦ для защиты от таких помех во всей зоне обзора в рассматриваемых РЛС оказывается невозможным.
Наиболее близким к заявляемому является способ защиты обзорной РЛС от пассивных помех в виде скоплений обнаруженных сигналов, включающий анализ оператором РЛС плотности сигналов, обнаруженных в зоне обзора РЛС, определение и установление границ областей бланкирования оператором РЛС и бланкирование обнаруженных сигналов в пределах упомянутых границ, обнаружение и сопровождение траекторий целей за пределами упомянутых областей (Ангельский Р.Д., Шестов И.В. Отечественные зенитные ракетные комплексы: Иллюстрированный справочник / Р.Д. Ангельский. - М.: ООО «Издательство Астрель»: ООО «Издательство ACT», 2002. - 256 с.: ил. - (Военная техника), с.150-151).
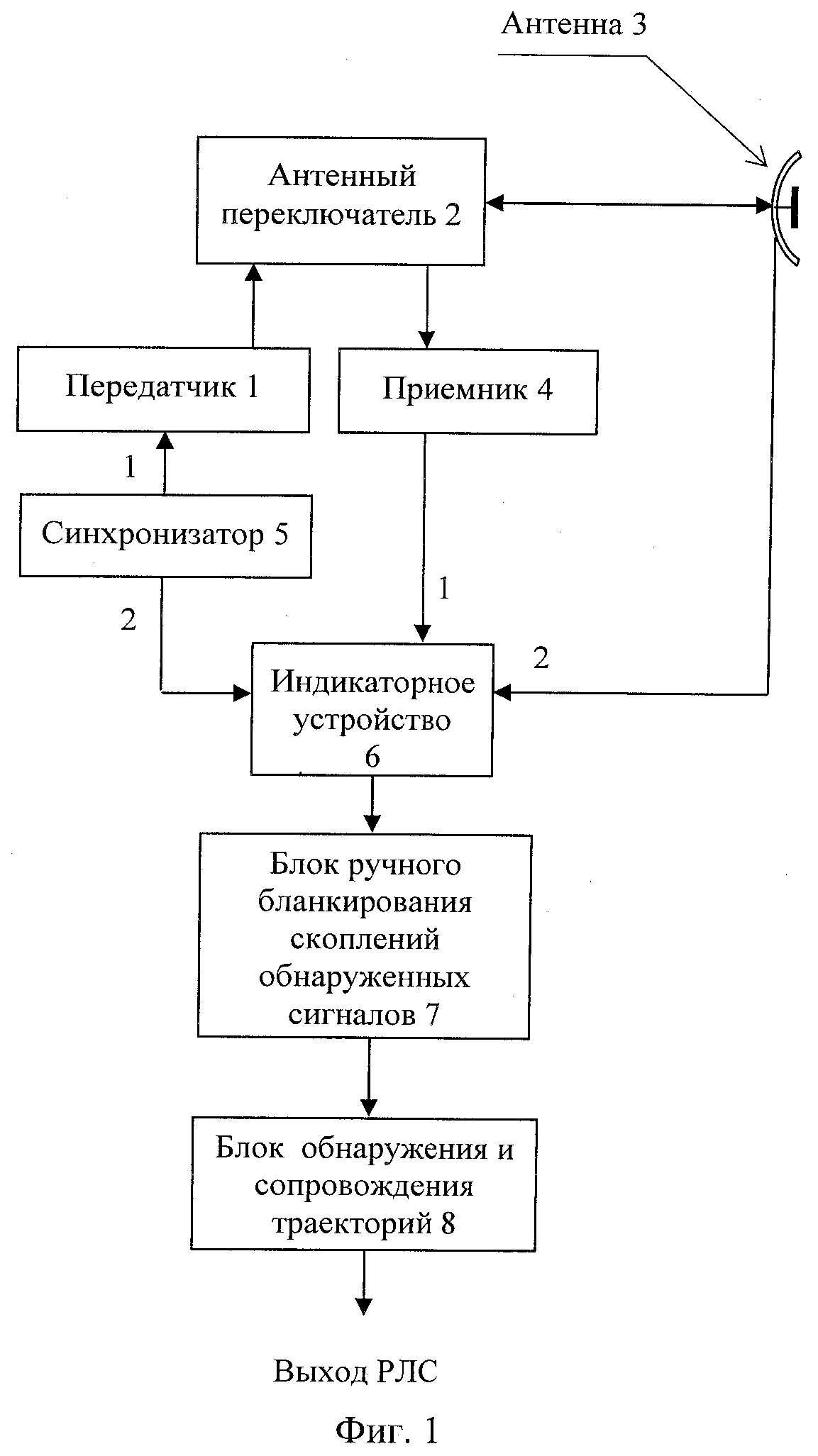
Наиболее близкой по технической сущности к заявляемой является РЛС (фиг.1), содержащая передатчик 1, антенный переключатель 2, антенну 3, приемник 4, синхронизатор 5, индикаторное устройство 6, блок ручного бланкирования скоплений обнаруженных сигналов 7, блок обнаружения и сопровождения траекторий 8, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход приемника 4 и координатный выход антенны 3 соединены соответственно с первым и вторым входами индикаторного устройства 6, выход которого соединен со входом блока ручного бланкирования скоплений обнаруженных сигналов 7, выход которого соединен со входом обнаружения и сопровождения траекторий 8, первый и второй выходы синхронизатора 5 соединены соответственно с синхровходами передатчика 1 и индикаторного устройства 6 соответственно (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. - М., Сов. радио, 1970, с.221, рис.5.4).
Работа РЛС, наиболее близкой к заявляемой, происходит следующим образом. В передатчике 1 по командам синхронизатора 5 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные сигналы принимаются антенной 3, поступают в приемник 4, где производится их обнаружение и усиление. Сигналы с выхода приемника 4 и сигналы с координатного выхода антенны 3, пропорциональные угловым координатам луча антенны 3, поступают соответственно на первый и второй входы индикаторного устройства 6, где отображаются. Оператор РЛС