Результат интеллектуальной деятельности: СИСТЕМА ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ
Вид РИД
Изобретение
Изобретение относится к области судостроения - автоматическому управлению движением корабля.
Известна система автоматического управления движением судна по заданному путевому углу, реализованная в «Системе автоматического управления движением судна» (патент RU №2248914, Б.И. №9, март 05 г.). В системе управления движением судна использована информация от датчика путевого угла, задатчика путевого угла и сумматора, в котором по сигналам: текущего путевого угла, заданного путевого угла, угловой скорости судна, формируется закон управления рулевым приводом судна.
Известна также система автоматического управления движением корабля с использованием динамической модели углового движения корабля (см. патент RU №2223197, Б.И. №4, 2004 г, принятый авторами в качестве прототипа). «Аппаратура автоматического управления движением судна», содержащая задатчик курсового угла, датчик угла руля, приемник спутниковой навигационной системы (датчик путевого угла), рулевой привод, динамическую модель углового движения корабля (фильтр), блок дифференцирования и сумматор, первый вход которого соединен с выходом задатчика путевого угла, выход приемника СНС соединен с вторым входом сумматора, к третьему входу которого подключен выход датчика угла руля, четвертый вход сумматора соединен с выходом блока дифференцирования. На выходе динамической модели движения судна-фильтре формируется оценка путевого угла. Оценка путевого угла алгебраически суммируется с путевым углом. Разность этих сигналов вводится на вход динамической модели движения судна-фильтра.
В системе управления движением корабля формируется закон автоматического управления движением судна.
В задатчике курсового угла формируют сигнал - ϕзд=f(t), Сигнал оценки угла курса - ϕ формируется с использованием фильтра, который содержит электронную (динамичесую) модель движения судна. Для формирования оценки сигнала угла курса на вход электронной модели движения корабля поступает угол руля δ от датчика руля и сигнал невязки с выхода электронной модели движения корабля и датчика угла курса: К(ϕ-ϕ). На выходе сумматора-регулятора формируется заданное значение угла руля - δзд (или d/dt δзд), который подключается к входу рулевого привода:
d/dtδзд=К1 (ϕ-ϕзд)+К2d/dtϕ К3δ,
где ϕ - оценка угла курса (с выхода электронной модели движения корабля-фильтра калмана),
δ - угол руля (с выхода датчика руля),
ϕзд - заданное значение угла курса (из задатчика угла курса),
δзд - заданное значение угла руля (или d/dt δзд) (формируется в сумматоре).
Недостатками известных систем автоматического управления движением (САУД) являются:
- отсутствие встроенного контроля исправности источников информации САУД,
- выход из строя датчиков информации о состоянии корабля приводит к аварийным ситуациям,
- выход из строя вычислительных сетей фильтра обработки входной информации также приводит к аварийным ситуациям,
- системы управления не являются отказоустойчивыми.
Техническим результатом предлагаемой системы управления движением судна является:
- повышение точности и надежности системы управления движением,
- введение блоков диагностики и формирователя средних значений оценок глубины и угла дифферента позволило осуществлять не только контроль исправности САУД, но и перестройку ее архитектуры при появлении сбоя в САУД,
- дополнительное введение в состав системы: 2-х резервных датчиков глубины, трех измерителей угла дифферента и пяти фильтров с электронной динамической моделью движения корабля позволило обеспечить сохранение нормальной работы САУД не только при сбоях в датчиках информации, но и в вычислительных сетях фильтров обработки входной информации.
Технический результат в предлагаемой системе управления достигается благодаря:
- применению формирователя средних значений оценок глубины и угла дифферента, двух дополнительных датчиков глубины и трех формирователей угла дифферента, что позволило получать (более точные) усредненные значения оценок глубины  и оценок угла дифферента -
и оценок угла дифферента -  :
:
а) с трех датчиков глубины, датчика угла дифферента совместно с тремя формирователями угла дифферента (при отсутствии сбоев во всех четырех датчиках САУД в нормальных условия эксплуатации),
б) с двух исправных датчиков глубины (третий датчик глубины (любой) вышел из строя) или при сбое датчика угла дифферента.
Формирование системы отказоустойчивого управления движением корабля.
Система отказоустойчивого управления движением корабля содержит: датчик руля δ, датчик глубины h1, датчик угла дифферента ψ1, рулевой привод, задатчик глубины hзд и угла дифферента ψзд, фильтр оценки глубины  , фильтр оценки угла дифферента
, фильтр оценки угла дифферента  и сумматор, на первый вход которого подключен: датчика руля δ, на второй вход - блок дифференцирования, на третий вход - задатчик глубины hзд и угла дифферента - ψзд. Выход сумматора подключен к входу рулевого привода.
и сумматор, на первый вход которого подключен: датчика руля δ, на второй вход - блок дифференцирования, на третий вход - задатчик глубины hзд и угла дифферента - ψзд. Выход сумматора подключен к входу рулевого привода.
Фильтр оценки глубины  содержит динамическую модель движения корабля по глубине, на вход которой подключен:
содержит динамическую модель движения корабля по глубине, на вход которой подключен:
- датчик глубины h1 (который вырабатывает текущую глубину корабля - h),
- датчик руля δ (который выдает угол руля - δ).
