Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области ракетной техники, а именно к управлению нестационарными объектами - космическими аппаратами.
Известен способ ориентации космического аппарата, заключающийся в измерении сигнала угла ориентации и сигнала угловой скорости, формировании сигнала задания и формировании сигнала управления космическим аппаратом [1].
Известно устройство для реализации способа ориентации космического аппарата, содержащее последовательно соединенные первый сумматор, первый усилитель, второй сумматор, двигатель-маховик, третий сумматор, космический аппарат, первый и второй выходы которого соединены соответственно со входом датчика угловой скорости и входом датчика угла, выход второго усилителя соединен со вторым входом второго сумматора [1].
Известный способ ориентации космического аппарата и устройство для реализации способа имеют недостаток, который заключается в низкой точности ориентации и малой надежности функционирования из-за отказов датчика угла ориентации и датчика угловой скорости вращения космического аппарата.
С целью устранения указанных недостатков известных способа ориентации космического аппарата и устройства для его реализации предложенный способ отличается тем, что формируют сигнал оценки угла ориентации и сигнал оценки угловой скорости вращения космического аппарата, формируют эталонный сигнал угла ориентации и эталонный сигнал угловой скорости, формируют сигнал оценки управления, определяют сигнал разности сигнала угла ориентации и сигнала оценки угла ориентации, определяют сигнал разности сигнала угловой скорости и сигнала оценки угловой скорости, определяют сигнал разности сигнала угла ориентации и эталонного сигнала угла ориентации, определяют сигнал разности сигнала угловой скорости и эталонного сигнала угловой скорости, определяют сигнал разности сигнала управления и сигнала оценки управления и определяют сигнал коррекции сигнала задания, сигнал коррекции сигнала задания математической модели и сигнал оценки внешней помехи по формулам соответственно
 ,
,
 ,
,
 ,
,
где λ0, λ, a 0, a 1=const>0, Km - коэффициент усиления, ε0 - сигнал разности сигнала угла ориентации и эталонного сигнала угла ориентации, ε - сигнал разности сигнала угла ориентации и сигнала оценки угла ориентации, ΔU - сигнал разности сигнала управления и сигнала оценки управления, с учетом которых корректируют сигнал оценки угла ориентации и сигнал оценки угловой скорости и используют их для ориентации космического аппарата, а устройство, его реализующее, отличается тем, что оно содержит дополнительно эталонную модель основного контура ориентации, блок памяти, девять сумматоров, шесть усилителей, пять интеграторов, два нормально-разомкнутых переключателя, пять нормально-замкнутых переключателей, выход четвертого сумматора через последовательно соединенные третий усилитель, пятый сумматор, шестой сумматор, первую модель двигателя-маховика, первый интегратор, второй интегратор, седьмой сумматор, первый нормально-замкнутый переключатель, третий интегратор, восьмой сумматор, второй нормально-замкнутый переключатель и блок памяти соединен с первым входом четвертого сумматора, выход датчика угловой скорости через третий нормально-замкнутый переключатель соединен со входом второго усилителя, а через последовательно-соединенные девятый сумматор и четвертый усилитель - со вторым входом восьмого сумматора, третий вход которого соединен со входом третьего интегратора, выход первого интегратора соединен со вторым входом девятого сумматора, а через первый нормально-разомкнутый переключатель - со входом второго усилителя, выход пятого усилителя соединен со вторым входом пятого сумматора, выход второго интегратора соединен со вторым входом четвертого сумматора, а через второй нормально-разомкнутый переключатель - с первым входом первого сумматора, второй вход которого соединен с третьим входом четвертого сумматора, выход датчика угла ориентации соединен со вторым входом седьмого сумматора, а через четвертый нормально-замкнутый переключатель - с первым входом первого сумматора, выход второго сумматора через последовательно соединенные десятый сумматор, пятый нормально-замкнутый переключатель и четвертый интегратор соединен со вторым входом шестого сумматора, выход которого соединен со вторым входом десятого сумматора, второй вход первого сумматора через последовательно соединенные эталонную модель основного контура ориентации, одиннадцатый сумматор, пятый интегратор и шестой усилитель соединен с четвертым входом четвертого сумматора, второй выход эталонной модели основного контура ориентации через последовательно соединенные двенадцатый сумматор и седьмой усилитель соединен с пятым входом четвертого сумматора, выход одиннадцатого сумматора через восьмой усилитель соединен с шестым входом четвертого сумматора, а через девятый усилитель - с третьим входом первого сумматора, выход пятого интегратора через десятый усилитель соединен с четвертым входом первого сумматора, вход второго усилителя соединен со вторым входом двенадцатого сумматора, выход которого через одиннадцатый усилитель соединен с пятым входом первого сумматора.