наблюдает радиолокационную обстановку на экране индикаторного устройства 6, визуально выделяет области скопления обнаруженных сигналов, «на глаз» определяет границы областей бланкирования и выдает их в блок ручного бланкирования скоплений обнаруженных сигналов 7. По отраженным сигналам, обнаруженным за пределами областей бланкирования, в блоке обнаружения и сопровождения траекторий 8 производится обнаружение и сопровождение траекторий целей. Сигналы, обнаруженные в пределах областей бланкирования, на вход блока обнаружения и сопровождения траекторий 8 не поступают. Траектории целей с выхода блока обнаружения и сопровождения траекторий 8 выдаются потребителю радиолокационной информации (РЛИ).
В связи с тем, что в наиболее близких технических решениях границы областей бланкирования скоплений обнаруженных сигналов определяются оператором РЛС, этим техническим решениям присущи следующие недостатки.
Во-первых, границы области бланкирования устанавливаются с задержкой на 2-3 периода обзора. Это объясняется тем, что для оценки радиолокационной обстановки и на основе этой оценки установления границ области бланкирования оператору требуется время. А поскольку в системе обнаружения и сопровождения траекторий траектории формируются по мере поступления информации, то задержка с установлением границ области бланкирования приводит к тому, что сразу же после подрыва зенитной ракеты и образования скоплений обнаруженных сигналов начинается формирование в этой области большого количества ложных траекторий, в результате чего происходит перегрузка системы обнаружения и сопровождения траекторий, и выдача информации по целям за пределами области скопления может прекратиться.
Во-вторых, границы областей бланкирования определяются оператором РЛС весьма приблизительно, то есть они, как правило, значительно отличаются от реальных границ областей скопления обнаруженных сигналов. Это приводит к тому, что траектории целей оказываются либо пропущенными (когда область бланкирования значительно больше области скопления обнаруженных сигналов), либо начинает формироваться большое количество ложных траекторий (когда область бланкирования не охватывает область скопления обнаруженных сигналов).
