Результат интеллектуальной деятельности: РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА
Вид РИД
Изобретение
Изобретение относится к робототехнике, в частности к манипуляционным системам.
Известен манипулятор модульного типа (А.С. 1174256), содержащий модуль, образованный шестью тягами с приводами, изменяющими длины этих тяг, а также двумя фланцами, в трех точках каждого из которых расположены центры сферических шарниров, связывающих концы тяг фланцами.
Недостатком известной конструкции является ее сложность.
Известна манипуляционная система (Пат. 419421, Швеция), выполненная в виде набора последовательно расположенных и контактирующих друг с другом сферическими поверхностями дисков, кинематически связанных пропущенным через центральные отверстия дисков центрирующим тросом, натянутым упругим элементом, при этом в дисках по периферии имеются четыре отверстия, через которые пропущены управляемые тросы, каждый из которых прикреплен к дальнему от основания диску и связанные попарно с приводами, расположенными в основании.
Недостатком известной конструкции является ограниченные функциональные возможности, обусловленные возможностью изгиба системы только в виде дуги.
Технический результат изобретения - расширение функциональных возможностей путем увеличения количества степеней подвижности за счет введения в систему дополнительного гибкого звена.
Указанный технический результат достигается тем, что робототехническая система содержит гибкое звено, выполненное в виде набора последовательно расположенных и контактирующих друг с другом сферическими поверхностями дисков, кинематически связанных, пропущенными через центральные отверстия дисков, центрирующим тросом, натянутым упругим элементом, при этом в дисках по периферии имеются четыре отверстия, через которые пропущены управляемые тросы, каждый из которых прикреплен к дальнему от основания диску и связанные попарно с приводами, расположенными в основании, причем дальний от основания диск является основанием дополнительного гибкого звена, также выполненного в виде набора последовательно расположенных дисков, при этом их управляемые тросы связаны со своими, расположенными в основании первого гибкого звена, приводами через оболочку, обходящую первое гибкое звено.
Сущность изобретения поясняется чертежами, где:
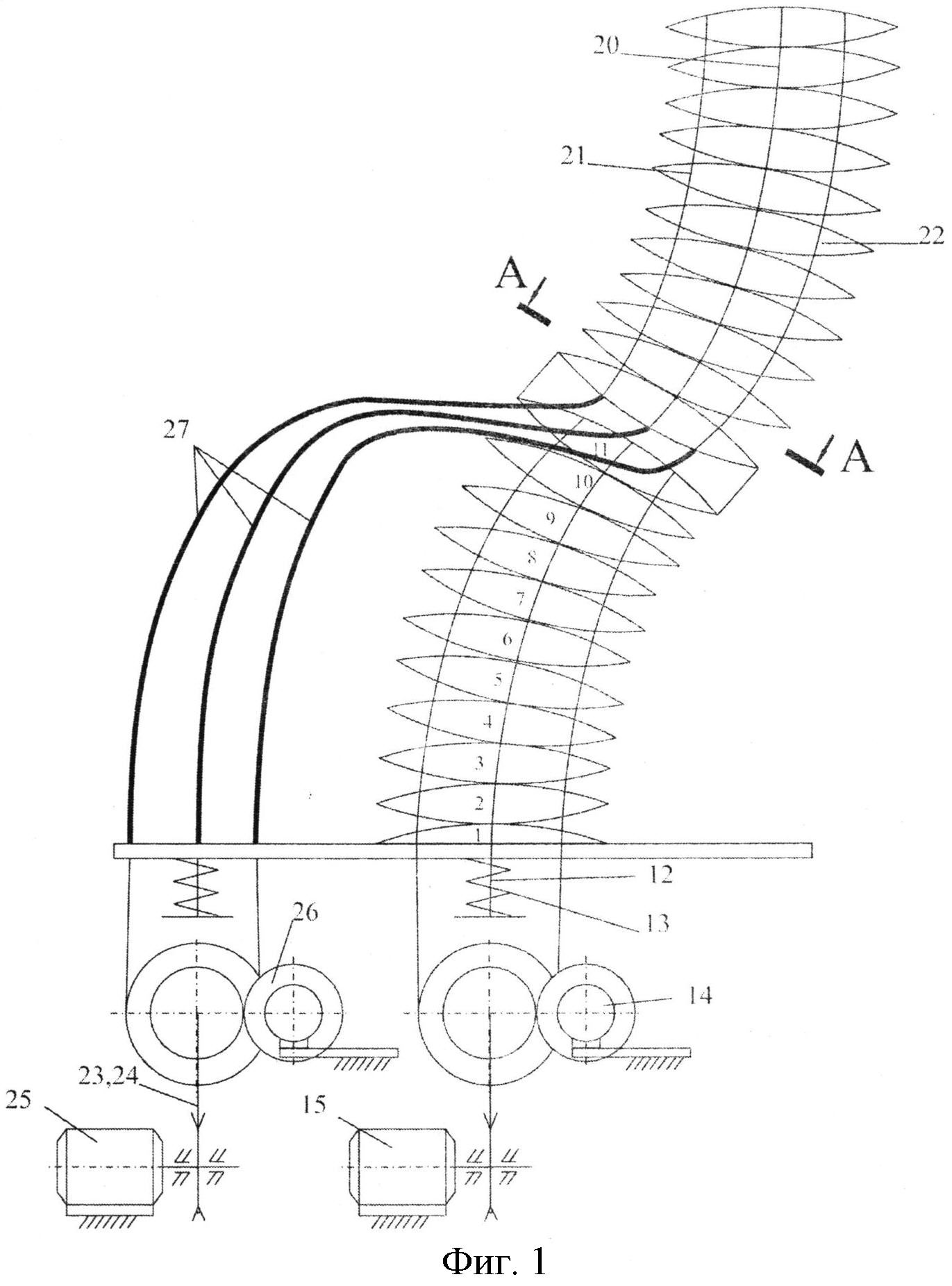
на фиг. 1 изображена робототехническая система,
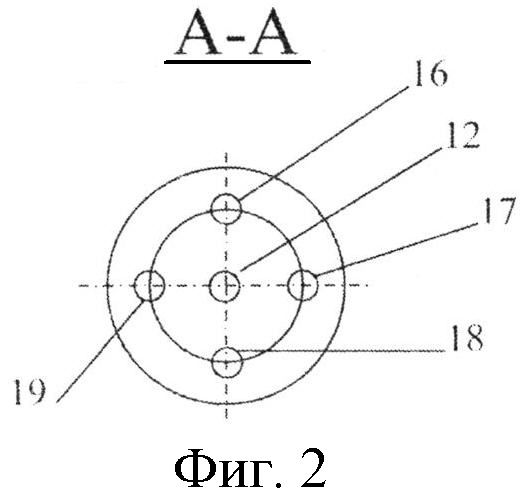
на фиг. 2 - сечение А-А на фиг. 1,
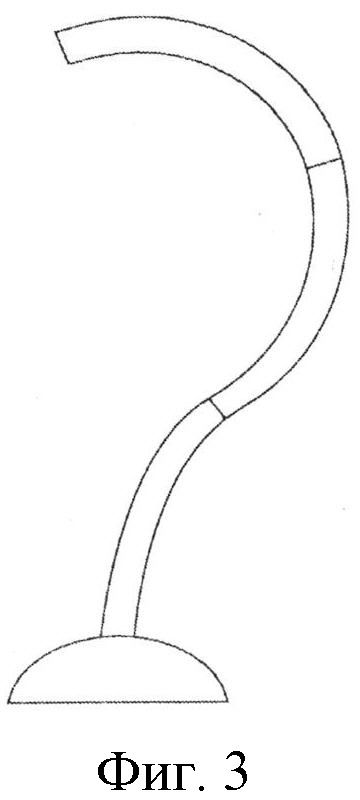
на фиг. 3 - робототехническая система с двумя дополнительными гибкими звеньями.
Робототехническая система содержит последовательное соединенные основное и дополнительное гибкие звенья.
Основное гибкое звено состоит из набора дисков 1-11, контактирующих друг с другом сферическими поверхностями. В дисках звена имеются отверстия: четыре по периферии диска и одно вдоль оси. Через эти отверстия пропущены тросы, каждый из которых прикреплен к дальнему от основания диску 11. Центральный трос 12 натянут упругим элементом 13 и образует с ним механизм натяжения, одновременно выполняя функции центрирования дисков 1-11. Периферийные тросы 16-19 попарно 17 и 19, 16 и 18 связаны с управляемыми приводами 14 и 15. Последний диск 11 является основанием дополнительного гибкого звена, выполненного конструктивно аналогично основному гибкому звену, при этом его центральный 20 и периферийные тросы 21-24 связаны с своими управляемыми приводами 25 и 26, расположенными в основании основного гибкого звена, через оболочки 27, обходящими основное гибкое звено.
Робототехническая система может содержать несколько дополнительных гибких звеньев.
Робототехническая система работает следующим образом. Приводами 14 и 15, 25 и 26 осуществляется натяжение соответствующих периферийных тросов 16-19 и 21-24, при этом происходит деформация гибких звеньев. Каждому набору положений приводов соответствует некоторая деформация гибких звеньев.
Последовательный набор таких звеньев, состоящих из простых и одинаковых элементов, обеспечивает возможность вынесения всех приводов на основание, что позволяет создавать чрезвычайно гибкие манипуляционные системы.
Система ходовая лесозаготовительной машины
Муфта предохранительная
Фрикционная муфта
Муфта предохранительная
Способ укоренения клюквы болотной на минеральных почвах
Устройство для заготовки хвойной лапки
Способ гидрографической оценки антропогенно измененных частей речной сети по численности водотоков
Кран для подъема грузов в оконный проем, на лоджии и балконы строящихся и ремонтируемых зданий
Машина лесозаготовительная
Способ испытания травы газона от затенения деревьями
Способ ввода расходуемого электрода в воздушно-алюминиевый источник тока
Гидроимпульсатор
Отсечный клапан
Устройство для производства арболита
Устройство для пересадки подроста
Ручной плоскорез-рыхлитель
Станок для распиловки лесоматериалов
Свч-камера для сушки шпона
Гидроимпульсатор
Способ оценки точности двигательных действий спортсмена игровых видов спорта

