Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ
Вид РИД
Изобретение
Изобретение относится к области транспортного машиностроения и может быть использовано при синтезе систем управления движением быстроходных гусеничных машин (БГМ), оснащенных гидромеханической трансмиссией (ГМТ) и дифференциальным механизмом поворота с гидрообъемным приводом.
Известна система управления поворотом БМП Marder (Бурцев С.Е. "Основы применения гидрообъемных вариантов типовых трансмиссий". 1983. Изд-во Киевское ВТИУ, рис.3.41, стр.200), которая содержит гидропривод, включающий гидронасос кинематически через редуктор соединенный с двигателем, а гидромотор соединен с дифференциальным механизмом, ведомые элементы которого соединены с солнечными шестернями суммирующих планетарных рядов трансмиссий. Параллельно гидроприводу включена гидромуфта с регулируемым в процессе поворота наполнением - это обеспечивает высокую управляемость движения гусеничной машины, в том числе при входе в поворот и в процессе движения в повороте. Основным недостатком этой системы является недостаточное быстродействие, особенно при выходе из поворота, большая длительность переходных процессов, приводящая к режиму эволюционного движения.
Наиболее близкой по технической сути и достигаемому результату является автоматизированная система управления движением (Держанский В.Б., Тараторкин И.А. Алгоритмы управления движением транспортной машины: Монография. - Курган: Изд-во Курганского гос. ун-та, 2010, - 142 с., рис.2.20, стр.116), реализующая адаптивное оптимальное управление, которая содержит измерители управляющих воздействий (угол поворота штурвала, перемещений педалей подачи топлива), а также угловой скорости вала двигателя, скорости движения, которые электрически соединены через аналого-цифровой преобразователь (АЦП) с бортовой микроЭВМ, формирующей заданную угловую скорость поворота. Этот сигнал с выхода бортовой микроЭВМ подается на электромагнит гироскопического датчика «угловая скорость - ускорение». Выходы гироскопического датчика, измеряющие отклонение угловой скорости, продольное и боковое ускорения, соединены через АЦП с бортовой микроЭВМ, а выходы, измеряющие заданную угловую скорость (управляющее воздействие) и отклонения угловой скорости от заданной, соединены с двухканальным анализатором спектра, который на основе быстрого преобразования Фурье определяет спектральные плотности управляющего воздействия и отклонения угловой скорости, которые вводятся в бортовую микроЭВМ через АЦП.
При движении без бокового заноса бортовая микроЭВМ формирует оптимальное управление и передает сигнал к электрогидравлическому усилителю, который через дифференциальный рычаг перемещает орган управления гидрообъемным приводом и компенсирует отклонение. При возникновении бокового заноса и допустимости движения по приближенной траектории на основе решения обратной задачи динамики бортовая микроЭВМ формирует параметры (курсовой угол и угловую скорость), обеспечивающие движение без заноса. Величина этого сигнала передается к блоку управления электрогидравлического усилителя. При недопустимости движения по приближенной траектории сигнал с бортовой микроЭВМ передается к серводвигателю для автоматического снижения скорости.
Основной недостаток существующей системы состоит в том, что реакция на отклонение траектории и условие возникновения бокового заноса формируется по данным о боковых скоростях и ускорениях от датчиков, установленных на корпусе машины, в то время как разность во времени между появлением этих ускорений и задающим воздействием водителя велика, то есть в системе имеется время чистого запаздывания, которое оказывает влияние на общую динамику гусеничной машины и ее управляемость.
Другой недостаток заключается в том, что ПИД-регулятор, применяемый в ней, работает наиболее эффективно в том случае, если задающие воздействия являются гармоническими. Однако в действительности управляющие воздействия водителя даже при движении на тестовых змейках не являются таковыми. Они приводят к дополнительным нежелательным колебаниям реакции машины как объекта управления с упруго-инерционными свойствами. Кроме того, недостаточная эффективность ПИД-регулятора во многом объясняется тем, что его структура должна обеспечивать выполнение двух противоречивых требований: высокое быстродействие в процессе управления поворотом и в тоже время - минимизацию или снижение колебаний корпуса при прямолинейном движении. Последнее достигается введением в регулятор интегрирующего звена, которое снижает устойчивость системы и увеличивает запаздывание реакции машины в процессе поворота. Эффективность ПИД-регулятора снижается также вследствие вариации параметров конструкции гусеничной машины, входящих в математическую модель и определяющих собственную частоту системы, в соответствии с которой синтезирован регулятор. Кроме того, колебания корпуса машины в горизонтальной плоскости и в системе управления движением - существенно изменяют параметры конструкции машины, приводя к вариации собственной частоты системы и ее демпфирующих свойств. Таким образом, известная система не обладает робастностью, то есть не обеспечивается ее приспособляемость к изменению параметров объекта. Учитывая противоречивость требования по обеспечению быстродействия системы при управлении поворотом, а при прямолинейном режиме движения - интенсивность гашения колебаний корпуса, в систему необходимо ввести идентификатор требуемого режима движения и распараллелить алгоритмы управления движением. В виду существенной вариации параметров конструкции объекта управления, входящих в математическую модель и скоростного режима движения, приводящих к вариации собственной частоты и демпфирующих свойств, необходимо обеспечить робастность системы управления.