Таким образом, недостатками наиболее близких технических решений является задержка в определении и установлении границ областей бланкирования скопления обнаруженных сигналов и перегрузка вследствие этого системы обнаружения и сопровождения траекторий, а также неточное определение границ областей бланкирования скопления обнаруженных сигналов и вследствие этого недостоверное формирование траекторий целей за пределами областей бланкирования.
Решаемой задачей (техническим результатом), таким образом, является сокращение задержки в определении и установлении границ областей бланкирования скоплений обнаруженных сигналов, повышение точности определения этих границ и увеличение достоверности обнаружения траекторий целей за пределами областей бланкирования.
Указанный технический результат достигается тем, что в способе защиты обзорной РЛС от пассивных помех в виде скоплений обнаруженных сигналов, включающем анализ плотности сигналов, обнаруженных в зоне обзора РЛС, определение и установление границ областей бланкирования, обнаружение и сопровождение траекторий целей за пределами упомянутых областей, согласно изобретению
- определяют границы областей бланкирования, в которых плотность обнаруженных сигналов, вычисляемая в «скользящем окне» размерами, равными размерам строба захвата траектории, выше порогового значения, выбранного исходя из максимального количества траекторий, которые могут одновременно сопровождаться системой обнаружения и сопровождения траекторий;
- за пределами областей бланкирования, где плотность обнаруженных сигналов ниже пороговой, осуществляют обнаружение и сопровождение траекторий целей, для которых курсовая скорость, определяемая на этапе обнаружения траектории, не превышает заданное пороговое значение, а вектор курсовой скорости, также определяемый на этапе обнаружения траектории, отличается от вертикального направления на величину, превышающую заданное пороговое значение, указанные пороговые значения определяют для заданного для РЛС класса целей исходя соответственно из максимальной скорости целей на данной высоте и из вида траекторий.
Указанный технический результат достигается также тем, что в радиолокационной станции, содержащей передатчик, антенный переключатель, антенну, приемник, синхронизатор, блок обнаружения и сопровождения траекторий, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, первый выход синхронизатора соединен с синхровходом передатчика, выход блока обнаружения и сопровождения траекторий является выходом РЛС, согласно изобретению введены запоминающее устройство обнаруженных сигналов и блок автоматического бланкирования скоплений обнаруженных сигналов, при этом первый и второй входы запоминающего устройства обнаруженных сигналов соединены соответственно с выходом приемника и координатным выходом антенны, синхровход запоминающего устройства соединен со вторым выходом синхронизатора, Nc выходов запоминающего устройства обнаруженных сигналов соединены с Nc входами блока автоматического бланкирования скоплений обнаруженных сигналов, Nc выходов которого соединены с Nc входами блока обнаружения и сопровождения траекторий, величина Nc выбирается равной максимальному количеству сигналов, которые могут быть обнаружены в стробе обнаружения траектории, выход блока обнаружения и сопровождения траекторий является выходом РЛС.
Суть заявляемых технических решений заключается в следующем.
Известно, что при поражении цели зенитной ракетой образуется большое количество фрагментов - источников пассивных помех. Отраженные от этих фрагментов сигналы обнаруживаются РЛС в виде скоплений обнаруженных сигналов. По этим скоплениям системой обнаружения и сопровождения траекторий формируется чрезвычайно большое количество траекторий, которые не являются траекториями целей, то есть являются ложными. Тем не менее эти траектории обнаруживаются и сопровождаются, перегружая систему обнаружения и сопровождения траекторий.
Как уже отмечалось, в прототипе оператор РЛС определяет границы областей бланкирования скоплений пассивных помех по визуальной информации, отображаемой на индикаторе обзора, в связи чем известные технические решения имеют следующие недостатки: во-первых, границы области бланкирования устанавливаются с задержкой на 2-3 периода обзора, во-вторых, границы областей бланкирования определяются весьма приблизительно.
