Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ТРУБОПРОВОДОВ ДВУХ ОБЪЕКТОВ
Вид РИД
Изобретение
Устройство для соединения трубопроводов двух объектов предназначено для соединения пневмогидравлических систем терморегулирования или заправки орбитальных космических станций для соединения узлов и объектов при внекорабельной деятельности.
Известено устройство для соединения трубопроводов (патент РФ N2163989, F16В 2/16), включающее стыкуемые стационарный корпус с резьбой и сменный корпус с нажимной гайкой и установленными в корпусах штуцерами, в каждом из которых закреплен клапан - в стационарном корпусе каждый клапан на эластичном герметизирующем демпфере, телескопически сопрягаемыми при состыковке с ответными клапанами в сменном корпусе.
Недостатком является необходимость прикладывания больших усилий при ручной состыковке для обеспечения соосности совмещаемых при состыковке пневмогидравлических элементов (штуцеров) и усилий на обеспечение открытия клапанов в магистралях при стыковке, если данное устройство входит в крупногабаритную панель значительной массы для стыковки с блоками станции, например в доставляемый радиатор системы терморегулирования. Для космонавта существует требование по ограничению прикладываемых усилий при работе 5 кгс. Кроме того, данная конструкция не позволяет производить при необходимости подключение или отключение групп или отдельных линий магистралей - все линии подключаются при стыковке и отключаются при расстыковке. Отключение линий должно производиться дополнительными устройствами, установленными в пневмо- или гидравлической схеме, что влечет увеличение габаритов и массы объектов. Данная необходимость может возникнуть при разгерметизации отдельных линий и необходимости подключения дублирующих (резервных) линий.
Наиболее близким техническим решением является устройство для соединения трубопроводов (патент РФ №2221187, кл. F 16 L 39/00), включающее в себя стационарный и сменный корпусы с расположенными в них каналами, перекрытыми подпружиненными клапанами, и замковое устройство с ручным приводом в виде захватываемого упора конической формы, закрепленного в стационарном корпусе, гильзой с коническим захватом, подпружиненный шариковый сепаратор с шариками. Ручной привод в виде двух пар эксцентриков, расположенных на оси, и соединенных с рукояткой ручного привода, наружной парой открывает отжимные клапаны через подпружиненную шайбу, а внутренней парой эксцентриков стягивает стационарный и сменный корпусы через упругий элемент. За одно перемещение рычага космонавт должен создать усилие и произвести работу по обеспечению стыковки и закреплению сменного корпуса с пристыкованному к нему агрегату значительной массы, созданию герметичного стыка и открытию клапанов по всем магистралям. Кулачковый механизм, примененный в устройстве для соединения трубопроводов, является преобразующим механизмом, изменяющим характер движения из вращательного в поступательное. Максимальная величина (длина) перемещения космонавтом в скафандре за одно движение не более 60 см, что при вращении рукоятки механизма на 180 град определяет величину рукоятки около 30 см. При ограничивающем усилии 5 кгс величина возможной произведенной работы составит πr·Р=471 кгс·см, где π=3,14, r=30 см, Р=5 кгс. Для закрепления многоштуцерного соединения, например, массой 20 кгс, и обеспечения герметичности плоского стыка потребуется при возможных ударных нагрузках до 100 единиц усилие пружины 2000 кгс при ходе сжатия 0,3-0,5 см, что соответствует работе 600-1000 кгс·см. Для открытия, например, 6 разъемов с площадью сечения 10 см2 каждого при давлении в системе 5 кгс/см2 и пружинами по 20 кгс с ходом открытия 2 см потребуется 840 кгс·см. Суммарно 1840 кгс·см, что значительно больше возможных πr·Р=471 кгс·см.