В последнее время для систем, у которых управляемые параметры зашумлены или трудноизмеряемы, разрабатываются Shaping-алгоритмы управления. Одним из их важных преимуществ является простота их реализации в микропроцессорных системах и системах управления на основе программируемых логических контроллеров.
Для устранения основного недостатка автоматизированной системы управления движением, состоящей из измерителей управляющих воздействий (угол поворота штурвала, перемещений педалей подачи топлива), а также угловой скорости вала двигателя, скорости движения, которые электрически соединены через аналого-цифровой преобразователь (АЦП) с бортовой микроЭВМ, формирующей заданную угловую скорость поворота, гироскопического датчика, двухканального анализатором спектра, электрогидравлического усилителя, который через дифференциальный рычаг перемещает орган управления гидрообъемным приводом, дополнительно вводятся идентификатор типа задающего воздействия, два Shaper-фильтра, электрически соединенные с гидроприводом датчиками давления через анализатор спектра, регуляторы подавления колебаний и быстродействия, сигнал с которых поступает на гидропривод, через аддитивный сумматор и формирователь сигнала управления.
Принцип работы Shaping-алгоритмов заключается в формировании управляющего сигнала путем свертки задающего управляющего воздействия с последовательностью импульсов в виде дельта-функции Дирака. Количество импульсов, период их следования и амплитуда каждого из них определяет эффективность алгоритма. Алгоритм их работы основан на перераспределении во времени силового воздействия на объект управления при сохранении неизменной величины суммарного воздействия. За счет относительного увеличения времени перехода системы из одного состояния в другое обеспечивается компенсация возникающих колебаний, а сдвиг управляющего воздействия на половину периода вычисленных колебаний объекта управления обеспечивает в идеальном случае полное их подавление.
Синтезируемый алгоритм коррекции управляющего воздействия, реализуемый фильтрами, должен предотвращать возбуждение и гашение нежелательных колебаний, обеспечить требуемое быстродействие, робастность, точность при ограниченных затратах мощности на компенсацию отклонений. Проведенный анализ изменения параметров конструкции машины, входящих в математическую модель динамического процесса управления движением гусеничной машины, показывает, что параметром, характеризующим колебательные процессы, является давление рабочей жидкости в силовых магистралях гидрообъемного привода. В диапазоне давлений от 0 до 45 МПа оно может быть достаточно точно измерено датчиком давления с электрическим выходом. На фиг.2 показан фрагмент осциллограммы, характеризующий изменение давления в процессе входа быстродвижущейся машины в поворот, движения в повороте и выхода из него. Спектральный анализ этого колебательного процесса рабочей жидкости в силовых магистралях гидропривода показывает, что он содержит высокочастотные составляющие, формируемые поршневой группой гидропривода, возмущениями на траковой частоте (зацепление ведущих колес с гусеницами), низкочастотными колебаниями корпуса вокруг вертикальной оси, а также нелинейностью гидропривода, проявляющейся при переходных процессах. Таким образом, предлагаемый параметр является достаточно информативным. Адаптация фильтра может быть осуществлена на основе измерения и обработки сигналов G-сенсора бокового движения.
Вводимый в систему Фильтр класса ZV-Shaper (с так называемой нулевой вибрацией, zero-vibration, ZV) обеспечивает эффективное гашение колебаний при вариации параметров объекта управления, но обладает пониженным быстродействием. Для повышения быстродействия параллельно ZV-Shaper вводится дополнительно фильтр UM-ZV-Shaper (единичного модуля и нулевой вибрации, unity-magnitude zero-vibration, UM-ZV), повышает быстродействие, но снижает эффективность подавления колебаний.