В изобретении определение и установление границ областей бланкирования проводятся автоматически в процессе регулярного осмотра зоны обзора в «скользящем окне» размерами, равными размерам строба захвата траектории.
«Скользящее окно» представляет из себя трехмерную область, перемещающуюся подискретно по зоне обзора. При этом в каждом положении «скользящего окна» рассчитывается плотность обнаруженных сигналов, которая сравнивается с пороговым значением, устанавливаемым исходя из количества траектории, которые могут одновременно обнаруживаться и сопровождаться системой обнаружения и сопровождения траекторий. Если плотность обнаруженных сигналов в «скользящем окне» превышает пороговое значение, то соответствующая область зоны обзора считается областью скопления обнаруженных сигналов и обнаруженные в этой области сигналы бланкируются, то есть по этим сигналам обнаружение и сопровождение траекторий не производится.
Таким образом устраняется задержка в определении и установлении границ области бланкирования и обеспечивается достаточная точность их определения.
Для увеличения достоверности обнаружения траекторий целей за пределами областей скопления обнаруженных сигналов в изобретении осуществляют обнаружение и сопровождение траекторий только тех целей, для которых курсовая скорость, определяемая на этапе обнаружения траектории, не превышает пороговое значение, соответствующее максимальной скорости заданного для РЛС класса целей на данной высоте. Это означает, что не будут обнаруживаться и сопровождаться траектории целей, скорости которых не соответствуют типам целей, заданным для РЛС, а также, что наиболее вероятно, не будут обнаруживаться и сопровождаться траектории, сформированные по фрагментам зенитной ракеты или пораженного ею объекта, движущимся под действием взрывной волны с нереальными для цели курсовыми скоростями.
Также для увеличения достоверности обнаружения траекторий целей в изобретении за пределами областей скопления обнаруженных сигналов осуществляют обнаружение и сопровождение траекторий целей, для которых вектор курсовой скорости, определяемый на этапе обнаружения траектории, отличается от вертикального направления на величину, превышающую