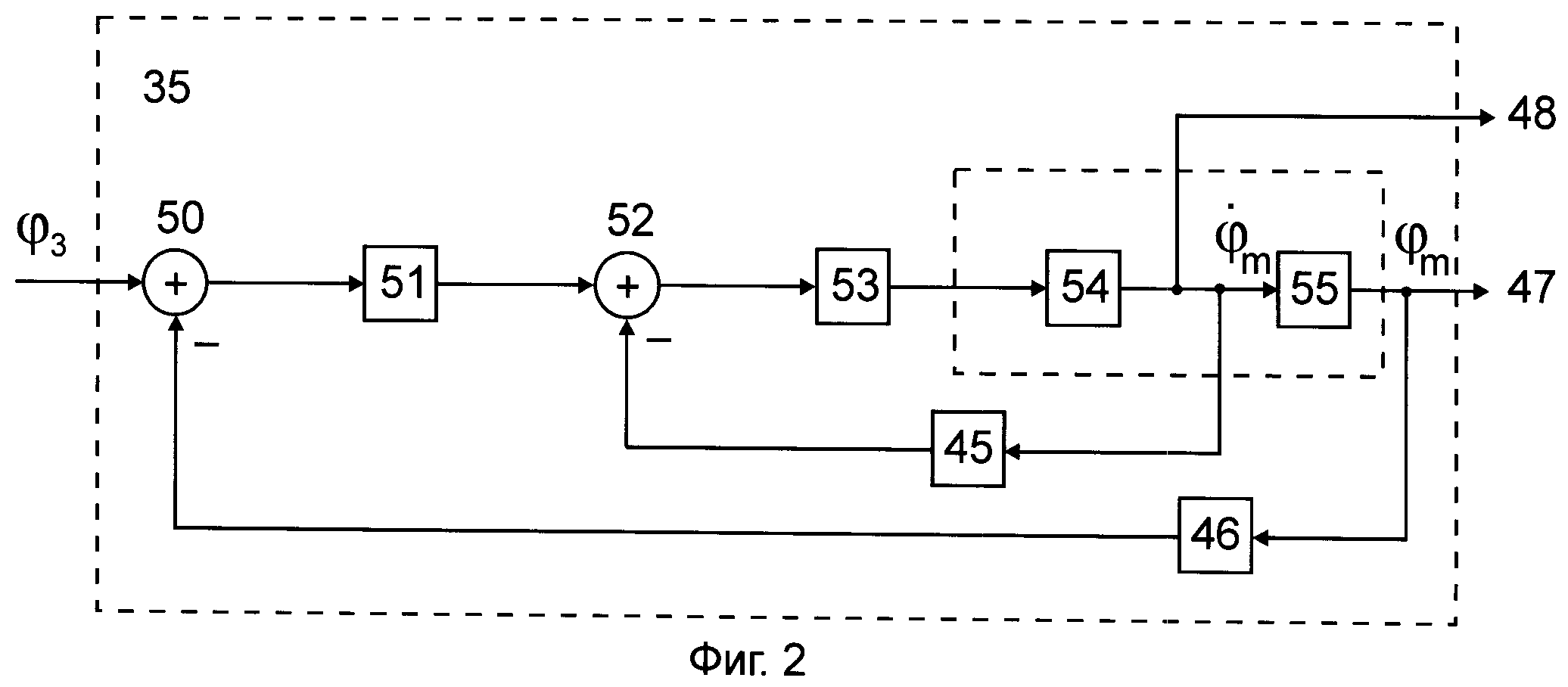
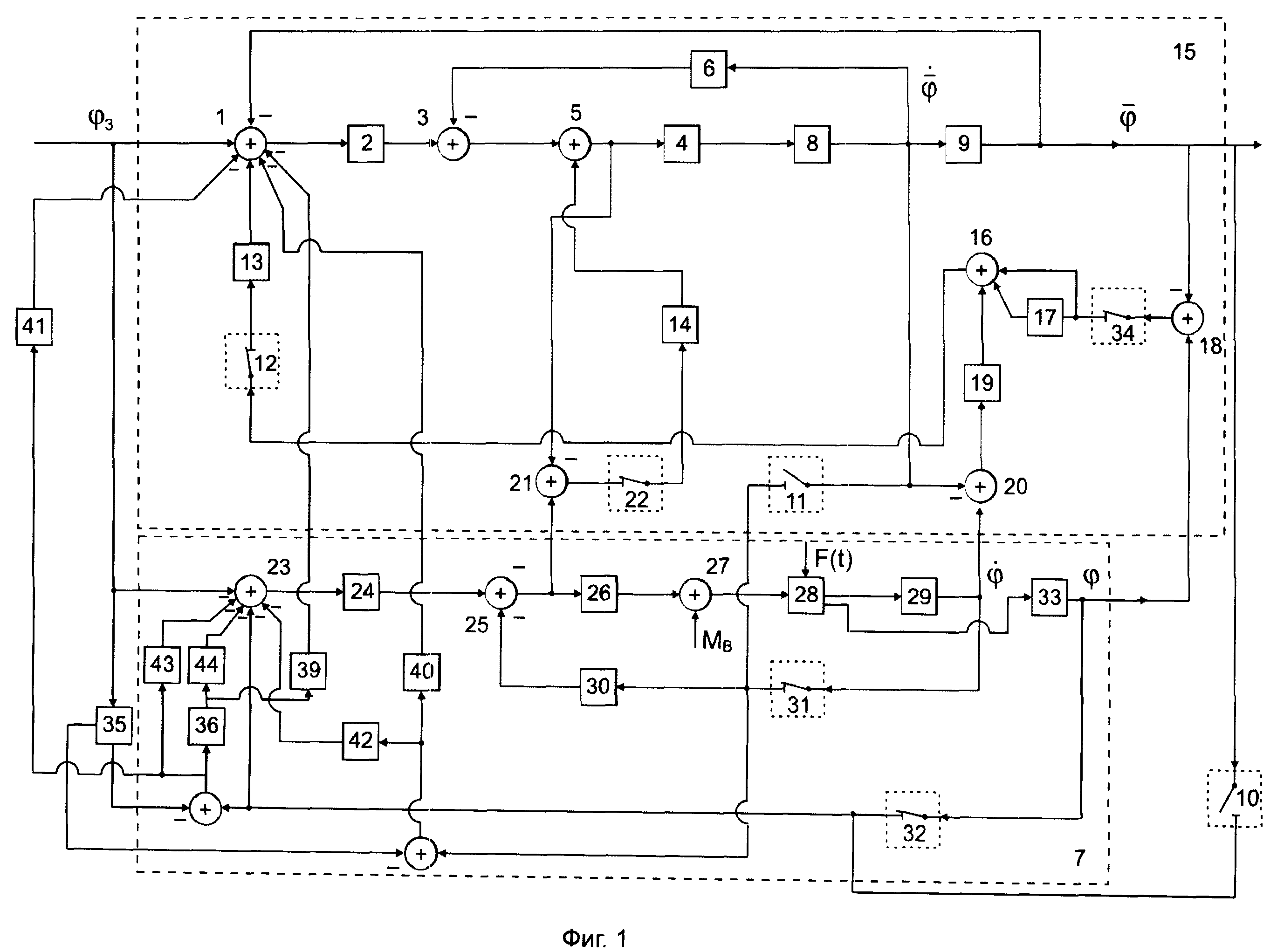
Суть предложенных способа и устройства поясняется фиг.1, на которой изображена структурная схема устройства, а на фиг.2 - структурная схема эталонной модели основного контура ориентации.