На выходе фильтра оценки глубины
вырабатывается оценка глубины -
(с использованием Методов Калмановской фильтрации).
Фильтр оценки угла дифферента
содержит динамическую модель движения корабля по углу дифферента - ψ, на вход которой подключен:
- датчик угла дифферента ψ1,
- датчик руля δ.
На выходе фильтра оценки угла дифферента
вырабатывается оценка угла дифферента
.
Для реализации предложенного заявителем технического результата в систему введены: датчик глубины h2, датчик глубины h3, формирователь средних значений оценки глубины  , фильтр оценки глубины
, фильтр оценки глубины  , фильтр оценки глубины
, фильтр оценки глубины  , фильтр оценки угла дифферента
, фильтр оценки угла дифферента
 , фильтр оценки угла дифферента
, фильтр оценки угла дифферента  , фильтр оценки угла дифферента
, фильтр оценки угла дифферента  . Ha первый вход каждого из пяти фильтров подключен выход датчика руля δ. Датчик глубины h2 подключен к второму входу фильтру оценки глубины h2. Датчик глубины h3 подключен к второму входу фильтра оценки глубины h3.
. Ha первый вход каждого из пяти фильтров подключен выход датчика руля δ. Датчик глубины h2 подключен к второму входу фильтру оценки глубины h2. Датчик глубины h3 подключен к второму входу фильтра оценки глубины h3.
К второму и третьему входам трех фильтров оценки угла дифферента: 1)  , 2)
, 2)  , 3)
, подключены соответственно выходы датчиков глубины: 1) h1 и h2, 2) h2 и h3, 3) h1 и h3, семь блоков диагностики:
, 3)
, подключены соответственно выходы датчиков глубины: 1) h1 и h2, 2) h2 и h3, 3) h1 и h3, семь блоков диагностики:  ,
,
,
,
,
,
,
,
,
,  ,
, к первым входам которых подключены соответственно:
,
, к первым входам которых подключены соответственно:
- выход фильтра оценки глубины  ,
,
- выход фильтра оценки глубины
,
- выход фильтра оценки глубины
,
- выход фильтра оценки угла дифферента
,
- выход фильтра оценки угла дифферента
,
- выход фильтра оценки угла дифферента
,
- выход фильтра оценки угла дифферента
.
К второму входу четырех блоков диагностики:1)  , 2)
, 3)
, 4)
, подключены соответственно три датчика глубины:1) h1, 2) h2, 3) h3, и датчик угла дифферента 4)
.
, 2)
, 3)
, 4)
, подключены соответственно три датчика глубины:1) h1, 2) h2, 3) h3, и датчик угла дифферента 4)
.
К второму и третьему входам трех блоков диагностики 1)
, 2)
, 3)
подключены соответственно: 1) два датчика глубины h1, h2., 2) два датчика глубины h2, h3, 3) два датчика глубины h3, h1.
В семи блоках диагностики формируется семь модулей разности:
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , которые сравниваются с заданными постоянными, если модули разности удовлетворяют условиям (1):
, которые сравниваются с заданными постоянными, если модули разности удовлетворяют условиям (1):
 и
и 
(что подтверждает исправность «i»-ых датчиков и сетей формирования оценок глубины  и оценок угла дифферента
и оценок угла дифферента  ), то все эти оценки
), то все эти оценки  и
и  , введенные в блоки диагностики из соответствующих фильтров глубины
, введенные в блоки диагностики из соответствующих фильтров глубины  фильтров угла дифферента
фильтров угла дифферента  , подключают в блок формирователь средних значений оценок глубины
, подключают в блок формирователь средних значений оценок глубины  и средних значений оценок угла дифферента
и средних значений оценок угла дифферента  . В случае исправности системы отказоустойчивого управления движением корабля (исправны все четыре датчика h1, h2, h3 и ψ1 и сети фильтров) в формирователе средних значений оценок глубины
. В случае исправности системы отказоустойчивого управления движением корабля (исправны все четыре датчика h1, h2, h3 и ψ1 и сети фильтров) в формирователе средних значений оценок глубины  и средних значений оценок угла дифферента
и средних значений оценок угла дифферента  получим среднее значение оценок глубины
получим среднее значение оценок глубины  и среднее значение оценок угла дифферента
и среднее значение оценок угла дифферента  . Выход формирователя среднего значения оценки глубины
. Выход формирователя среднего значения оценки глубины  и среднего значения оценки угла дифферента
и среднего значения оценки угла дифферента  подключен к четвертому входу сумматора.
подключен к четвертому входу сумматора.
Выход сумматора подключен к входу рулевого привода.