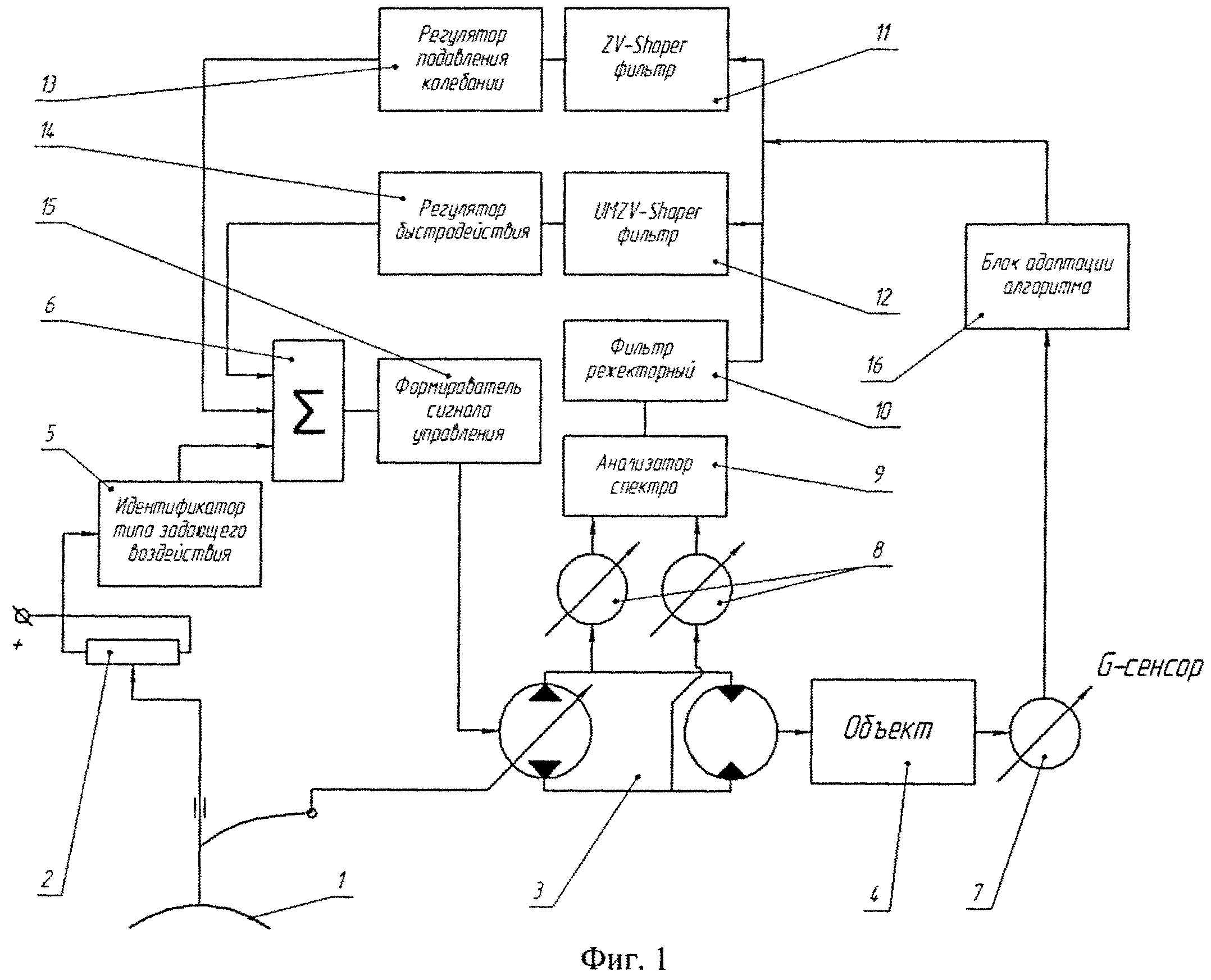
Схема предложенной системы приведена на фиг.1. Система управления состоит из командного органа управления поворотом - штурвала 1, который соединен с сенсором 2 перемещения командного органа управления, а также кинематически через систему тяг соединен с механическим каналом управления регулируемого гидронасоса ГН гидропривода 3. Гидромотор гидропривода 3 кинематически через дифференциальный механизм поворота соединен с ведущими колесами объекта управления 4. С силовой магистралью гидропривода гидравлически соединены датчики давления 8, электронные выходы которых соединены с анализатором спектра 9 и фильтром режекторным 10. Выход фильтра соединен с фильтром ZV-Shaper 11 и UM-ZV-Shaper 12. Выходы фильтров 11 и 12 соединены с регулятором подавления колебаний жидкости 13 и с фильтром регулирования быстродействия 14 соответственно. Выходы обоих регуляторов 13 и 14 соединены со входом аддитивного сумматора 6, который подключен к формирователю сигнала управления 15. Выход G-сенсора 7 через блок адаптации алгоритма 16 соединен со входом фильтров ZV 11 и UM-ZV 12.
Работает предлагаемая система в зависимости от требуемого режима движения в повороте или прямолинейно следующим образом. В том случае, если водитель посредством командного органа управления поворотом - штурвала 1 воздействует на гидропривод 3, изменяя режим его работы, возникают продольные и боковые ускорения корпуса 4. Такие ускорения находятся в зависимости от параметров транспортной машины - инерционных, коэффициентов сопротивления увода, вязкостно-упругих свойств элементов и др., варьирующихся в широких пределах. Так как давление жидкости в силовой магистрали гидропривода 3 находится в сложной зависимости от ускорений корпуса, то после его регистрации датчиками давления 8 и последующей обработки полученных данных анализатором спектра 9 и режекторным фильтром 10 они поступают на входы Shaper-фильтров 11 и 12. Далее раздельно формируются корректирующие воздействия, направленные на подавление колебаний 13 и повышение динамики 14. Одновременно с этим управляющее воздействие водителя, поступающее на штурвал 1, через сенсор перемещения командного органа 2 поступает в блок идентификации типа задающего воздействия 5. В том случае, если угол поворота штурвала αшт>0, то задающее воздействие определяется как "Поворот". В противном случае - "Прямолинейное движение". Электронные выходы блоков 13, 14, 5 подаются на вход аддитивного сумматора 6 и формирователя сигнала управления 15. Итоговое корректирующее воздействие поступает на вход канала управления гидронасоса гидропривода 3. Таким образом в предлагаемой системе реализована "Быстрая" обратная связь. Параллельно этому информация о продольных и боковых скоростях и ускорениях объекта 4, регистрируемая G-сенсором 7, поступает на блок адаптации алгоритма 16. По этим данным определяется разность между расчетными скоростями и ускорениями для конкретного управляющего воздействия и фактическими ускорениями и скоростями. Информация об этом также поступает на входы Shaper-фильтров 11 и 12, тем самым реализуя еще одну обратную связь системы. Благодаря всему этому повышается скорость формирования корректирующих воздействий, повышается управляемость и динамика за счет раздельного регулирования эффектов, вызываемых колебаниями корпуса, и повышается динамика гусеничной машины.
Эффективность предложенного решения заключается в повышении степени реализации потенциальных скоростных качеств машины за счет введения в систему управления дополнительной обратной связи, организованной так, что реакция БГМ на задающее воздействие водителя определяется с меньшим запаздыванием по времени, и, следовательно, уменьшается время на генерацию корректирующего воздействия регулятора системы автоматизированного управления, что приводит к повышению динамики и управляемости гусеничной машины.
Система управления движением быстроходной гусеничной машины, состоящая из командного органа управления поворотом - штурвала, соединенного с сенсором перемещения командного органа управления и кинематически через систему тяг с механическим каналом управления регулируемого насоса гидропривода, гидромотор которого кинематически через дифференциальный механизм поворота соединен с ведущими колесами объекта управления, отличающаяся тем, что в силовой магистрали гидропривода установлены датчики давления, электронные каналы которых подключены к анализатору спектра и фильтру режекторному, соединенному с ZV-Shaper (нулевой вибрации, zero-vibration, ZV) и UM-ZV-Shaper (единичного модуля и нулевой вибрации, unity-magnitude zero-vibration, UM-ZV) фильтрами, подключенными выходами к аддитивному сумматору через регулятор подавления колебаний корпуса и фильтр регулирования быстродействия соответственно, также через блок адаптации алгоритма ко входам фильтров подключен G-сенсор, установленный на объекте.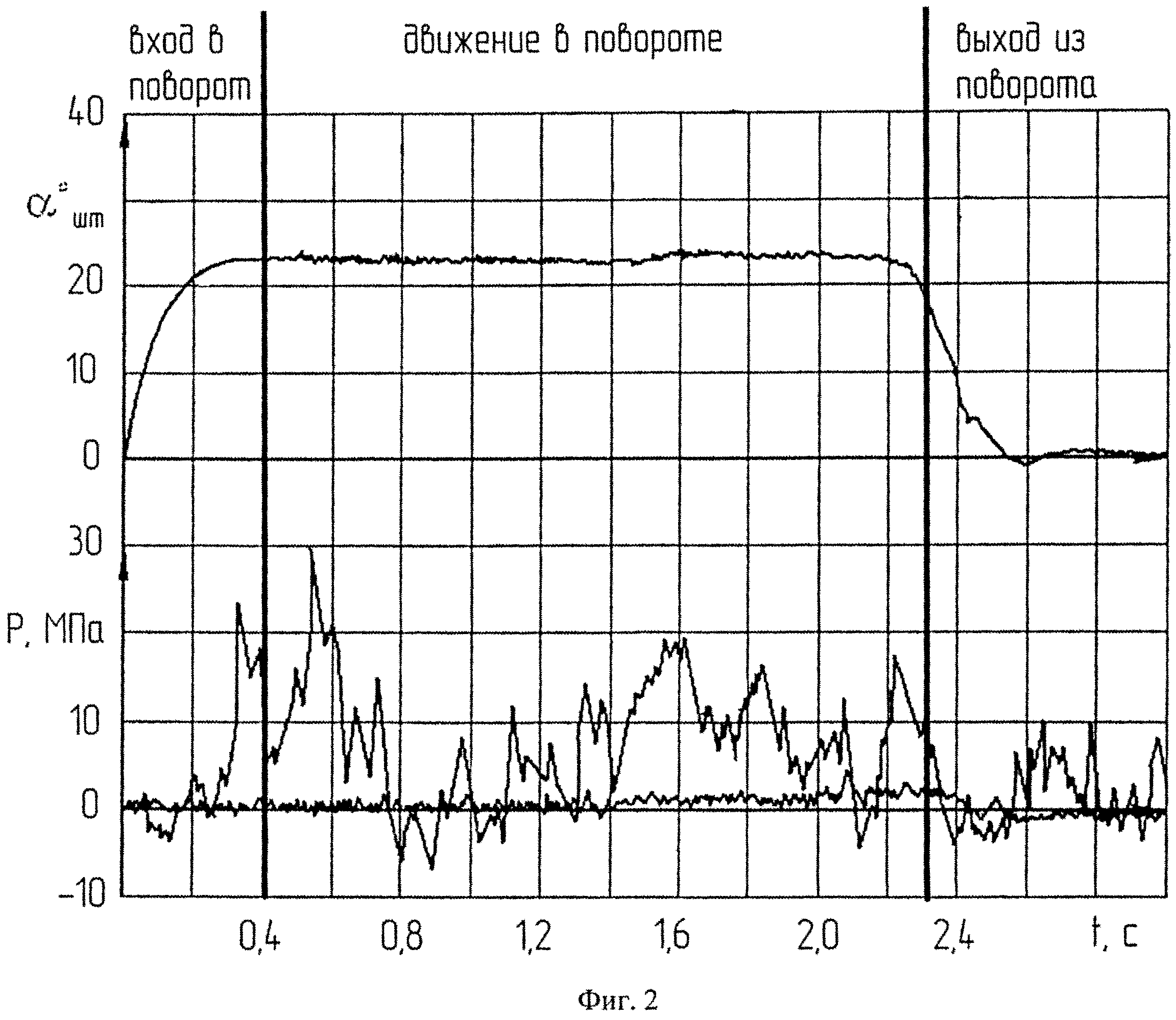
Способ получения сплава, содержащего титан, медь и кремний, и устройство для его осуществления
Способ получения металлического циркония из водной суспензии руды, содержащей соединения циркония, и устройство для его осуществления
Способ получения двухкомпонентного сплава, содержащего медь и кремний, и устройство для его осуществления.
Способ для получения механических колебаний
Способ получения сплава, содержащего алюминий и титан, и устройство для его осуществления.
Восьмиступенчатая трансмиссия колеса
Гусеница с гибкими шарнирами
Резинометаллическая гусеница
Комбинированный мост сдвоенных колес
Способ определения приведенного момента инерции дотрансформаторной зоны гидромеханической трансмиссии транспортной машины
Способ крепления затравки при выращивании монокристаллов методом направленной кристаллизации из расплава в горизонтальном стеклянном вакуумированном контейнере
Крепление авиадвигателя к крылу
Радиатор для отвода тепла от затравки при выращивании монокристаллов в вакуумированной стеклянной ампуле
Способ получения на обрабатываемых изделиях глубоких диффузионных защитных слоев и устройство для его осуществления
Способ получения металлического олова из водной суспензии частиц руды, содержащей соединения олова, и устройство для его осуществления
Способ получения сплава на основе титана из водной суспензии частиц руд, содержащих соединения титана, и устройство для его осуществления
Способ получения металлического свинца из водяной суспензии частиц руды, содержащей соединения свинца, и устройство для его осуществления
Стеклоочиститель
Способ получения металлического цинка из водной суспензии частиц, содержащих соединения этого элемента руды, и устройство для его осуществления
Электрическая машина возвратно-поступательного движения