На чертежах приняты следующие обозначения:
1 - четвертый сумматор;
2 - третий усилитель;
3 - пятый сумматор;
4 - модель двигателя-маховика;
5 - шестой сумматор;
6 - пятый усилитель;
7 - основной контур ориентации (ОКО) космического аппарата;
8 - первый интегратор;
9 - второй интегратор;
10 - второй нормально-разомкнутый переключатель;
11 - первый нормально-разомкнутый переключатель;
12 - второй нормально-замкнутый переключатель;
13 - блок памяти;
14 - четвертый интегратор;
15 - математическая модель ОКО;
16 - восьмой сумматор;
17 - третий интегратор;
18 - седьмой сумматор;
19 - четвертый усилитель;
20 - девятый сумматор;
21 - десятый сумматор;
22 - пятый нормально-замкнутый переключатель;
23 - первый сумматор;
24 - первый усилитель;
25 - второй сумматор;
26 - двигатель-маховик;
27 - третий сумматор;
28 - космический аппарат;
29 - датчик угловой скорости;
30 - второй усилитель;
31 - третий нормально-замкнутый переключатель;
32 - четвертый нормально-замкнутый переключатель;
33 - датчик угла ориентации;
34 - первый нормально-замкнутый переключатель;
35 - эталонная модель ОКО;
36 - пятый интегратор;
37 - одиннадцатый сумматор;
38 - двенадцатый сумматор;
39 - шестой усилитель;
40 - седьмой усилитель;
41 - восьмой усилитель;
42 - одиннадцатый усилитель;
43 - девятый усилитель;
44 - десятый усилитель;
45, 46 - соответственно одиннадцатый и двенадцатый усилители;
47, 48 - первый и второй выходы эталонной модели ОКО соответственно;
50 - тринадцатый сумматор;
51 - тринадцатый усилитель;
52 - четырнадцатый сумматор;
53 - эталонная модель двигателя-маховика;
54 - шестой интегратор;
55 - седьмой интегратор.
Функционирует устройство для реализации способа ориентации космического аппарата следующим образом. Сигнал задания φз(t) поступает одновременно на основной контур управления 7 и математическую модель ОКО 15 (см. фиг.1).
Как видно из фиг.1, ОКО 7 составляют последовательно соединенные первый сумматор 23, первый усилитель 24, второй сумматор 25, двигатель-маховик 26, третий сумматор 27, космический аппарат 28 и датчик угловой скорости 29. Выход датчика угла ориентации 33 через четвертый нормально-замкнутый переключатель 32 соединен с первым сумматором 23, образуя отрицательную обратную связь по углу ориентации φ(t), а с выхода датчика угловой скорости 29 угловая скорость  поступает на вход второго сумматора 25, образуя отрицательную обратную связь по угловой скорости
поступает на вход второго сумматора 25, образуя отрицательную обратную связь по угловой скорости  . На второй вход третьего сумматора 27 поступает внешняя помеха Mв(t). На параметры космического аппарата 28 действует мультипликативная помеха F(t).
. На второй вход третьего сумматора 27 поступает внешняя помеха Mв(t). На параметры космического аппарата 28 действует мультипликативная помеха F(t).
Математическая модель ОКО 15 состоит из аналогичных ОКО 7 элементов структурной схемы: последовательно соединенные четвертый сумматор 1, третий усилитель 2, пятый сумматор 3, шестой сумматор 5, модель двигателя-маховика 4 и модель космического аппарата, выполненная в виде последовательно соединенных первого интегратора 8 и второго интегратора 9. В математической модели ОКО 15 также содержатся отрицательные обратные связи по оценке угловой скорости  и оценке угла ориентации
и оценке угла ориентации  с выходов первого интегратора 8 на вход пятого сумматора 3 и с выхода второго интегратора 9 на вход четвертого сумматора 1.