Ввиду невозможности за одно движение произвести значительную работу, недостатком данной конструкции является создание малого усилия стягивания стационарного и сменного корпусов, недостаточное для обеспечения герметичности плоского стыка при ручной состыковке ввиду ограничения прикладываемых усилий при работе, а также малая надежность по обеспечению герметичности плоского стыка при значительных пристыкованных массах на большом плече при ударных нагрузках при стыковках объектов к станции, что приводит к раскрытию плоского стыка и негерметичности. Кроме того, необходимо дополнительное усилие на выравнивание штуцеров и преодоление усилия по демпфируемым кольцам.
Также необходимо значительное усилие открытие клапанов по n гидроразъемам - на преодоление усилия от давления по площади клапанов и усилие по преодолению усилия пружин по отжимным клапанам. За одно движение надо произвести значительную работу и приложить большое усилие, которое космонавт не сможет произвести при значительных стыкуемых массах и большом количестве соединяемых магистралей.
Также данная конструкция не позволяет производить при необходимости подключение или отключение групп или отдельных линий магистралей - все линии подключаются при стыковке и отключаются при расстыковке. Отключение линий должно производиться дополнительными устройствами, установленными в пневмо- или гидравлической схеме, что влечет увеличение габаритов и массы объектов. Данная необходимость может возникнуть при разгерметизации отдельных линий и необходимости подключения дублирующих (резервных) линий.
Техническим результатом предлагаемой конструкции является обеспечение проведения ручных операций захвата, стягивания, стыковки и закрепления объектов больших масс со значительными моментами инерции, обеспечение соосности сопрягаемых штуцеров, открытие большого количества магистралей с обеспечением надежной герметизации по радиальным уплотнениям.
Сущность изобретения заключается в том, что в устройстве для соединения трубопроводов двух объектов, содержащем установленные на стационарном корпусе одного объекта и сменном корпусе другого объекта замковое устройство с ручным приводом, телескопически сопрягаемые штуцеры с подпружиненными клапанами и подводящие