пороговое значение, соответствующее заданному для РЛС классу целей. Это означает, что не будут обнаруживаться и сопровождаться траектории, вид которых не соответствует типам целей, заданным для РЛС, а также, что наиболее вероятно, не будут обнаруживаться и сопровождаться траектории, сформированные по фрагментам зенитной ракеты или пораженного ею объекта, движущимся под действием взрывной волны в нереальном для цели направлении.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами:
фиг.1 - блок-схема РЛС, наиболее близкой к заявляемой РЛС;
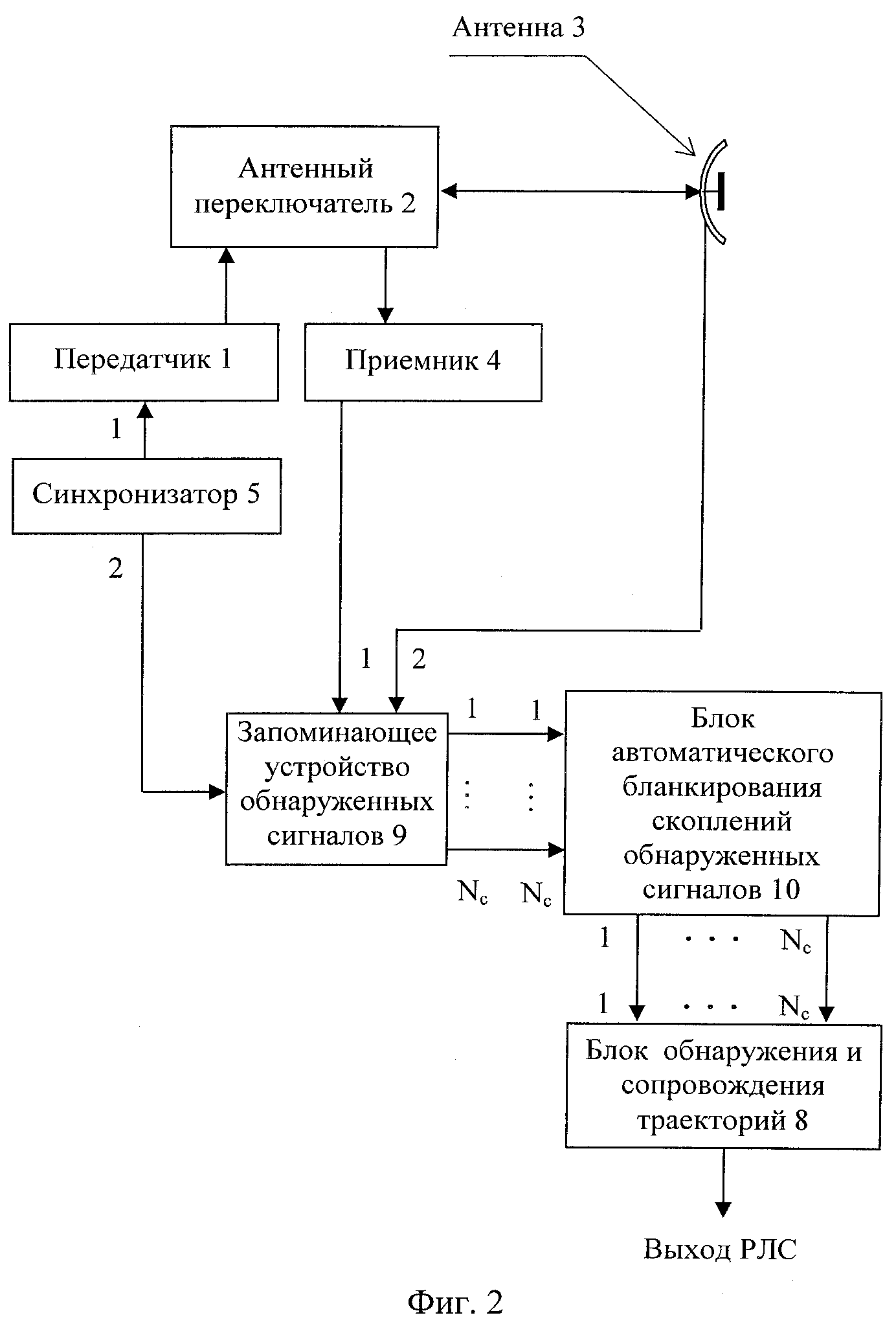
фиг.2 - блок-схема заявляемой РЛС.
Заявляемый способ реализован в РЛС, изображенной на фиг.2 и содержащей передатчик 1, антенный переключатель 2, антенну 3, приемник 4, синхронизатор 5, блок обнаружения и сопровождения траекторий 8, запоминающее устройство обнаруженных сигналов 9, блок автоматического бланкирования скоплений обнаруженных сигналов 10, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход приемника 4 и координатный выход антенны 3 соединены соответственно с первым и вторым входами запоминающего устройства обнаруженных сигналов 9, Nc выходов которого соединены с Nc входами блока автоматического бланкирования скоплений обнаруженных сигналов 10, Nc выходов которого соединены с Nc входами блока обнаружения и сопровождения траекторий 8, первый и второй выходы синхронизатора 5 соединены с синхровходами передатчика 1 и запоминающего устройства обнаруженных сигналов 9 соответственно, выход блока обнаружения и сопровождения траекторий 8 является выходом РЛС.
Количество выходов запоминающего устройства обнаруженных сигналов 9, количество входов и выходов блока автоматического бланкирования скоплений обнаруженных сигналов 10, количество входов блока обнаружения и сопровождения траекторий 8, то есть значение величины Nc, задают равным максимальному количеству сигналов, которые могут быть обнаружены в стробе обнаружения траектории.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М., Сов. радио, 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Синхронизатор 5 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М., Сов. радио, 1970, с.602-603).
Блок обнаружения и сопровождения траекторий 8 - цифровой вычислитель, реализующий операции обнаружения и сопровождения траекторий (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., Сов. радио, 1974, с.285-287). В этом блоке на этапе обнаружения траектории осуществляется также анализ курсовой скорости и направления движения цели. Траектории целей, для которых курсовая скорость не превышает заданное пороговое значение, а вектор курсовой скорости отличается от вертикального направления на величину, превышающую заданное пороговое значение, с выхода этого блока выдаются потребителю РЛИ. Указанные пороговые значения определяют для заданного для РЛС класса целей исходя соответственно из максимальной скорости целей на данной высоте и из вида траекторий.
Запоминающее устройство обнаруженных сигналов 9 выполнено на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М., Радио и связь, 1984).
Блок автоматического бланкирования скоплений обнаруженных сигналов 10 - цифровой вычислитель реализует функцию определения границ области бланкирования, в которой плотность обнаруженных сигналов, вычисляемая в «скользящем окне» размерами, равными размерам строба захвата траектории, выше порогового значения, выбранного исходя из максимального количества траекторий, которые могут одновременно сопровождаться системой обработки радиолокационной информации, а также функцию бланкирования сигналов, обнаруженных в пределах областей бланкирования (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М., Радио и связь, 1984).
Работа заявляемой РЛС происходит следующим образом. В передатчике 1 по командам синхронизатора 5 (импульсам синхронизации) формируются зондирующие сигналы, которые с помощью антенны 3 излучаются в пространство. Отраженные сигналы принимаются антенной 3, поступают в приемник 4, где сравниваются с порогом обнаружения. Обнаруженные сигналы с выхода приемника 4 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают соответственно на первый и второй входы запоминающего устройства обнаруженных сигналов 9, где по мере регулярного обзора зоны РЛС запоминаются. Данные, хранящиеся в запоминающем устройстве обнаруженных сигналов 9, по командам с синхронизатора 5 подаются в блок автоматического бланкирования скоплений обнаруженных сигналов 10, где в процессе регулярного обзора зоны РЛС определяются границы области бланкирования. При этом в «скользящем окне» размерами, равными размерам строба захвата траектории, вычисляется плотность обнаруженных сигналов, которая сравнивается с заданным пороговым значением. При превышении порогового значения соответствующая область зоны обзора считается принадлежащей области бланкирования. Отраженные сигналы, обнаруженные в пределах областей бланкирования, на вход блока обнаружения и сопровождения траекторий 8 не подаются. Отраженные сигналы, обнаруженные за пределами областей бланкирования, с выхода блока автоматического бланкирования скоплений обнаруженных сигналов 10 поступают в блок обнаружения и сопровождения траекторий 8, где осуществляется обнаружение новых и сопровождение ранее обнаруженных траекторий. В этом блоке осуществляется также анализ курсовой скорости и направления движения цели. Траектории целей, для которых курсовая скорость не превышает заданного порогового значения, а вектор курсовой скорости отличается от вертикального направления на величину, превышающую заданное пороговое значение, выдаются потребителю РЛИ.
Таким образом достигается заявляемый технический результат.
Способ радиолокационного обзора
Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления
Способ радиолокационного обзора
Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления
Способ измерения угловых координат цели
Способ распознавания отраженных сигналов от цели и сигналов ответной импульсной помехи
Конструкция наблюдательной геоэкологической скважины для отбора проб воздуха
Способ определения координат источника радиоизлучения (варианты) и радиолокационная станция для его реализации
Способ измерения угловых координат объекта и радиолокационная станция для его реализации
Способ осмотра зоны обзора и радиолокационная станция для его реализации
Устройство обработки сигнала (варианты)
Способ обзора пространства радиолокационной станцией