а) На входе рулевого привода (в случае установки в САУД режима автоматического управления движением корабля по глубине) формируется закон управления движением корабля по глубине, имеющий вид (аналогичен закону, принятому в прототипе):
 ,
,
где  - среднее значение оценки глубины (подключено к четвертому входу сумматора с выхода блока формирователя средних значений оценок глубины
- среднее значение оценки глубины (подключено к четвертому входу сумматора с выхода блока формирователя средних значений оценок глубины  и средних значений оценок угла дифферента
и средних значений оценок угла дифферента  ,
,
 - заданное значение глубины (подключено к третьему входу сумматора с выхода задатчика глубины hзд и угла дифферента ψзд),
- заданное значение глубины (подключено к третьему входу сумматора с выхода задатчика глубины hзд и угла дифферента ψзд),
 - производная от оценки среднего значения глубины (подключена к второму входу сумматора с выхода блока дифференцирования),
- производная от оценки среднего значения глубины (подключена к второму входу сумматора с выхода блока дифференцирования),
δ - угол руля (подключен к первому входу сумматора с выхода датчика руля),
δзд - заданное значение угла руля,
d/dt_δзд - вводится с выхода сумматора на вход рулевого привода,
К1a, 2а, 3а - постоянные коэффициенты регулирования.
б) На входе рулевого привода (в случае установки режима автоматического управления движением корабля по углу дифферента) формируется закон управления движением корабля по углу дифферента, имеющий вид:
 ,
,
где  - среднее значение оценки угла дифферента (подключено к четвертому входу сумматора с выхода блока формирователя средних значений оценок глубины
- среднее значение оценки угла дифферента (подключено к четвертому входу сумматора с выхода блока формирователя средних значений оценок глубины  и средних значений оценок угла дифферента
и средних значений оценок угла дифферента  ),
),
ψзд - заданное значение угла дифферента (подключено к третьему входу сумматора с выхода задатчика глубины hзд и угла дифферента ψзд),
 - производная от оценки среднего значения угла дифферента (подключена к второму входу сумматора с выхода блока дифференцирования, вход которого подключен к выходу формирователя средних значений оценок глубины
- производная от оценки среднего значения угла дифферента (подключена к второму входу сумматора с выхода блока дифференцирования, вход которого подключен к выходу формирователя средних значений оценок глубины  и средних значений оценок угла дифферента
и средних значений оценок угла дифферента  ),
),
δ - угол руля (подключен к первому входу сумматора с датчика руля),
δзд - заданное значение угла руля
d/dt_δзд - формируется на выходе сумматора(которое подключается к входу рулевого привода),
K1,2,3 - постоянные коэффициенты регулирования.
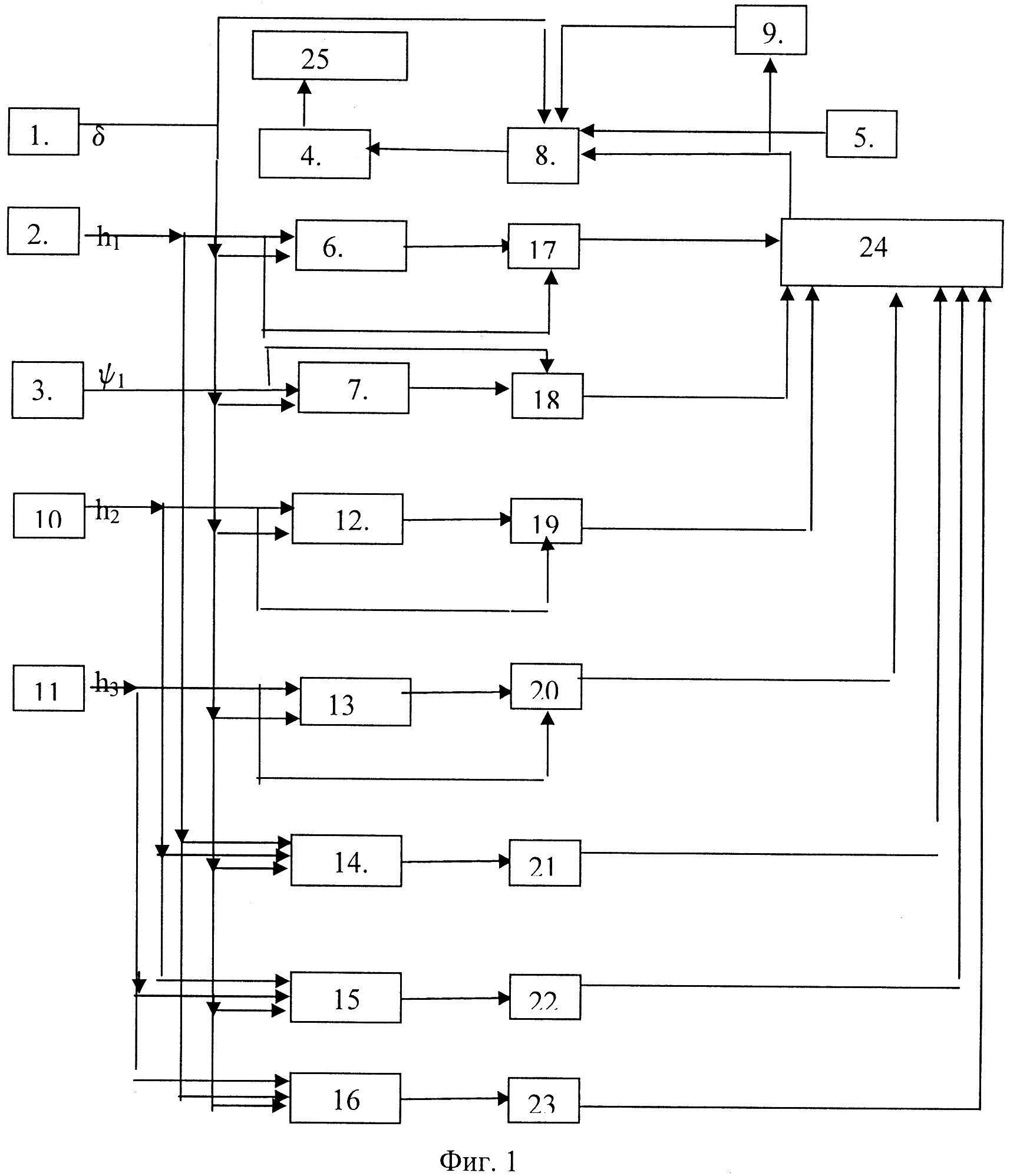
Система отказоустойчивого управления движением корабля поясняется чертежами.
На фигуре 1 приведена блок-схема системы отказоустойчивого управления движением корабля, которая содержит:
датчик руля δ - 1, датчик глубины h1 - 2, датчик угла дифферента ψ - 3, рулевой привод - 4, задатчик глубины и угла дифферента hзд, ψзд - 5, фильтр оценки глубины h1 - 6, фильтр оценки угла дифферента ψ1 - 1, сумматор - 8, блок дифференцирования - 9, второй и третий датчики глубины h2 и h3 - 10, 11, фильтр оценки глубины h2 - 12, фильтр оценки глубины h3 - 13, фильтр оценки угла дифферента ψ2 - 14, фильтр оценки угла дифферента ψ3 - 15, фильтр оценки угла дифферента ψ4 - 16, семь блоков диагностики 17-23, формирователь средних значений оценок глубины  и средних значений оценок угла дифферента
и средних значений оценок угла дифферента  - 24.
- 24.
Объект управления - корабль - 25.
Реализация рассматриваемой системы возможна на базе:
- аналоговых счетно-решающих элементов с использованием дискретных логических элементов,
- с использованием цифровой техники,
- датчики следует применить серийно выпускаемые нашей промышленностью с точностью измерения не хуже 0,5°,
- фильтры оценки глубины и оценки угла дифферента включают электронные модели движения корабля с постоянными коэффициентами передачи (может быть использована также адаптивная электронная модель движения корабля),
- блоки диагностики и формирователь средних значений оценок глубины  и средних значений оценок угла дифферента
и средних значений оценок угла дифферента  - 24 - целесообразно реализовывать в форме программно-аппаратных модулей.
- 24 - целесообразно реализовывать в форме программно-аппаратных модулей.
Особенности работы системы отказоустойчивого управления движением корабля.
1. Формирование оценок измеряемой информации -
, (используются датчики 1, 2, 3, 10, 11, фильтры 6, 7, 12-16 и формирователь 24).
(используются датчики 1, 2, 3, 10, 11, фильтры 6, 7, 12-16 и формирователь 24).
Оценки глубины корабля
оценки угла дифферента  вырабатываются в семи фильтрах 6, 7, 12-16 с использованием электронной модели движения корабля по глубине и углу дифферента.
вырабатываются в семи фильтрах 6, 7, 12-16 с использованием электронной модели движения корабля по глубине и углу дифферента.
а) Формирование оценок глубины
. На первый вход трех фильтров оценки глубины:  - 6,
- 6, и
и  подключен выход датчика руля δ - 1, вторые входы этих трех фильтров оценки глубины соединены соответственно с:
подключен выход датчика руля δ - 1, вторые входы этих трех фильтров оценки глубины соединены соответственно с:
- выходом датчика глубины h1 - 2 (подключен к фильтру оценки глубины - 6),
- выходом датчика глубины h2 -_ 10 (подключен к фильтру оценки глубины - 12),
- выходом датчика глубины h3 - 11 (подключен к фильтру оценки глубины - 13).
б) Формирование оценок угла дифферента -  . На первый вход четырех фильтров угла дифферента: ψ1 - 7, ψ2 - 14, ψ3 - 15, ψ4 - 16, подключен выход датчика руля δ - 1. На второй вход фильтра оценки угла дифферента - 7 подключен выход датчика угла дифферента ψ1 - 3. Второй и третий входы остальных трех фильтров оценки угла дифферента соединены с:
. На первый вход четырех фильтров угла дифферента: ψ1 - 7, ψ2 - 14, ψ3 - 15, ψ4 - 16, подключен выход датчика руля δ - 1. На второй вход фильтра оценки угла дифферента - 7 подключен выход датчика угла дифферента ψ1 - 3. Второй и третий входы остальных трех фильтров оценки угла дифферента соединены с:
- датчиками глубины h1 - 2. и h2 - 10 (подключены к фильтру оценки угла дифферента - 14),
- датчиками глубины h2 - 10 и h3 - l1 (подключены к фильтру оценки угла дифферента - 15),
- датчиками глубины h1 - 2 и h3 - 11 (подключены к фильтру оценки угла дифферента - 16),
2. Формирование оценок глубины  и оценок угла дифферента
и оценок угла дифферента  в формирователе - 24 (используются три датчика глубины: 2, 10, 11, и датчик угла дифферента 3, семь блоков диагностики 17-23 и формирователь средних значений оценок глубины
в формирователе - 24 (используются три датчика глубины: 2, 10, 11, и датчик угла дифферента 3, семь блоков диагностики 17-23 и формирователь средних значений оценок глубины  и средних значений оценок угла дифферента
и средних значений оценок угла дифферента  - 24).
- 24).
а) В блоках диагностики 17, 19, 20 вычисляется модуль разности:  ,
,
если модуль разности глубин меньше допустимого значения Сh:
 ,
,
то с выхода данного «i» блока диагностики поступит оценка глубины  в формирователь средних значений
в формирователь средних значений  - 24,
- 24,
если удовлетворяется условие:
 ,
,
то с выхода данного «i» блока диагностики не поступит оценка глубины  в формирователь средних значений
в формирователь средних значений  - 24,
- 24,
б) В блоках диагностики 18, 21, 22 и 23 формируется модуль разности:
,
,
и
,
если модуль разности угла дифферента меньше допустимого значения Сψ:
 ,
,
то с выхода данного «i» блока диагностики поступит оценка угла дифферента  в формирователь средних значений оценок глубины
в формирователь средних значений оценок глубины  и угла дифферента
и угла дифферента  - 24,
- 24,
если удовлетворяется условие:
 ,
,
то оценки угла дифферента -  с «i» блока диагностики 18, или 21, или 22, или 23 не вводятся в формирователь 24.
с «i» блока диагностики 18, или 21, или 22, или 23 не вводятся в формирователь 24.
3. Получение средних значений оценок глубины hcp и оценок угла дифферента ψср (формирователь средних значений оценок глубины hcp и оценок угла дифферента ψср - 24)
а) В случае нормальных условий плавания (все каналы управления САУД исправны) в семи блоках диагностики 17-23 удовлетворяются условия (3) и (4), поэтому три оценки глубины и четыре оценки угла дифферента вводятся в формирователь среднего значения оценки глубины  и дифферентам
и дифферентам  - 24 (в формирователе 24 в этом случае вычисляется среднее значение оценки глубины и дифферента):
- 24 (в формирователе 24 в этом случае вычисляется среднее значение оценки глубины и дифферента):
 ,
,  ,
,
где
,  ,
,  - оценки глубины, вычисленные в фильтрах 6, 12, 13,
- оценки глубины, вычисленные в фильтрах 6, 12, 13,
,  ,
,  ,
,  - оценки угла дифферента, вычисленные в фильтрах 7, 14, 15, 16.
- оценки угла дифферента, вычисленные в фильтрах 7, 14, 15, 16.
Выход формирователя средних значений оценки глубины и угла дифферента 24 подключен к четвертому входу сумматора 8. На выходе сумматора 8 формируется закон управления рулевым приводом, в соответствии с зависимостью (2) или (2а). Выход сумматора 8 подключен к входу рулевого привода 4, при этом обеспечивается движение корабля на заданной глубине или с заданным углом дифферента (в зависимости от установленного в САУД режима управления движением по заданной глубине плавания или с заданным углом дифферента).
б) В случае сбоя в одном из датчиков 2, или 3, или 10, или 11 (каналов формирования оценок
и  ) в блоках диагностики удовлетворяется условие (3а) и/или (4а), при этом в формирователе среднего значения оценки глубины
) в блоках диагностики удовлетворяется условие (3а) и/или (4а), при этом в формирователе среднего значения оценки глубины  и дифферента
и дифферента  24 вычисляется среднее значение оценки глубины и дифферента с использованием оценок
и
24 вычисляется среднее значение оценки глубины и дифферента с использованием оценок
и  только исправных каналов.
только исправных каналов.
б1) Сбой в датчике h1 - 2:
- в блоке диагностики 17 реализовалась зависимость (3а):
 ,
,
- в блоке диагностики 21 реализовалась зависимость (4а):
 ,
,
- в блоке диагностики 23 реализовалась зависимость (4а):
 ,
,
где: ψ2 - измеренный угол дифферента (ψ2=(h1-h2)/L вычисляется в фильтре 14 с использованием измеренных глубин: h1 с датчика 2, h2 с датчика 10, который из фильтра 14 вводится в блок диагностики 21),
 - оценка угла дифферента ψ2 (вычисляется в фильтре 14 с использованием динамической модели движения корабля по дифференту),
- оценка угла дифферента ψ2 (вычисляется в фильтре 14 с использованием динамической модели движения корабля по дифференту),
ψ4 - измеренный угол дифферента (ψ4=(h1-h3)/L1 вычисляется в фильтре 16 с использованием измеренных глубин: h1 с датчика 2, h3 с датчика 11, который из фильтра 16 и вводится в блок диагностики 23),
 - оценка угла дифферента ψ4 (вычисляется в фильтре 16 с использованием динамической модели движения корабля по дифференту),
- оценка угла дифферента ψ4 (вычисляется в фильтре 16 с использованием динамической модели движения корабля по дифференту),
L - расстояние между датчиками 2 и 10,
L1 - расстояние между датчиками 2 и 11.
Среднее значение оценки глубины  и дифферента
и дифферента  в формирователе среднего значения оценки глубины и дифферента 24 вычисляется в виде:
в формирователе среднего значения оценки глубины и дифферента 24 вычисляется в виде:
 ,
,  .
.
Среднее значение оценки глубины - h ср (51) поступит в сумматор 8 только при режиме управления движением корабля по глубине (см. зависимость (2)).
Среднее значение оценки угла дифферента - ψ ср (51) поступит в сумматор 8 только при режиме управления движением корабля по углу дифферента (см. зависимость (2а)).
б2) Сбой в датчике глубины h2 - 10:
- в блоке диагностики 19 реализовалась зависимость (3а):
 ,
,
- в блоке диагностики 21 реализовалась зависимость (4а):
 ,
,
- в блоке диагностики 22 реализовалась зависимость (4а):
 ,
,
где: ψ2 - измеренный угол дифферента (ψ2=(h1-h2)/L вычисляется в фильтре 14 с использованием измеренных глубин: h1 с датчика 2, h2 с датчика 10, ψ2 из фильтра 14 вводится в блок диагностики 21),
 - оценка угла дифферента ψ2 (вычисляется в фильтре 14 с использованием динамической модели движения корабля по дифференту),
- оценка угла дифферента ψ2 (вычисляется в фильтре 14 с использованием динамической модели движения корабля по дифференту),
ψ3 - измеренный угол дифферента (ψ3=(h1-h3)/L2 вычисляется в фильтре 15 с использованием измеренных глубин: h1 с датчика 2, h3 с датчика 11, ψ3 из фильтра 15 вводится в блок диагностики 22),
 - оценка угла дифферента
- оценка угла дифферента  (вычисляется в фильтре 15 с использованием динамической модели движения корабля по дифференту),
(вычисляется в фильтре 15 с использованием динамической модели движения корабля по дифференту),
L - расстояние между датчиками 2 и 10,
L2 - расстояние между датчиками 2 и 11.
Среднее значение оценки глубины  и дифферента
и дифферента  в формирователе среднего значения оценки глубины и дифферента 24 примет вид:
в формирователе среднего значения оценки глубины и дифферента 24 примет вид:
 ,
,  .
.
б3) Сбой в датчике глубинны h3 - 11:
- в блоке диагностики 20 реализовалась зависимость (3а):
 ,
,
- в блоке диагностики 23 реализовалась зависимость (4а):
 ,
,
-. в блоке диагностики 22 реализовалась зависимость (4а):
 ,
,
где: ψ4 - измеренный угол дифферента (ψ4=(h1-h)/L вычисляется в фильтре 16 с использованием измеренных глубин: h1 с датчика 2, h3 с датчика 11, ψ4 из фильтра 16 вводится в блок диагностики 22),
 - оценка угла дифферента
- оценка угла дифферента  (вычисляется в фильтре 16 с использованием динамической модели движения корабля по углу дифферента),
(вычисляется в фильтре 16 с использованием динамической модели движения корабля по углу дифферента),
ψ3 - измеренный угол дифферента (ψ3=(h2-h3)/L2 вычисляется в фильтре 15 с использованием измеренных глубин: h2 с датчика 10, h3 с датчика 11, ψ3 из фильтра 15 вводится в блок диагностики 22),
 - оценка угла дифферента ψ3 (вычисляется в фильтре 15 с использованием динамической модели движения корабля по углу дифферента),
- оценка угла дифферента ψ3 (вычисляется в фильтре 15 с использованием динамической модели движения корабля по углу дифферента),
L - расстояние между датчиками 2 и 11,
L2 - расстояние между датчиками 10 и 11.
Среднее значение оценки глубины  и дифферента
и дифферента  в формирователе среднего значения оценки глубины и дифферента 24 примет вид:
в формирователе среднего значения оценки глубины и дифферента 24 примет вид:
 ,
,  .
.
г) Сбой в датчике угла дифферента ψ1 - 3:
в блоке диагностики 7 выполнилась зависимость:
 .
.
Среднее значение оценки глубины
и дифферента
в формирователе среднего значения оценки глубины и дифферента 24 примет вид:
 ,
,  .
.
4. Управление движением корабля по глубине или углу дифферента.
В предложенной САУД предусматривается два режима управления движением корабля:
- переходы на заданное значение глубины и последующую стабилизацию на ней - 
- по углу дифферента с последующей стабилизацией на этом угле дифферента ψср=ψзд.
Рассмотрим режим управления по глубине.
Боцман в задатчике глубины и угла дифферента 5 устанавливает требуемый режим управления.
а) Устанавливает задатчиком 5 заданную глубину плавания корабля hзд, при этом в рассматриваемой системе формируется закон (2) автоматического управления рулевым приводом 4, который выводит корабль на заданную глубину и удерживает корабль на заданной глубине.
Рассмотрим операции, которые при этом выполняются в системе.
На вход сумматора 8 подключены:
- заданная глубина hзд (с задатчика глубины дифферента 5),
- скорость изменения глубины d/dth cp с блока дифференцирования 9, на вход которого поступает оценка среднего значения глубины из формирователя 24),
- угол перекладки руля δ (с датчика руля 1),
- среднее значение оценок глубин -  (с формирователя среднего значения оценок глубин
(с формирователя среднего значения оценок глубин  и угла дифферента ψср - 24).
и угла дифферента ψср - 24).
В сумматоре 8 формируется закон управления (2), который и реализуется на входе рулевого привода 4, обеспечивая тем самым движение корабля на заданной глубине hзд.
б) Устанавливает заданный угол дифферента ψзд, при этом в рассматриваемой системе формируется закон (2а) автоматического управления рулевым приводом 4, который выводит корабль на заданный угол дифферента и удерживает корабль на заданном значении угла дифферента.
Рассмотрим операции, которые при этом выполняются в системе. На вход сумматора 8 подключается:
- заданный угол дифферента - ψзд (с задатчика глубины и дифферента 5),
- производная от оценки среднего угла дифферента - d/dt_ψcp (с блока дифференцирования 9, на вход которого поступает оценка среднего значения угла дифферента ψср из формирователя 24),
- угол перекладки руля - δ (с датчика руля 1),
- среднее значение оценок угла дифферента - ψср (с формирователя среднего значения оценок глубин  и угла дифферента ψср - 24);
и угла дифферента ψср - 24);
В сумматоре 8 формируется закон управления (2а), который поступает на вход рулевого привода 4, обеспечивая тем самым движение корабля с заданным углом дифферента ψзд.
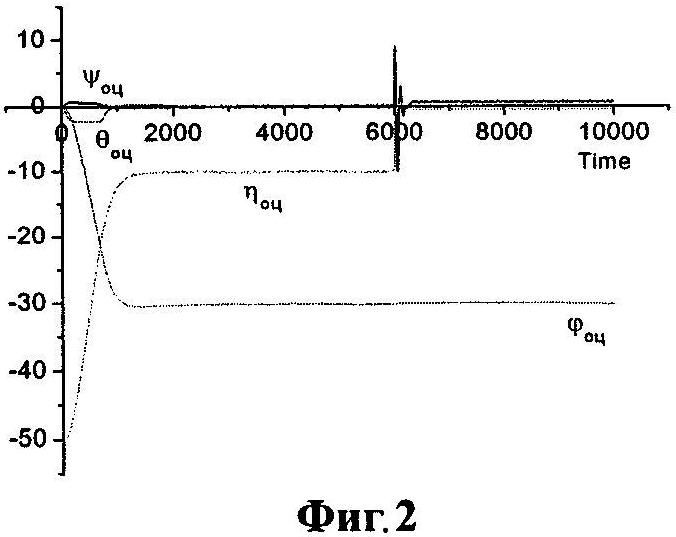
Проведенное моделирование работы рассмотренной выше системы подтвердило эффективность использования предложенной системы отказоустойчивого управления.
На фиг 2. и 3 представлены результаты моделирования алгоритмов фильтрации в случае отказа одного из датчиков глубины в типовой САУД и в системе отказоустойчивого управления движением корабля, которая рассмотрена выше.
Система отказоустойчивого управления движением корабля, содержащая блок дифференцирования, датчик руля δ, датчик глубины h, датчик угла дифферента ψ, рулевой привод, задатчик глубины h и угла дифферента ψ, сумматор, на первый вход которого подключен датчик руля δ, на второй вход-выход блока дифференцирования, на третий вход - задатчик глубины h и угла дифферента ψ, выход сумматора подключен к входу рулевого привода, фильтр оценки глубины , на вход которого подключен датчик глубины h и датчик руля δ, фильтр оценки угла дифферента , на вход которого подключен датчик угла дифферента ψ и датчик руля δ, отличается тем, что в систему введены: датчик глубины h, датчик глубины h, фильтр оценки глубины , фильтр оценки глубины , фильтр оценки угла дифферента , фильтр оценки угла дифферента , фильтр оценки угла дифферента , на первый вход каждого из пяти фильтров: , , , , подключен выход датчика руля δ, датчик глубины h подключен ко второму входу фильтра оценки глубины h, датчик глубины h подключен ко второму входу фильтра оценки глубины h, ко второму и третьему входам трех фильтров оценки угла дифферента: 1) , 2) , 3) подключены соответственно выходы двух датчиков глубины: 1) h и h, 2) hи h, 3) h и h; формирователь средних значений оценки глубины и оценки угла дифферента ; семь блоков диагностики: , , , , , , , к первым входам которых подключены соответственно: выход фильтра оценки глубины , выход фильтра оценки глубины , выход фильтра оценки глубины , выход фильтра оценки угла дифферента , выход фильтра оценки угла дифферента , выход фильтра оценки угла дифферента , выход фильтра оценки угла дифферента ; ко второму входу четырех блоков диагностики: 1) , 2) , 3) , 4) подключены соответственно три датчика глубины: 1) h, 2) h, 3) h и датчик угла дифферента 4) ψ; ко второму и третьему входам трех фильтров оценки угла дифферента: 1) , 2) , 3) подключены соответственно: а) два датчика глубины h, h, б) два датчика глубины h, h, 3) два датчика глубины h, h; в семи блоках диагностики формируются семь модулей разности: , , , , , , ;если все семь модулей разности удовлетворяют условиям: и |ψ - | < C,то оценки и из соответствующих фильтров глубины и фильтров угла дифферента , через блоки диагностики, подключаются в блок формирователь средних значений оценок глубины и средних значений оценок угла дифферента , где вычисляются средние значения: = ( + + )/3 и = ( + + + )/4,а) на входе рулевого привода (в случае установки в САУД режима автоматического управления движением корабля по глубине) формируется закон управления движением корабля по глубине вида (2): ,где - среднее значение оценки глубины, которое вводится на четвертый вход сумматора с выхода формирователя средних значений оценок глубины и средних значений оценок угла дифферента , - заданное значение глубины, - производная от оценки среднего значения оценки глубины ,δ - угол руля,δ - заданное значение угла руля,К - постоянные коэффициенты регулирования,б) на входе рулевого привода (в случае установки режима автоматического управления движением корабля по углу дифферента) формируется закон управления движением корабля по углу дифферента: ,где - среднее значение оценки угла дифферента, которое вводится на четвертый вход сумматора с выхода формирователя средних значений оценок глубины и средних значений оценок угла дифферента ,ψ - заданное значение угла дифферента, - производная от оценки среднего значения угла дифферента,δ - угол руля,δ - заданное значение угла руля или d/dt_δ,K - постоянные коэффициенты регулирования,если не все семь модулей разности удовлетворяют условиям (1), а некоторые удовлетворяют условию (3) и или (4):|h- | ≥ C,|ψ - | ≥C,то в блоках диагностики и , в которых модули разности удовлетворяют условиям (3) или (4), отключаются эти оценки , от формирователя средних значений оценок глубины - и угла дифферента - :а) при сбое датчика глубины h в трех блоках диагностики: h, ψ, и ψ удовлетворяется условие (3), (4):|h- | ≥ C, |ψ- | ≥Cψ, |ψ - | ≥Cψ,при этом в формирователе средних значений оценок глубины и угла дифферента будет: = 1/2 ( + ), = 1/2 ( + );б) при сбое датчика глубины h удовлетворяются условия (3), (4) в трех блоках диагностики: h, ψ, и ψ, при этом в формирователе средних значений оценок глубины и угла дифферента будет: = 1/2 ( + ), = 1/2 ( + ),в) при сбое датчика глубины h удовлетворяется условие (3), (4) в трех блоках диагностики: h, ψ, и ψ, при этом в формирователе средних значений оценок глубины и угла дифферента будет: = 1/2 ( + ), = 1/2 ( + ),г) при сбое датчика угла дифферента ψ удовлетворяется условие (4) в блоке диагностики ψ, при этом в формирователе средних значений оценок глубины и угла дифферента будет: = 1/3 ( + + ), = 1/3 ( + + ).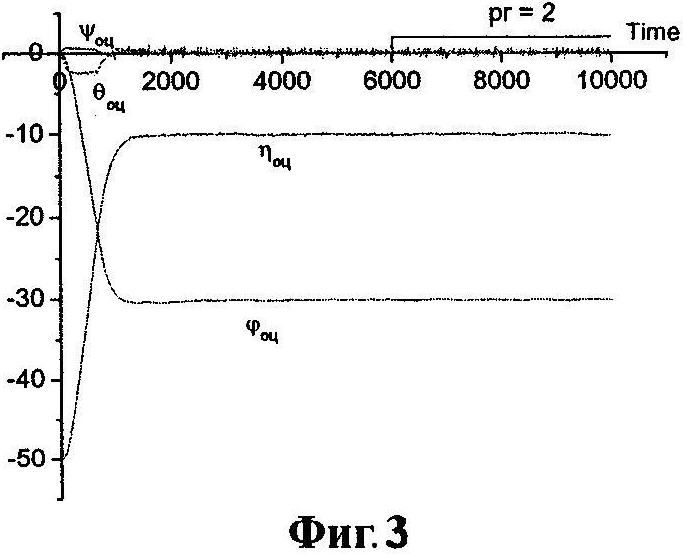











































Способ измерения вектора гармонического сигнала
Способ измерения диэлектрической проницаемости жидкости в емкости
Гравитационный ускоритель
Радиоволновый фазовый способ измерения толщины диэлектрических материалов
Устройство преобразования механической энергии движения водной среды в электрическую энергию
Динамический логический элемент и-или
Обобщенные неблокируемые двухкаскадные сети клоза
Способ извлечения пресной воды из атмосферного воздуха
Способ определения расходной характеристики гидравлического тракта и устройство для его осуществления
Устройство для определения концентрации кислорода
Способ измерения вектора гармонического сигнала
Способ измерения диэлектрической проницаемости жидкости в емкости
Гравитационный ускоритель
Радиоволновый фазовый способ измерения толщины диэлектрических материалов
Устройство преобразования механической энергии движения водной среды в электрическую энергию
Динамический логический элемент и-или
Обобщенные неблокируемые двухкаскадные сети клоза
Способ извлечения пресной воды из атмосферного воздуха
Способ определения расходной характеристики гидравлического тракта и устройство для его осуществления
Устройство для определения концентрации кислорода