каналы, в каждом штуцере сменного корпуса установлен поршень с подпружиненным отжимным клапаном и в поршне выполнено окно, соединяющее входную полость подводящего канала и внутреннюю полость поршня, при этом на поршне установлены уплотнительные элементы вне зоны окна, а в каждый штуцер сменного корпуса установлен соосно оси штуцера приводной механизм перемещения поршня с ручным приводом с возможностью перемещения поршня от уровня стыкуемой поверхности сменного корпуса до сообщения штуцера сменного корпуса с входом в подводящий канал посредством окна поршня.
Сущность изобретения поясняется чертежами.
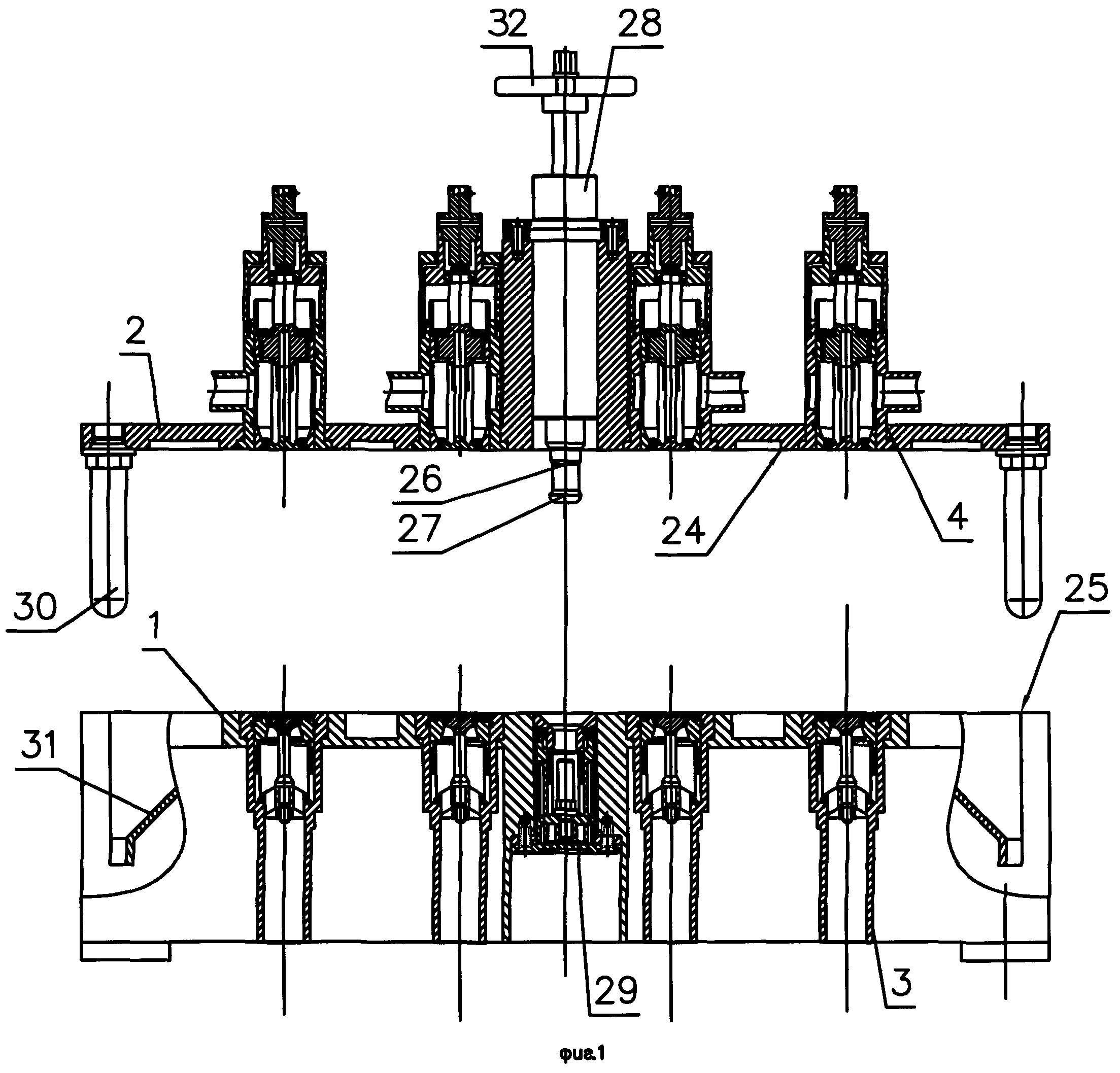
На фиг.1 изображено устройство для соединения трубопроводов в расстыкованном положении стационарного и сменного корпусов.
На фиг.2 изображена часть устройства со штуцерами для соединения трубопроводов в расстыкованном положении стационарного и сменного корпусов.
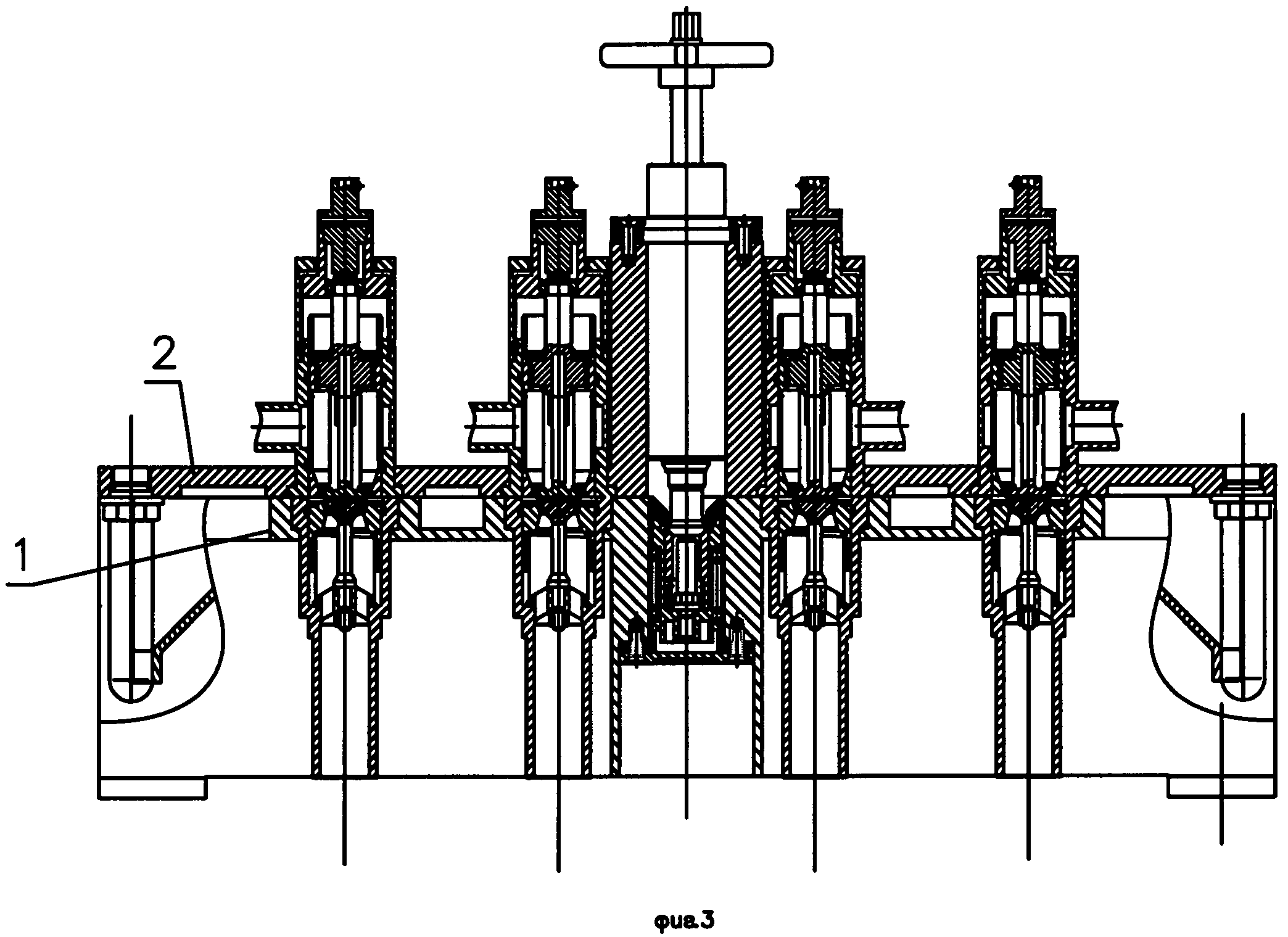
На фиг.3 изображено устройство для соединения трубопроводов в состыкованном положении корпусов до перемещения поршней в ответные штуцеры стационарного корпуса.