с выходов первого интегратора 8 на вход пятого сумматора 3 и с выхода второго интегратора 9 на вход четвертого сумматора 1.
Ввиду того что на космический аппарат 28 действуют внешние помехи Mв(t) и F(t), а на математическую модель ОКО 15 космического аппарата 28 внешние помехи F(t) и Mв(t) не действуют, то оценки  и
и  не будут совпадать с их реальными значениями соответственно
и φ(t).
не будут совпадать с их реальными значениями соответственно
и φ(t).
Следовательно, управление U(t) в ОКО 7 на выходе второго сумматора 25 будет отличаться от управления Um(t) в модели ОКО 15 на выходе шестого сумматора 5. Будем имитировать действие внешней помехи Mв в ОКО 7 в виде оценки внешней помехи  в модели ОКО 15.
в модели ОКО 15.
С этой целью с помощью десятого сумматора 21 пятого нормально-замкнутого переключателя 22 и четвертого интегратора 14 сформируем значение оценки
в виде
 ,
,
где Kgm - передаточная функция модели двигателя-маховика 4. При этом достаточно скорректировать значение Um(t) на выходе шестого сумматора 5. Кроме того, момент инерции J(t) космического аппарата в общем случае отличается от его оценки  . Для определения истинного значения момента инерции J(t) сформируем с помощью метода покомпонентного формирования управлений, основанного на использовании функций Ляпунова, сигнал подстройки ΔJ(t), который, как показано в [2], будет иметь вид
. Для определения истинного значения момента инерции J(t) сформируем с помощью метода покомпонентного формирования управлений, основанного на использовании функций Ляпунова, сигнал подстройки ΔJ(t), который, как показано в [2], будет иметь вид
 ,
,
что соответствует сигналу коррекции Uк оценки угла
и угловой скорости
, равного
 ,
,
где λ, а 0, а 1=const>0.
Для обеспечения устойчивости системы ориентации, включающей математическую модель ОКО 15 и ОКО 7, требуется определенный знак сигнала коррекции Uк(t). Знак сигнала Uк(t) определяет только составляющая  , т.к. значение
, т.к. значение  всегда больше или равно нулю.
всегда больше или равно нулю.
Поэтому, используя правило знаков при построении адаптивных систем управления согласно методу покомпонентного формирования управлений [2], можно принять значение сигнала коррекции Uк(t) в виде
 .
.
Ввиду того, что Uк(t) зависит от интеграла ошибки ε(t), то очевидно, что выход третьего интегратора 17 будет непрерывно меняться до тех пор, пока на его входе не будет величина, равная нулю. Это означает, что при ε(t)=0 устанавливаются равенства
 и
и  .
.
Для реализации сигнала коррекции используются седьмой сумматор 18, первый нормально-замкнутый переключатель 34, третий интегратор 17, восьмой сумматор 16, девятый сумматор 20, четвертый усилитель 19, второй нормально-замкнутый переключатель 12 и блок памяти 13, выход которого соединен с третьим входом четвертого сумматора (см. фиг.1).
Согласно предложенному способу ориентации сигнал задания φз(t) является входным сигналом для основного контура ориентации 7 и математической модели ОКО 15. Сигнал управления U(t) формируется на выходе второго сумматора 25, а сигнал оценки управления Um(t) - на выходе шестого сумматора 5. На выходах датчика угловой скорости 29 и датчика угла ориентации 33 формируются соответственно угловая скорость
вращения космического аппарата 28 и угол ориентации φ(t).
Сигнал приращения ΔJ(t) значения момента инерции J(t) космического аппарата 28 является функцией рассогласования ε(t):

и сигнала задания φз(t).
Сигнал оценки внешнего момента (помехи)  формируется с помощью десятого сумматора 21, пятого нормально-замкнутого переключателя 22, четвертого интегратора 14, шестого сумматора 5 и модели двигателя-маховика 4.
формируется с помощью десятого сумматора 21, пятого нормально-замкнутого переключателя 22, четвертого интегратора 14, шестого сумматора 5 и модели двигателя-маховика 4.
Теперь можно использовать математическую модель ОКО 15 в качестве датчика угловой скорости 29 и датчика угла 33, если одновременно разомкнуть нормально-замкнутые переключатели 22, 37, 34, 31 и 32 и замкнуть нормально-разомкнутые переключатели 10 и 11.
Математическую модель ОКО 15 при этом целесообразно использовать в качестве датчиков угловой скорости 29 и угла ориентации 33 до тех пор, пока ошибка ε(t) будет в пределах допустимых значений, что определяется, очевидно, изменениями внешней помехи Mв(t) и значения момента инерции J(t) космического аппарата 28.
Таким образом, соединение ОКО 7 и математической модели ОКО 15 позволяет сформировать сигнал коррекции Uк(t)для математической модели ОКО 15 и сигнал ΔU(t), имитирующий действие сигнальной помехи в виде момента Mв(t).
В результате выходы φ и  на выходах соответственно ОКО 7 и математической модели ОКО 15 в конце переходного процесса совпадают. Это позволяет использовать математическую модель ОКО в качестве идентификатора параметра J(t) и фазовых координат φ(t) и
.
на выходах соответственно ОКО 7 и математической модели ОКО 15 в конце переходного процесса совпадают. Это позволяет использовать математическую модель ОКО в качестве идентификатора параметра J(t) и фазовых координат φ(t) и
.
Однако в этом случае ОКО 7 работает с ошибкой ε0(t)=φ-φm, где φ - выход ОКО 7, а φm - выход эталонной модели ОКО 35.
Выход φ(t) содержит статическую ошибку ε1(t), как это отмечается в [1]. Ошибка эта вызвана действием возмущающего момента Mв(t), которая на вход эталонной модели ОКО 35 не поступает.
Формирование сигнала коррекции 
 ,
,
где λ0,  ,
,  , определяют качество переходных процессов и ошибку устройства ориентации.
, определяют качество переходных процессов и ошибку устройства ориентации.
При этом сигналом  корректируются сигналы задания как ОКО 7, так и математической модели ОКО 15, чтобы в них компенсировать ошибку ε0(t).
корректируются сигналы задания как ОКО 7, так и математической модели ОКО 15, чтобы в них компенсировать ошибку ε0(t).
Реализуется эталонная модель ОКО (показана на фиг.2) в виде соединения элементов схемы 45, 46, 50, 51, 52, 53, 54 и 55, полностью повторяющих ОКО 7 при условии, что передаточные функции датчика угловой скорости 29 и датчика угла ориентации 33 близки к единице.
Реализация коррекции сигналом
осуществляется с помощью элементов схемы, изображенных на фиг.1: 35÷42.
Эталонная модель ОКО 35 функционирует аналогично ОКО 7. Отличие в том, что на него не действует помеха MB(t).
Формирование сигнала коррекции
для ОКО 7 и математической модели ОКО 15 и его реализация осуществлены подобно коррекции математической модели ОКО 15 сигналом Uк(t).
Использование в способе ориентации космического аппарата и устройства для его реализации канала оценки  и
- математической модели ОКО 15 - позволяет получить технический эффект, который заключается в повышении точности ориентации и надежности функционирования при отказах датчика угла ориентации 33 и датчика угловой скорости 29 вращения космического аппарата 28.
и
- математической модели ОКО 15 - позволяет получить технический эффект, который заключается в повышении точности ориентации и надежности функционирования при отказах датчика угла ориентации 33 и датчика угловой скорости 29 вращения космического аппарата 28.
Изобретательский уровень предложенного технического решения подтверждается отличительными частями формулы изобретения по пп.1 и 2.
Литература
1. Васильев В.Н. Системы ориентации космических аппаратов / В.Н. Васильев. - М.: ФГУП «НПП ВНИИЭМ», 2009. С.149-156 (прототип).
2. Лащев А.Я. Метод синтеза адаптивных систем управления с эталонной моделью. Приборы и системы. Управление, контроль, диагностика. 2007. №1. С.2-6.
Способ грубого управления пространственным движением самолета и система его реализации
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой
Способ грубого управления пространственным движением самолета и система его реализации
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой