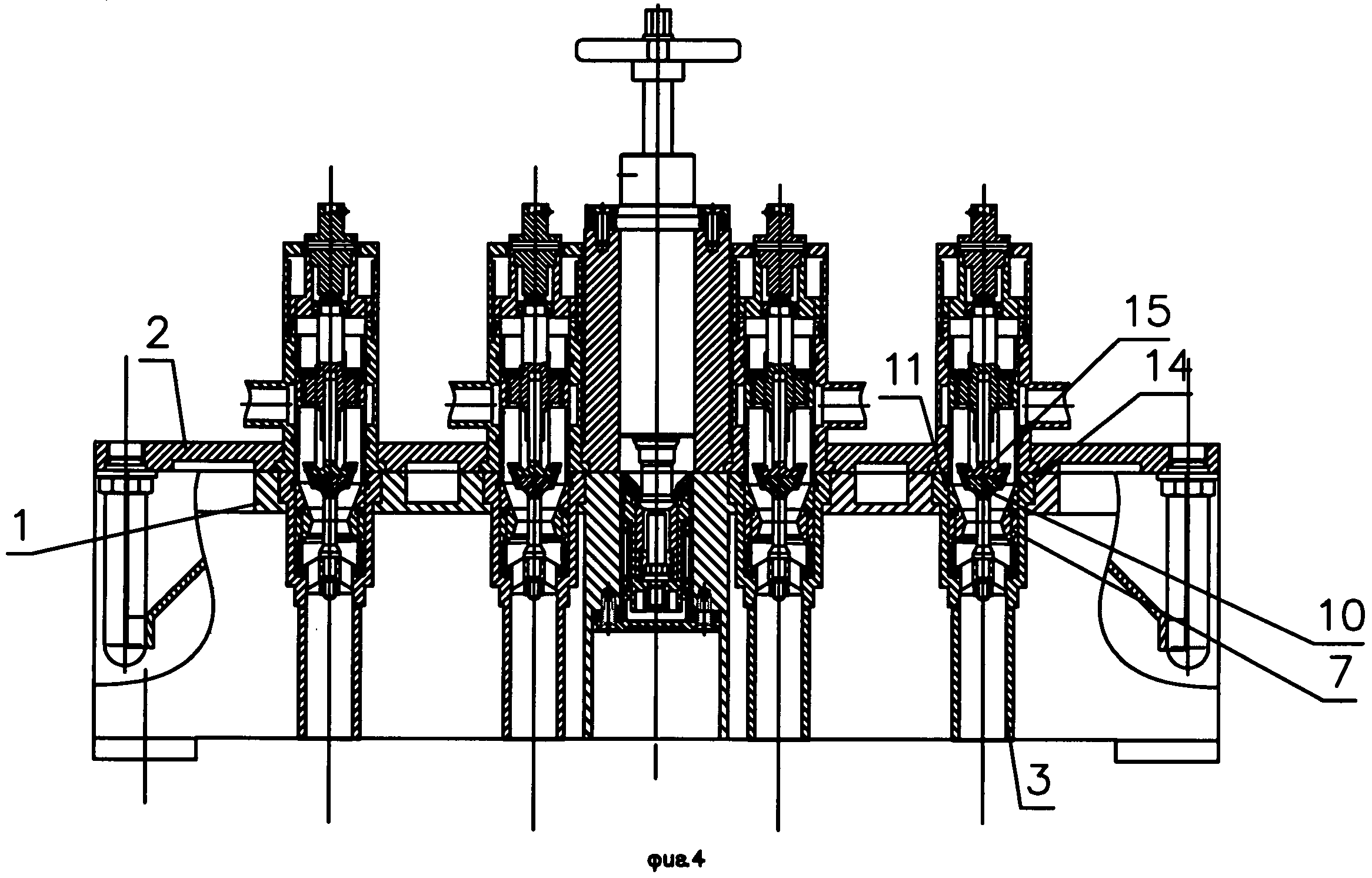
На фиг.4 изображено устройство для соединения трубопроводов в состыкованном положении корпусов после перемещения поршней в ответные штуцеры стационарного корпуса.
Устройство для соединения трубопроводов двух объектов состоит из стационарного корпуса 1 и сменного корпуса 2 (см. фиг.1), и установленными на стационарном корпусе 1 штуцерами 3 и стационарном корпусе 2 штуцерами 4, телескопически сопрягаемыми при состыковке. Каждый штуцер 3 (см. фиг.2) имеет ребра 5, на которых установлен неподвижный клапан 6. В штуцере 3 установлена подпружиненная втулка 7, поджатая пружиной 8. В разъединенном положении (см. фиг.2) пружина 8 поджимает втулку 7 конической поверхностью 9 к конической тарели 10 клапана 6. В штуцере 3 выполнена проточка 11 и установлен уплотнительный элемент 12 (кольцо круглого сечения) для герметизации втулки 7 по штуцеру 3. У каждого штуцера 4 сменного корпуса 2 выполнен подводящий канал 13 и в штуцере 4 установлен с возможностью перемещения поршень 14 с установленным в нем отжимным клапаном 15. Пружина 16 поджимает клапан 15 к конусной поверхности 17 поршня 14. В поршне 14 выполнены окна 18 для соединения входной полости и внутренней полости поршня с подводящим каналом 13. В штуцере 4 выполнены две проточки и установлены уплотнительные элементы 19 (кольца круглого сечения) для герметизации поршня по внутренней поверхности штуцера 4. В штуцер 4 введен приводной механизм с ручным приводом в виде винта 20 по резьбе штуцера 4. Хвостовик 21, закрепленный на поршне 14, входит в винт 20 и закрепляется на нем стопорным кольцом 22. На винте 20 закреплен наконечник 23 для пристыковки ключа ручного управления. Штуцер 4 крепится на сменном корпусе 2, например болтами (не показано). Штуцеры 4 и поршни 14 на сменном корпусе 2 в расстыкованном положении не выходят за стыкуемую плоскость 24 сменного корпуса 2, а штуцеры 3 с клапанами 6 и втулками 7 не выходят за стыкуемую плоскость 25 стационарного корпуса 1. Стыкуемые плоскости 24 сменного корпуса 2 и 25 стационарного корпуса 1 необязательно должны иметь сплошную поверхность, они могут иметь поверхности лежащие в одной плоскости, по которым проводится состыковка. Замковое устройство соединяет два корпуса стационарный 1 и сменный 2 и состоит, например, из захватываемого упора 26, на котором выполнен буртик 27 (см. фиг.1), управляемого винтовым приводом 28 и установленного в сменном корпусе 2, и захватывающего механизма 29, в виде шарикового замка, установленного в отверстие стационарного корпуса 1. Корпусы стационарный 1 и сменный 2 снабжены известными устройствами юстировки, например направляющими штырями 30 и ответными полуконусами 31 для совмещения и соосного расположения штуцеров во время и после стыковки корпусов перед открытием прохода по магистралям.
Устройство работает следующим образом.
В исходном положении (см. фиг.1) стационарный корпус 1 и сменный корпус 2 расположены на расстоянии друг от друга, при этом стационарный корпус 1 закреплен на объекте, например орбитальной станции, а сменный корпус 2 закреплен на доставляемом отсеке или блоке (не показано). Штуцеры 4 и их поршни 14 на сменном корпусе 2 не выходят за стыкуемую плоскость 24. При сближении для стыковки устройство для юстировки в виде штырей 30, расположенных на сменном корпусе 2, и приемных полуконусов 31, расположенных на стационарном корпусе 1, выравнивает по осям стационарный 1 и сменный 2 корпусы. Захватываемый упор 26 скользит по воронке захватывающего механизма 29 и входит в его отверстие. Захватывающий механизм 29 фиксирует упор 26. Так как штуцеры 4 на сменном корпусе 2 не выходили за стыкуемую плоскость 24 сменного корпуса 2 и не требовали усилий на преодоление несоосностей, а также усилий на открытие N отжимных клапанов и на деформацию сжимаемых уплотнений, то космонавт может перемещать при стыковке объекты значительной массы до обеспечения захвата замком. При вращении маховика 32 винтовой привод стягивает и перемещает стационарный 1 и сменный 2 корпусы до соединения по плоскостям 24 и 25. При сближении происходит дальнейшая юстировка и стационарный 1 и сменный 2 корпусы точно совмещаются по осям, при этом штуцеры 3 и штуцеры 4 также точно совмещаются по осям (см. фиг.3). При затягивании маховика 32 за счет винтового соединения происходит прочное соединение стационарного 1 и сменного 2 корпусов. Как и при юстировке и захвате, так и при стыковке штуцеры 4 не выходили за плоскость сменного корпуса 2 и не мешали проведению стыковки, также не требовалось дополнительное усилие на соединение телескопически сопрягаемых штуцеров 3 и 4 в момент стыковки, преодоление усилия от давления и пружин при открытии клапанов в штуцерах 3 и 4. Усилие от космонавта затрачивалось только на стыковку и крепление корпусов.
Для соединения магистралей штуцеров 3 и 4 поочередно вращаются наконечники 23 приводного механизма, например переставляемым маховиком (на чертеже не показано). Приводной механизм с ручным приводом в виде винта 20 по резьбе штуцера 4 перемещает поршень 14 с установленным в нем отжимным клапаном 15 в сторону штуцера 3. При упоре поршня 14 в подпружиненную втулку 7 происходит герметизация по их торцам, и он отодвигает втулку 7. При небольшом перемещении поршня 14 и втулки 7, после герметизации по их торцам, отжимной клапан 15 упирается в коническую тарель 10 клапана 6. При дальнейшем перемещении поршня 14 и втулки 7 до упора торца втулки 7 в торец штуцера 3 происходит полное открытие проходного сечения магистралей по штуцерам 3 и 4 (см. фиг.4), при этом поршень 14 входит в полость штуцера 3 и герметизируется уплотнительным элементом 12 (кольцом круглого сечения), обеспечивая радиальное уплотнение. За счет винтового соединения при поочередном открытии магистралей космонавт затрачивает усилие, не превышающее эргонометрические нормы для работ при внекорабельной деятельности.
При воздействии значительных динамических нагрузок на пристыкованный с помощью предложенного узла стыковки объект, имеющий значительную массу, и даже при появлении от этих нагрузок и зазоров между плоскостями 24 сменного корпуса 2 и стыкуемой плоскостью 25 стационарного корпуса 1, за счет обеспечения радиального уплотнения обеспечивается герметичность по стыкуемым магистралям. В прототипе возможно раскрытие плоского стыка и образование негерметичности при динамических нагрузках.
Кроме того, за счет наличия в каждом штуцере индивидуального привода выдвижения штуцеров и открытия магистралей, это позволяет при необходимости использовать штуцеры как запорные элементы и иметь дополнительную возможность для подключения и отключения отдельных линий, например при разгерметизации одной из линий радиатора отключить эту линию и использовать другую резервную.
Таким образом, предложенное техническое решение позволяет произвести пристыковку объекта значительной массы при ручной стыковке, его закрепление, открытие Н магистралей и обеспечить герметизацию магистралей при значительных динамических нагрузках.
Устройство для соединения трубопроводов двух объектов, содержащее установленные на стационарном корпусе одного объекта и сменном корпусе другого объекта замковое устройство с ручным приводом, телескопически сопрягаемые штуцеры с подпружиненными клапанами и подводящие каналы, отличающееся тем, что в каждом штуцере сменного корпуса установлен поршень с подпружиненным отжимным клапаном и в поршне выполнено окно, соединяющее входную полость подводящего канала и внутреннюю полость поршня, при этом на поршне установлены уплотнительные элементы вне зоны окна, а в каждый штуцер сменного корпуса установлен соосно оси штуцера приводной механизм перемещения поршня с ручным приводом с возможностью перемещения поршня от уровня стыкуемой поверхности сменного корпуса до сообщения штуцера сменного корпуса с входом в подводящий канал посредством окна поршня.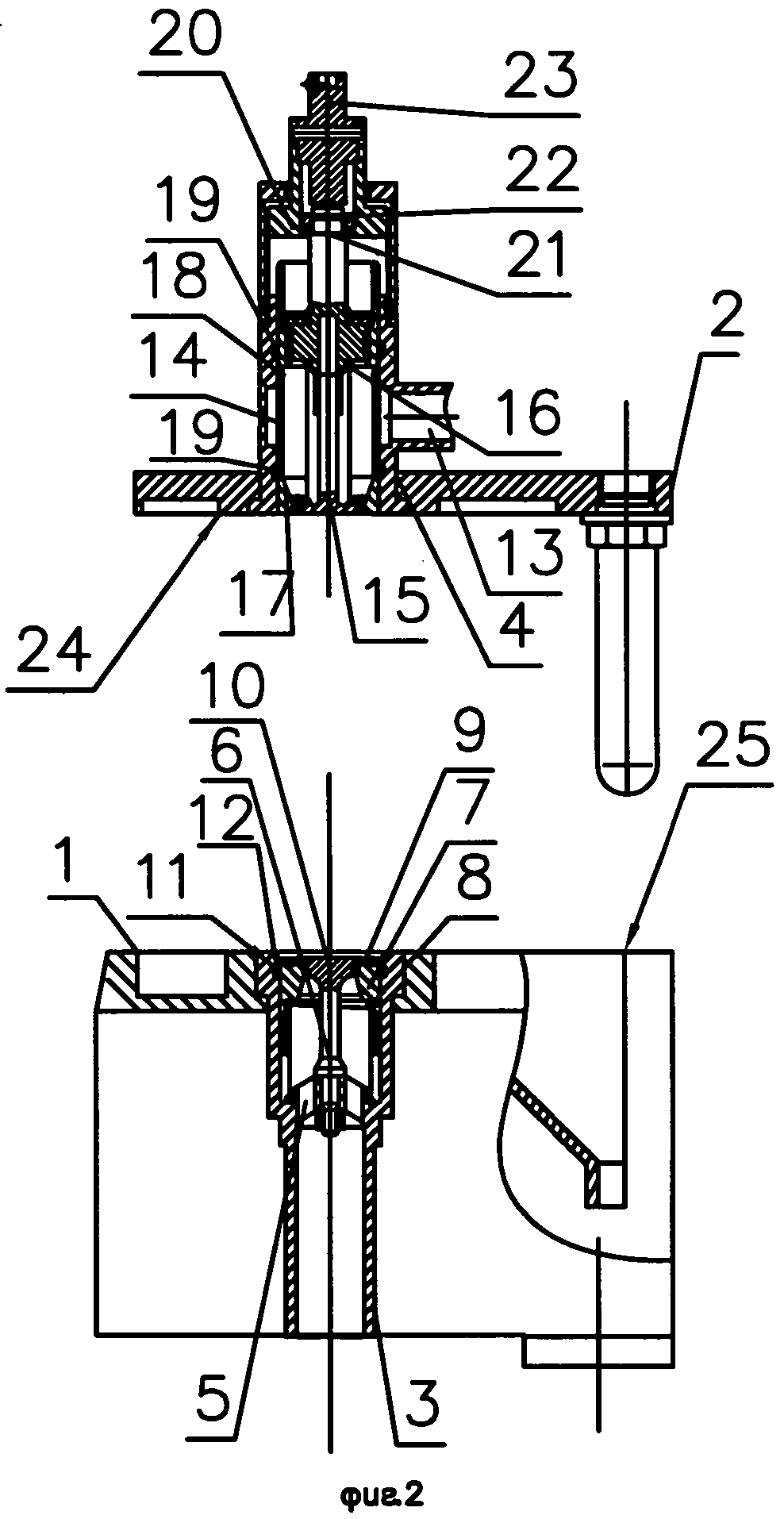
Устройство крепления и расфиксации развертываемых панелей
Способ управления космическим аппаратом для облёта луны
Космический модуль
Способ формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями
Электропривод
Камера сгорания жидкостного ракетного двигателя
Устройство укладки гибкого протяженного по длине элемента в космических условиях и способ его эксплуатации
Центробежное рабочее колесо
Электронасосный агрегат
Быстроразъемный агрегат
Способ определения деформации корпуса космического аппарата в полете
Устройство защиты и контроля состояния оптических поверхностей объектива оптического прибора
Электрохимический генератор
Устройство защиты и контроля состояния оптических поверхностей в фокальной плоскости объектива оптического прибора
Способ управления космическим аппаратом для облёта луны
Способ управления транспортной космической системой
Устройство крепления и расфиксации развертываемых панелей
Способ управления космическим аппаратом для облёта луны
Космический модуль
Способ формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями

