Результат интеллектуальной деятельности: ВЫБОРКА ДАННЫХ, СОХРАНЯЕМЫХ В ПАМЯТИ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА
Вид РИД
Изобретение
ПРИТЯЗАНИЕ НА ПРИОРИТЕТ
В соответствии с параграфом 120 раздела 35 Кодекса законов США, настоящая заявка является частичным продолжением совместно рассматриваемой заявки на патент США № 11/343,803, «Surgical Instrument Having Recording Capabilities», поданной 31 января 2006 г. Шелтоном с соавторами (Shelton et al.), описание которой целиком включено в настоящее описание посредством ссылки.
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка связана с нижеперечисленными заявками на патенты США, которые были поданы одновременно с заявкой 11/343,803, упомянутой в предыдущем параграфе, и которые целиком включены в настоящую заявку посредством ссылки:
(1) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH USER FEEDBACK SYSTEM; изобретатели: Frederick E. Shelton, IV, John Ouwerkerk and Jerome R. Morgan, № 11/343,498;
(2) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH LOADING FORCE FEEDBACK; изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan, and Jeffrey S. Swayze, № 11/343,573;
(3) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK; изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan, and Jeffrey S. Swayze, № 11/344,035;
(4) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH ADAPTIVE USER FEEDBACK; изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, and Jerome R. Morgan, № 11/343,447;
(5) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH ARTICULATABLE END EFFECTOR; изобретатели: Frederick E. Shelton, IV and Christoph L. Gillum, № 11/343,562;
(6) MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH MECHANICAL CLOSURE SYSTEM; изобретатели: Frederick E. Shelton, IV and Christoph L. Gillum, № 11/344,024;
(7) SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSURE TRIGGER LOCKING MECHANISM; изобретатели: Frederick E. Shelton, IV and Kevin R. Doll, № 11/343,321;
(8) GEARING SELECTOR FOR A POWERED SURGICAL CUTTING AND FASTENING STAPLING INSTRUMENT; изобретатели: Frederick E. Shelton, IV, Jeffrey S. Swayze, Eugene L. Timperman, № 11/343,563;
(9) SURGICAL INSTRUMENT HAVING A REMOVABLE BATTERY; изобретатели: Frederick E. Shelton, IV, Kevin R. Doll, Jeffrey S. Swayze and Eugene Timperman, № 11/344,020;
(10) ELECTRONIC LOCKOUTS AND SURGICAL INSTRUMENT INCLUDING SAME; изобретатели: Jeffrey S. Swayze, Frederick E. Shelton, IV, Kevin R. Doll, № 11/343,439;
(11) ENDOSCOPIC SURGICAL INSTRUMENT WITH A HANDLE THAT CAN ARTICULATE WITH RESPECT TO THE SHAFT; изобретатели: Frederick E. Shelton, IV, Jeffrey S. Swayze, Mark S. Ortiz, and Leslie M. Fugikawa, № 11/343,547;
(12) ELECTRO-MECHANICAL SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING A ROTARY FIRING AND CLOSURE SYSTEM WITH PARALLEL CLOSURE AND ANVIL ALIGNMENT COMPONENTS; изобретатели: Frederick E. Shelton, IV, Stephen J. Balek and Eugene L. Timperman, № 11/344,021;
(13) DISPOSABLE STAPLE CARTRIDGE HAVING AN ANVIL WITH TISSUE LOCATOR FOR USE WITH A SURGICAL CUTTING AND FASTENING INSTRUMENT AND MODULAR END EFFECTOR SYSTEM THEREFOR; изобретатели: Frederick E. Shelton, IV, Michael S. Cropper, Joshua M. Broehl, Ryan S. Crisp, Jamison J. Float, Eugene L. Timperman, № 11/343,546; и
(14) SURGICAL INSTRUMENT HAVING A FEEDBACK SYSTEM; изобретатели: Frederick E. Shelton, IV, Jerome R. Morgan, Kevin R. Doll, Jeffrey S. Swayze and Eugene Timperman, № 11/343,545.
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к хирургическим инструментами, в частности к минимально инвазивным хирургическим инструментам, способным производить запись различных состояний инструмента.
Эндоскопическим хирургическим инструментам часто отдают предпочтение перед традиционными открытыми хирургическими устройствами, поскольку при меньшем рассечении обычно меньше время послеоперационного восстановления и риск осложнений. Поэтому выполнены важные разработки в области эндоскопических хирургических инструментов, которые пригодны для точного размещения дистального концевого эффектора в заданном операционном поле через канюлю или троакар. Такие дистальные концевые эффекторы (например, эндоскопический режущий инструмент, захват, режущее приспособление, сшивающие скобками аппараты, приспособление для наложения зажимов, устройство доступа, устройство для доставки лекарства генной терапии к месту действия и энергетическое устройство, использующее ультразвук, высокую частоту (RF), лазер и т.д.) захватывают ткань рядом путей для получения диагностического или терапевтического результата.
Известные хирургические степлеры содержат концевой эффектор, который одновременного выполняет продольное рассечение в ткани и накладывает ряды скобок на противоположные стороны рассечения. Концевой эффектор содержит пару согласованно действующих зажимных элементов, которые, если инструмент предназначен для эндоскопического или лапароскопического применения, способны проходить по проходному каналу канюли. Один из зажимных элементов вмещает кассету для скобок, содержащую, по меньшей мере, два поперечно разнесенных ряда скобок. Другой зажимной элемент образует упор, содержащий скобкоформирующие углубления, совмещенные с рядами скобок в кассете. Инструмент содержит множество возвратно-поступательно перемещающихся клиньев, которые, при приведении в движение в дистальном направлении проходят сквозь отверстия в кассете для скобок и входят в контакт с ведущими элементами, служащими опорой для скобок, для выстреливания скобок к упору.
Пример хирургического степлера, подходящего для эндоскопического применения, описан в патенте США № 5465895, «SURGICAL STAPLER INSTRUMENT», выданному Кноуделю с соавторами (Knodel et al.), который дает описание эндоскопического режущего инструмента с разделением смыкающего и выстреливающего действий. Врач, использующий данное устройство, может смыкать зажимные элементы на ткани для расположения ткани перед выстреливанием. После того, как врач определил, что зажимные элементы правильно захватывают ткань, врач может произвести выстреливание из хирургического степлера одним шагом для выстреливания скобок или несколькими шагами для выстреливания скобок, в зависимости от устройства. Выстреливание из хирургического степлера приводит к разрезанию и прошиванию скобками ткани. Одновременное разрезание и прошивание скобками исключает осложнения, которые могут возникать при последовательном выполнении данных действий разными хирургическими инструментами, которые, соответственно, только разрезают или сшивают скобками.
Одно особое преимущество возможности смыкания на ткани перед выстреливаем состоит в том, что врач может проверить через эндоскоп, что требуемое размещение для разрезания обеспечено, в том числе, что между противоположными зажимами захвачено достаточное количество ткани. В противном случае, противоположные зажимы могут быть сведены слишком близко, в частности, с защемлением их дистальных концов, и, следовательно, с неэффективным формированием сжатых скобок в разрезанной ткани. В другом крайнем случае, излишнее количество зажатой ткани может вызвать заедание и неполное выстреливание.
Когда эндоскопические хирургические инструменты выходят из строя, их часто возвращают изготовителю или в другое учреждение для анализа выхода из строя. Если выход из строя привел к дефекту критического класса в инструменте, то изготовителю необходимо определить причину выхода из строя и определить, требуется ли изменение конструкции. В данном случае, изготовитель может затратить много сотен человеко-часов на анализ отказавшего инструмента и на усилия по реконструкции условий, в которых инструмент вышел из строя, на основании только повреждения инструмента. Анализ выходов инструмента из строя описанным способом может быть очень дорогостоящим и сложным. Кроме того, многие из упомянутых анализов просто приводят к заключению, что выход из строя был обусловлен неправильным использованием инструмента.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним общим аспектом, целью настоящего изобретения является процесс и система для загрузки данных датчиков, хранимых в запоминающем устройстве хирургического режущего и скрепляющего инструмента, во внешнее или удаленное компьютерное устройство. В соответствии с различными вариантами осуществления, процесс заключается в сохранении данных из, по меньшей мере, одного датчика хирургического режущего и скрепляющего инструмента в запоминающем устройстве блока управления хирургического режущего и скрепляющего инструмента во время хирургической операции с участием хирургического режущего и скрепляющего инструмента. Затем, после хирургической операции устанавливают линию передачи данных между блоком управления и удаленным компьютерным устройством. Затем, данные из датчика можно загружать из блока управления в удаленное компьютерное устройство. Датчики могут содержать, например: датчик смыкающего спускового механизма, который распознает приведение в действие смыкающего спускового механизма; датчик смыкания упора для распознавания смыкания упора; датчик нагрузки смыкания упора, который распознает нагрузку, оказываемую на кассету для скобок упором, когда упор смыкают; датчик выстреливающего спускового механизма для распознавания приведения в действие выстреливающего спускового механизма; датчик положения ножа для распознавания положения ножа в концевом эффекторе; датчик присутствия кассеты для обнаружения, находится ли кассета в концевом эффекторе; датчик состояния кассеты для обнаружения состояния кассеты; и датчик шарнирного поворота для обнаружения шарнирного поворота концевого эффектора.
ЧЕРТЕЖИ
В настоящей заявке представлены для примера описания различных вариантов осуществления в сочетании со следующими фигурами, на которых:
Фиг. 1 и 2 - виды в перспективе хирургического режущего и скрепляющего инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 3-5 - виды с пространственным разделением деталей концевого эффектора и вала инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 6 - вид сбоку концевого эффектора в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 7 - вид с пространственным разделением деталей рукоятки инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 8 и 9 - местные виды в перспективе рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 10 - вид сбоку рукоятки в соответствии с различными вариантами осуществления настоящего изобретения.
Фиг. 10A и 10B - виды пропорционального датчика, который можно использовать в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 11 - схема электрических соединений схемы, применяемой в инструменте в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 12-13 - виды сбоку рукоятки в соответствии с другими вариантами осуществления настоящего изобретения;
Фиг. 14-22 - изображения различных механизмов для фиксации смыкающего спускового механизма в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 23A-B - изображения универсального шарнира («u-шарнира»), который можно использовать в точке сочленения инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 24A-B - изображение торсионного троса, который можно использовать в точке сочленения инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 25-31 - изображение хирургического режущего и скрепляющего инструмента с усилением в соответствии с другим вариантом осуществления настоящего изобретения;
Фиг. 32-36 - изображение хирургического режущего и скрепляющего инструмента с усилением в соответствии с еще одним вариантом осуществления настоящего изобретения;
Фиг. 37-40 - изображение хирургического режущего и скрепляющего инструмента с тактильной обратной связью в соответствии с вариантами осуществления настоящего изобретения; и
Фиг. 41 - вид с пространственным разделением компонентов концевого эффектора и вала инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 42 - вид сбоку рукоятки инструмента с механическим приводом в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 43 - вид с пространственным разделением компонентов рукоятки инструмента с механическим приводом, показанной на фиг. 42;
Фиг. 44 - блок-схема записывающей системы для записи различных состояний инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 45-46 - местные виды сбоку в срезе рукоятки инструмента, с изображением различных датчиков, в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 47 - изображение концевого эффектора инструмента, с изображением различных датчиков, в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 48 - изображение выстреливающей планки инструмента, содержащей датчик, в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 49 - вид сбоку рукоятки, концевого эффектора и выстреливающей планки инструмента, с изображением датчика, в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 50 - вид с пространственным разделением компонентов желоба для скобок и участков кассеты для скобок инструмента, с изображением различных датчиков, в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 51 - вид сверху желоба для скобок инструмента, с изображением различных датчиков, в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 52A и 52B - блок-хема последовательности операций способа работы с инструментом в соответствии с различными вариантами осуществления;
Фиг. 53 - таблица памяти, с изображением примерных записанных состояний инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 54 - блок-схема записывающей системы для записи различных состояний инструмента в соответствии с вариантами осуществления настоящего изобретения;
Фиг. 55 - схема, изображающая хирургический инструмент, связанный с удаленным компьютерным устройством; и
Фиг. 56 - блок-хема последовательности операций процесса в соответствии с различными вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг. 1 и 2 изображен хирургический режущий и скрепляющий инструмент 10 в соответствии с различными вариантами осуществления настоящего изобретения. Изображенный вариант осуществления представляет собой эндоскопический хирургический инструмент 10, и, в общем, описанные здесь варианты осуществления инструмента 10 являются эндоскопическими хирургическими режущими и скрепляющими инструментами. Следует отметить, однако, что, в соответствии с другими вариантами осуществления настоящего изобретения, инструмент 10 может быть неэндоскопическим хирургическим режущим и скрепляющим инструментом, например лапароскопическим инструментом.
Хирургический инструмент 10, изображенный на фиг. 1 и 2,содержит рукоятку 6, вал 8 и шарнирно-поворотный концевой эффектор 12, шарнирно соединенный с валом 8 в шарнире 14 сочленения. Вблизи рукоятки 6 может быть обеспечено устройство 16 управления шарнирным поворотом для осуществления поворота концевого эффектора 12 в шарнире 14 сочленения. Следует понимать, что различные варианты осуществления могут содержать неповоротный концевой эффектор,и поэтому могут быть без шарнира 14 сочленения или устройства 16 управления шарнирным поворотом. Кроме того, в показанном варианте осуществления концевой эффектор 12 выполнен с возможностью выполнения функции эндоскопического режущего инструмента для сжатия, разрезания и сшивания скобками ткани, хотя, в других вариантах осуществления можно применять концевые эффекторы других типов, например, концевые эффекторы для хирургических устройств других типов, например, захваты, режущие приспособления, сшивающие аппараты, приспособления для наложения скрепок, устройства доступа, устройства для доставки лекарства генной терапии к месту действия, ультразвуковые, RF (высокочастотные) или лазерные устройства и т.п.
Рукоятка 6 инструмента 10 может содержать смыкающий спусковой механизм 18 и выстреливающий спусковой механизм 20 для приведения в действие концевого эффектора 12. Специалистам будет очевидно, что инструменты, содержащие концевые эффекторы, предназначенные для разных хирургических целей, могут содержать разные количества или типы спусковых механизмов или других подходящих элементов управления для манипулирования концевым эффектором 12. Концевой эффектор 12 показан отделенным от рукоятки 6 предпочтительно удлиненным валом 8. В одном варианте осуществления врач или хирург, оперирующий инструментом 10, может шарнирно поворачивать концевой эффектор 12 относительно вала 8 с помощью устройства 16 управления шарнирным поворотом, как более подробно описано в находящейся на рассмотрении заявке на патент США № 11/329,020, поданной 10 января 2006 г., «Surgical Instrument Having An Articulating End Effector», изобретателей Geoffrey C. Hueil et al., которая целиком включена в настоящую заявку посредством ссылки.
В настоящем примере концевой эффектор 12 содержит, помимо прочего, желоб 22 для скобок и зажимной элемент с поворотно-поступательным перемещением, например упор 24, которые удерживаются на некотором разделяюще их расстоянии, которое обеспечивает эффективное сшивание скобками и разрезание ткани, зажатой в концевом эффекторе 12. Рукоятка 6 содержит ручку 26 пистолетного типа, к которой смыкающий спусковой механизм 18 вжимается поворотным движением врачом для осуществления зажима или примыкания упора 24 к желобу 22 для скобок концевого эффектора 12, чтобы, тем самым, зажать ткань, расположенную между упором 24 и желобом 22. Выстреливающий спусковой механизм 20 находится дальше снаружи от смыкающего спускового механизма 18. После того, как смыкающий спусковой механизм 18 зафиксируется в положении смыкания, как дополнительно поясняется ниже, выстреливающий спусковой механизм 20 может слегка повернуться к ручке 26 пистолетного типа настолько, что его сможет достать оперирующий хирург, работающий одной рукой. Затем оперирующий хирург может вжимать поворотным движением выстреливающий спусковой механизм 20 в ручку 26 пистолетного типа для осуществления сшивания скобками и разрезания ткани, зажатой в концевом эффекторе 12. В других вариантах осуществления возможно применение зажимных элементов других типов, кроме упора 24, например, противостоящего зажима и т.п.
Далее следует понимать, что термины «проксимальный» и «дистальный» применяются в настоящем описании для обозначения положения относительно захвата врачом рукоятки 6 инструмента 10. Следовательно, концевой эффектор 12 является дистальным относительно более проксимальной рукоятки 6. Дополнительно следует понимать, что, для удобства и ясности, термины, обозначающие пространственное положение, например, «вертикальный» и «горизонтальный», используются в настоящем описании применительно к чертежам. Однако существует множество пространственно-угловых положений применения хирургических инструментов, и упомянутые термины не предполагают ограничительного и абсолютного значения.
Смыкающий спусковой механизм 18 может быть приведен в действие первым. После того, как врач удостоверится в удовлетворительном положении концевого эффектора 12, врач может отжать смыкающий спусковой механизм 18 в его фиксируемое положение полного примыкания в непосредственной близости от ручки 26 пистолетного типа. Затем можно приводить в действие выстреливающий спусковой механизм 20. Выстреливающий спусковой механизм 20 возвращается в разжатое положение (см. фиг. 1 и 2), когда врач прекращает нажатие, как более полно описано ниже. Деблокирующая кнопка на рукоятке 6, при нажатии, может отпустить зафиксированный смыкающий спусковой механизм 18. Деблокирующая кнопка может иметь разные формы исполнения, например в виде деблокирующей кнопки 30, показанной на фиг. 42-43, сдвижной деблокирующей кнопки 160, показанной на фиг. 14, и/или кнопки 172, показанной на фиг. 16.
На фиг. 3-6 представлены варианты осуществления концевого эффектора 12 с вращательным приводом и вала 8 в соответствии с различными вариантами осуществления. На фиг. 3 представлен вид с пространственным разделением деталей концевого эффектора 12 в соответствии с различными вариантами осуществления. Как показано в представленном варианте осуществления, концевой эффектор 12 может содержать, в дополнение к вышеупомянутым желобу 22 и упору 24, режущий инструмент 32, скользящий блок 33, кассету 34 для скобок, которая вмещена с возможностью извлечения в желоб 22, и винтовой шпиндель 36. Режущий инструмент 32 может быть, например, ножом. Упор 24 можно размыкать и смыкать поворотом на оси 25 поворота, соединенной с проксимальным концом желоба 22. Упор 24 может также содержать лапку 27 на своем проксимальном конце, которая вставлена в компонент механической смыкающей системы (дополнительно описанной ниже) для размыкания и смыкания упора 24. Когда смыкающий спусковой механизм 18 приводится в действие, то есть вжимается пользователем инструмента 10, упор 24 может поворачиваться вокруг оси 25 поворота в сжатое или сомкнутое положение. Если зажим концевым эффектором 12 является удовлетворительным, то оперирующий хирург может привести в действие выстреливающий спусковой механизм 20, который, как более подробно поясняется ниже, приводит нож 32 и скользящий блок 33 в продольное движение по желобу 22, с разрезанием, тем самым, ткани, зажатой внутри концевого эффектора 12. Перемещение скользящего блока 33 по желобу 22 вызывает выталкивание скобок (не показанных) из кассеты 34 для скобок сквозь разрезанную ткань и в упор с сомкнутым упором 24, который загибает скобки для скрепления разрезанной ткани. В различных вариантах осуществления скользящий блок 33 может быть неразъемным компонентом кассеты 34. В патенте США № 6978921, «SURGICAL STAPLING INSTRUMENT INCORPORATING AN E-BEAM FIRING MECHANISM», Шелтона IV с соавторами (Shelton IV et al.), который целиком включен в настоящую заявку посредством ссылки, приведены дополнительные сведения, касающиеся упомянутых двухходовых режущих и скрепляющих инструментов. Скользящий блок 33 может быть такой составной частью кассеты 34, что, когда нож 32 отводится после операции разрезания, скользящий блок 33 не отводится.
Следует отметить, что, хотя в вариантах осуществления описанного здесь инструмента 10 применяется концевой эффектор 12, который сшивает скобками разрезанную ткань, в других вариантах осуществления возможно применение отличающихся методов скрепления или уплотнения разрезанной ткани. Например, можно также применять концевые эффекторы, которые используют RF-энергию или клея для скрепления разрезанной ткани. В патенте США № 5709680, «ELECTROSURGICAL HEMOSTATIC DEVICE», изобретателей Йейтса с соавторами (Yates et al.), и патенте США № 5688270, «ELECTROSURGICAL HEMOSTATIC DEVICE WITH RECESSED AND/OR OFFSET ELECTRODES», изобретателей Йейтса с соавторами (Yates et al.), которые целиком включены в настоящую заявку посредством ссылки, предлагается эндоскопический режущий инструмент, который использует RF-энергию для скрепления разрезанной ткани. В заявке на патент США № 11/267,811 изобретателей Джерома Р. Моргана с соавторами (Jerome R. Morgan et al.) и заявке на патент США № 11/267,383 изобретателей Фредерика Е. Шелтона с соавторами (Frederick E. Shelton IV, et al.), которые также целиком включены в настоящую заявку посредством ссылки, предлагаются режущие инструменты, в которых применяются клея для скрепления разрезанной ткани. Соответственно, хотя настоящее описание относится к операциям разрезания/сшивания скобками и подобным нижеследующим, следует понимать, что настоящий вариант осуществления является примерным и не предполагает ограничения. Возможно также использование других методов крепления тканей.
На фиг. 4 и 5 представлены виды с пространственным разделением деталей и на фиг. 6 представлен вид сбоку концевого эффектора 12 и вала 8 в соответствии с различными вариантами осуществления. Как показано в представленных вариантах осуществления, вал 8 может содержать проксимальную смыкающую трубку 40 и дистальную смыкающую трубку 42, соединенные между собой с возможностью поворота поворотно-соединительными звеньями 44. Дистальная смыкающая трубка 42 содержит отверстие 45, в которое вставлена лапка 27 на упоре 24, для размыкания и смыкания упора 24, как дополнительно поясняется ниже. Внутри смыкающих трубок 40, 42 может располагаться проксимальная несущая трубка 46. Внутри проксимальной несущей трубки 46 может располагаться главный поворотный (или проксимальный) приводной вал 48, который взаимодействует с вспомогательным (или дистальным) приводным валом 50 через коническую зубчатую передачу 52. Вспомогательный приводной вал 50 соединен с ведущим зубчатым колесом 54, которое находится в зацеплении с проксимальным ведущим зубчатым колесом 56 винтового вала 36. Вертикальная коническая шестерня 52b может находиться и поворачиваться в отверстии 57 в дистальном конце проксимальной несущей трубки 46. Дистальная несущая трубка 58 может служить для вмещения вспомогательного приводного вала 50 и ведущих зубчатых колес 54, 56. Главный приводной вал 48, вспомогательный приводной вал 50 и шарнирно-поворотный узел (например, коническая зубчатая передача 52a-c) иногда в настоящем описании совместно именуются «узлом главного приводного вала».
Подшипник 38, расположенный на дистальном конце желоба 22 для скобок, вмещает приводной винт 36 и, тем самым, обеспечивает возможность свободного вращения приводного винта 36 относительно желоба 22. Винтовой вал 36 может сопрягаться с резьбовым отверстием (не показанным) ножа 32 таким образом, что вращение вала 36 вызывает поступательное перемещение ножа 32 в дистальном или проксимальном направлении (в зависимости от направления вращения) по желобу 22 для скобок. Соответственно, когда главный приводной вал 48 приводится во вращение приведением в действие выстреливающего спускового механизма 20 (как подробнее изложено ниже), коническая зубчатая передача 52a-c вынуждает вращаться вспомогательный приводной вал 50, который, в свою очередь, благодаря зацеплению ведущих зубчатых колес 54, 56, приводит во вращение винтовой вал 36, что вызывает продольное перемещение ведущего элемента 32 ножа по желобу 22 и, тем самым, разрезание любой ткани, зажатой внутри концевого эффектора. Скользящий блок 33 может быть выполнен, например, из пластика, и может иметь скошенную дистальную поверхность. По мере того, как скользящий блок 33 движется по желобу 22, скошенная передняя поверхность может вжимать вверх или выталкивать скобки из кассеты для скобок сквозь зажатую ткань и в упор с упором 24. Упор 24 загибает скобки и, тем самым, сшивает скобками разрезанную ткань. Когда нож 32 отводится, нож 32 и скользящий блок 33 могут расцепляться, при этом скользящий блок 33 остается на дистальном конце желоба 22.
Как указано выше, вследствие отсутствия у пользователя обратной связи при операции разрезания/сшивания скобками, эндоскопические режущие инструменты с приводом от электродвигателя, в которых операция разрезания/сшивания скобками приводится в действие простым нажатием кнопки, не получили всеобщего признания врачами. Напротив, в вариантах осуществления настоящего изобретения эндоскопический режущий инструмент с приводом от электродвигателя обеспечивает пользователя обратной связью по срабатыванию, усилию и/или положению режущего инструмента 32 в концевом эффекторе 12.
На фиг. 7-10 представлен примерный вариант осуществления эндоскопического режущего инструмента с приводом от электродвигателя и, в частности, его рукоятки, в котором для пользователя обеспечена обратная связь по срабатыванию и усилию нагрузки режущего инструмента 32 в концевом эффекторе 12. Кроме того, данный вариант осуществления может использовать мощность, развиваемую пользователем при отводе выстреливающего спускового механизма 20, для подачи мощности в устройство (в, так называемом, режиме с усилением). Данный вариант осуществления можно применять с вышеописанными вариантами осуществления концевого эффектора 12 с вращательным приводом и вала 8. Как показано в представленном варианте осуществления, рукоятка 6 содержит внешние нижние боковины 59, 60 и внешние верхние боковины 61, 62, которые вместе образуют, в общем, внешнюю часть рукоятки 6. Батарея 64, например, ионная литиевая батарея, может быть установлена в участок 26 ручки пистолетного типа рукоятки 6. Батарея 64 питает электродвигатель 65, расположенный внутри верхнего участка, относящегося к участку 26 ручки пистолетного типа рукоятки 6. В соответствии с разными вариантами осуществления, электродвигатель 65 может быть приводным щеточным электродвигателем постоянного тока с максимальной частотой вращения приблизительно 25000 об/мин. Применимы также электродвигатели других подходящих типов. Электродвигатель 65 может приводить в движение 90° узел 66 конической шестерни, содержащий первую коническую шестерню 68 и вторую коническую шестерню 70. Узел 66 конической шестерни может приводить в движение узел 72 планетарной шестерни. Узел 72 планетарной шестерни может содержать ведущую шестерню 74, соединенную с приводным валом 76. Ведущая шестерня 74 может приводить в движение сопряженную венцовую шестерню 78, которая приводит в движение барабан 80 косозубой шестерни посредством приводного вала 82. Кольцо 84 может быть посажено на резьбе на барабан 80 косозубой шестерни. Следовательно, когда электродвигатель 65 вращается, кольцо 84 перемещается по барабану 80 косозубой шестерни посредством промежуточного узла 66 конической шестерни, узла 72 планетарной шестерни и венцовой шестерни 78.
Рукоятка 6 может также содержать датчик 110 работы электродвигателя (см. фиг. 10), связанный с выстреливающим спусковым механизмом 20, для обнаружения, когда выстреливающий спусковой механизм 20 вжат (или «примкнут») в участок 26 ручки пистолетного типа рукоятки 6 оперирующим хирургом, чтобы, тем самым, запускать исполнение операции разрезания/сшивания скобками концевым эффектором 12. Датчик 110 может быть пропорциональным датчиком, например, реостатом или переменным резистором. Когда выстреливающий спусковой механизм 20 вжимают, датчик 110 обнаруживает перемещение и передает электрический сигнал, указывающий напряжение (или мощность) для подачи на электродвигатель 65. Когда датчик 110 является переменным резистором или чем-то подобным, частота вращения электродвигателя 65 может быть, в общем, пропорциональна величине перемещения выстреливающего спускового механизма 20. То есть, если оперирующий хирург лишь слегка вжимает или смыкает выстреливающий спусковой механизм 20, то частота вращения электродвигателя 65 является относительно низкой. Когда выстреливающий спусковой механизм 20 полностью вжат (или находится в полностью сомкнутом положении), частота вращения электродвигателя 65 является максимальной. Другими словами, чем сильнее пользователь вжимает выстреливающий спусковой механизм 20, тем более высокое напряжение подается на электродвигатель 65, что обуславливает более высокие частоты вращения.
Рукоятка 6 может содержать среднюю деталь 104 рукоятки, прилегающую к верхнему участку выстреливающего спускового механизма 20. Рукоятка 6 может также содержать оттягивающую пружину 112, закрепленную между штырьками на средней детали 104 рукоятки и выстреливающим спусковым механизмом 20. Оттягивающая пружина 112 может оттягивать выстреливающий спусковой механизм 20 к его полностью разомкнутому положению. При этом, когда оперирующий хирург отпустит выстреливающий спусковой механизм 20, оттягивающая пружина 112 оттянет выстреливающий спусковой механизм 20 в его разомкнутое положение, что прекращает воздействие на датчик 110, и, тем самым, останавливает вращение электродвигателя 65. Более того, благодаря оттягивающей пружине 112, каждый раз, когда пользователь смыкает выстреливающий спусковой механизм 20, пользователь будет ощущать сопротивление операции смыкания, что обеспечивает для пользователя обратную связь по величине частоты вращения, развиваемой электродвигателем 65. Кроме того, оперирующий хирург может прекратить отвод выстреливающего спускового механизма 20 для снятия, тем самым, усилия с датчика 110, чтобы, тем самым, остановить электродвигатель 65. По сути, пользователь может остановить срабатывание концевого эффектора 12 и тем предоставить оперирующему хирургу некоторую возможность управления операцией разрезания/скрепления.
Дистальный конец барабана 80 косозубой шестерни содержит дистальный приводной вал 120, который приводит в движение венцовую шестерню 122, которая сопрягается с ведущей шестерней 124. Ведущая шестерня 124 соединена с главным приводным валом 48 узла главного приводного вала. При этом вращение электродвигателя 65 вызывает вращение узла главного приводного вала, что приводит в действие концевой эффектор 12 вышеописанным способом.
Кольцо 84, посаженное на резьбе на барабан 80 косозубой шестерни, может содержать штырь 86, который расположен внутри прорези 88 в кулисе 90. Кулиса 90 содержит отверстие 92 на противоположном конце 94, которое вмещает шарнирный палец 96, который присоединен между внешними боковинами 59, 60 рукоятки. Шарнирный палец 96 расположен также с проходом через отверстие 100 в выстреливающем спусковом механизме 20 и отверстие 102 в средней детали 104 рукоятки.
Кроме того, рукоятка 6 может содержать датчик 130 реверса электродвигателя (или конца хода) и датчик 142 останова электродвигателя (или начала хода). В разных вариантах осуществления датчик 130 реверса электродвигателя может быть концевым выключателем, расположенным на дистальном конце барабана 80 косозубой шестерни, так что кольцо 84, установленное на резьбе на барабане 80 косозубой шестерни, входит в контакт с датчиком 130 реверса электродвигателя и включает его, когда кольцо 84 достигает дистального конца барабана 80 косозубой шестерни. Датчик 130 реверса электродвигателя, при включении, посылает в электродвигатель 65 сигнал на реверсирование направления его вращения и, тем самым, на отведение ножа 32 концевого эффектора 12 по окончании операции разрезания.
Датчик 142 останова электродвигателя может быть, например, нормально замкнутым концевым выключателем. В разных вариантах осуществления упомянутый датчик может располагаться на проксимальном конце барабана 80 косозубой шестерни, чтобы кольцо 84 размыкало выключатель 142, когда кольцо 84 достигнет проксимального конца барабана 80 косозубой шестерни.
Во время работы, когда хирург, оперирующий инструментом 10, оттягивает выстреливающий спусковой механизм 20, датчик 110 обнаруживает ввод в действие выстреливающего спускового механизма 20 и посылает сигнал в электродвигатель 65 для включения правого вращения электродвигателя 65 с частотой, например, пропорциональной тому, насколько сильно оперирующий хирург оттягивает выстреливающий спусковой механизм 20. Правое вращение электродвигателя 65, в свою очередь, обуславливает вращение венцовой шестерни 78 на дистальном конце узла планетарной шестерни 72 и, тем самым, приводит к вращению барабана 80 косозубой шестерни, что вызывает движение кольца 84, установленного на резьбе на барабане 80 косозубой шестерни, в дистальном направлении по барабану 80 косозубой шестерни. Вращение барабана 80 косозубой шестерни приводит во вращение также вышеописанный узел главного приводного вала, что, в свою очередь, вызывает срабатывание ножа 32 в концевом эффекторе 12. То есть нож 32 и скользящий блок 33 приводятся в продольное движение по желобу 22, с разрезанием, тем самым, ткани, зажатой в концевом эффекторе 12. Кроме того, в вариантах осуществления, в которых в которых применяется сшивающий скобками концевой эффектор, вызывается исполнение операции сшивания скобками концевым эффектором 12.
К моменту, когда операция разрезания/сшивания скобками концевым эффектором 12 будет закончена, кольцо 84 на барабане 80 косозубой шестерни достигнет дистального конца барабана 80 косозубой шестерни и, тем самым, вызовет включение датчика 130 реверса электродвигателя, который посылает сигнал в электродвигатель 65 для осуществления реверсирования вращения электродвигателя 65. Это, в свою очередь, вызывает отведение ножа 32, а также приводит кольцо 84 на барабане 80 косозубой шестерни в обратное движение к проксимальному концу барабана 80 косозубой шестерни.
Средняя деталь 104 рукоятки содержит задний буртик 106, который входит в зацепление с кулисой 90, как лучше всего показано на фиг. 8 и 9. Средняя деталь 104 рукоятки содержит также упор 107 поступательного движения, который входит в зацепление с выстреливающим спусковым механизмом 20. Перемещение кулисы 90 регулируется, как поясняется выше, вращением электродвигателя 65. Когда кулиса 90 поворачивается против часовой стрелки в то время, как кольцо 84 движется от проксимального конца барабана 80 косозубой шестерни к дистальному концу, средняя деталь 104 рукоятки будет иметь свободу поворота против часовой стрелки. Следовательно, по мере того, как пользователь будет вжимать выстреливающий спусковой механизм 20, выстреливающий спусковой механизм 20 будет входить в зацепление с упором 107 поступательного движения средней детали 104 рукоятки и, тем самым, вынуждать среднюю деталь 104 рукоятки вращаться против часовой стрелки. Однако, вследствие зацепления заднего буртика 106 с кулисой 90, средняя деталь 104 рукоятки сможет поворачиваться против часовой стрелки лишь настолько, насколько допускает кулиса 90. При этом, если электродвигатель 65 должен перестать вращаться по какой-либо причине, то кулиса 90 перестанет поворачиваться, и пользователь не сможет дальше вжимать выстреливающий спусковой механизм 20, так как средняя деталь 104 рукоятки не будет свободно поворачиваться против часовой стрелки из-за кулисы 90.
На фиг. 10A и 10B показаны два состояния датчика переменной величины, который можно использовать в качестве датчика 110 работы электродвигателя в соответствии с различными вариантами осуществления настоящего изобретения. Датчик 110 может содержать лобовой участок 280, первый электрод (A) 282, второй электрод (B) 284 и сжимаемый диэлектрический материал 286 (например, EAP (электроактивный полимер)) между электродами 282, 284. Датчик 110 может быть расположен так, что лобовой участок 280 контактирует с выстреливающим спусковым механизмом 20, при его отводе. Соответственно, когда выстреливающий спусковой механизм 20 отводят назад, диэлектрический материал 286 сжимается, как показано на фиг. 10B, так что электроды 282, 284 сближаются. Поскольку расстояние «b» между электродами 282, 284 непосредственно связано с полным сопротивлением между электродами 282, 284, то, чем больше расстояние, тем больше полное сопротивление, и чем короче расстояние, тем меньше полное сопротивление. При этом величина усилия сжатия диэлектрика 286 (обозначенного как усилие «F» на фиг. 10B), вызванного отводом выстреливающего спускового механизма 20, пропорционально полному сопротивлению между электродами 282, 284, которое можно использовать для пропорционального управления электродвигателем 65.
Компоненты примерной смыкающей системы для смыкания (или сжатия) упора 24 концевого эффектора 12 посредством отвода смыкающего спускового механизма 18 также показаны на фиг. 7-10. В представленном варианте осуществления смыкающая система содержит вилку 250, соединенную со смыкающим спусковым механизмом 18 с помощью шарнирного пальца 251, который вставлен сквозь совмещенные отверстия как в смыкающем спусковом механизме 18, так и в вилке 250. Шарнирный палец 252, на котором поворачивается смыкающий спусковой механизм 18, вставлен сквозь другое отверстие в смыкающем спусковом механизме 18, которое смещено от места, где палец 251 вставлен сквозь смыкающий спусковой механизм 18. Следовательно, отвод смыкающего спускового механизма 18 вынуждает верхнюю часть смыкающего спускового механизма 18, к которой вилка 250 прикреплена пальцем 251, поворачиваться против часовой стрелки. Дистальный конец вилки 250 соединен пальцем 254 с первой смыкающей скобой 256. Первая смыкающая скоба 256 соединена со второй смыкающей скобой 258. Смыкающие скобы 256, 258 вместе образуют отверстие, в которое посажен и зафиксирован проксимальный конец проксимальной смыкающей трубки 40 (см. фиг. 4) таким образом, что продольное перемещение смыкающих скоб 256, 258 вызывает продольное перемещение проксимальной смыкающей трубки 40. Инструмент 10 содержит также смыкающий шток 260, находящийся внутри проксимальной смыкающей трубки 40. Смыкающий шток 260 может содержать проем 261, в который входит штырь 263 одной из внешних деталей рукоятки, например, внешней нижней боковины 59 в показанном варианте осуществления, чтобы жестко фиксировать смыкающий шток 260 с рукояткой 6. При этом проксимальная смыкающая трубка 40 может продольно перемещаться относительно смыкающего штока 260. Смыкающий шток 260 может также содержать дистальную манжету 267, которая входит в углубление 269 в проксимальной несущей трубке 46 и фиксируется в нем крышкой 271 (см. фиг. 4).
Когда, в процессе работы, вилка 250 поворачивается из-за отвода смыкающего спускового механизма 18, смыкающие скобы 256, 258 вынуждают проксимальную смыкающую трубку 40 перемещаться в дистальном направлении (т.е. от рукояточного конца инструмента 10), вследствие чего дистальная смыкающая трубка 42 принуждается к перемещению в дистальном направлении, что, в свою очередь, вызывает поворот упора 24 вокруг шарнирных пальцев 25 в зажатое или сомкнутое положение. Когда смыкающий спусковой механизм 18 деблокируется из положения фиксации, проксимальная смыкающая трубка 40 принуждается к сдвигу в проксимальном направлении, что приводит к сдвигу дистальной смыкающей трубки 42 в проксимальном направлении, и данный сдвиг, в свою очередь, из-за лапки 27, вставленной в проем 45 дистальной смыкающей трубки 42, вызывает поворот упора 24 вокруг шарнирных пальцев 25 в разомкнутое или несжатое положение. Таким образом, путем отвода и фиксации смыкающего спускового механизма 18, оперирующий хирург может зажать ткань между упором 24 и желобом 22, и может разжать ткань после операции разрезания/сшивания скобками путем деблокирования смыкающего спускового механизма 18 из положения фиксации.
На фиг. 11 представлена принципиальная схема электрической цепи инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения. Когда оперирующий хирург первоначально подтягивает выстреливающий спусковой механизм 20 после фиксации смыкающего спускового механизма 18, датчик 110 включается и допускает протекание через него тока. Если нормально разомкнутый сенсорный выключатель 130 реверса электродвигателя находится в разомкнутом состоянии (эо означает, что конец хода концевого эффектора еще не достигнут), ток будет протекать к однополюсному двухпозиционному реле 132. Поскольку сенсорный выключатель 130 реверса электродвигателя не замкнут, то катушка 134 индуктивности реле 132 не будет возбуждена, и поэтому реле 132 будет находиться в своем невозбужденном состоянии. Схема содержит также датчик 136 блокировки кассеты. Если концевой эффектор 12 содержит кассету 34 для скобок, то датчик 136 будет находиться в замкнутом состоянии и, тем самым, будет допускать протекание тока. В ином случае, если концевой эффектор 12 не содержит кассету 34 для скобок, то датчик 136 будет разомкнут и, тем самым, не будет допускать питания электродвигателя 65 от батареи 64.
Когда кассета 34 для скобок присутствует, датчик 136 замкнут, и тогда однополюсное однопозиционное реле 138 получает питание. Когда реле 138 получает питание, ток протекает через реле 138, через датчик 110 на переменном резисторе и, через двухполюсное двухпозиционное реле 140, в электродвигатель 65, и, тем самым, питает электродвигатель 65 и обеспечивает его право направленное вращение.
Когда концевой эффектор 12 достигнет конца своего хода, датчик 130 реверса электродвигателя сработает и, тем самым, замкнет переключатель 130 и подаст питание на реле 134. В результате этого, реле 134 переключается в его возбужденное состояние (не показанное на фиг. 13), что приводит к протеканию тока в обход датчика 136 блокировки кассеты и переменного сопротивления 110 и, вместо этого, вынуждает ток протекать как через нормально замкнутое двухполюсное двухпозиционное реле 140, так и обратно к электродвигателю 65, но таким образом через реле 140, в результате чего вызывается реверс направления вращения электродвигателя 65.
Поскольку сенсорный выключатель 142 останова электродвигателя является нормально замкнутым, ток будет протекать обратно в реле 134 и, тем самым, удерживать его в замкнутом состоянии, пока выключатель 142 не разомкнется. Когда нож 32 полностью отводится, сенсорный выключатель 142 останова электродвигателя срабатывает и при этом вызывает размыкание выключателя 142, с выключением, тем самым, питания электродвигателя 65.
В других вариантах осуществления вместо пропорционального датчика 110 можно применить двухпозиционный датчик. В таких вариантах осуществления частота вращения электродвигателя 65 не будет пропорциональной усилию, прилагаемому оперирующим хирургом. Вместо этого электродвигатель 65 будет вращаться, как правило, с постоянной частотой. Но оперирующий хирург будет продолжать ощущать обратную связь по усилию, так как выстреливающий спусковой механизм 20 включен в цепь зубчатых передач привода.
На фиг. 12 представлен вид сбоку рукоятки 6 механизированного эндоскопического режущего инструмента с усилением в соответствии с другим вариантом осуществления. Вариант осуществления на фиг. 12 аналогичен варианту осуществления на фиг. 7-10, за исключением того, что в варианте осуществления на фиг. 12 отсутствует кулиса, соединенная с кольцом 84, установленным на резьбе на барабан 80 косозубой шестерни. Вместо этого, в варианте осуществления на фиг. 12 кольцо 84 содержит сенсорный участок 114, который перемещается с кольцом 84 по мере того, как кольцо 84 продвигается вперед (и обратно) на барабане 80 косозубой шестерни. Сенсорный участок 114 содержит вырез 116. Датчик 130 реверса электродвигателя может находиться на дистальном конце выреза 116, и датчик 142 останова электродвигателя может находиться на проксимальном конце выреза 116. По мере того, как кольцо 84 перемещается вперед (и обратно) на барабане 80 косозубой шестерни, сенсорный участок 114 перемещается вместе с ним. Кроме того, как показано на фиг. 12, средняя деталь 104 может иметь кулису 118, которая продолжается в вырез 116.
Во время работы, когда хирург, работающий инструментом 10, отводит выстреливающий спусковой механизм 20 назад к ручке 26 пистолетного типа, датчик 110 работы электродвигателя обнаруживает движение и посылает сигнал включения питания электродвигателя 65, который, помимо прочего, приводит во вращение барабан 80 косозубой шестерни. В то время, когда барабан 80 косозубой шестерни вращается, кольцо 84, установленное на резьбе на барабане 80 косозубой шестерни, продвигается вперед (или отводится назад, в зависимости от направления вращения). Кроме того, вследствие притягивания выстреливающего спускового механизма 20 , средняя деталь 104 принуждается к повороту против часовой стрелки вместе с выстреливающим спусковым механизмом 20 благодаря упору 107 поступательного движения, который находится в зацеплении с выстреливающим спусковым механизмом 20. Поворот средней детали 104 против часовой стрелки вынуждает кулису 118 поворачиваться против часовой стрелки вместе с сенсорным участком 114 кольца 84 таким образом, что кулиса 118 остается расположенной в вырезе 116. Когда кольцо 84 достигает дистального конца барабана 80 косозубой шестерни, кулиса 118 войдет в контакт с датчиком 130 реверса электродвигателя и, тем самым, вызовет срабатывание этого датчика. Аналогично, когда кольцо 84 достигает проксимального конца барабана 80 косозубой шестерни, кулиса войдет в контакт с датчиком 142 останова электродвигателя и, тем самым, вызовет срабатывание этого датчика. Описанные действия могут, соответственно, реверсировать и останавливать электродвигатель 65, как изложено выше.
На фиг. 13 представлен вид сбоку рукоятки 6 механизированного эндоскопического режущего инструмента с усилением в соответствии с другим вариантом осуществления. Вариант осуществления на фиг. 13 аналогичен варианту осуществления на фиг. 7-10, за исключением того, что в варианте осуществления на фиг. 13 отсутствует прорезь в кулисе 90. Вместо этого, кольцо 84, установленное на резьбе на барабане 80 косозубой шестерни, содержит вертикальный желоб 126. Вместо прорези, кулиса 90 содержит штырь 128, который расположен в желобе 126. Когда барабан 80 косозубой шестерни вращается, кольцо 84, посаженное на резьбе на барабан 80 косозубой шестерни, продвигается вперед (или отводится назад, в зависимости от направления вращения). Кулиса 90 поворачивается против часовой стрелки по мере того, как кольцо 84 продвигается вперед, благодаря штырю 128, расположенному в желобе 126, как показано на фиг. 13.
Как упоминалось выше, при применении двухходового механизированного инструмента, оперирующий хирург сначала подтягивает назад и фиксирует смыкающий спусковой механизм 18. На фиг. 14 и 15 представлен один вариант осуществления метода фиксации смыкающего спускового механизма 18 к участку 26 ручки пистолетного типа рукоятки 6. В изображенном варианте осуществления участок 26 ручки пистолетного типа содержит зацеп 150, который поджат в поворот против часовой стрелки на оси 151 поворота торсионной пружиной 152. Кроме того, смыкающий спусковой механизм 18 содержит смыкающую планку 154. По мере того, как оперирующий хирург подтягивает смыкающий спусковой механизм 18, смыкающая планка 154 входит в контакт со скошенным участком 156 зацепа 150 и, тем самым, поворачивает зацеп 150 вверх (или по часовой стрелке на фиг. 14-15), пока смыкающая планка 154 не пройдет полностью скошенный участок 156 и не войдет в углубленный вырез 158 зацепа 150, который фиксирует смыкающий спусковой механизм 18 в данном положении. Оперирующий хирург может деблокировать смыкающий спусковой механизм 18 нажимом вниз на сдвижную деблокирующую кнопку 160 на задней или противоположной стороне участка 26 ручки пистолетного типа. Нажим вниз на сдвижную деблокирующую кнопку 160 поворачивает зацеп 150 по часовой стрелке так, что смыкающая планка 154 высвобождается из углубленного выреза 158.
На фиг. 16 изображен другой механизм фиксации смыкающего спускового механизма в соответствии с различными вариантами осуществления. В варианте осуществления на фиг. 16 смыкающий спусковой механизм 18 содержит клин 160, имеющий стреловидный участок 161. Стреловидный участок 161 поджат вниз (или по часовой стрелке) плоской пружиной 162. Клин 160 и плоская пружина 162 могут быть выполнены из, например, литьевого пластика. Когда смыкающий спусковой механизм 18 отводят назад, стреловидный участок 161 вставляется через отверстие 164 в участке 26 ручки пистолетного типа рукоятки 6. Нижняя скошенная поверхность 166 стреловидного участка 161 входит в контакт с нижней боковой стенкой 168 отверстия 164, что заставляет стреловидный участок 161 поворачиваться против часовой стрелки. В конечном счете, нижняя скошенная поверхность 166 полностью проходит нижнюю боковую стенку 168, снимая усилие, действующее против часовой стрелки на стреловидный участок 161, что приводит к сдвигу нижней боковой стенки 168 в зафиксированное положение в вырезе 170 позади стреловидного участка 161.
Для деблокирования смыкающего спускового механизма 18 пользователь нажимает вниз на кнопку 172 на противоположной стороне смыкающего спускового механизма 18, что приводит к повороту стреловидного участка 161 против часовой стрелки и позволяет стреловидному участку 161 высвободиться из отверстия 164.
На фиг. 17-22 изображен механизм фиксации смыкающего спускового механизма в соответствии с другим вариантом осуществления. Как показано в данном варианте осуществления, смыкающий спусковой механизм 18 содержит гибкую продольную консоль 176, которая содержит боковой штифт 178, продолжающийся из нее. Консоль 176 и штифт 178 можно выполнить, например, из литьевого пластика. Участок 26 ручки пистолетного типа рукоятки 6 содержит отверстие 180 с поперечно продолжающимся клином 182, расположенным в нем. Когда смыкающий спусковой механизм 18 отводят назад, штифт 178 входит в контакт с клином 182, и штифт 178 прижимается вниз (т.е. консоль 176 поворачивается по часовой стрелке) нижней поверхностью 184 клина 182, как показано на фиг. 17 и 18. Когда штифт 178 полностью проходит нижнюю поверхность 184, усилие, действующее по часовой стрелке на консоль 176, снимается, и штифт 178 поворачивается против часовой стрелки так, что штифт 178 приходит в неподвижное состояние в вырез 186 за клином 182, как показано на фиг. 19, и, тем самым, фиксирует смыкающий спусковой механизм 18. Штифт 178 дополнительно удерживается в заданном месте в фиксированном положении гибким упором 188, продолжающимся из клина 184.
Для деблокировки смыкающего спускового механизма 18 оперирующий хирург может дальше сжимать смыкающий спусковой механизм 18, чем привести штифт 178 в контакт с наклонной задней стенкой 190 отверстия 180, вследствие чего штифт 178 выдавливается вверх мимо гибкого упора 188, как показано на фиг. 20 и 21. Тогда штифт 178 высвобождается для выхода через верхни желоб 192 из отверстия 180 таким образом, что смыкающий спусковой механизм 18 больше не фиксируется к участку 26 ручки пистолетного типа, как показано на фиг. 22.
На фиг. 23A-B изображен универсальный шарнир («u-шарнир»)195. Вторая деталь 195-2 u-шарнира 195 поворачивается в горизонтальной плоскости, в которой расположена первая деталь 195-1. На фиг. 23A показан u-шарнир 195 с линейной (180°) угловой ориентацией, и на фиг. 23B показан u-шарнир 195 с ориентацией под углом около 150°. U-шарнир 195 можно применить вместо конических шестерен 52a-c (см., например, фиг. 4) в точке 14 сочленения узла главного приводного вала для шарнирного поворота концевого эффектора 12. На фиг. 24A-B показан торсионный трос 197, который можно применить вместо как конических шестерен 52a-c, так и u-шарнира 195 для осуществления шарнирного поворота концевого эффектора 12.
На фиг. 25-31 представлен другой вариант осуществления механизированного двухходового хирургического режущего и скрепляющего инструмента 10 с усилением в соответствии с другим вариантом осуществления настоящего изобретения. Вариант осуществления, показанный на фиг. 25-31, аналогичен варианту осуществления, показанному на фиг. 6-10, за исключением того, что вместо барабана 80 косозубой шестерни, вариант осуществления, показанный на фиг. 23-28, содержит альтернативный шестеренный приводной узел. Вариант осуществления, показанный на фиг. 25-31, содержит редукторный узел 200, содержащий несколько шестерен, расположенных в корпусной раме 201, где шестерни включены между планетарной шестерней 72 и ведущей шестерней 124 на проксимальном конце приводного вала 48. Как дополнительно поясняется ниже, редукторный узел 200 обеспечивает для пользователя, через выстреливающий спусковой механизм 20 , обратную связь по срабатыванию и усилию нагрузки концевого эффектора 12. Кроме того, пользователь может обеспечивать подачу мощности в систему через редукторный узел 200 для поддержки срабатывания концевого эффектора 12. В этом смысле, аналогично вышеописанным вариантам осуществления, вариант осуществления, показанный на фиг. 23-32, представляет собой другой механизированный инструмент 10 с усилением, который обеспечивает для пользователя обратную связь по усилию нагрузки, испытываемой инструментом.
В показанном варианте осуществления выстреливающий спусковой механизм 20 содержит две детали: основной корпусной участок 202 и участок 204 жесткости. Основной корпусной участок 202 может быть выполнен, например, из пластика, и участок 204 жесткости может быть выполнен из более жесткого материала, например металла. В показанном варианте осуществления участок 204 жесткости прилегает к основному корпусному участку 202, но, в соответствии с другими вариантами осуществления, участок 204 жесткости может быть внутри основного корпусного участка 202. Шарнирный палец 207 можно вставлять сквозь отверстия в деталях 202, 204 выстреливающего спусковой механизма и может быть точкой, вокруг которой поворачивают выстреливающий спусковой механизм 20. Кроме того, пружина 222 может оттягивать выстреливающий спусковой механизм 20 в направлении поворота против часовой стрелки. Пружина 222 может иметь дистальный конец, закрепленный к штифту 224, который подсоединен к деталям 202, 204 выстреливающего спускового механизма 20. Проксимальный конец пружины 222 может быть присоединен к одной из внешних нижних боковин 59, 60 рукоятки.
В показанном варианте осуществления как основной корпусной участок 202, так и участок 204 жесткости содержат зубчатые участки 206, 208 (соответственно) на их верхних торцевых участках. Зубчатые участки 206, 208 находятся в зацеплении с шестерней в редукторном узле 200, как поясняется ниже, для приведения в движение узла главного приводного вала и для обеспечения для пользователя обратной связи по степени срабатывания концевого эффектора 12.
Редукторный узел 200 может содержать, как показано в представленном варианте осуществления, шесть (6) шестерен. Первая шестерня 210 редукторного узла 200 находитя в зацеплении с зубчатыми участками 206, 208 выстреливающего спускового механизма 20. Кроме того, первая шестерня 210 находится в зацеплении со второй шестерней 212 меньшего размера, при этом вторая шестерня 212 меньшего размера расположена соосно с третьей шестерней 214 большего размера. Третья шестерня 214 находится в зацеплении с четвертой шестерней 216 меньшего размера, при этом четвертая шестерня меньшего размера расположена соосно с пятой шестерней 218. Пятая шестерня 218 является 90° конической шестерней, которая находится в зацеплении с сопряженной 90° конической шестерней 220 (лучше всего показанной на фиг. 31), которая соединена с ведущей шестерней 124, которая приводит в движение главный приводной вал 48.
Во время работы, когда пользователь отводит назад выстреливающий спусковой механизм 20, датчик работы электродвигателя (не показанный) включается, что может обеспечить сигнал на вращение электродвигателя 65 с частотой вращения, пропорциональной расстоянию, на которое или величине усилия, с которым оперирующий хирург отводит назад выстреливающий спусковой механизм 20. Тем самым, электродвигатель 65 приводится во вращение с частотой, пропорциональной сигналу от датчика. Датчик для данного варианта осуществления не показан, но может быть сходным с вышеописанным датчиком 110 работы электродвигателя. Датчик можно расположить в рукоятке 6 таким образом, что датчик испытывает нажим, когда выстреливающий спусковой механизм 20 отводят назад. Кроме того, вместо пропорционального датчика можно применить двухпозиционный датчик.
Вращение электродвигателя 65 вызывает вращение конических шестерен 66, 70 и, тем самым, вызывает вращение планетарной шестерни 72, что приводит, через приводной вал 76, во вращение венцовую шестерню 122. Венцовая шестерня 122 находится в зацеплении с ведущей шестерней 124, которая соединена с главным приводным валом 48. Следовательно, вращение ведущей шестерни 124 приводит во вращение главный приводной вал 48, который приводит в исполнение операцию разрезания/сшивания скобками концевым эффектором 12.
Правое вращение ведущей шестерни 124, в свою очередь, вызывает вращение конической шестерни 220, что приводит, посредством остальных шестерен редукторного узла 200, во вращение первую шестерню 210. Первая шестерня 210 находится в зацеплении с зубчатыми участками 206, 208 выстреливающего спускового механизма 20 и, тем самым, вынуждает выстреливающий спусковой механизм 20 поворачиваться против часовой стрелки, когда электродвигатель 65 обеспечивает привод вперед в концевом эффекторе 12, (и поворачиваться по часовой стрелке, когда электродвигатель 65 вращается в реверсном направлении для отвода концевого эффектора 12). При этом пользователь воспринимает обратную связь по усилию нагрузки и срабатыванию концевого эффектора 12 при захвате пользователем выстреливающего спускового механизма 20. Следовательно, когда пользователь будет отводить назад выстреливающий спусковой механизм 20, он будет ощущать сопротивление, связанное с усилием нагрузки, действующим на концевой эффектор 12. Аналогично, когда оперирующий хирург отпускает выстреливающий спусковой механизм 20 после операции разрезания/прошивания скобками, чтобы он мог вернуться в его исходное положение, пользователь будет испытывать усилие поворота по часовой стрелке со стороны выстреливающего спускового механизма 20, которое, в общем, пропорционально частоте реверсного вращения электродвигателя 65.
Следует также отметить, что в данном варианте осуществления пользователь может прилагать усилие (либо вместо, либо в дополнение к усилию электродвигателя 65) для приведения в движение узла главного приводного вала (и, потому, для выполнения операции разрезания/сшивания скобками концевым эффектором 12) посредством отвода выстреливающего спускового механизма 20. То есть отвод выстреливающего спускового механизма 20 приводит зубчатые участки 206, 208 в поворот против часовой стрелки, что вызывает вращение шестерен редукторного узла 200 и, тем самым, вызывает вращение ведущей шестерни 124, которая приводит во вращение главный приводной вал 48.
Хотя на фиг. 25-31 не показано, инструмент 10 может дополнительно содержать датчики реверса электродвигателя и останова электродвигателя. Как пояснялось выше, датчики реверса электродвигателя и останова электродвигателя могут обнаруживать, соответственно, конец хода разрезания (полное срабатывание ножа 32) и конец операции отвода (полный отвод ножа 32). Для соответствующего питания электродвигателя 65 можно применить схему, аналогичную схеме, описанной ранее в связи с фиг. 11.
На фиг. 32-36 изображен двухходовой механизированный режущий и скрепляющий инструмент 10 с усилением в соответствии с другим вариантом осуществления. Вариант осуществления, изображенный на фиг. 32-36, аналогичен варианту, изображенному на фиг. 25-31, за исключением того, что в варианте осуществления на фиг. 32-36 выстреливающий спусковой механизм 20 содержит нижний участок 228 и верхний участок 230. Оба участка 228, 230 соединены с шарнирным пальцем 207, который расположен с проходом сквозь каждый участок 228, 230, и поворачиваются на данном шарнирном пальце. Верхний участок 230 содержит зубчатый участок 232, который находится в зацеплении с первой шестерней 210 редукторного узла 200. Пружина 222 присоединена к верхнему участку 230 так, что верхний участок оттягивается в поворот в направлении по часовой стрелке. Верхний участок 230 может также содержать нижнюю консоль 234, которая контактирует с верхней поверхностью нижнего участка 228 выстреливающего спускового механизма 20 таким образом, что, когда верхний участок 230 приводится в поворотное движение по часовой стрелке, нижний участок 228 поворачивается также по часовой стрелке, а когда нижний участок 228 поворачивается против часовой стрелки, верхний участок 230 поворачивается также против часовой стрелки. Аналогично, нижний участок 228 содержит поворотный упор 238, который находится в зацеплении с буртиком верхнего участка 230. При этом, когда верхний участок 230 приводится в поворотное движение против часовой стрелки, нижний участок 228 также поворачивается против часовой стрелки, а когда нижний участок 228 поворачивается по часовой стрелке, верхний участок 230 также поворачивается по часовой стрелке.
Изображенный вариант осуществления содержит также датчик 110 работы электродвигателя, который передает в электродвигатель 65 сигнал, который в разных вариантах осуществления может вызывать вращение электродвигателя 65 с частотой, пропорциональной усилию, прилагаемому оперирующим хирургом при отводе выстреливающего спускового механизма 20. Датчик 110 может представлять собой, например, реостат или какой-то другой датчик на переменном сопротивлении, как поясняется в настоящем описании. Кроме того, инструмент 10 может содержать датчик 130 реверса электродвигателя, который включается или переключается при контакте с ним передней поверхности 242 верхнего участка 230 выстреливающего спускового механизма 20. При приведении в действие датчик 130 реверса электродвигателя посылает в электродвигатель 65 сигнал на реверсирование направления. Инструмент 10 может также содержать датчик 142 останова электродвигателя, который срабатывает или приводится в действие при контактном воздействии на него нижнего участка 228 выстреливающего спускового механизма 20. При приведении в действие датчик 142 останова электродвигателя посылает сигнал на останов реверсивного вращения электродвигателя 65.
Во время работы, когда оперирующий хирург отводит назад смыкающий спусковой механизм 18 в фиксированное положение, выстреливающий спусковой механизм 20 немного отводится назад (механизмами, известными в данной области техники, в том числе из патента США № 6978921, выданного Фредерику Шелтону с соавторами (Frederick Shelton IV et al.), и патента США № 6905057, выданного Джеффри С.Свейзи с соавторами (Jeffery S. Swayze et al.), которые целиком включены в настоящую заявку посредством ссылки), чтобы пользователь смог ухватить выстреливающий спусковой механизм 20 для начала операции разрезания/сшивания скобками, как показано на фиг. 32 и 33. С этого момента, как показано на фиг. 33, зубчатый участок 232 верхнего участка 230 выстреливающего спускового механизма 20 перемещается в зацепление с первой шестерней 210 редукторного узла 200. Когда оперирующий хирург отводит назад выстреливающий спусковой механизм 20, в соответствии с разными вариантами осуществления выстреливающий спусковой механизм 20 может повернуться немного, например на пять градусов, до включения датчика 110 работы электродвигателя, как показано на фиг. 34. Срабатывание датчика 110 вызывает правое вращение электродвигателя 65 с частотой, пропорциональной усилию отвода, прилагаемому оперирующим хирургом. Правое вращение электродвигателя 65 приводит, как изложено выше, во вращение главный приводной вал 48, что вызывает срабатывание ножа 32 в концевом эффекторе 12 (т.е. начало хода по желобу 22). Вращение ведущей шестерни 124, которая соединена с главным приводным валом 48, приводит к вращению шестерен 210-220 в редукторном узле 200. Поскольку первая шестерня 210 находится в зацеплении с зубчатым участком 232 верхнего участка 230 выстреливающего спускового механизма 20, то верхний участок 232 приводится в поворотное движение против часовой стрелки, что вызывает также поворот нижнего участка 228 против часовой стрелки.
Когда нож 32 развернут полностью (т.е. находится в конце разрезного хода), передняя поверхность 242 верхнего участка 230 включает датчик 130 реверса электродвигателя, который посылает сигнал в электродвигатель 65 для реверсирования направления вращения. Это принуждает узел главного приводного вала реверсировать направление вращения для отвода назад ножа 32. Реверсирование вращения узла главного приводного вала приводит также к реверсированию направления вращения шестерен 210-220 в редукторном узле, что вызывает поворот по часовой стрелке верхнего участка 230 выстреливающего спускового механизма 20, что, в свою очередь, вынуждает нижний участок 228 выстреливающего спускового механизма 20 поворачиваться по часовой стрелке, пока нижний участок 228 не расцепляет или не вызывает срабатывание датчика 142 останова электродвигателя, когда нож 32 отведен полностью, что приводит к останову электродвигателя 65. При этом пользователь воспринимает обратную связь по срабатыванию концевого эффектора 12, при захвате пользователем выстреливающего спускового механизма 20. Следовательно, когда пользователь будет отводить назад выстреливающий спусковой механизм 20, он будет испытывать сопротивление, связанное со срабатыванием концевого эффектора 12 и, в частности, с усилием нагрузки, действующей на нож 32. Аналогично, когда оперирующий хирург отпускает выстреливающий спусковой механизм 20 после операции разрезания/сшивания скобками, чтобы данный спусковой механизм мог вернуться в его первоначальное положение, оперирующий хирург будет испытывать усилие, действующее в сторону поворота по часовой стрелке, со стороны выстреливающего спускового механизма 20, которое будет, в общем, пропорционально частоте реверсного вращения электродвигателя 65.
Следует также отметить, что в данном варианте осуществления пользователь может прилагать усилие (либо вместо, либо в дополнение к усилию электродвигателя 65) для приведения в движение узла главного приводного вала (и, следовательно, для выполнения операции разрезания/сшивания скобками концевым эффектором 12) при отводе выстреливающего спускового механизма 20. То есть отвод выстреливающего спускового механизма 20 приводит зубчатый участок 232 верхнего участка 230 в поворот против часовой стрелки, что вынуждает шестерни редукторного узла 200 вращаться и, тем самым, приводить во вращение ведущую шестерню 124, которая приводит во вращение узел главного приводного вала.
В вышеописанных вариантах осуществления применялись системы с усилением и обратной связью для пользователя, с применением или без адаптивного управления (например, с использованием датчиков 110, 130 и 142, не входящих в замкнутую систему электродвигателя 65, цепи зубчатых передач привода и концевого эффектора), для двухходового механизированного хирургического режущего и скрепляющего инструмента. То есть усилие, прилагаемое пользователем при отводе выстреливающего спускового механизма 20, может добавляться к усилию, оказываемому электродвигателем 65, благодаря включению выстреливающего спускового механизма 20 (прямо или косвенно) в цепь зубчатых передач привода между электродвигателем 65 и главным приводным валом 48. В других вариантах осуществления настоящего изобретения пользователь может быть снабжен тактильной обратной связью по положению ножа 32 в концевом эффекторе, но без включения выстреливающего спускового механизма 20 в цепь зубчатых передач привода. На фиг. 37-40 изображен механизированный хирургический режущий и скрепляющий инструмент с такого рода системой тактильной обратной связи по положению.
В вариантах осуществления, изображенных на фиг. 37-40, выстреливающий спусковой механизм 20 может иметь нижний участок 228 и верхний участок 230, аналогично инструменту 10, показанному на фиг. 32-36. Однако в отличие от варианта осуществления, показанного на фиг. 32-36, верхний участок 230 не содержит зубчатый участок, который сопрягается с частью цепи зубчатых передач привода. Вместо этого, инструмент содержит второй электродвигатель 265 с ввинченным в него резьбовым штоком 266. Резьбовой шток 266 возвратно-поступательно перемещается в продольном направлении внутрь и из электродвигателя 265, когда электродвигатель 265 вращается, в зависимости от направления вращения. Инструмент 10 содержит также кодовый датчик 268 положения, который реагирует на обороты главного приводного вала 48, для преобразования нарастающего углового перемещения главного приводного вала 48 (или другого компонента главного ведущего узла), например, в соответствующую последовательность цифровых сигналов. В показанном варианте осуществления ведущая шестерня 124 содержит проксимальный приводной вал 270, который соединяется с кодовым датчиком 268 положения.
Инструмент 10 содержит также схему управления (не показанную), которую можно реализовать с использованием микроконтроллера или интегральной схемы какого-либо другого типа, которая получает цифровые сигналы от кодового датчика 268 положения. По сигналам от кодового датчика 268 положения схема управления может вычислять стадию срабатывания ножа 32 в концевом эффекторе 12. То есть схема управления может вычислять, полностью ли развернут, полностью ли отведен нож 32 или находится на промежуточной стадии. На основе вычисления стадии срабатывания концевого эффектора 12 схема управления может выдавать сигнал во второй электродвигатель 265 для управления его вращением, чтобы, тем самым, управлять возвратно-поступательным перемещением резьбового штока 266.
Во время работы, как показано на фиг. 37, когда смыкающий спусковой механизм 18 не зафиксирован в положении зажима, выстреливающий спусковой механизм 20 повернут от участка 26 ручки пистолетного типа рукоятки 6 настолько, что передняя поверхность 242 верхнего участка 230 выстреливающего спускового механизма 20 не находится в контакте с проксимальным концом резьбового штока 266. Когда оперирующий хирург отводит назад смыкающий спусковой механизм 18 и фиксирует его в положении зажима, выстреливающий спусковой механизм 20 слегка поворачивается к смыкающему спусковому механизму 18 так, что оперирующий хирург может ухватить выстреливающий спусковой механизм 20, как показано на фиг. 38. В данном положении передняя поверхность 242 верхнего участка 230 контактирует с проксимальным концом резьбового штока 266.
Затем, когда пользователь отводит выстреливающий спусковой механизм 20, после его поворота на первоначальный угол (например, на 5 градусов), датчик 110 работы электродвигателя может включаться таким образом, что, как изложено выше, датчик 110 посылает сигнал в электродвигатель 65 для включения его вращения вправо с частотой, пропорциональной величине усилия отвода, прилагаемого оперирующим хирургом к выстреливающему спусковому механизму 20. Правое вращение электродвигателя 65 приводит, через цепь зубчатых передач привода, во вращение главный приводной вал 48, что приводит нож 32 и скользящий блок 33 в движение по желобу 22, с разрезанием ткани, зажатой в концевом эффекторе 12. Схема управления получает от кодового датчика 268 положения выходные сигналы о наращивании числа оборотов, совершенных узлом главного приводного вала, и посылает сигнал во второй электродвигатель 265, чтобы вызвать вращение второго электродвигателя 265, что, в свою очередь, приводит к отведению резьбового штока 266 внутрь электродвигателя 265. Это позволяет верхнему участку 230 выстреливающего спускового механизма 20 поворачиваться против часовой стрелки, что дает возможность нижнему участку 228 выстреливающего спускового механизма также поворачиваться против часовой стрелки. При этом так как возвратно-поступательное перемещение резьбового штока 266 зависит от числа оборотов, совершенных узлом главного приводного вала, хирург, оперирующий инструментом 10, воспринимает, при захвате выстреливающего спускового механизма 20, тактильную обратную связь по положению концевого эффектора 12. Однако усилие отвода, прилагаемое оперирующим хирургом, не влияет непосредственно на приведение в движение узла главного приводного вала, так как выстреливающий спусковой механизм 20 не включен в цепь зубчатых передач привода в данном варианте осуществления.
Благодаря отслеживанию наращивания числа оборотов, совершенных узлом главного приводного вала, по выходным сигналам кодового датчика 268 положения, схема управления может вычислить, когда происходит полное срабатывание ножа 32 (т.е. полное выдвижение). В этот момент схема управления может выдать в электродвигатель 65 сигнал на реверсирование направления, чтобы вызвать отведение ножа 32. Реверсное направление вращения электродвигателя 65 приводит к вращению узла главного приводного вала в обратном направлении, что также обнаруживается кодовым датчиком 268 положения. По реверсному вращению, обнаруживаемому кодовым датчиком 268 положения, схема управления посылает сигнал во второй электродвигатель 265 для вызова его вращения в обратном направлении, чтобы резьбовой шток 266 начал продольное выдвижение из электродвигателя 265. Данное движение вынуждает верхний участок 230 выстреливающего спускового механизма 20 поворачиваться по часовой стрелке, что приводит к повороту по часовой стрелке нижнего участка 228. При этом оперирующий хирург может ощущать усилие, развиваемое по часовой стрелке выстреливающим спусковым механизмом 20, что обеспечивает для оперирующего хирурга обратную связь по положению отвода ножа 32 в концевом эффекторе 12. Схема управления может определять момент, когда нож 32 полностью отведен. В этот момент, схема управления может выдать в электродвигатель 65 сигнал на останов вращения.
В соответствии с другими вариантами осуществления, вместо схемы управления для определения положения ножа 32, можно применить вышеописанные датчики реверса электродвигателя и останова электродвигателя. Кроме того, вместо применения пропорционального датчика 110 для управления вращением электродвигателя 65, можно воспользоваться двухпозиционным переключателем или датчиком. В таком варианте осуществления оперирующий хирург не будет располагать возможностью управления частотой вращения электродвигателя 65. Точнее, электродвигатель будет вращаться с заданной частотой.
На фиг. 41-43 представлен примерный вариант осуществления эндоскопического режущего инструмента с механическим приводом и, в частности, его рукоятки 6, вала 8 и концевого эффектора 12. Дополнительные сведения об эндоскопическом режущем инструменте с механическим приводом можно найти в заявке на патент США № 11/052,632, «Surgical Stapling Instrument Incorporating A Multi-Stroke Firing Mechanism With Automatic End Of Firing Travel Retraction», которая целиком включена в настоящее описание посредством ссылки. Как показано на фиг. 41, концевой эффектор 12 реагирует на смыкающее движение, выполняемое на рукоятке 6 (не показанной на фиг. 41), в первую очередь, благодаря тому, что содержит упорную поверхность 1002 упора, соединенную с проксимальным концом 1004 упора, который содержит выступающие вбок шарнирные пальцы 25 упора, которые находятся с проксимальной стороны от вертикально выступающей лапки 27 упора. Шарнирные пальцы 25 упора поступательно перемещаются внутри отверстий 1006 овальной формы в желобе 22 для скобок для размыкания и смыкания упора 24 относительно желоба 22. Лапка 27 находится в зацеплении с загнутой лапкой 1007, продолжающейся внутрь отверстия 45 под лапку на дистальном конце 1008 смыкающей трубки 1005, при этом последняя заканчивается с дистальной стороны дистальной кромкой 1008, которая нажимает на упорную поверхность 1002 упора. Следовательно, когда смыкающая трубка 1005 перемещается в проксимальном направлении из ее разомкнутого положения, загнутая лапка 1007 смыкающей трубки 1005 оттягивает лапку 27 упора в проксимальном направлении, и шарнирные пальцы 25 упора перемещаются по отверстиям 1006 овальной формы желоба 22 для скобок и при этом вынуждают упор 24 одновременно поступательно смещаться в проксимальном направлении и поворачиваться вверх в разомкнутое положение. Когда смыкающая трубка 1005 перемещается в дистальном направлении, загнутая лапка 1007 в отверстии 45 под лапку отделяется от лапки 27 упора, и дистальная кромка 1008 толкает упорную поверхность 1002 упора и, тем самым, смыкает упор 24.
Как также показано на фиг. 41, вал 8 и концевой эффектор 12 содержат также компоненты, которые реагируют на выстреливающее движение выстреливающего штока 1010. В частности, выстреливающий шток 1010 находится в зацеплении с возможностью поворота с выстреливающим желобчатым элементом 1012, имеющим продольную выемку 1014. Выстреливающий желобчатый элемент 1012 продольно перемещается внутри обоймы 1016 непосредственно в ответ на продольное перемещение выстреливающего штока 1010. Продольная прорезь 1018 в смыкающей трубке 1005 связана в рабочем положении с правой и левой внешними боковинами 61, 62 рукоятки 6 (не показанными на фиг. 41). Длина продольной прорези 1018 в смыкающей трубке 1005 достаточно велика, чтобы допускать продольное перемещение относительно боковин 61, 62 рукоятки для выполнения выстреливающего и смыкающего перемещений, соответственно, соединительным звеном боковин 61, 62 рукоятки, проходящим сквозь продольную прорезь 1020 в обойме 1016 для зацепления с возможностью сдвига с продольным пазом 1014 в желобчатом элементе 1012 обоймы.
Дистальный конец желобчатого элемента 1012 обоймы прикреплен к проксимальному концу выстреливающей планки 1022, которая перемещается внутри обоймы 1016, в частности, внутри расположенной в ней направляющей 1024, чтобы выдвигать в дистальном направлении нож 32 в концевом эффекторе 12. Концевой эффектор 12 содержит кассету 34 для скобок, которую приводит в действие нож 32. Кассета 34 для скобок содержит лоток 1028, который вмешает корпус 1030 кассеты для скобок, клиновидный скользящий приводной блок 33, ведущие элементы 1034 скобок и скобки 1036. Далее следует понимать, что клиновидный скользящий приводной блок 33 продольно перемещается в выстреливающей выемке (не показанной), расположенной между лотком 1028 кассеты и корпусом 1030 кассеты. Клиновидный скользящий приводной блок 33 содержит кулачковые поверхности, которые контактируют с ведущими элементами 1034 скобок и поднимают их вверх, и, тем самым, выдвигают скобки 1036. Корпус 1030 кассеты для скобок дополнительно содержит открытую с проксимальной стороны вертикальную прорезь 1031 для прохода ножа 32. В частности, вдоль дистального конца ножа 32 создана режущая поверхность 1027 для разрезания ткани после ее сшивания скобками.
Следует понимать, что вал 8 изображен на фиг. 4 в виде вала без поворотного шарнира. Тем не менее, практические реализации настоящего изобретения могут включать в себя инструменты, способные выполнять шарнирный поворот, например, рассмотренные выше со ссылками на фиг. 1-4 и описанные в следующих патентах и заявках на патенты США, содержание каждого/ой из которых целиком включено в настоящую заявку посредством ссылки: (1) «SURGICAL INSTRUMENT INCORPORATING AN ARTICULATION MECHANISM HAVING ROTATION ABOUT THE LONGITUDINAL AXIS», публикация заявки на патент США № 2005/0006434, авторы Frederick E. Shelton IV, Brian J. Hemmelgarn, Jeffrey S. Swayze, Kenneth S. Wales, дата подачи 9 июля 2003 г.; (2) «SURGICAL STAPLING INSTRUMENT INCORPORATING AN ARTICULATION JOINT FOR A FIRING BAR TRACK», патент США № 6786382, автор Brian J. Hemmelgarn; (3) «A SURGICAL INSTRUMENT WITH A LATERAL-MOVING ARTICULATION CONTROL», патент США № 6981628, автор Jeffrey S. Swayze; (4) «SURGICAL STAPLING INSTRUMENT INCORPORATING A TAPERED FIRING BAR FOR INCREASED FLEXIBILITY AROUND THE ARTICULATION JOINT», патент США № 6964363, авторы Frederick E. Shelton IV, Michael Setser, Bruce Weisenburgh II; и (5) «SURGICAL STAPLING INSTRUMENT HAVING ARTICULATION JOINT SUPPORT PLATES FOR SUPPORTING A FIRING BAR», публикация заявки на патент США № 2005/0006431, авторы Jeffrey S. Swayze, Joseph Charles Hueil, дата подачи 9 июля 2003 г.
На фиг. 42-43 представлен вариант осуществления рукоятки 6, которая выполнена с возможностью применения в эндоскопическом режущем инструменте с механическим приводом, вместе с вариантом осуществления вала 8 и концевого эффектора 12, показанным выше на фиг. 41. Далее следует понимать, что для механического смыкания и выстреливания из концевого эффектора 12 можно использовать любую подходящую конструкцию рукоятки. На фиг. 42-43 рукоятка 6 хирургического сшивающего скобками и разрезного инструмента 10 содержит выстреливающий механизм 1060 с цепной передачей, который обеспечивает такие возможности, как повышение прочности, уменьшение размера рукоятки, минимум заедания и т.п.
Смыкание концевого эффектора 12 (не показанное на фиг. 42-43) обеспечивается поджатием смыкающего спускового механизма 18 к ручке 26 пистолетного типа рукоятки 6. Смыкающий спусковой механизм 18 поворачивается на смыкающем шарнирном пальце 252, который соединен с правой и левой внешними нижними боковинами 59, 60 рукоятки 6, что вызывает движение вперед верхнего участка 1094 смыкающего спускового механизма 18. Смыкающая трубка 1005 воспринимает данное смыкающее движение через смыкающую вилку 250, которая шарнирно соединена со смыкающей серьгой 1042 и верхним участком 1094 смыкающего спускового механизма 18, соответственно, штифтом 1044 смыкающей вилки и штифтом 1046 смыкающей серьги.
В полностью разомкнутом положении, показанном на фиг. 42, верхний участок 1094 смыкающего спускового механизма 18 находится в контакте с и удерживает запорный рычаг 1048 поворотной кнопки 30 разблокирования смыкания в показанном положении. Когда смыкающий спусковой механизм 18 достигает своего полностью нажатого положения, смыкающий спусковой механизм 18 отпускает запорный рычаг 1048, и поверхность 1050 примыкания поворачивается в зацепление с дистальным правым вырезом 1052 поворотного запорного рычага 1048 и, тем самым, удерживает смыкающий спусковой механизм 18 в данном зажатом или сомкнутом положении. Проксимальный конец запорного рычага 1048 поворачивается на боковом шарнирном соединении 1054 с боковинами 59, 60 и при этом раскрывает кнопку 30 разблокирования смыкания. Переходная дистальная сторона 1056 кнопки 30 разблокирования смыкания поджимается в проксимальном направлении пружиной 1058 сжатия, которая сжата между конструктивным элементом 1040 корпуса и кнопкой 30 разблокирования смыкания. В результате, кнопка 30 разблокирования смыкания поджимает запорный рычаг 1048 против часовой стрелки (если смотреть слева) в фиксирующий контакт с поверхностью 1050 примыкания смыкающего спускового механизма 18, что предотвращает отжим смыкающего спускового механизма 18, когда система 1040 выстреливания с цепной передачей находится в неотведенном состоянии.
При смыкающем спусковом механизме 18 в отведенном назад и полностью нажатом положении, выстреливающий спусковой механизм 20 не заблокирован и, в данном варианте осуществления, допускает неоднократное прижатие к ручке 26 пистолетного типа для выстреливания из концевого эффектора 12. Как показано, выстреливающий механизм 1060 с цепной передачей первоначально отведен назад и поджат для нахождения в данном положении составной пружиной 1062 растяжения/сжатия, которая закреплена внутри ручки 26 пистолетного типа рукоятки 6, при этом неподвижный конец 1063 данной пружины прикреплен к боковинам 59, 60, и подвижный конец 1064 прикреплен к изогнутому вниз и проксимальному, отведенному назад концу 1067 стальной ленты 1066.
Дистально расположенный конец 1068 стальной ленты 1066 прикреплен к звеньевому соединению 1070 для передачи нагрузки на конструкцию, которое, в свою очередь, прикреплено к переднему звену 1072a множества звеньев 1072a-1072d, которые образуют звеньевую рейку 1074. Звеньевая рейка 1074 является нежесткой, однако, содержит дистальные звенья, которые образуют прямой жесткий реечный узел, который может передавать значительное выстреливающее усилие через выстреливающий шток 1010 в валу 8, но при этом легко втягивается обратно в ручку 26 пистолетного типа, что сокращает до минимума продольный размер рукоятки 6. Следует понимать, что составная пружина 1062 растяжения/сжатия увеличивает доступную величину выстреливающего передвижения и при этом, по существу, наполовину, сокращает минимальную длину по сравнению с одиночной пружиной.
Выстреливающий спусковой механизм 20 поворачивается на штифте 96 выстреливающего спускового механизма, который присоединен к боковинам 59, 60 рукоятки. Верхний участок 228 выстреливающего спускового механизма 20 перемещается в дистальном направлении относительно штифта 96 выстреливающего спускового механизма, когда выстреливающий спусковой механизм 20 поджимают к ручке 26 пистолетного типа, с растягиванием проксимально расположенной пружины 222 натяжения выстреливающего спускового механизма, проксимально закрепленной между верхним участком 228 выстреливающего спускового механизма 20 и боковинами 59, 60. Верхний участок 228 выстреливающего спускового механизма 20 входит в зацепление с звеньевой рейкой 1074 во время каждого нажатия на выстреливающий спусковой механизм, посредством механизма 1078 вытяжения, который также расцепляется, когда отпускают выстреливающий спусковой механизм 20. Пружина 222 натяжения выстреливающего спускового механизма поджимает выстреливающий спусковой механизм 20 в дистальном направлении, при его отпускании, и расцепляет механизм 1078 вытяжения.
Когда выстреливающий механизм 1040 с цепной передачей приводят в действие, промежуточная шестерня 1080 поворачивается по часовой стрелке (если смотреть слева) вследствие зацепления с зубчатой верхней поверхностью 1082 звеньевой рейки 1074. Данный поворот передается на индикаторную шестерню 1084, которая поэтому поворачивается против часовой стрелки в ответ на поворот промежуточной шестерни 1080. Как промежуточная шестерня 1080, так и индикаторная шестерня 1084 закреплены с возможностью вращения к боковинам 59, 60 рукоятки 6. Передаточное отношение между звеньевой рейкой 1074, промежуточной шестерней 1080 и индикаторной шестерней 1084 в предпочтительном варианте можно подобрать так, чтобы зубья на зубчатой верхней поверхности 1082 имели размеры, которые обеспечивают им достаточную прочность, и чтобы индикаторная шестерня 1084 делала не более одного поворота за время полного выстреливающего передвижения выстреливающего механизма 1060 с цепной передачей.
Как подробно изложено далее в описании, индикаторная шестерня 1084 выполняет, по меньшей мере, четыре функции. Во-первых, когда звеньевая рейка 1074 полностью отведена, и оба спусковых механизма 18, 20 разжаты, как показано на фиг. 42, отверстие 1086 в кольцевом выступе 1088 на левой стороне индикаторной шестерни 1084 повернут к верхней поверхности 1090 запорного рычага 1048. Запорный рычаг 1048 поджат в отверстие 1086 вследствие контакта со смыкающим спусковым механизмом 18, который, в свою очередь, поджат в разжатое положение смыкающей пружиной 1092 натяжения. Пружина 1092 натяжения смыкающего спускового механизма прикреплена проксимально к верхнему участку 1094 смыкающего спускового механизма 18 и боковинам 59, 60 рукоятки и, следовательно, накапливает энергию, накопленную во время прижатия смыкающего спускового механизма 18, которая стремится отжать смыкающий спусковой механизм 18 в дистальном направлении в его разжатое положение.
Вторая функция индикаторной шестерни 1084 заключается в том, что она соединена с индикаторной головкой 1096 отвода, расположенной снаружи на рукоятке 6. Следовательно, индикаторная шестерня 1084 передает на индикаторную головку 1096 отвода информацию об относительном расположении выстреливающего механизма 1060, так что хирург получает визуальную индикацию о том, сколько ходов выстреливающего спускового механизма 20 требуется для завершения выстреливания.
Третья функция индикаторной шестерни 1084 состоит в том, чтобы осуществлять продольное и угловое перемещение рычага 1098 отпускания блокировки обратного хода механизма 1097 блокировки обратного хода (механизма муфты одностороннего хода), когда выполняют работу хирургическим сшивающим и разрезным инструментом 10. Во время выстреливающих ходов перемещение в проксимальном направлении рычага 1098 отпускания блокировки обратного хода индикаторной шестерней 1084 приводит в действие механизм 1097 блокировки обратного хода, который допускает перемещение выстреливающей планки 1010 в дистальном направлении и предотвращает перемещение выстреливающей планки 1010 в проксимальном направлении. Данное перемещение выдвигает также кнопку 1100 отпускания блокировки обратного хода из проксимального торца боковин 59, 60 для использования оператором, если возникает необходимость в отводе выстреливающего механизма 1060 с цепной передачей во время выстреливающих ходов. По завершении выстреливающих ходов индикаторная шестерня 1084 реверсирует направление вращения, когда выстреливающий механизм 1060 отводится. Реверсное вращение выводит из действия механизм 1097 блокировки обратного хода, убирает кнопку 1100 отпускания блокировки обратного хода в рукоятку 6 и поворачивает рычаг 1098 отпускания блокировки обратного хода вбок вправо для предоставления возможности непрерывного реверсного вращения индикаторной шестерни 1084.
Четвертая функция индикаторной шестерни 1084 состоит в том, чтобы воспринимать выполняемый вручную поворот индикаторной головки 1096 отвода (по часовой стрелке на виде, представленном на фиг. 42), чтобы отводить выстреливающий механизм 1060, при деблокированном механизме 1097 блокировки обратного хода, посредством чего преодолевается любое заедание в выстреливающем механизме 1060, преодоление которого представляет собой нелегкую задачу для составной пружины 1062 растяжения/сжатия. Данный вспомогательный отвод вручную можно применить после частичного выстреливания выстреливающего механизма 1060, иначе отвод не допускался бы механизмом 1097 блокировки обратного хода, который убирает кнопку 1100 отпускания блокировки обратного хода так, что данная кнопка не может сдвинуть вбок рычаг 1098 отпускания блокировки обратного хода.
Как также показано на фиг. 42-43, механизм 1097 блокировки обратного хода состоит из рычага 1098 отпускания блокировки обратного хода, открытого для доступа оператора и имеющего рабочее соединение на проксимальном конце с кнопкой 1100 отпускания блокировки обратного хода и на дистальном конце с вилкой 1102 блокировки обратного хода. В частности, дистальный конец 1099 рычага 1098 отпускания блокировки обратного хода сцеплен с вилкой 1102 блокировки обратного хода посредством штифта 1104 вилки блокировки обратного хода. Вилка 1102 блокировки обратного хода перемещается в продольном направлении для передачи вращения на трубку 1106 с фасонным пазом блокировки обратного хода, продольное перемещение которой сдерживается боковинами 59, 90 рукоятки, и которая охватывает выстреливающий шток 1010 дистально относительно соединения выстреливающего штока 1010 с звеньевым соединением 1070 звеньевой рейки 1074. Вилка 1102 блокировки обратного хода передает продольное перемещение от рычага 1098 отпускания блокировки обратного хода посредством штифта 1108 трубки с фасонным пазом на трубку 1106 с фасонным пазом блокировки обратного хода. А именно, продольное перемещение штифта 1108 трубки с фасонным пазом в скошенном пазу трубки 1106 с фасонным пазом блокировки обратного хода поворачивает трубку 1106 с фасонным пазом блокировки обратного хода.
Между проксимальным концом обоймы 1016 и трубкой 1106 с фасонным пазом блокировки обратного хода удерживаются, соответственно, пружина 1110 сжатия блокировки обратного хода, пластина 1112 блокировки обратного хода и кулачковая трубка 1114 блокировки обратного хода. Как показано, перемещение выстреливающего штока 1010 в проксимальном направлении вынуждает пластину 1112 блокировки обратного хода поворачиваться верхней частью назад, что усиливает фрикционный контакт с выстреливающим штоком 1010, который препятствует дальнейшему перемещению выстреливающего штока 1010 в проксимальном направлении.
Упомянутая пластина 1112 блокировки обратного хода поворачивается наподобие замка дверцы решетки, который удерживает дверцу решетки в открытом положении, когда трубка 1106 с фасонным пазом блокировки обратного хода отделена узким промежутком от кулачковой трубки 1114 блокировки обратного хода. В частности, пружина 1110 сжатия блокировки обратного хода может оказывать давление на верхнюю поверхность пластины 1112 для наклона пластины 1112 блокировки обратного хода в ее зафиксированное положение. Поворот трубки 1106 с фасонным пазом блокировки обратного хода вызывает кулачковое движение в дистальном направлении кулачковой трубки 1114 блокировки обратного хода и, тем самым, подталкивает верхнюю часть пластины 1112 блокировки обратного хода в дистальном направлении, преодолевает усилие пружины 1110 сжатия блокировки обратного хода и, таким образом, помещает пластину 1112 блокировки обратного хода в ненаклонное (перпендикулярное), незафиксированное положение, которое допускает отведение выстреливающего штока 1010 в проксимальном направлении.
Как показано, в частности, на фиг. 43, механизм 1078 вытяжения содержит собачку 1116, которая содержит дистально выступающий узкий наконечник 1118 и выступающий вправо боковой штифт 1120 на ее проксимальном конце, который вставлен с возможностью поворота сквозь отверстие 1076 в верхний участок 230 выстреливающего спускового механизма 20. С правой стороны выстреливающего спускового механизма 20, боковой штифт 1120 вмещает поджимной элемент, изображенный в виде поджимного диска 1122. Когда выстреливающий спусковой механизм 20 сдвигается вперед и назад, поджимной диск 1122 описывает дугу вблизи правой боковины 59 рукоятки 6 и переходит на дистальном участке его движения поджимной скос 1124, неразъемно выполненный на правой боковине 59 корпуса. В предпочтительном варианте поджимной диск 1122 может быть выполнен из упругого фрикционного материала, который вызывает поворот против часовой стрелки (если смотреть слева) бокового штифта 1120 собачки 1116 и, тем самым, вытягивает вниз дистально выступающий узкий наконечник 1118 в наклонную центральную канавку 1075 ближайшего звена 1072a-d, чтобы зацепить звеньевую рейку 1074.
Когда выстреливающий спусковой механизм 20 отпускают, поджимной диск 1122 соответственно фрикционно отжимает собачку 1116 в противоположном направлении, с подъемом, тем самым, узкого наконечника 1118 из наклонной центральной канавки 1075 звеньевой рейки 1074. Чтобы обеспечить расцепление наконечника 1118 под большой нагрузкой, и при почти полном передвижении собачки 1116 в дистальном направлении, правая сторона собачки 1116 поднимается на проксимально направленную и обращенную вверх скошенную поверхность 1126 с правой стороны смыкающей вилки 250, чтобы расцепить узкий наконечник 1118 от наклонной центральной канавки 1075. Если выстреливающий спусковой механизм 20 отпускают в любой другой точке, отличной от точки полного передвижения, то поджимной диск 1122 служит для подъема узкого наконечника 1118 из наклонной центральной канавки 1075. Хотя на фиг. изображен поджимной диск 1122, следует понимать, что форма поджимного элемента или диска 1122 представлена лишь для наглядности и может быть изменена с приданием ему множества форм, которые используют трение или вытяжение для включения или выключения выстреливания из концевого эффектора 12.
Различные варианты осуществления хирургического инструмента 10 способны производить запись состояний инструмента, по меньшей мере, в какой-то один момент времени во время применения. На фиг. 44 показана блок-схема системы 2000 для записи состояний инструмента 10. Следует понимать, что система 2000 может быть реализована в вариантах осуществления инструмента 10 с выстреливанием с электроприводной подачей или с применением электродвигателя, например, в соответствии с вышеприведенным описанием со ссылками на фиг. 1-40, а также в вариантах осуществления инструмента 10 с выстреливанием с механизированной подачей, например, в соответствии с вышеприведенным описанием со ссылками на фиг. 41-43.
Система 2000 может содержать различные датчики 2002, 2004, 2006, 2008, 2010, 2012 для определения состояний инструмента. Датчики можно расположить, например, на инструменте 10 или внутри него. В различных вариантах осуществления датчики могут быть специализированными датчиками, которые обеспечивают выходной сигнал только для системы 2000, или могут быть датчиками двойного применения, которые выполняют другие функции в инструменте 10. Например, вышеописанные датчики 110, 130, 142 могут быть выполнены с возможностью выдачи также выходного сигнала в систему 2000.
Каждый датчик выдает, прямо или косвенно, сигнал в запоминающее устройство 2001, которое записывает сигналы, как более подробно изложено ниже. Запоминающее устройство 2001 может быть устройством любого типа, способным хранить или записывать сигналы датчиков. Например, запоминающее устройство 2001 может содержать микропроцессор, электрически стираемую программируемую постоянную память (EEPROM) или любое другое подходящее устройство хранения данных. Запоминающее устройство 2001 может записывать сигналы, выдаваемые датчиками, любым подходящим способом. Например, в одном варианте осуществления, запоминающее устройство 2001 может записывать сигнал от конкретного датчика, когда сигнал изменяет состояние. В другом варианте осуществления, запоминающее устройство 2001 может записывать состояние системы 2000, например, сигналы от всех датчиков, содержащихся в системе 2000, когда сигнал от любого датчика изменяет состояние. Это может обеспечивать моментальный снимок состояния инструмента 10. В различных вариантах осуществления запоминающее устройство 2001 и/или датчики могут быть реализованы с включением в состав шинных изделий типа 1-WIRE, выпускаемых фирмой DALLAS SEMICONDUCTOR, например, EEPROM типа 1-WIRE.
В различных вариантах осуществления запоминающее устройство 2001 имеет внешний доступ, что обеспечивает возможность считывания внешним устройством, например, компьютером, состояний инструмента, записанных запоминающим устройством 2001. Например, запоминающее устройство 2001 может содержать порт 2020 данных. Порт 2020 данных может обеспечивать выдачу сохраненных состояний инструмента в соответствии с любым протоколом проводной или беспроводной связи в, например, последовательном или параллельном формате. Запоминающее устройство 2001 может также содержать сменный носитель 2021 данных в дополнение или вместо выходного порта 2020. Сменный носитель 2021 данных может быть устройством хранения данных любого подходящего типа, которое можно снимать с инструмента 10. Например, сменный носитель 2021 данных может содержать флэш-память любого подходящего типа, например, плату по стандарту Международной ассоциации производителей плат памяти для персональных компьютеров (PCMCIA), плату COMPACTFLASH, плату MULTIMEDIA, плату FLASHMEDIA и т.п. Сменный носитель 2021 данных может также содержать память на дисках любого подходящего типа, содержащую, например, переносимый жесткий диск, компактный диск (CD), цифровой видео-диск (DVD) и т.п.
Датчик 2002 смыкающего спускового механизма распознает состояние смыкающего спускового механизма 18. На фиг. 45 и 46 показан примерный вариант осуществления датчика 2002 смыкающего спускового механизма. На фиг. 45 и 46 датчик 2002 смыкающего спускового механизма расположен между смыкающим спусковым механизмом 18 и смыкающим шарнирным пальцем 252. Следует понимать, что подтягивание смыкающего спускового механизма 18 к ручке 26 пистолетного типа приводит к тому, что смыкающий спусковой механизм 18 оказывает усилие на смыкающий шарнирный палец 252. Датчик 2002 может реагировать на данное усилие и генерировать сигнал в ответ на него, например, в соответствии с тем, как пояснялось выше для датчика 110 и для фиг. 10A и 10B. В различных вариантах осуществления датчик 2002 смыкающего спускового механизма может быть цифровым датчиком, который показывает только то, приводят ли, или нет, смыкающий спусковой механизм 18 в действие. В различных вариантах осуществления датчик 2002 смыкающего спускового механизма может быть аналоговым датчиком, который показывает усилие, прилагаемое к смыкающему спусковому механизму 18, и/или положение смыкающего спускового механизма 18. Если датчик 2002 смыкающего спускового механизма является аналоговым датчиком, то между датчиком 2002 и запоминающим устройством 2001 логично было бы расположить аналого-цифровой преобразователь. Кроме того, следует понимать, что датчик 2002 смыкающего спускового механизма может иметь любую подходящую форму и располагаться в любом подходящем месте, которое позволяет распознавать состояние смыкающего спускового механизма.
Датчик 2004 смыкания упора может распознавать, сомкнут ли упор 24. На фиг. 47 представлен пример датчика 2004 смыкания упора. Датчик 2004 расположен вблизи или внутри отверстий 1006 овальной формы в желобе 22 для скобок, как показано. Когда упор 24 смыкается, шарнирные пальцы 25 упора сдвигаются по отверстиям 1006 овальной формы и входят в контакт с датчиком 2004, и вынуждают датчик 2004 генерировать сигнал, показывающий, что упор 24 смыкается. Датчик 2004 может быть цифровым или аналоговым датчиком любого подходящего типа, включая бесконтактный датчик и т.п. Следует понимать, что, когда датчик 2004 смыкания упора является аналоговым датчиком, то между датчиком 2004 и запоминающим устройством 2001 логично было бы расположить аналого-цифровой преобразователь.
Датчик 2006 нагрузки смыкания упора показан расположенным на внутренней нижней поверхности желоба 22 для скобок. При применении датчик 2006 может находиться в контакте с нижней стороной кассеты 34 для скобок (не показанной на фиг. 46). По мере того, как упор 24 смыкают, она оказывает на кассету 34 для скобок усилие, которое передается на датчик 2006. В качестве реакции, датчик 2006 генерирует сигнал. Сигнал может быть аналоговым сигналом, пропорциональным усилию, оказываемому на датчик 2006 кассетой 34 для скобок и обусловленному смыканием упора 24. Как показано на фиг. 44, аналоговый сигнал может подаваться в аналого-цифровой преобразователь 2014, который преобразует аналоговый сигнал в цифровой сигнал перед подачей его в запоминающее устройство 2001. Следует понимать, что варианты осуществления, в которых датчик 2006 является цифровым или двоичным датчиком, могут не содержать аналого-цифровой преобразователь 2014.
Датчик 110 выстреливающего спускового механизма распознает положение и/или состояние выстреливающего спускового механизма 20. В вариантах осуществления инструмента с электроприводной подачей или с применением электродвигателя, датчик выстреливающего спускового механизма может одновременно служить как вышеописанный датчик 110 работы электродвигателя. В дополнение датчик 110 выстреливающего спускового механизма можно выполнять в любой форме из вышеописанных и может быть аналоговым или цифровым. На фиг. 45 и 46 изображен дополнительный вариант осуществления датчика 110 выстреливающего спускового механизма. На фиг. 45 и 46 датчик выстреливающего спускового механизма установлен между выстреливающим спусковым механизмом 20 и шарнирным пальцем 96 выстреливающего спускового механизма. Когда выстреливающий спусковой механизм 20 подтягивают, он будет оказывать усилие на шарнирный палец 96 выстреливающего спускового механизма, которое воспринимается датчиком 110. Как показано на фиг. 44, в вариантах осуществления, в которых выходной сигнал датчика 110 выстреливающего спускового механизма является аналоговым, между датчиком 110 выстреливающего спускового механизма и запоминающим устройством 2001 логично обоснованно включение аналого-цифрового преобразователя 2016.
Датчик 2008 положения ножа распознает положение ножа 32 или режущей поверхности 1027 внутри желоба 22 для скобок. На фиг. 47 и 48 показаны варианты осуществления датчика 2008 положения ножа, которые пригодны для применения с валом 8 с механическим приводом и концевым эффектором 12, показанным на фиг. 41. Датчик 2008 содержит магнит 2009, сопряженный с выстреливающей планкой 1022 инструмента 10. Катушка 2011 расположена в охват выстреливающей планки 1022 и может быть установлена, например, вдоль продольного паза 1014 выстреливающего желобчатого элемента 1012 (см. фиг. 41). Когда нож 32 и режущая поверхность 1027 возвратно-поступательно перемещаются по желобу 22 для скобок, выстреливающая планка 1022 и магнит 2009 могут перемещаться вперед-назад сквозь катушку 2011. Данное движение относительно катушки наводит напряжение в катушке, пропорциональное положению выстреливающего штока внутри катушки и режущей кромки 1027 внутри желоба 22 для скобок. Данное напряжение может подаваться в запоминающее устройство 2001, например, через аналого-цифровой преобразователь 2018.
В различных вариантах осуществления датчик 2008 положения ножа, напротив, может быть реализован в виде последовательности цифровых датчиков (не показанных), расположенных в различных положениях на валу 8 или внутри него. Цифровые датчики могут распознавать характерный элемент выстреливающей планки 1022, например, магнит 2009, когда характерный элемент выполняет возвратно-поступательное перемещение по валу 8. Положение выстреливающей планки 1022 внутри вала 8 и, в расширительном смысле, положение ножа 32 внутри желоба 22 для скобок можно приближенно считать положением последнего сработавшего цифрового датчика.
Следует понимать, что положение ножа можно также определять в вариантах осуществления инструмента 10, содержащего концевой эффектор 12 с вращательным приводом и вал 8, например, описанные ранее со ссылками на фиг. 3-6. Кодовый датчик положения, например кодовый датчик 268 положения, может быть выполнен с возможностью генерирования сигнала, пропорционального вращению винтового вала 36 или любого другого приводного вала или зубчатого колеса. Поскольку вращение винта 36 и других приводных валов или зубчатых колес пропорционален перемещению ножа 32 по желобу 22, то сигнал, генерируемый кодовым датчиком 268 положения также пропорционален перемещению ножа 32. Следовательно, выходной сигнал кодового датчика 268 положения может подаваться в запоминающее устройство 2001.
Датчик 2010 присутствия кассеты может распознавать присутствие кассеты 34 для скобок внутри желоба 22 для скобок. В инструментах с электроприводной подачей или с использованием электродвигателя датчик 2010 присутствия кассеты может одновременно выполнять функцию датчика 136 блокировки кассеты, описанного выше со ссылкой на фиг. 11. На фиг. 50 и 51 представлен вариант осуществления датчика 2010 присутствия кассеты. В представленном варианте осуществления датчик 2010 присутствия кассеты содержит два контакта 2011 и 2013. В отсутствие кассеты 34, контакты 2011, 2013 составляют разомкнутую цепь. Когда кассета 34 присутствует, кассетный лоток 1028 кассеты 34 для скобок входит в контакт с контактами 2011, 2013, и образуется замкнутая цепь. Когда цепь разомкнута, датчик 2010 может выдавать сигнал логического нуля. Когда цепь замкнута, датчик 2010 может выдавать сигнал логической единицы. Выходной сигнал датчика 2010 подается в запоминающее устройство 2001, как показано на фиг. 44.
Датчик 2012 состояния кассеты может указывать, является ли кассета 34, установленная в желоб 22 для скобок, отработанной или израсходованной. Когда нож 32 поступательно перемещается по концевому эффектору 12, он толкает скользящий блок 33, который осуществляет выстреливание из кассеты для скобок. Затем нож 32 поступательно перемещается назад в свое исходное положение, причем скользящий блок 33 остается на дистальном конце кассеты. В отсутствие скользящего блока 33 для его направления, нож 32 может запасть в стопорную выемку 2022. Датчик 2012 может распознавать, присутствует ли нож 32 в стопорной выемке 2022, что косвенно указывает на то, израсходована ли кассета 34. Следует понимать, что в различных вариантах осуществления датчик 2012 может непосредственно распознавать присутствие скользящего блока на проксимальном конце кассеты 34, что исключает необходимость западания ножа 32 в стопорную выемку 2022.
На фиг. 52A и 52B показана последовательность 2200 этапов работы с вариантами осуществления хирургического инструмента 10, выполненного в виде эндоскопического режущего инструмента и располагающего возможностью записи состояний аппарата в соответствии с различными вариантами осуществления. На этапе 2202 упор 24 инструмента 10 может быть сомкнута. Это вынуждает датчик 2002 смыкающего спускового механизма и датчик 2006 смыкания упора изменять состояние. В ответ запоминающее устройство 2001 может записать состояние всех датчиков в системе 2000 на этапе 2203. На этапе 2204 инструмент 10 можно вводить в пациента. Когда инструмент введен, упор 24 можно разомкнуть и сомкнуть на этапе 2206, например, для манипулирования тканью в операционном поле. Каждое размыкание и смыкание упора 24 вынуждает датчик 2002 смыкающего спускового механизма и/или датчик 2004 смыкания упора изменять состояние. В ответ, запоминающее устройство 2001 записывает состояние системы 2000 на этапе 2205.
На этапе 2208 ткань зажимают для разрезания и сшивания скобками. Если упор 24 не сомкнут на этапе 2210 решения, то требуется продолжение зажима. Если упор 24 сомкнут, то датчики 2002, 2004 и/или 2006 могут изменить состояние, что дает указание запоминающему устройству 2001 записать состояние системы на этапе 2213. Эта запись может включать в себя давление смыкания, получаемое от датчика 2006. На этапе 2212 возможно осуществление разрезания и сшивания скобками. Датчик 110 выстреливающего спускового механизма может изменять состояние, когда выстреливающий спусковой механизм 20 подтягивают к ручке 26 пистолетного типа. Кроме того, когда нож 32 будет перемещаться по желобу 22 для скобок, датчик 2008 положения ножа будет изменять состояние. В ответ, запоминающее устройство 2001 может записать состояние системы 2000 на этапе 2013.
Когда операции разрезания и сшивания скобками завершаются, нож 32 может вернуться в положение перед выстреливанием. Так как кассета 34 на данный момент отработана, нож 32 может запасть в стопорную выемку 2022 и, тем самым, изменить состояние датчика 2012 состояния кассеты и запустить запись запоминающим устройством 2001 состояния системы 2000 на этапе 2015. Затем упор 24 можно разомкнуть для отпускания ткани. Это может вызвать изменение состояния, по меньшей мере, какого-то одного из датчика 2002 смыкающего спускового механизма, датчика 2004 смыкания упора и датчика 2006 нагрузки смыкания упора, и, в результате, состояние системы 2000 записывается на этапе 2017. После отпускания ткани упор 24 можно снова сомкнуть на этапе 2220. Это вызывает еще одно изменение состояния, по меньшей мере, датчиков 2002 и 2004, что, в свою очередь, приводит к тому, что запоминающее устройство 2001 записывает состояние системы на этапе 2019. Затем инструмент 10 можно вывести из пациента на этапе 2222.
Если инструмент 10 требуется повторно использовать во время той же самой процедуры, упор можно разомкнуть на этапе 2224, с включением еще одной записи состояния системы на этапе 2223. Отработанную кассету 34 можно извлечь из концевого эффектора 12 на этапе 2226. Это приводит к изменению состояния датчика 2010 присутствия кассеты и обуславливает запись состояния системы на этапе 2225. На этапе 2228 можно вставить другую кассету 34. Это приводит к изменению состояния датчика 2010 присутствия кассеты и к записи состояния системы на этапе 2227. Если другая кассета 34 является новой кассетой, как указано на этапе 2230 принятия решения, ее установка также может привести к изменению состояния датчика 2012 состояния кассеты. В данном случае состояние системы может быть записано на этапе 2231.
На фиг. 53 представлена примерная таблица 2300 памяти из запоминающего устройства 2001 в соответствии с различными вариантами осуществления. Таблица 2300 памяти содержит ряд столбцов 2302, 2304, 2306, 2308, 2310, 2312, 2314, 2316 и строк (не размеченных). Столбец 2302 показывает номер события для каждой из строк. Другие столбцы представляют выходной сигнал одного датчика системы 2000. Все показания датчиков, записанные в данный момент времени, могут быть записаны в одной строке под одинаковым номером события. Следовательно, каждая строка представляет момент, когда записывается, по меньшей мере, один из сигналов от датчиков системы 2000.
Столбец 2304 содержит список нагрузок смыкания, записанных при каждом событии. Упомянутый список может отражать выходной сигнал от датчика 2006 нагрузки смыкания упор. Столбец 2306 содержит список положений выстреливающего хода. Упомянутый список может быть получен из датчика 2008 положения ножа. Например, полный ход ножа 32 можно разделить на сегменты. Число в списке в столбце 2306 может представлять сегмент, на котором в данный момент находится нож 32. Выстреливающая нагрузка представлена в списке в столбце 2308. Упомянутая нагрузка может быть получена из датчика 110 выстреливающего спускового механизма. Положение ножа представлено в списке в столбце 2310. Положение ножа может быть получено из датчика 2008 положения ножа аналогично выстреливающему ходу. Разомкнутое или сомкнутое состояние упора 24 может быть указано в списке в столбце 2312. Данное значение может быть получено из выходного сигнала датчика 2004 смыкания упора и/или датчика 2006 нагрузки смыкания упора. Тот факт, присутствует ли скользящий блок 33, или израсходована ли кассета 34, может быть указан в столбце 2314. Данное значение может быть получено из датчика 2012 состояния кассеты. И, наконец, факт присутствия или отсутствия кассеты 34 может быть указан в столбце 2316. Данное значение может быть получено из датчика 2010 присутствия кассеты. Следует понимать, что в запоминающем устройстве 2001 можно сохранять различные другие значения, включая, например, конец и начало выстреливающих ходов, например, измеряемые датчиками 130, 142.
На фиг. 54 и 55 показан другой вариант осуществления системы 2000. Вариант осуществления, изображенный на фиг. 54, аналогичен варианту осуществления, показанному на фиг. 44, за исключением того, что на фиг. 54 датчики 2002-2010 связаны с блоком 2400 управления, предпочтительно, расположенным в рукоятке 6 инструмента и, в более предпочтительном варианте, в участке 26 ручки пистолетного типа рукоятки 6. Блок 2400 управления может содержать процессор 2402 и запоминающее устройство 2001. Запоминающее устройство 2001 может содержать блок 2404 постоянной памяти и блок 2406 оперативной памяти. Блок 2400 управления может также содержать аналого-цифровые преобразователи (ADC) и цифроаналоговые преобразователи (DAC) (не показанные) для связи с датчиками 2002-2010. Блок 2404 постоянной памяти может содержать блоки памяти типа EPROM и/или флэш-памяти типа EEPROM. Блок 2406 оперативной памяти может содержать блок энергозависимой памяти, блок памяти с произвольной выборкой (RAM). Различные компоненты блока 2400 управления могут быть дискретными или могут быть интегрированы в одном или нескольких компонентах. Например, в одном варианте осуществления процессор 2402, ROM (постоянная память) 2404, RAM (память с произвольной выборкой) 2406, преобразователи DAC и преобразователи ADC могут входить в состав микроконтроллера или компьютера на микросхеме.
Блок 2400 управления может получать питание от источника 2408 питания, например, батареи. Для инструментов 10 с электродвигателем постоянного тока для приведения в действие концевого эффектора, источник 2408 питания, который питает блок 2400 управления, может быть тем же источником питания, который питает электродвигатель, или для блока 2400 управления и электродвигателя можно использовать разные источники питания.
Выходные сигналы из различных датчиков могут сохраняться в цифровой форме в одном из блоком 2404, 2406 памяти или обоих. В опубликованной заявке на патент США № 2007/0175964 A1, которая целиком включена в настоящую заявку посредством ссылки, предлагается эндоскопический режущий инструмент, содержащий запоминающее устройство для хранения и записи данных датчиков. Выходные сигналы некоторых из вышеупомянутых датчиков могут быть в аналоговой форме. При использовании датчиков упомянутых типов можно применять преобразователи ADC для преобразования сигналов аналоговых датчиков в цифровую форму для сохранения в блоках 2404, 2406 памяти. Кроме того, датчики могут быть связаны с блоком 2400 управления проводными и/или беспроводными линиями связи. Например, датчики и блок 2400 управления могут быть связаны с шиной 1-WIRE или I2C. В вариантах осуществления, в которых датчики связаны с блоком 2400 управления беспроводными средствами, датчики могут содержать транспондеры, которые связаны с приемопередатчиком (не показанным) блока 2400 управления.
Хотя на фиг. 44 и не показано, инструмент 10 может также содержать, по меньшей мере, один датчик шарнирного поворота, который определяет состояние шарнирного поворота концевого эффектора. Например, датчики шарнирного поворота могут находиться внутри или вблизи шарнира сочленения и определять шарнирный поворот концевого эффектора 12 относительно вала 8. Датчики шарнирного поворота могут быть также связаны с блоком 2400 управления, и данные из датчиков шарнирного поворота могут сохраняться в запоминающем устройстве 2001 блока 2400 управления. Заявка на патент США № 12/124,655, «Surgical Instrument With Automatically Reconfigurable Articulating End Effector», поданная 21 мая 2008 г., которая целиком включена в настоящую заявку посредством ссылки, содержит дополнительные сведения, касающиеся упомянутых датчиков шарнирного поворота. Кроме того, датчики могут содержать различные датчики, связанные с электродвигателем, которые определяют режим электродвигателя 65, например, число оборотов в минуту и т.п.
В соответствии с различными вариантами осуществления, данные, сохраняемые в запоминающем устройстве 2001, могут быть зашифрованы. Например, один из блоков 2404, 2406 памяти, например, ROM 2404, может хранить код или программное обеспечение для шифрования, который (или которое), при исполнении процессором 2402, предписывают процессору 2402 зашифровывать данные датчиков, принимаемые из датчиков и сохраняемые в запоминающем устройстве 2001.
Блок 2400 управления может также содержать порт 2020 вывода, который доступен для внешнего удаленного компьютерного устройства 2420 по линии 2422 связи, соединенной с портом 2020 вывода. Линия 2422 связи может быть проводной или беспроводной линией связи. Например, порт 2020 вывода может содержать порт последовательного ввода-вывода данных, например, порт USB (универсальной последовательной шины) (включая порты USB типа A, типа B, Mini-A или Mini-B), порт интерфейса IEEE 1394 (включая IEEE 1394a, 1394b или 1394c), порт RS-232, порт RS-423, порт RS-485, оптический порт, например, порт SONET (синхронной оптической сети) или SDH, или любой другой подходящий порт последовательного ввода-вывода данных для проводной линии 2422 связи с последовательной передачей данных. Кроме того, линия 2422 связи может быть линией параллельной передачи данных, например, типа ISA, ATA, SCSI или PCI. В данных обстоятельствах, порт 2020 вывода может быть соответствующим портом параллельного вывода данных. Кроме того, линия 2422 связи может быть беспроводной линией передачи данных, например, такой линией, которая использует один из стандартов IEEE 802.11.
Удаленное компьютерное устройство 2420 может быть любым устройством с процессором и памятью и с возможностью связи с блоком 2400 управления и загрузки данных датчиков, хранимых в запоминающем устройстве 2001. Например, удаленное компьютерное устройство 2420 может быть настольным компьютером, портативным компьютером, сервером, рабочей станцией, карманным компьютером, миникомпьютером, носимым компьютером и т.п. Упомянутое удаленное компьютерное устройство 2420 может внешним относительно инструмента 10 (т.е. не входить в состав инструмента 10) и может находиться относительно близко к инструменту 10, когда в компьютерное устройство 2420 загружают данные, или компьютерное устройство 2420 может находиться дальше от инструмента 10, например, в соседнем помещении или даже дальше.
На фиг. 56 представлена блок схема последовательности операций процесса в соответствии с различными вариантами осуществления настоящего изобретения. Процесс начинается на этапе 2500, на котором врач выполняет хирургическую операцию с применением инструмента 10. На этапе 2502 различные датчики в инструменте собирают данные и передают данные в блок 2400 управления. На этапе 2504 данные могут быть зашифрованы блоком 2400 управления, и, на этапе 2506, зашифрованные данные сохраняются в блоке 2001 памяти. В других вариантах осуществления, шифровки данных не требуется, или зашифровывается только часть снятых датчиками данных. Затем, на этапе 2508, устанавливается линия передачи данных между удаленным компьютерным устройством 2420 и блоком 2400 управления, например, через порт 2020 вывода. Затем, на этапе 2510, некоторые или все данные из датчиков, сохраненные в блоке 2001 памяти, загружаются в удаленное компьютерное устройство 2420. Что касается вариантов осуществления, в которых сохраняемые данные зашифровываются, то удаленное компьютерное устройство 2420 может дешифровать данные перед их загрузкой в запоминающее устройство в удаленном компьютерном устройстве 2420. На этапе 2512 можно манипулировать данными, хранящимися на данный момент в удаленном компьютерном устройстве 2420. Например, можно выполнять вычисления с данными или их анализ, или данные можно загрузить или передать в другой информационный носитель.
Устройства, описанные в настоящей заявке, могут быть выполнены для отправки в отходы после одной процедуры (которая может содержать несколько операций выстреливания), или упомянутые устройства могут быть выполнены для применения в нескольких процедурах. Однако, в обоих случаях, устройство можно восстанавливать для повторного применения после, по меньшей мере, одной процедуры. Восстановление может включать в себя любую комбинацию этапов разборки устройства, последующие чистку или замену конкретных деталей, и затем повторную сборку. В частности, устройство можно разбирать, и любое число конкретных деталей или частей устройства можно селективно заменять или снимать в любой комбинации. После чистки и/или замены конкретных частей, устройство можно повторно собрать для последующего использования, либо в ремонтном учреждении, либо персоналом операционного блока непосредственно перед хирургической процедурой. Специалистам в данной области техники будет очевидно, что восстановление устройства можно выполнять с применением множества различных методов для разборки, очистки/замены и повторной сборки. Как применение данных методов, так и получаемое восстановленное устройство находятся в пределах объема настоящего изобретения.
Различные варианты осуществления изобретения, описанные в настоящей заявке, будут, предпочтительно, подвергаться обработке перед хирургической операцией. Сначала новый или пользованный инструмент получают и, при необходимости, подвергают очистке. Затем инструмент можно стерилизовать. Согласно одному методу стерилизации, инструмент помещают в закрытую и герметизируемую тару, например, термоформованную пластиковую оболочку с покрытием из листа материала TYVEK®. Затем тару и инструмент помещают в поле действия излучения, которое может проникать сквозь тару, например, гамма-излучения, рентгеновского излучения или потока высокоэнергетических электронов. Излучение убивает бактерии на инструменте и в таре. Затем стерилизованный инструмент можно хранить в стерильной таре. Герметизированная тара сохраняет инструмент в стерильном состоянии для вскрытия в медицинском учреждении.
Устройство рекомендуется стерилизовать. Стерилизацию можно выполнять множеством способов, известных специалистам в данной области техники, включая способы с бета- или гамма-излучением, этиленоксидом, паром и другие способы.
Хотя выше настоящее изобретение пояснялось посредством описания нескольких вариантов осуществления, и, хотя, наглядные варианты осуществления описаны выше со всеми подробностями, заявитель не предполагает сужать или как-либо ограничивать объем притязаний прилагаемой формулы изобретения упомянутыми подробностями. Дополнительные преимущества и модификации могут быть легко обнаружены специалистами в данной области техники. Различные варианты осуществления настоящего изобретения отражают многочисленные усовершенствования по сравнению с ранее известными способами сшивания скобками, которые требуют использования скобок с разными размерами в одной кассете для получения скобок, которые имеют разные формованные (окончательные) высоты.
Соответственно, настоящее изобретение описано на примере эндоскопических процедур и устройств. Однако применение в настоящей заявке таких терминов, как «эндоскопический» не следует интерпретировать в смысле ограничения настоящего изобретения хирургическим разрезным и сшивающим инструментом для применения только в сочетании с эндоскопической трубкой (т.е. канюлей или троакаром). Напротив, предполагается, что настоящее изобретение может найти применение при любой процедуре, при которой доступ ограничен, включая, но без ограничения, лапароскопические процедуры, а также при открытых процедурах. Кроме того, оригинальные и новые аспекты различных вариантов осуществления кассеты для скобок в соответствии с настоящим изобретением могут оказаться полезными при применении в сочетании с другими формами сшивающих скобками устройств, не выходящими за пределы существа и объема настоящего изобретения.
Любой патент, публикация или информация, целиком или частично, которые упомянуты как включенные в настоящую заявку посредством ссылки, включены в настоящую заявку только в таких пределах, в которых включенные данные не противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем документе. По существу, сведения, приведенные в явном виде в настоящей заявке, заменяют собой любые противоречащие данные, включенные в настоящую заявку посредством ссылки.
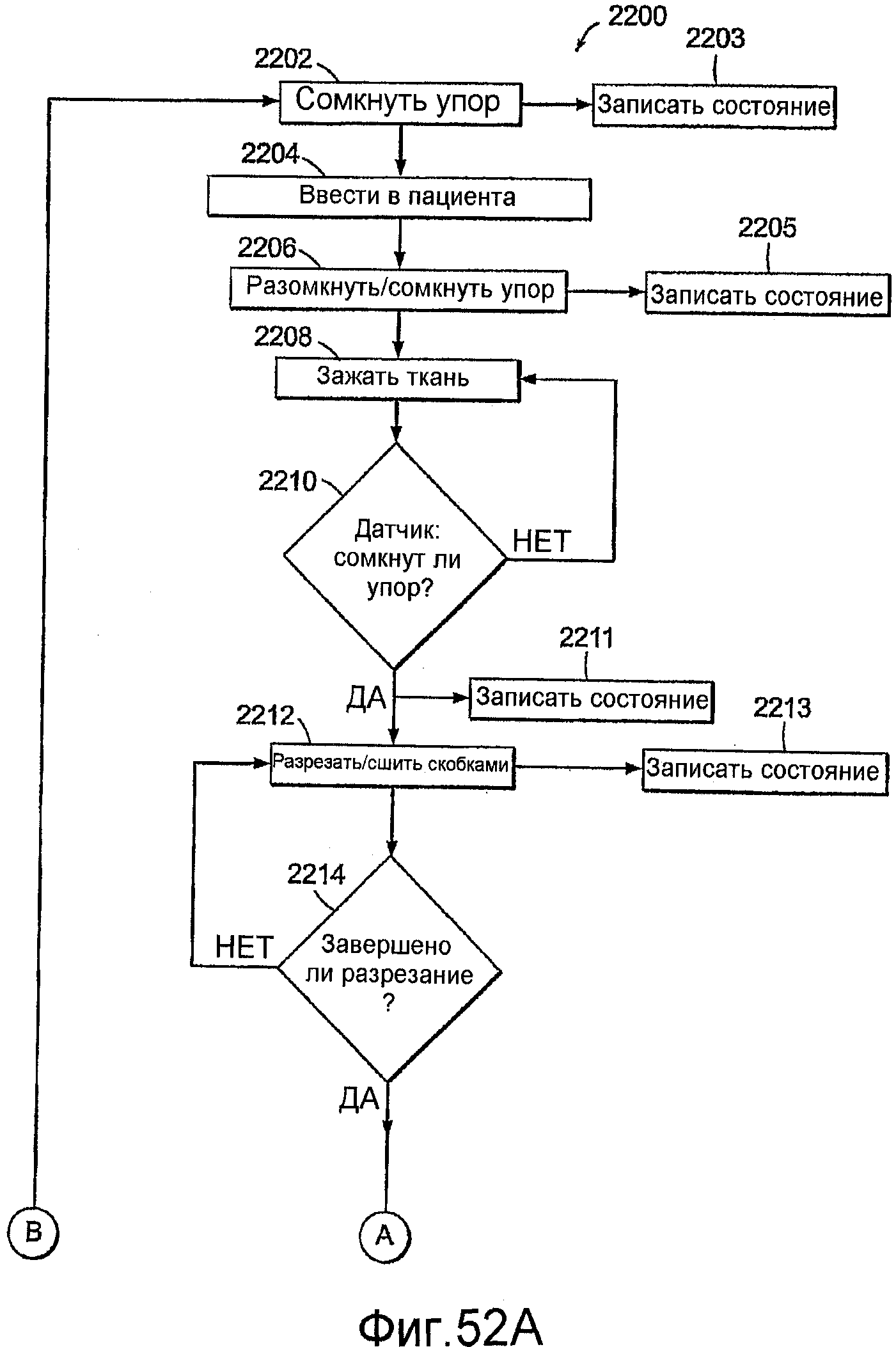
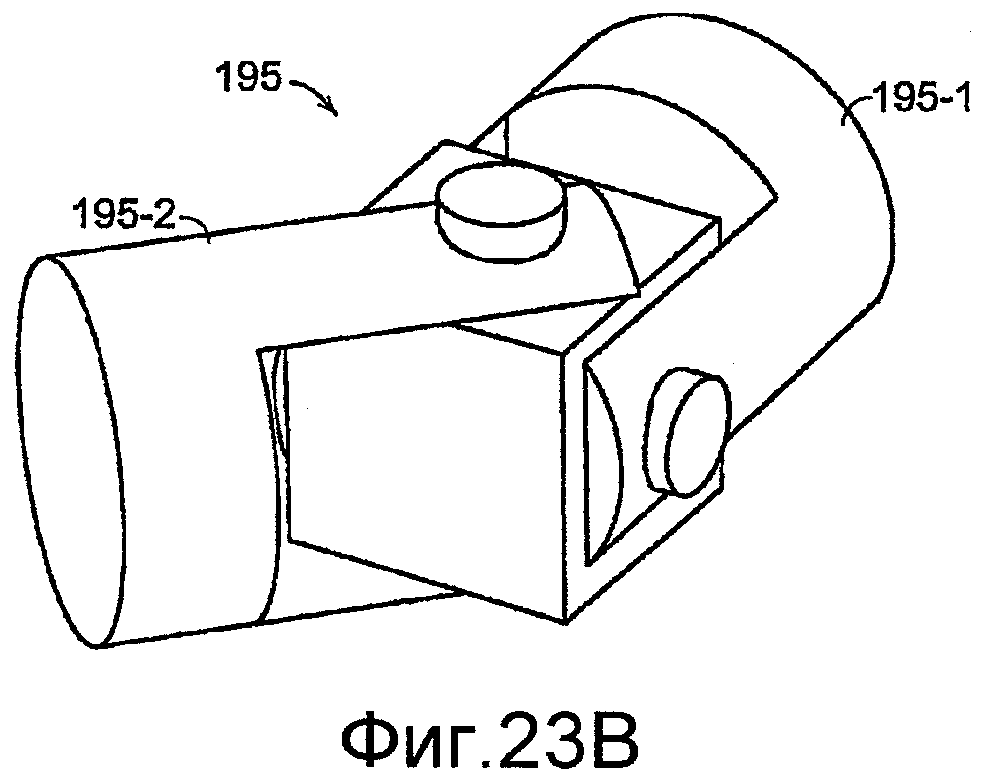
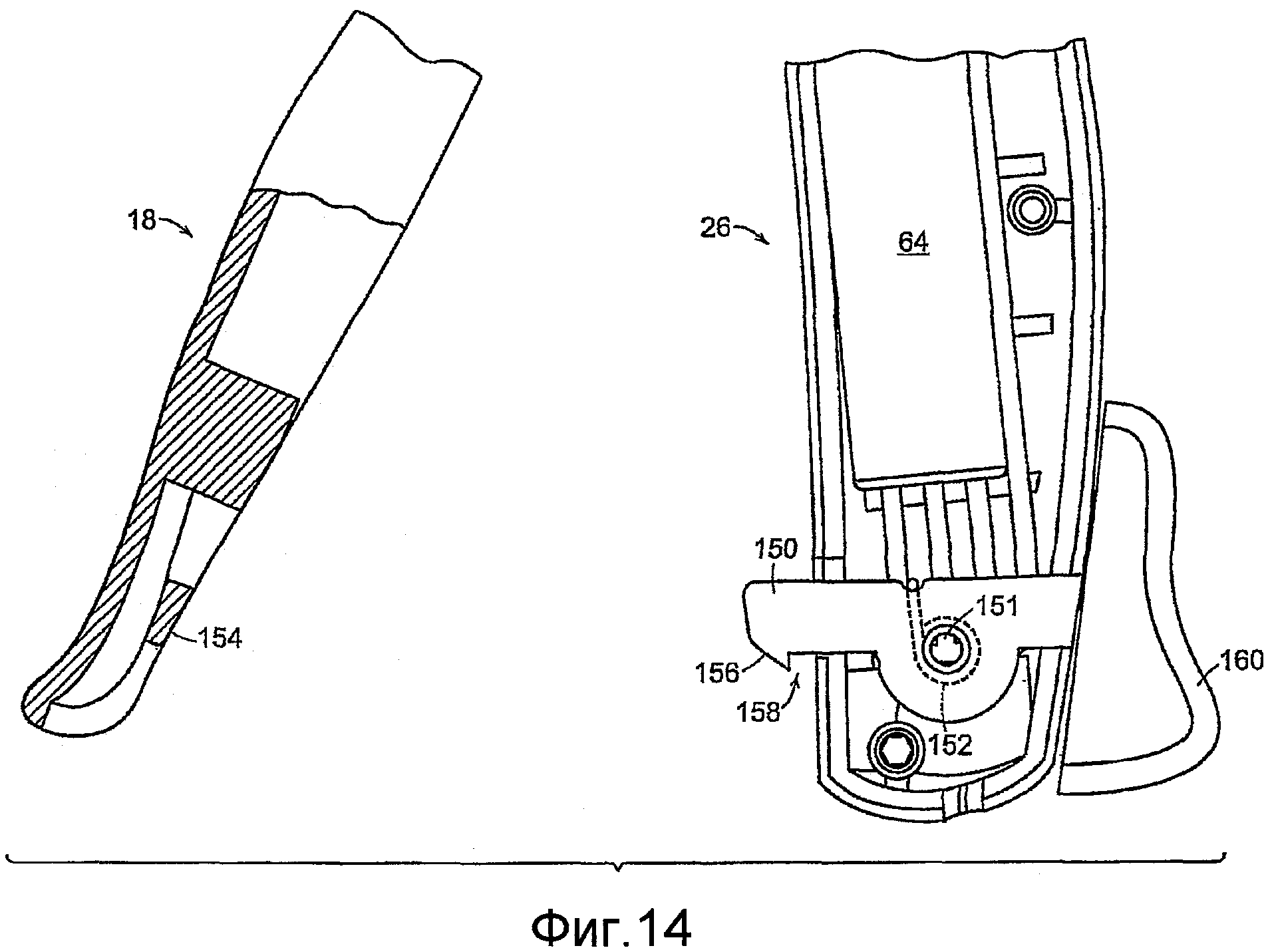
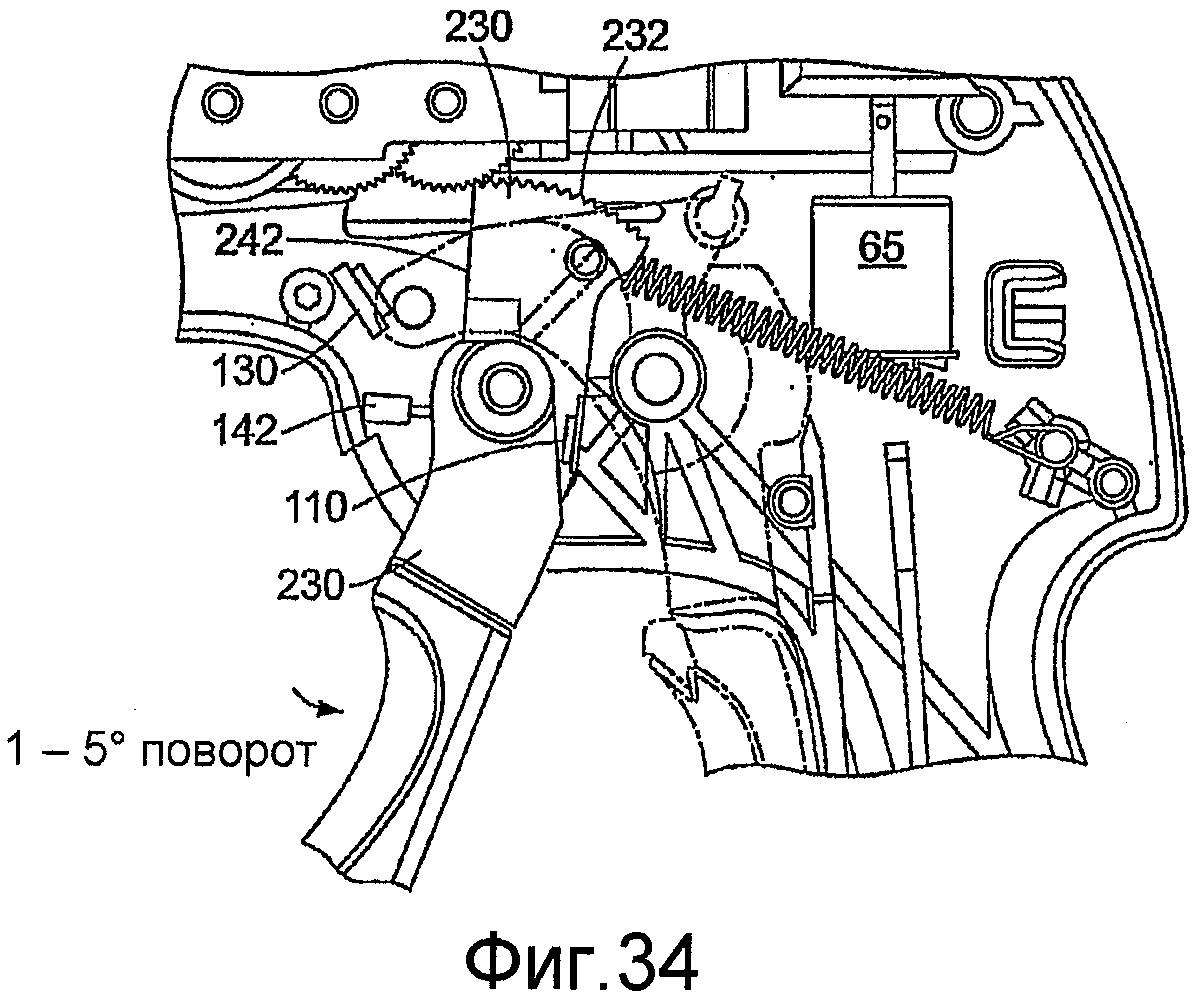
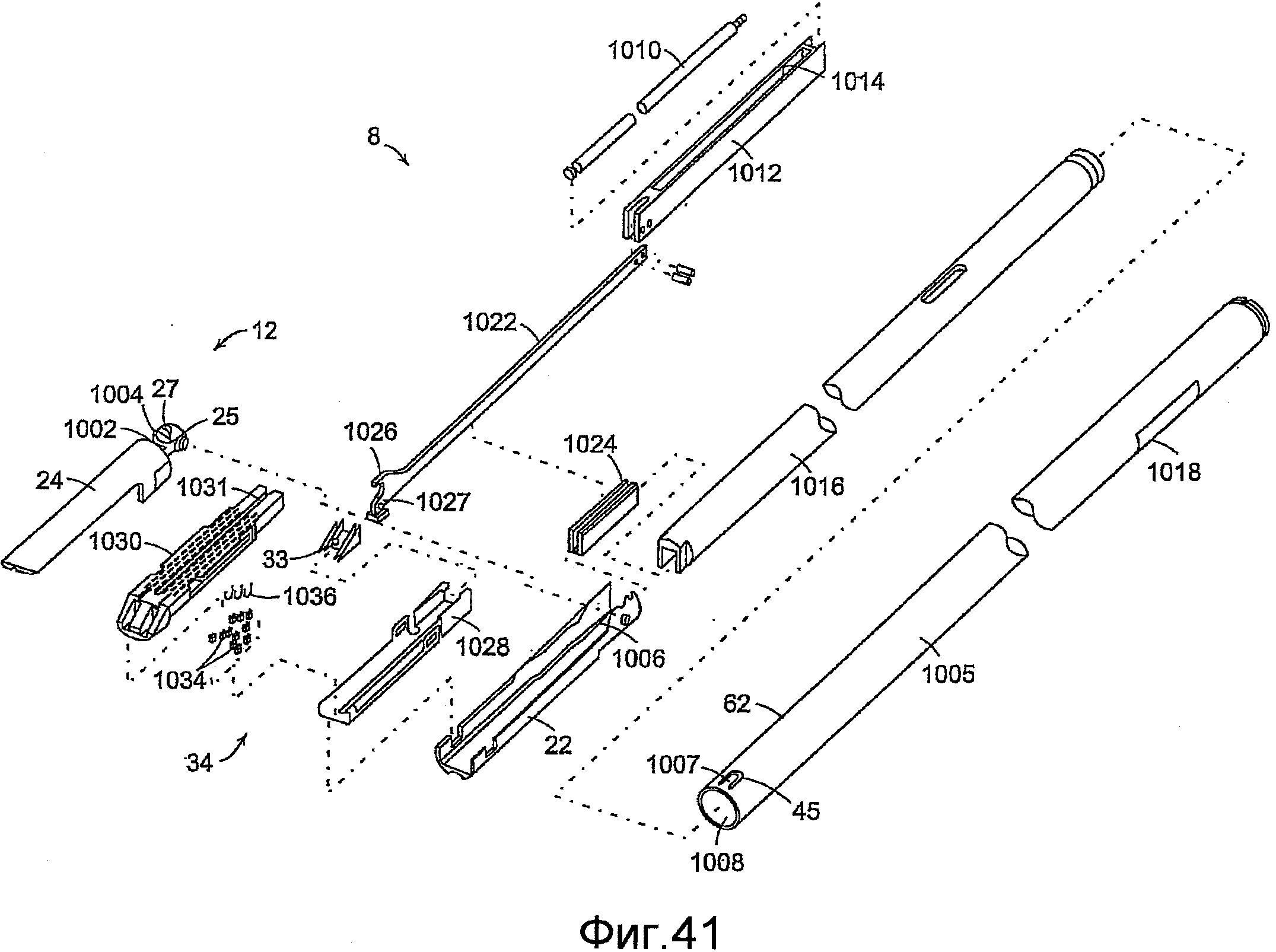
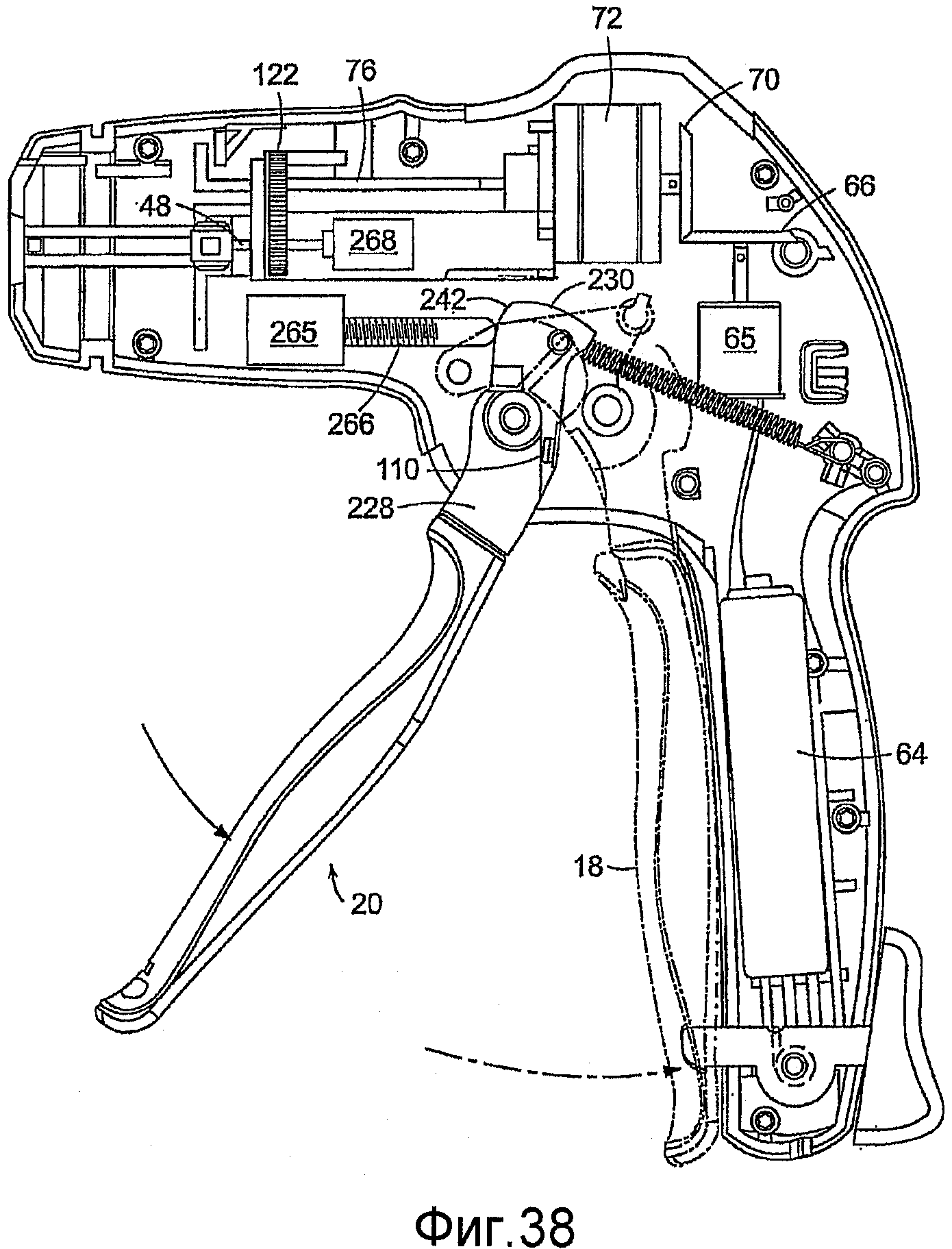
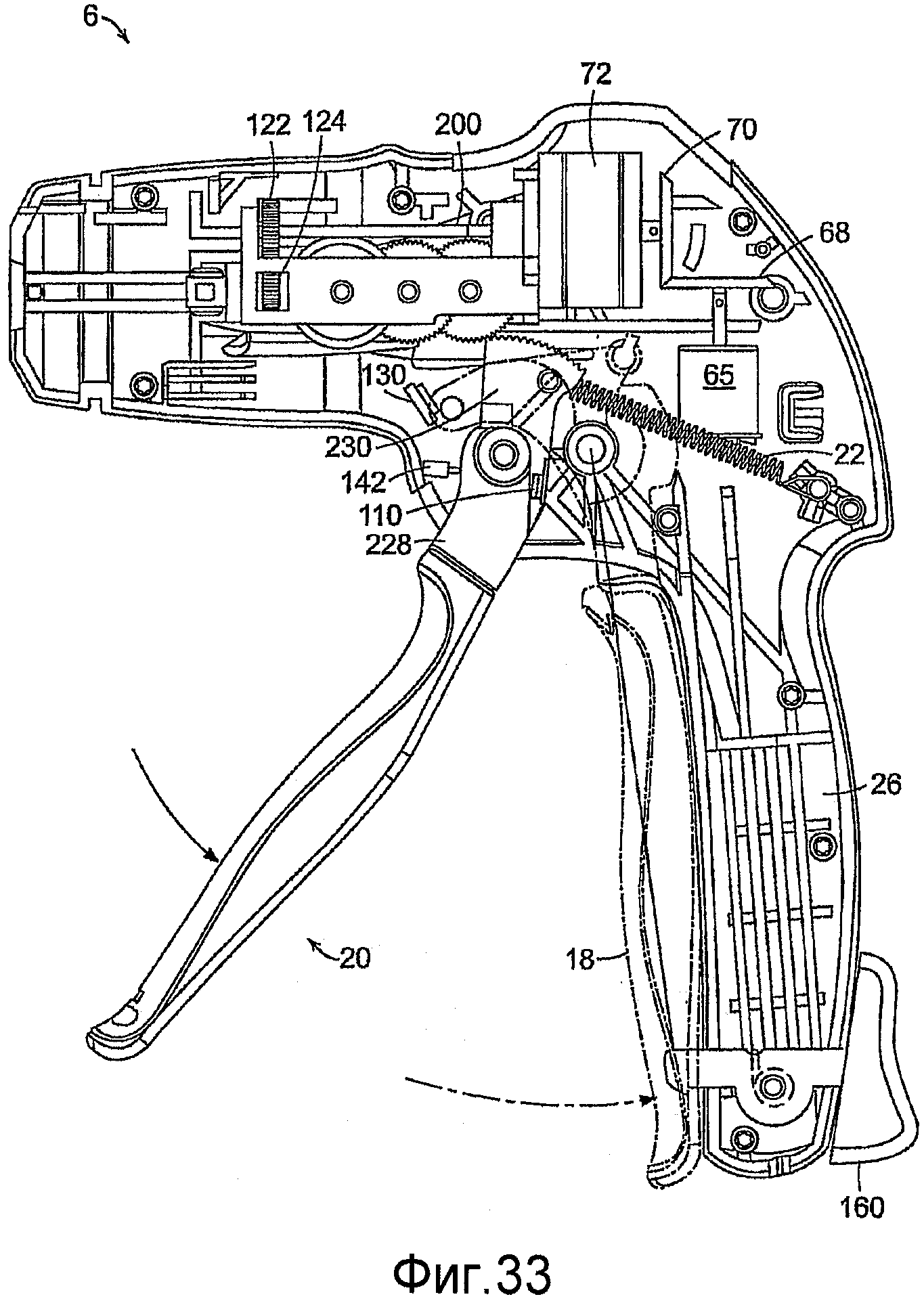
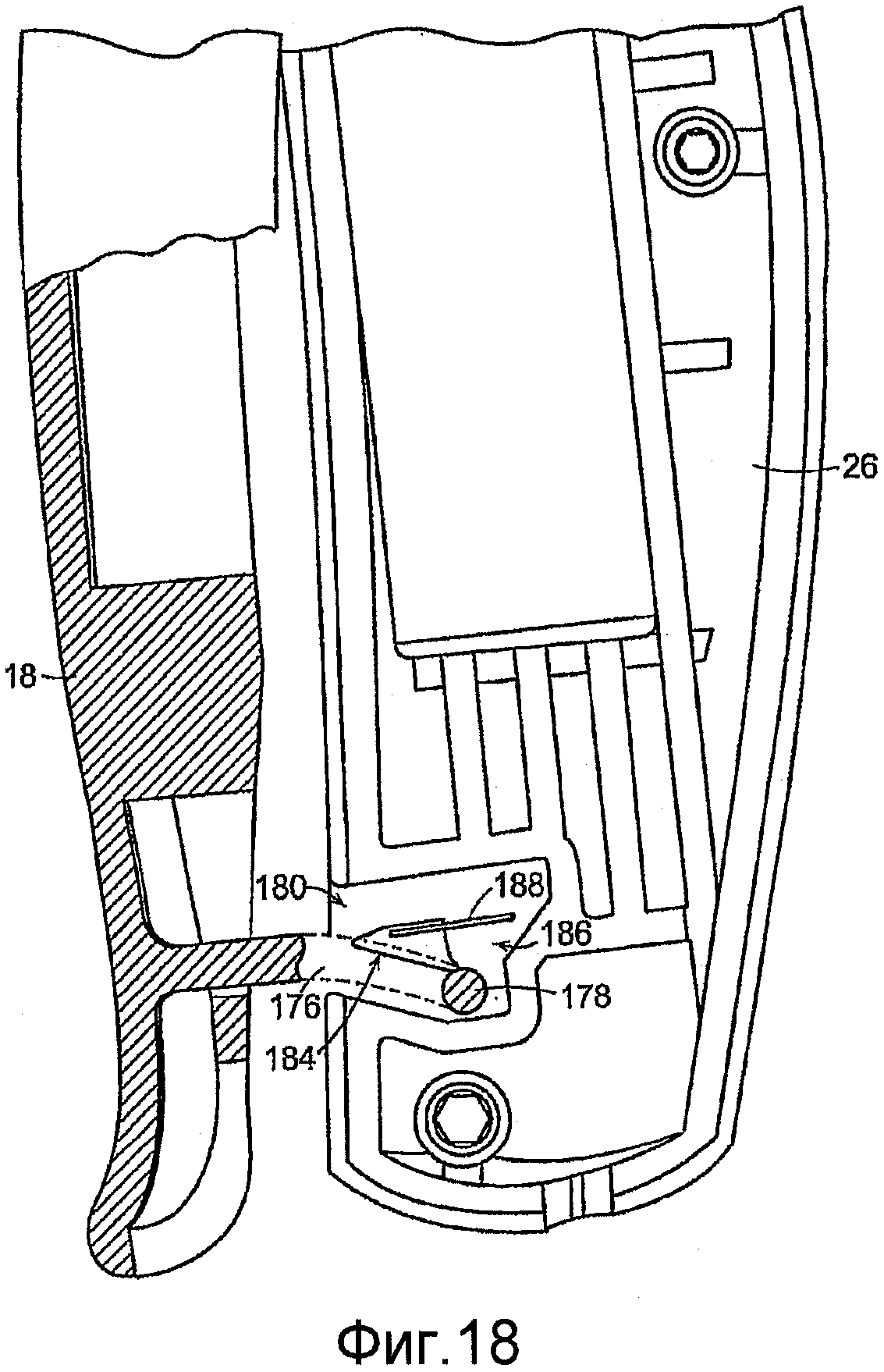
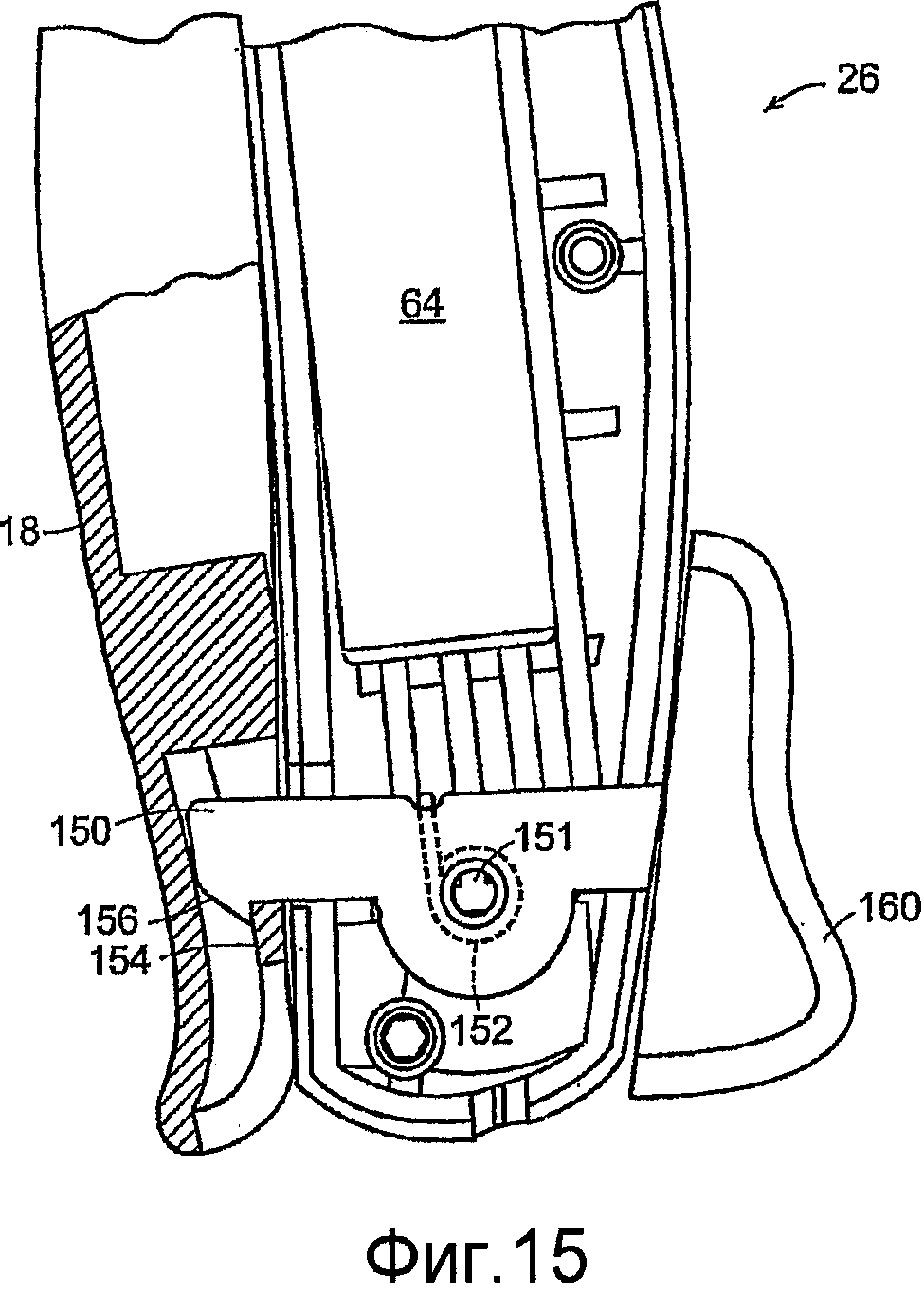
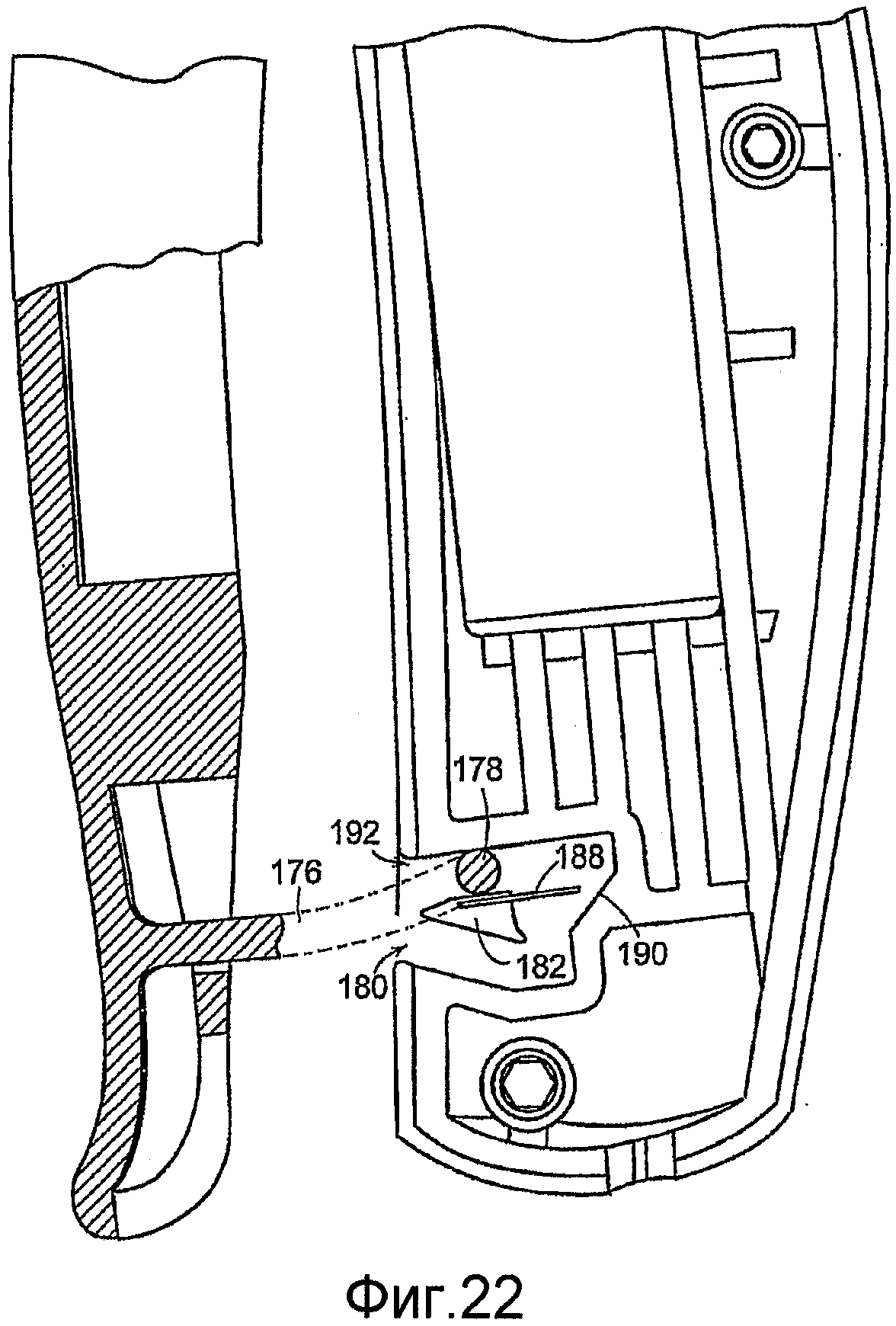
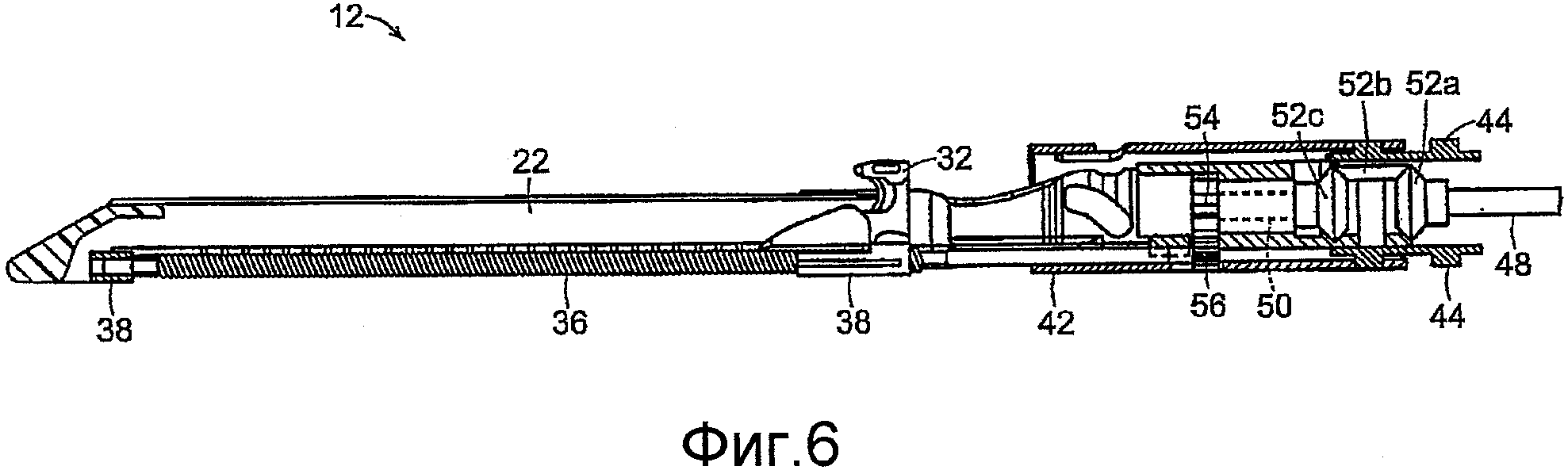
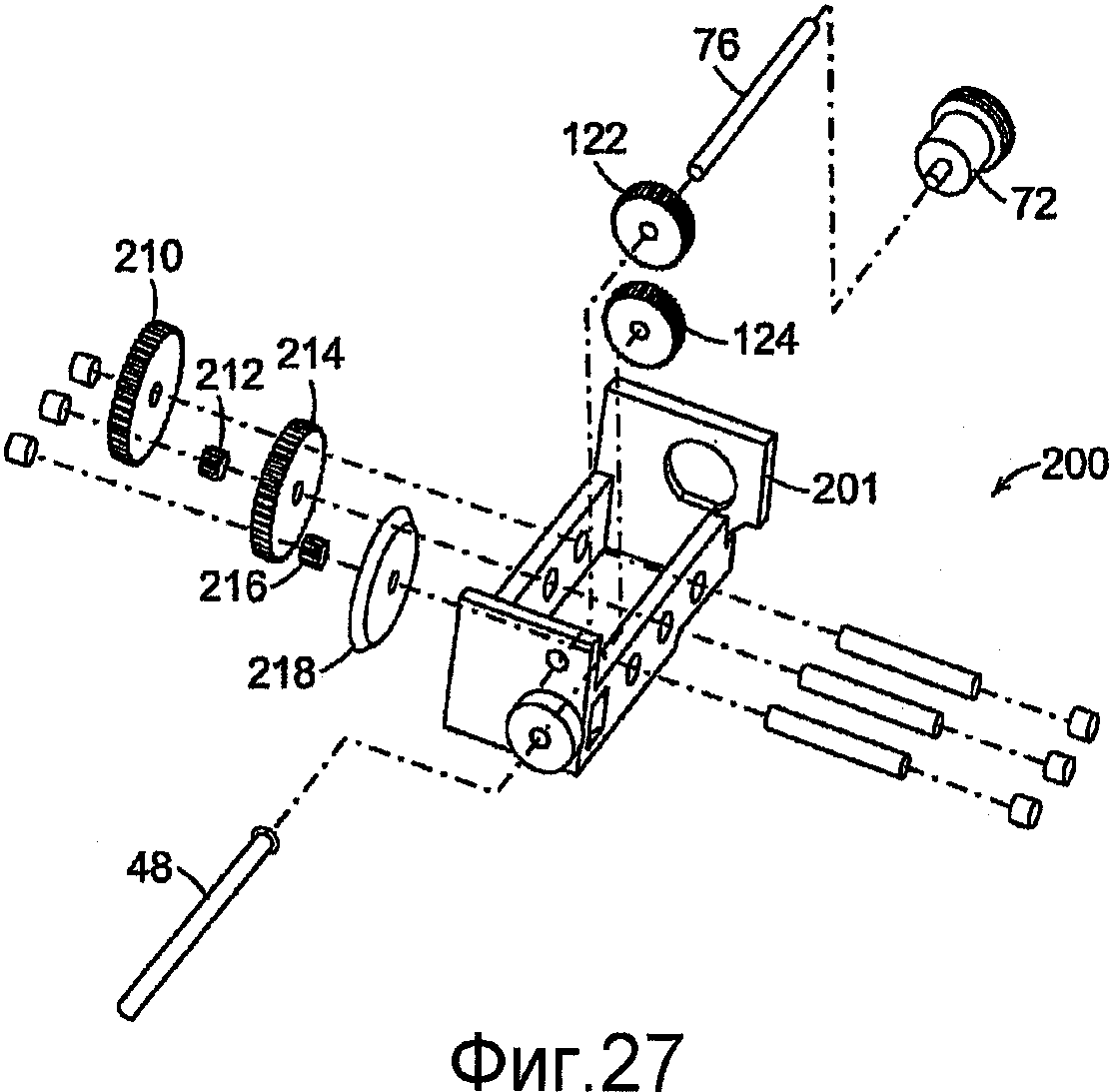
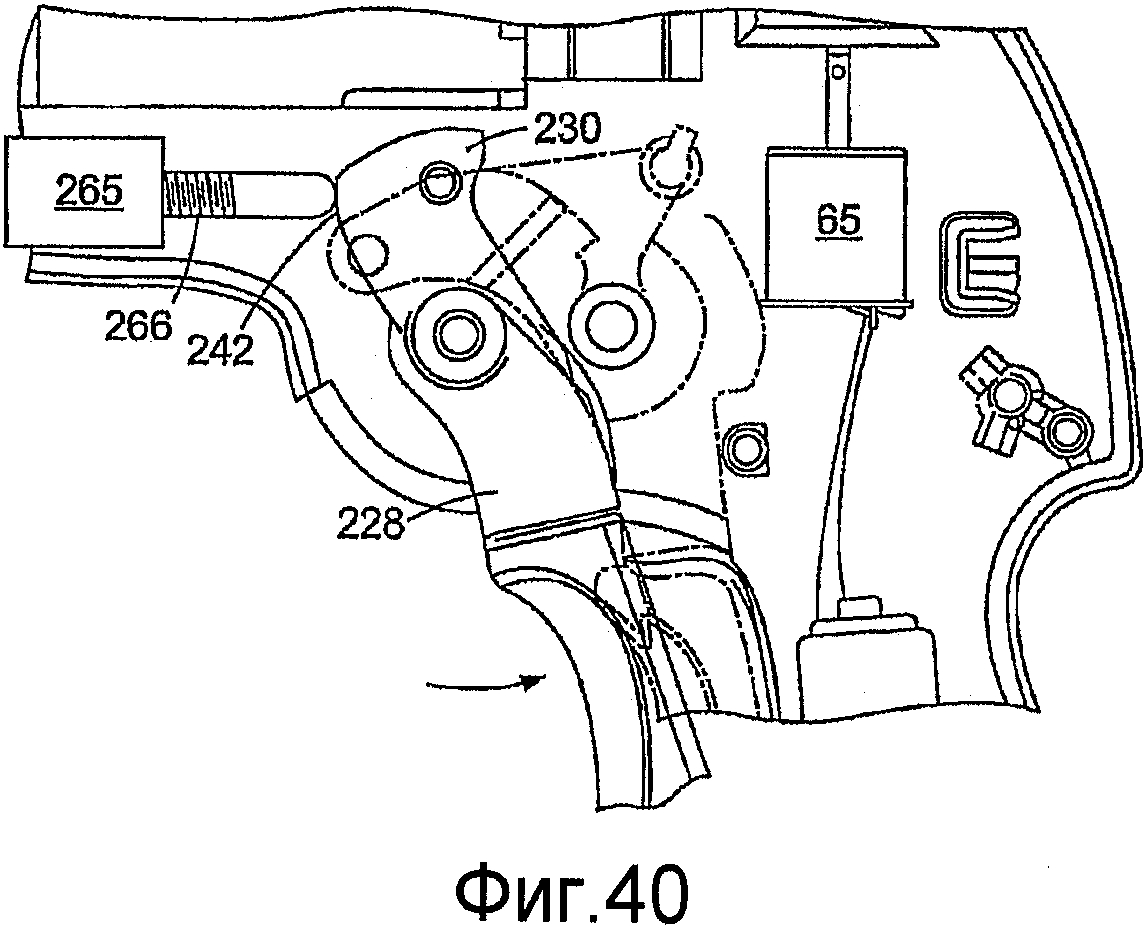
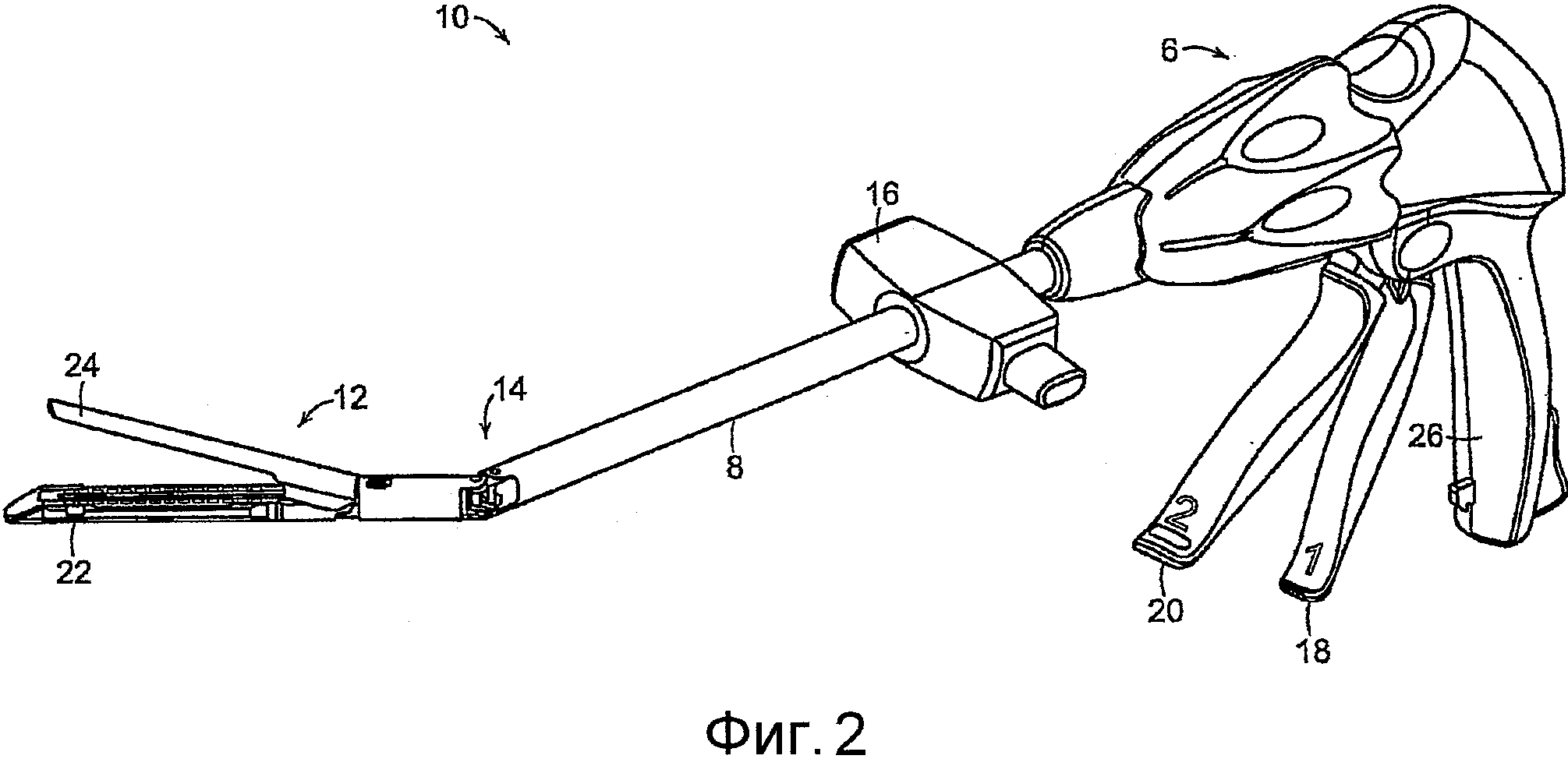
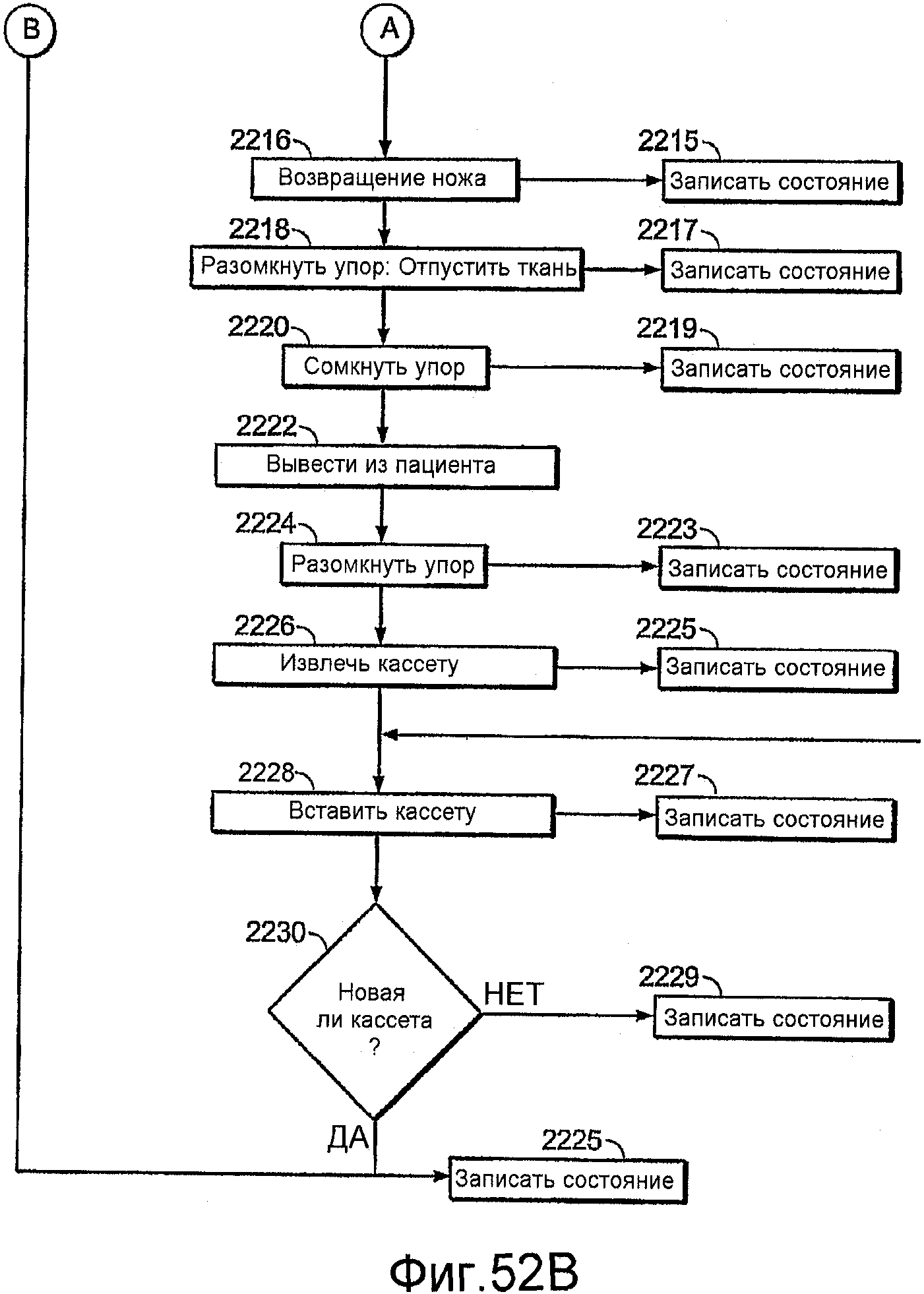
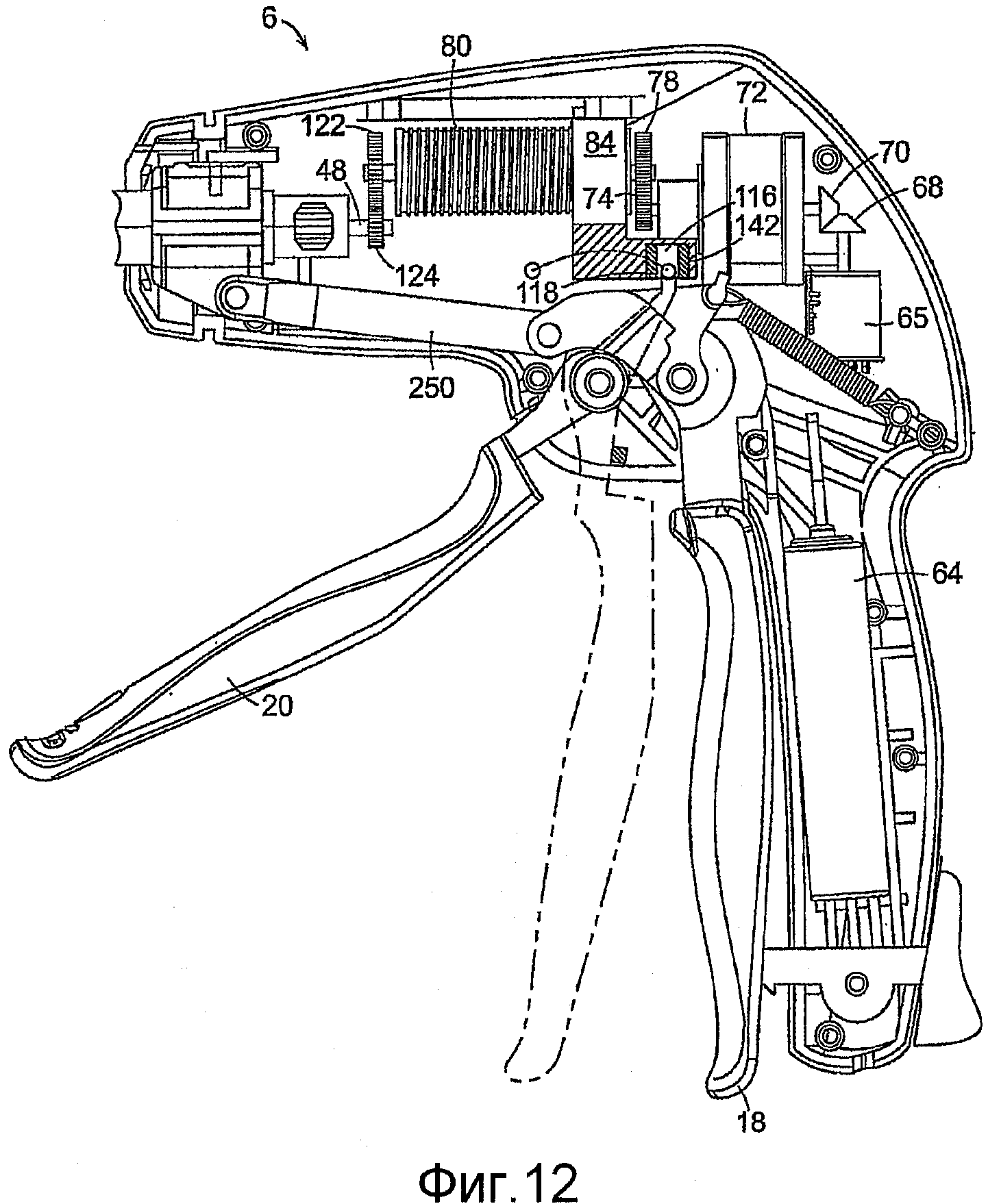
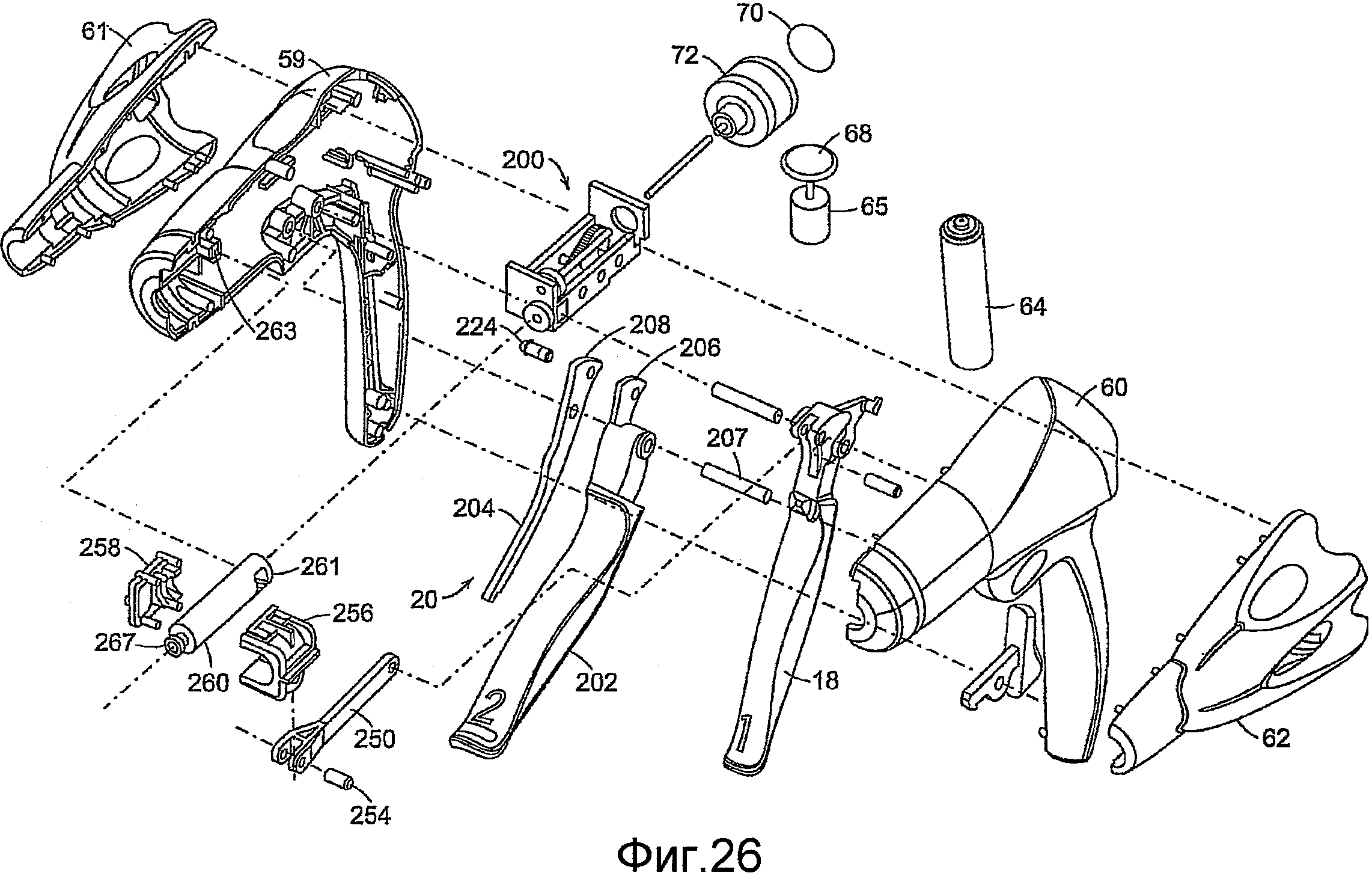
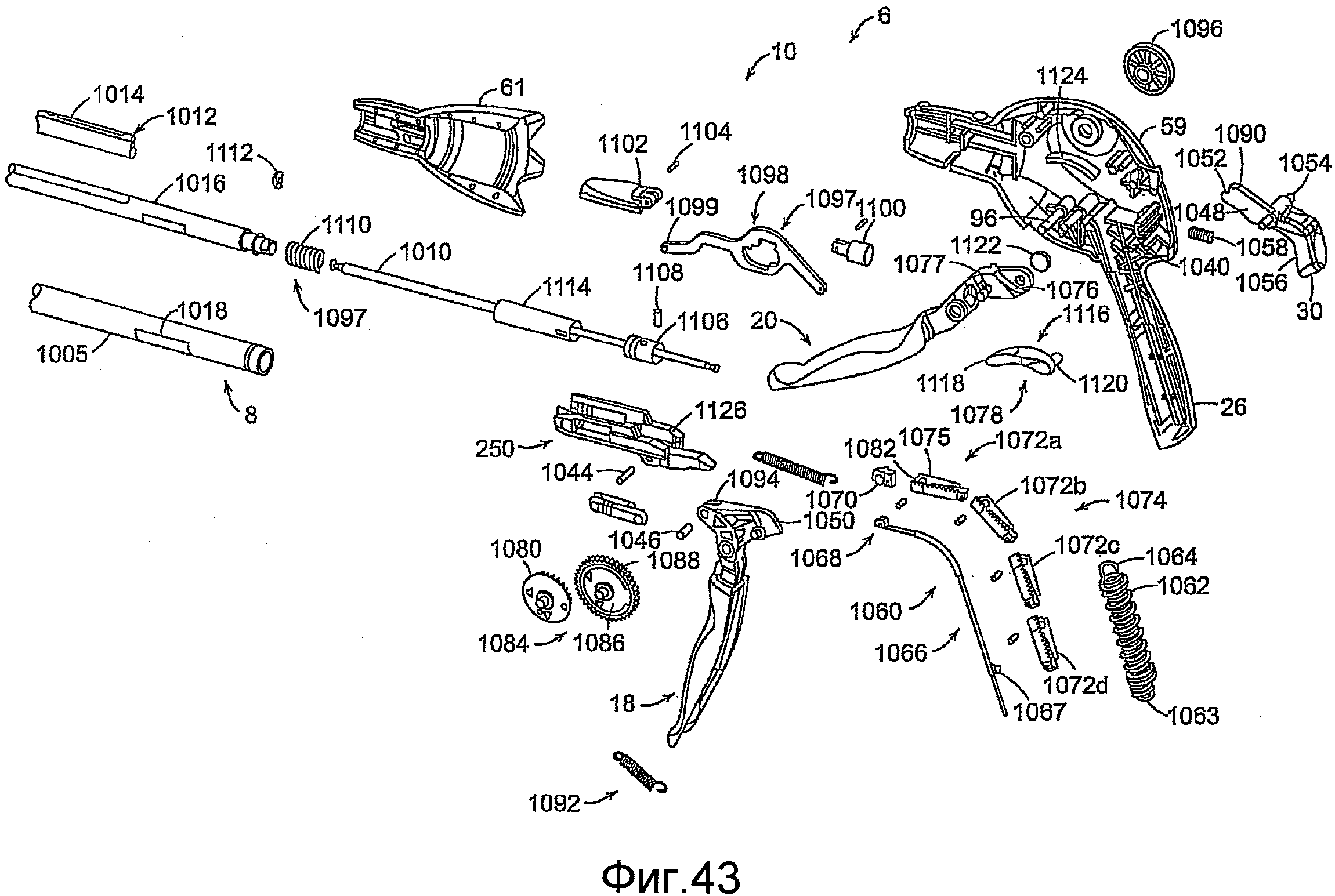
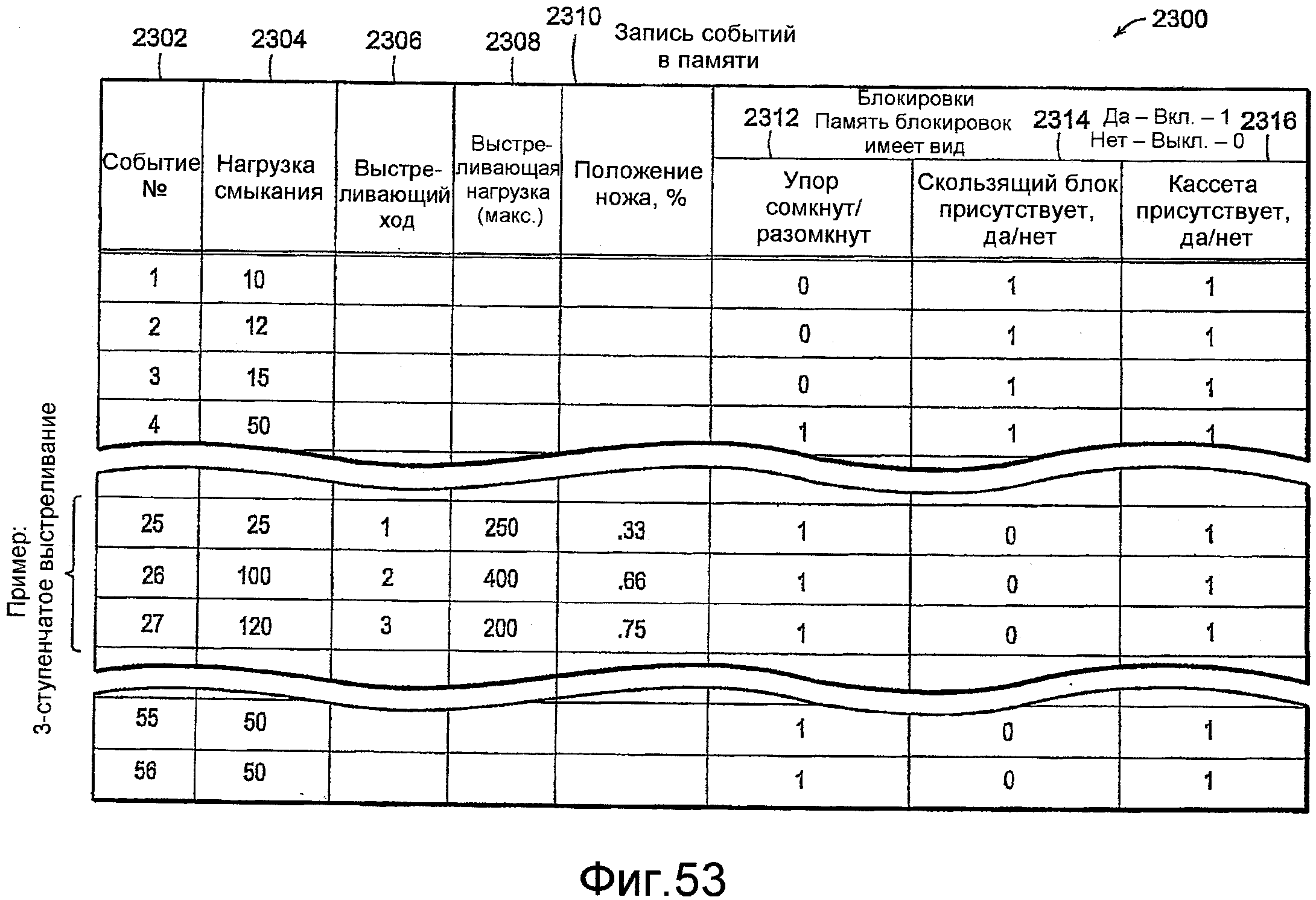
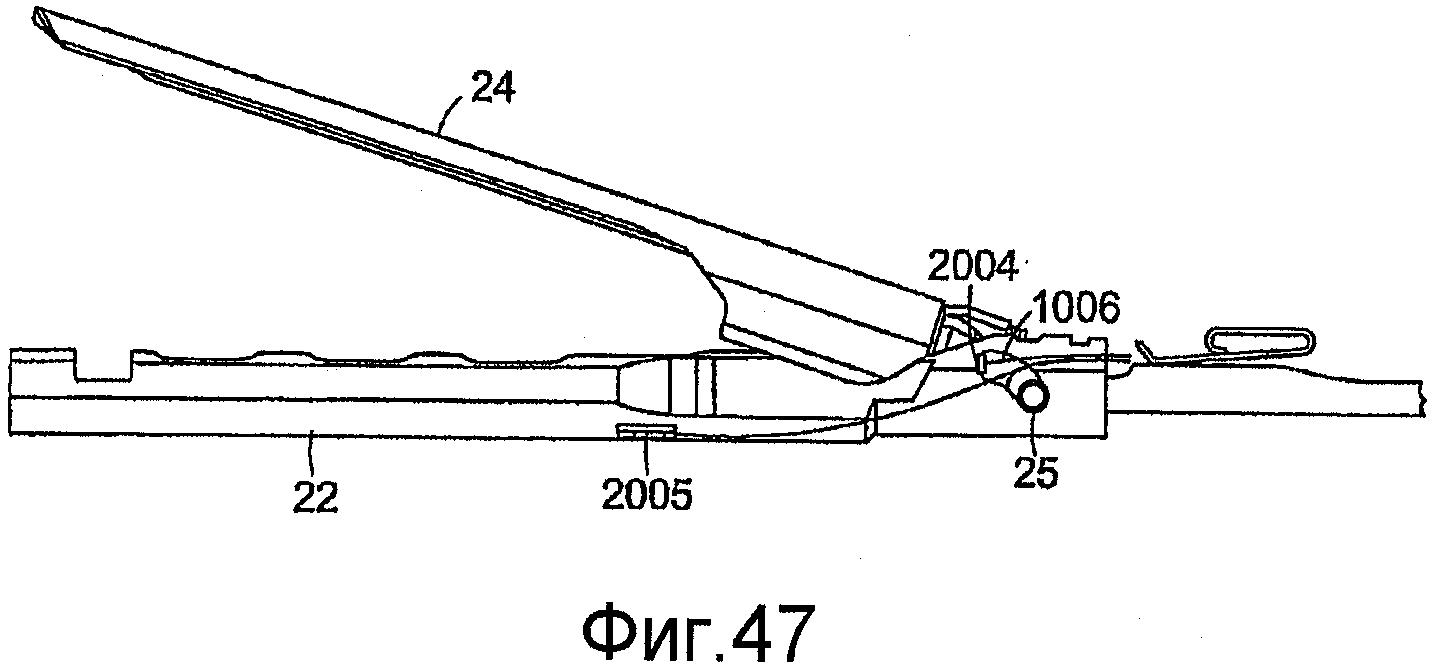
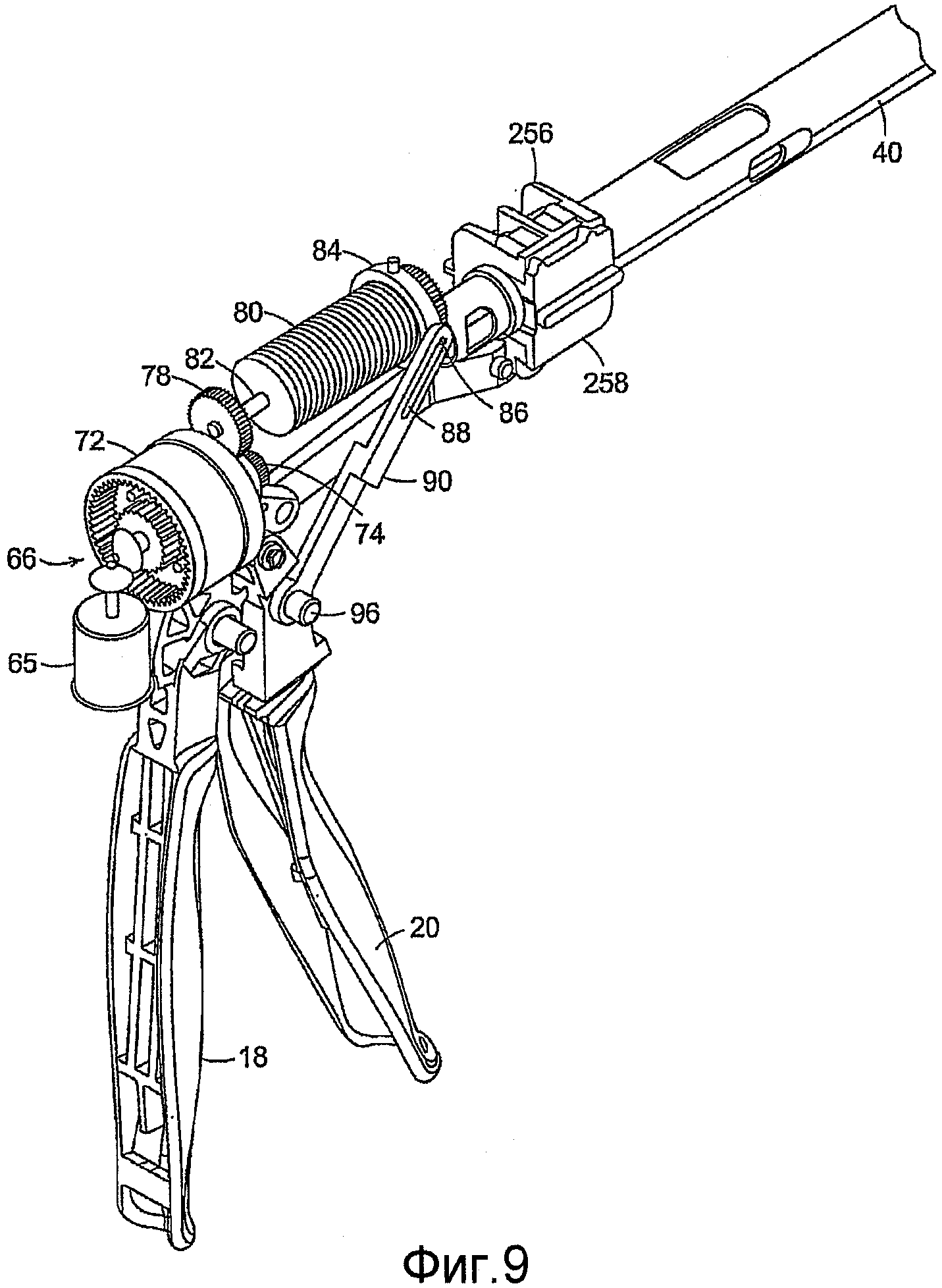
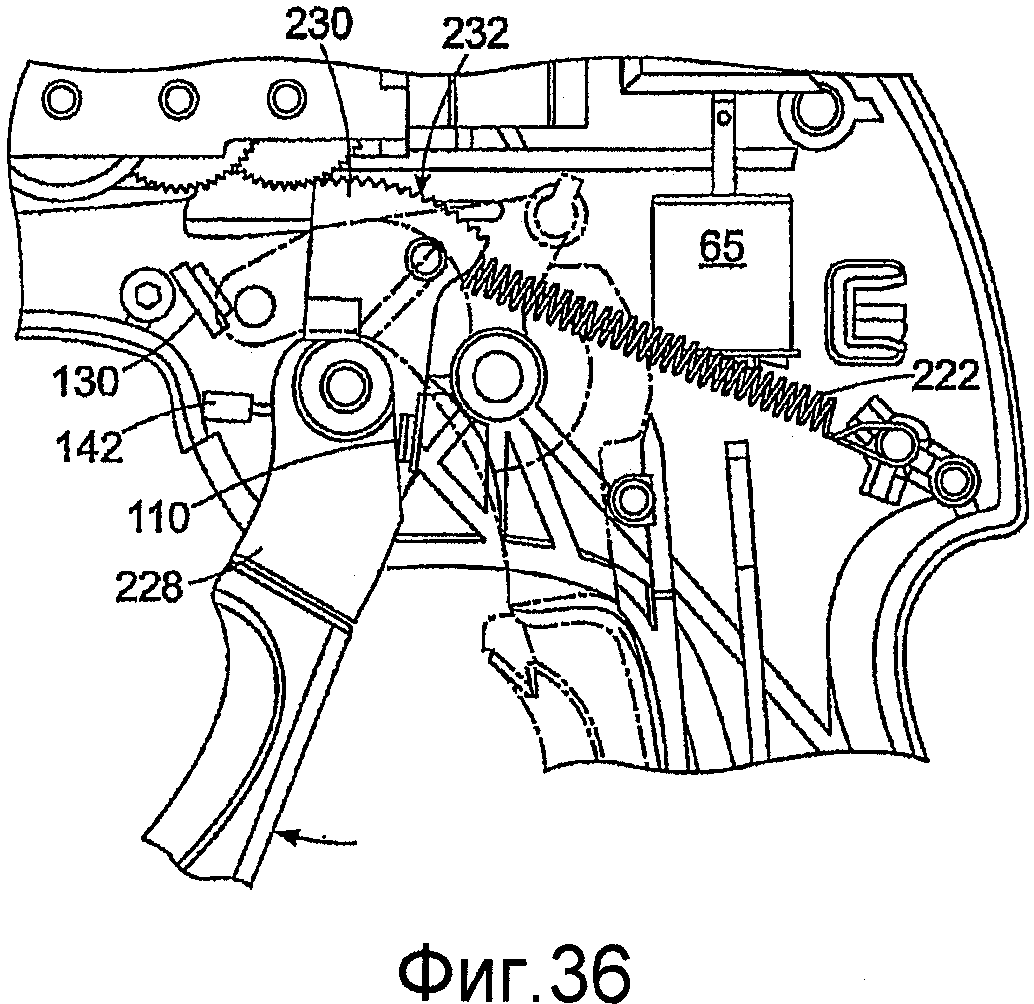
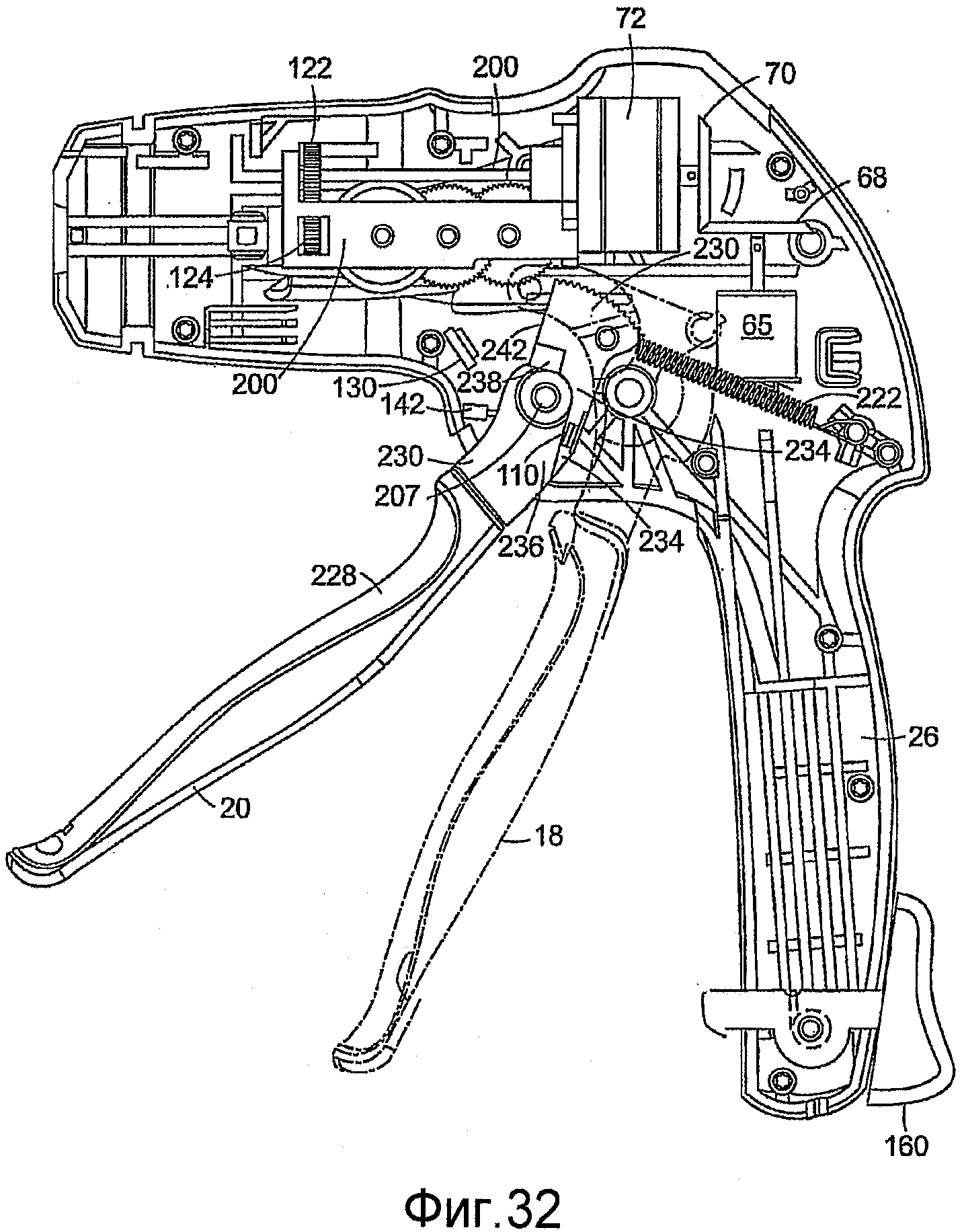
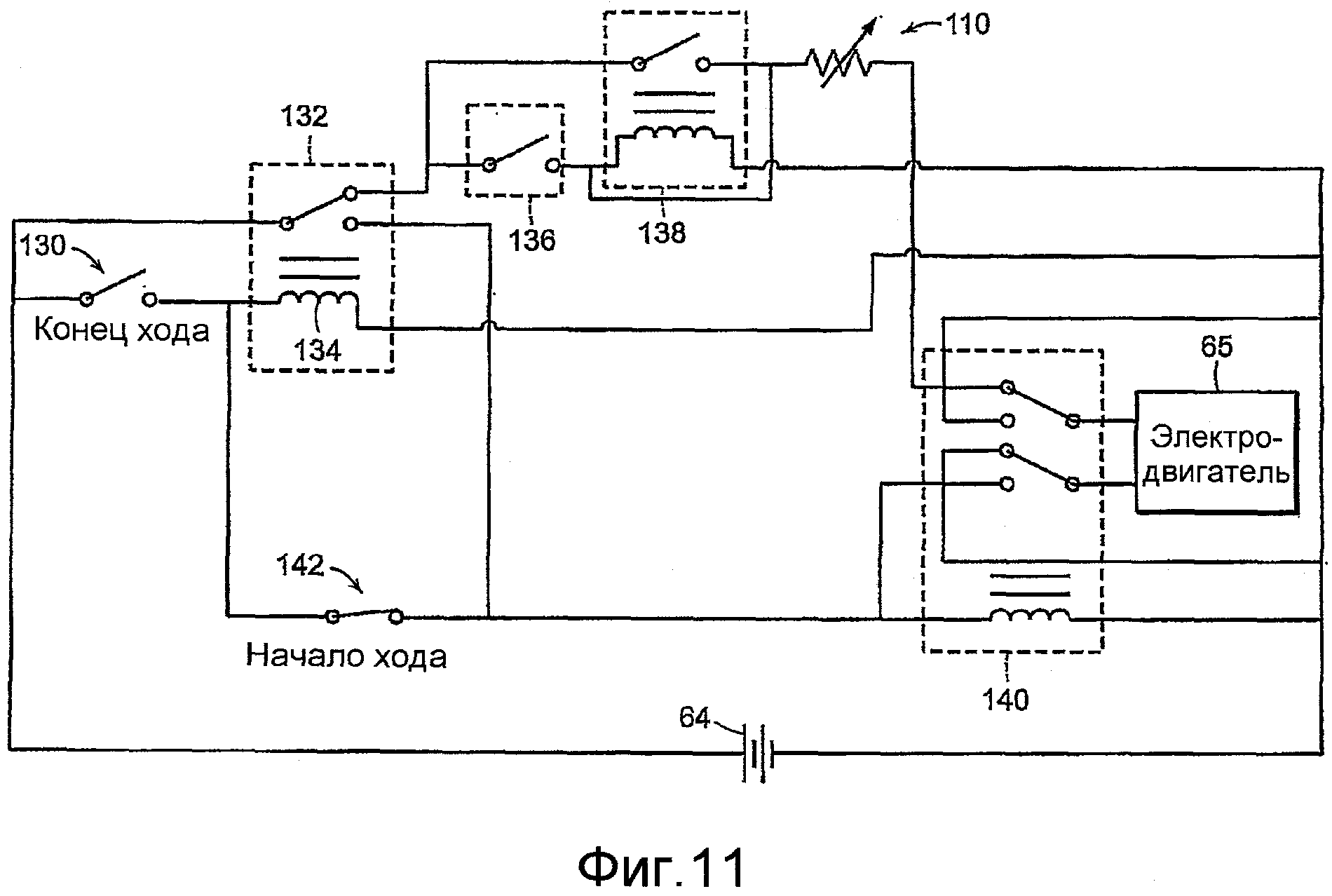
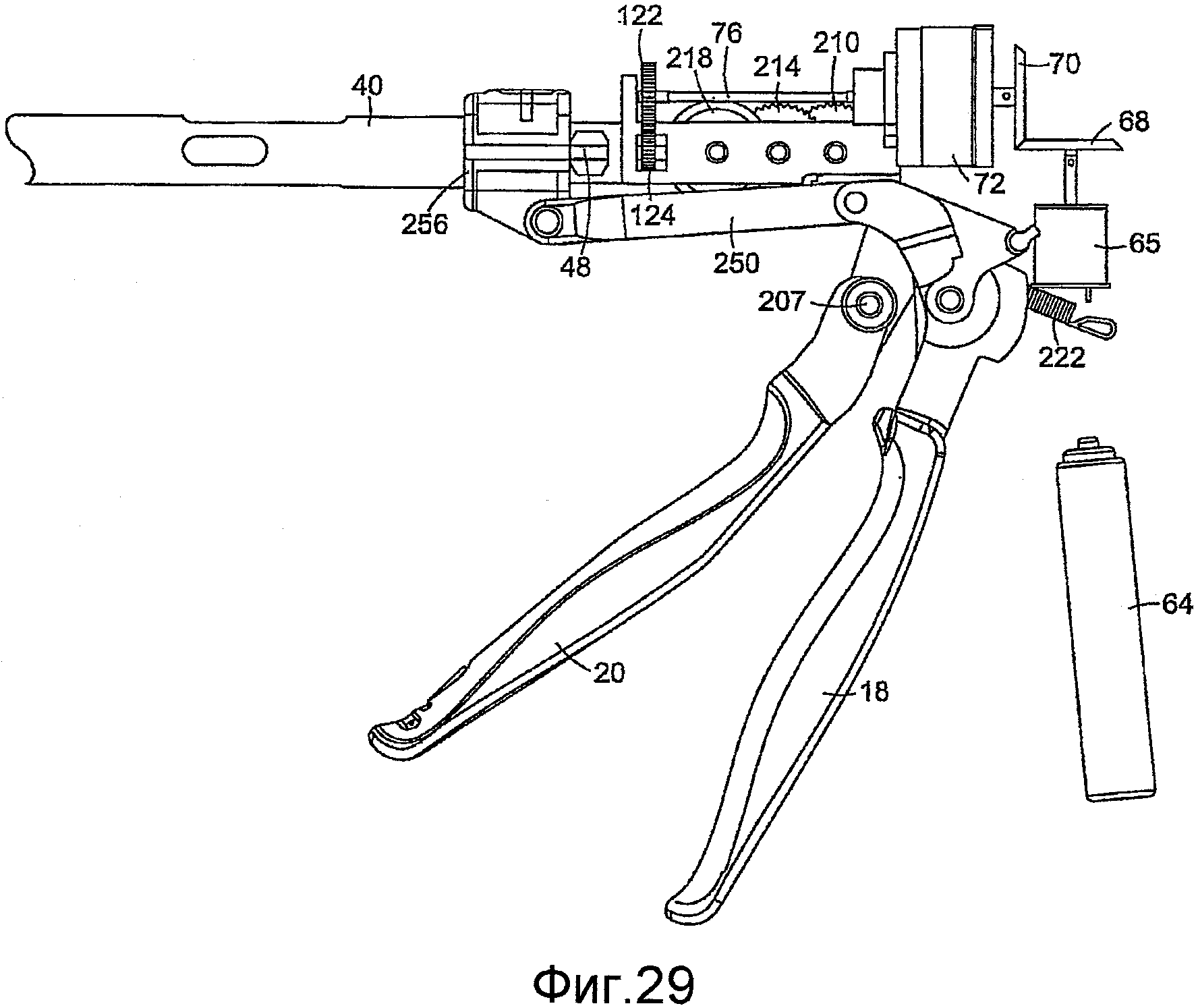
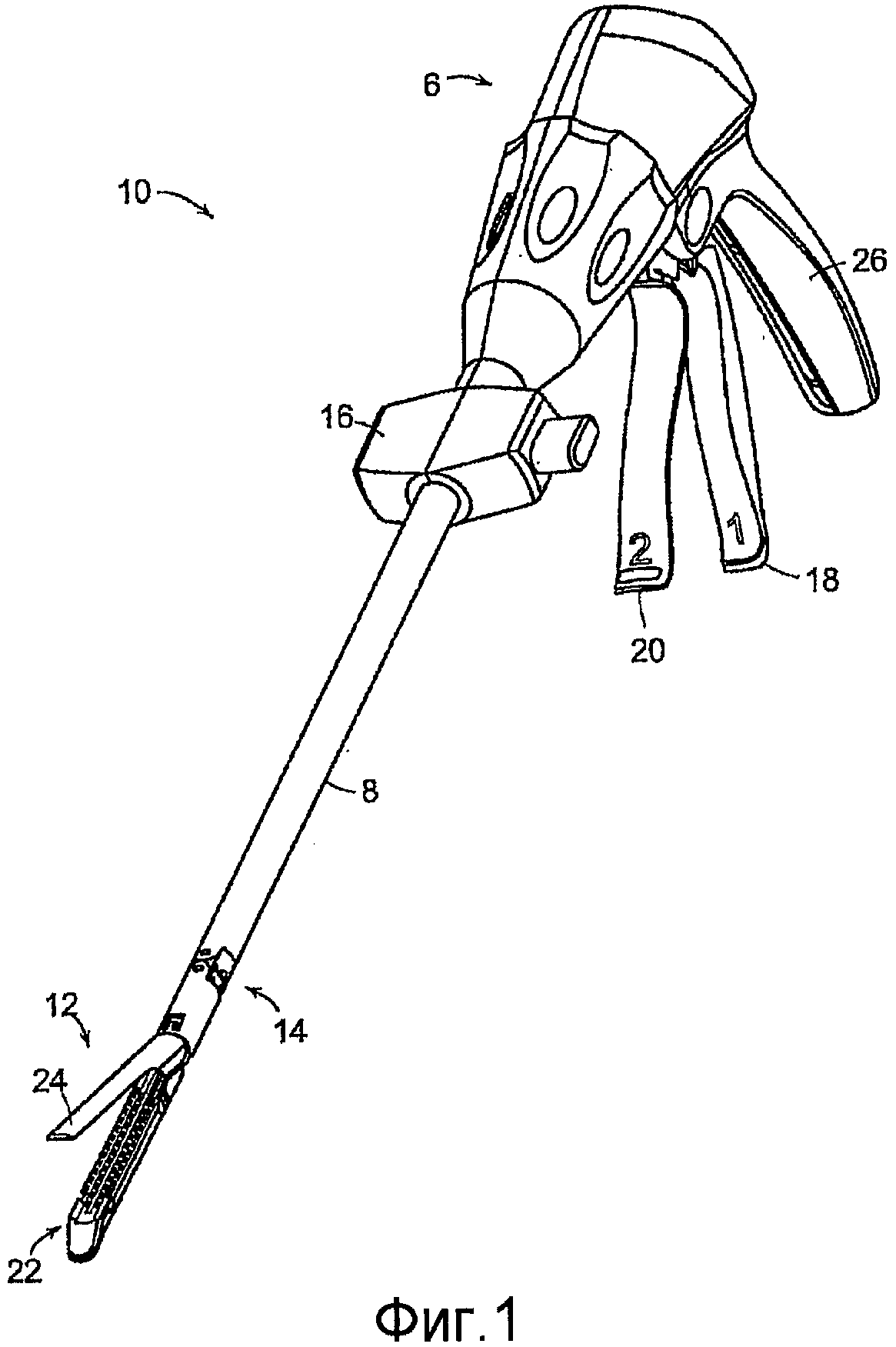
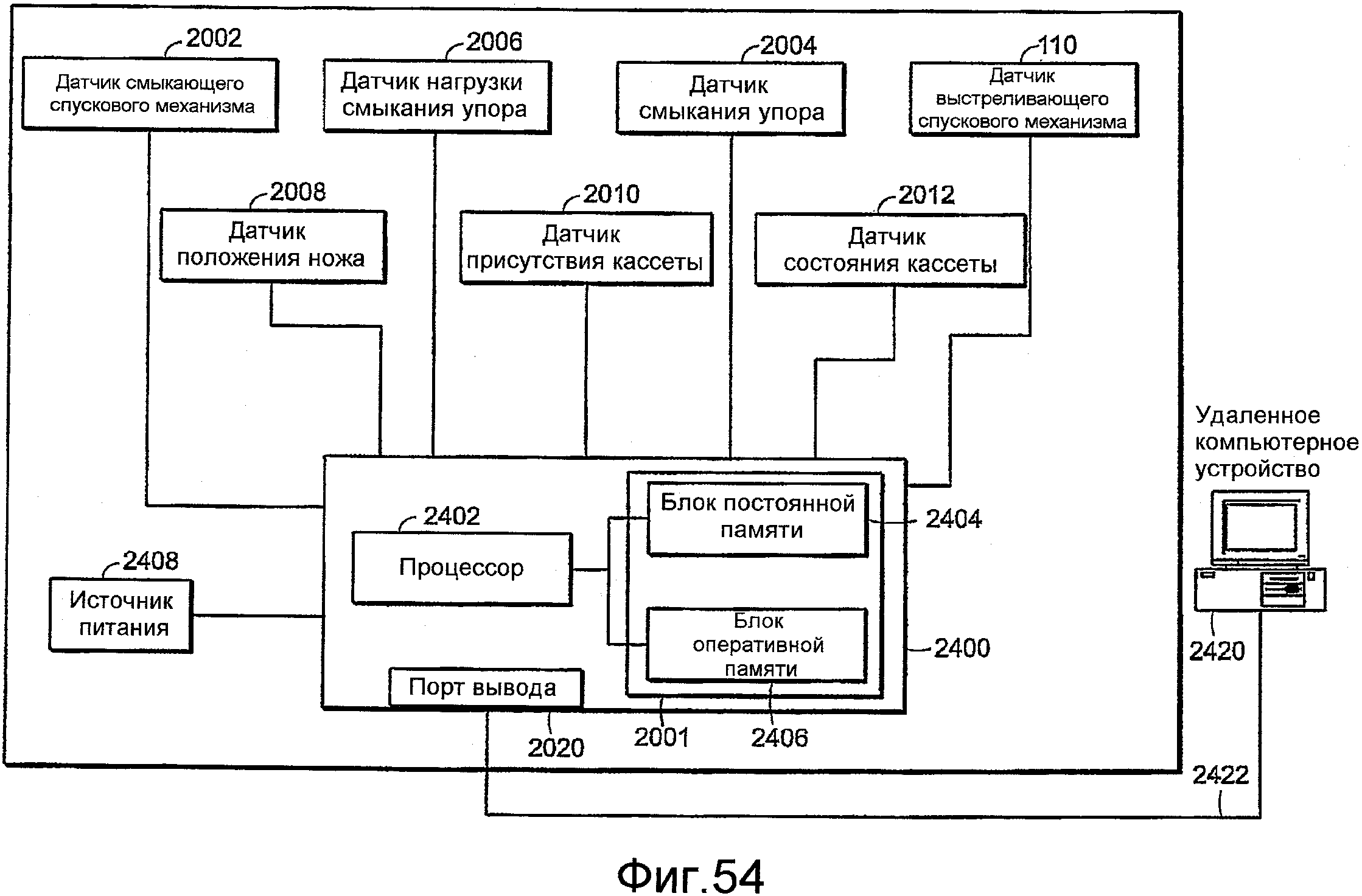
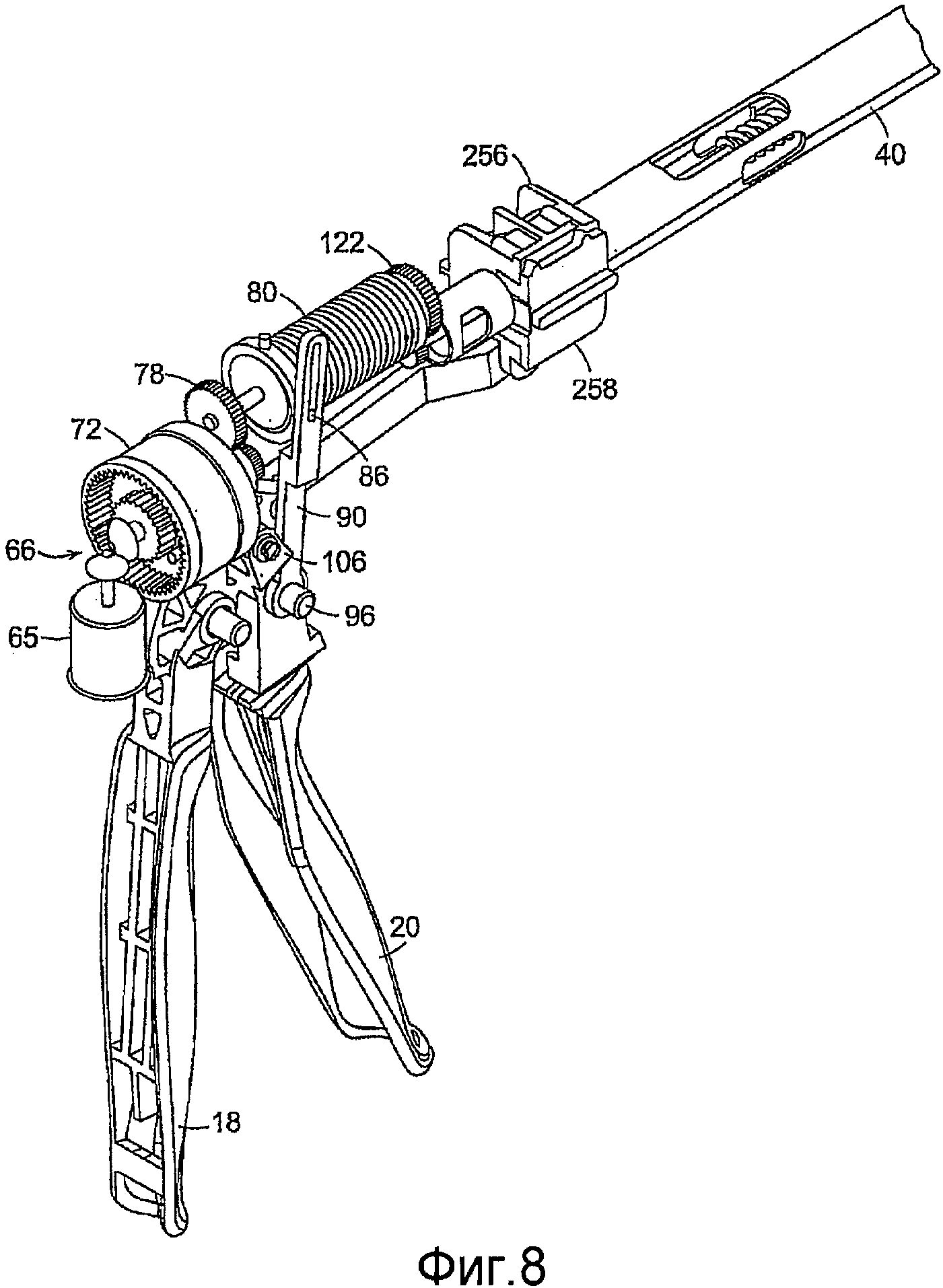
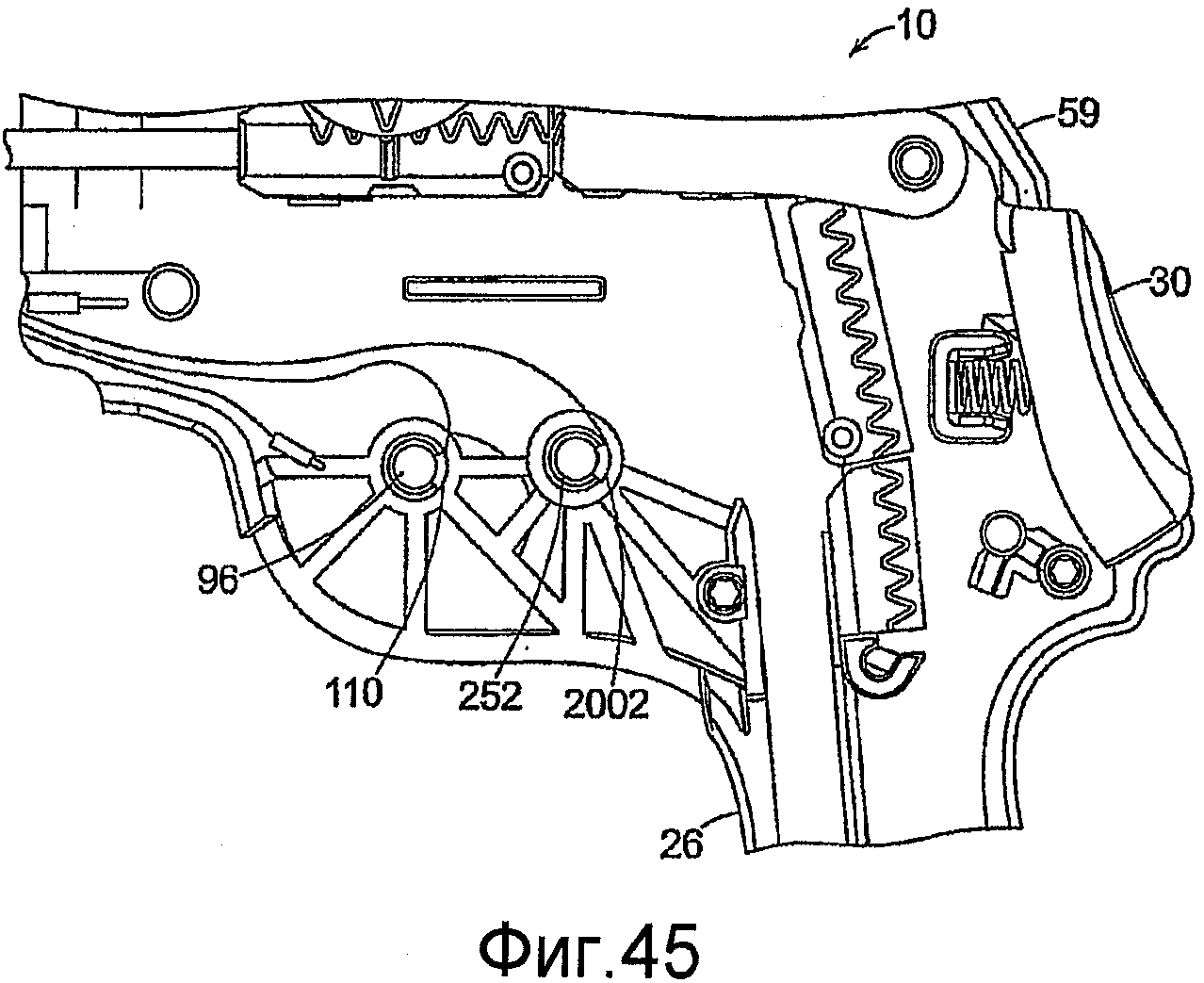
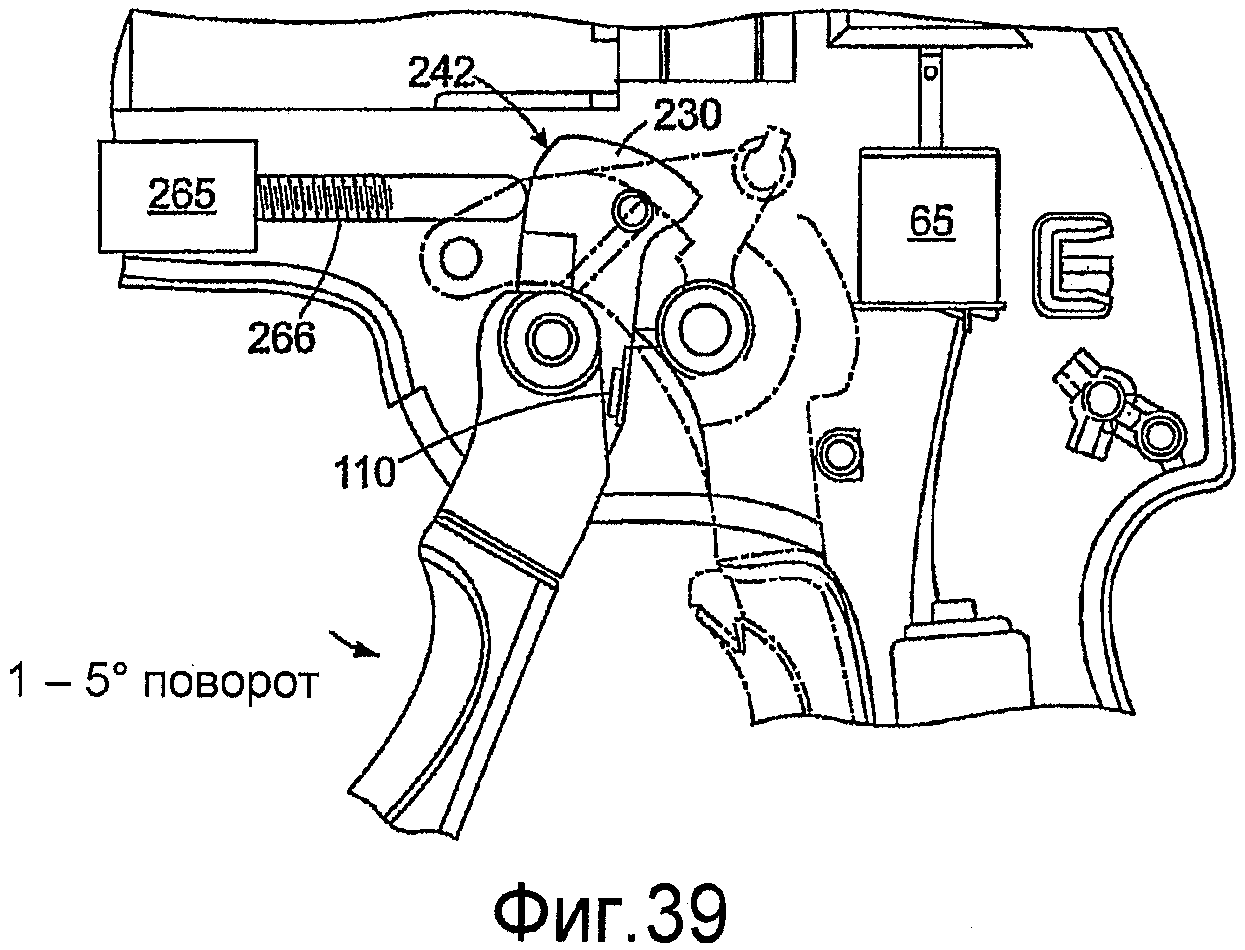
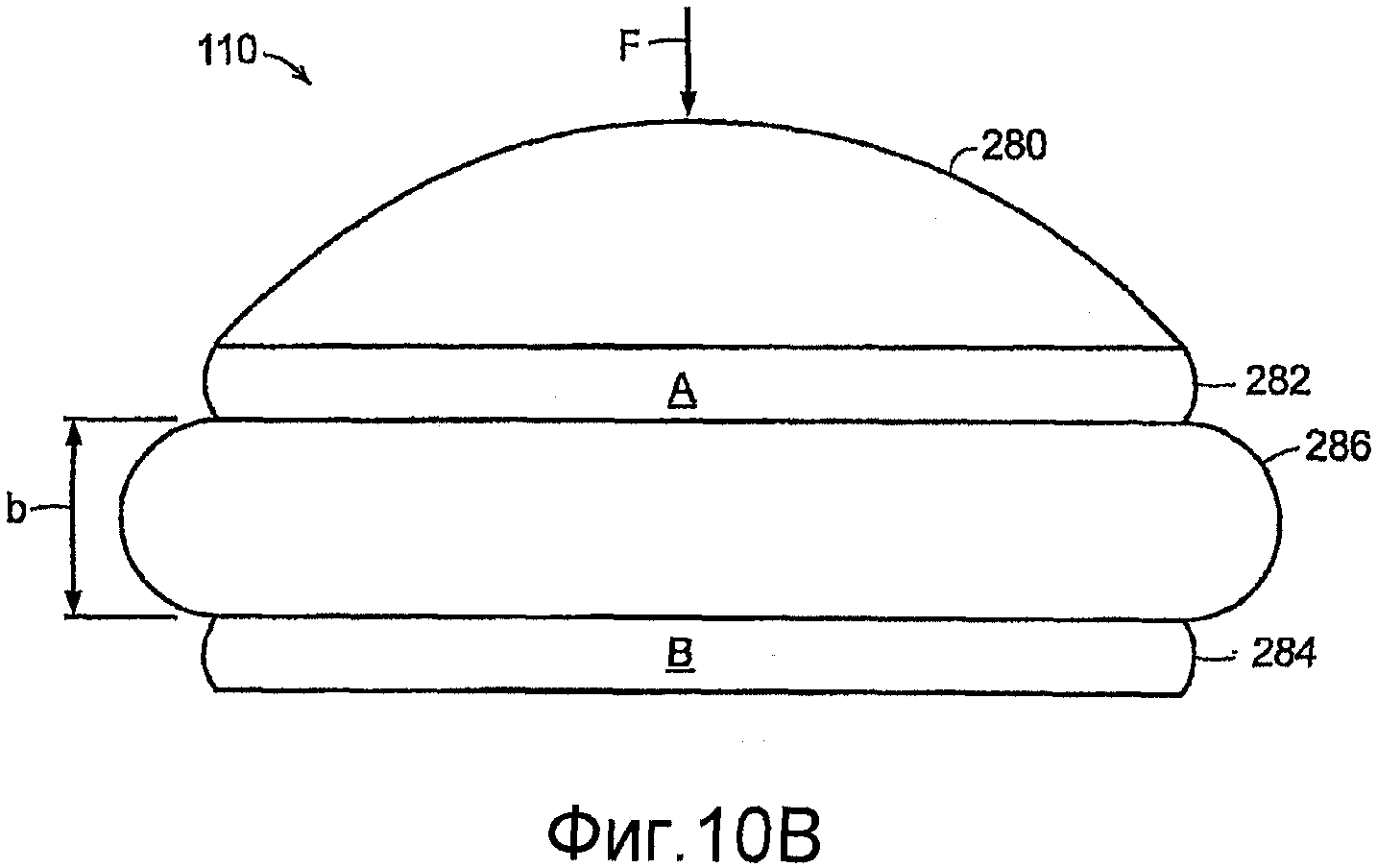
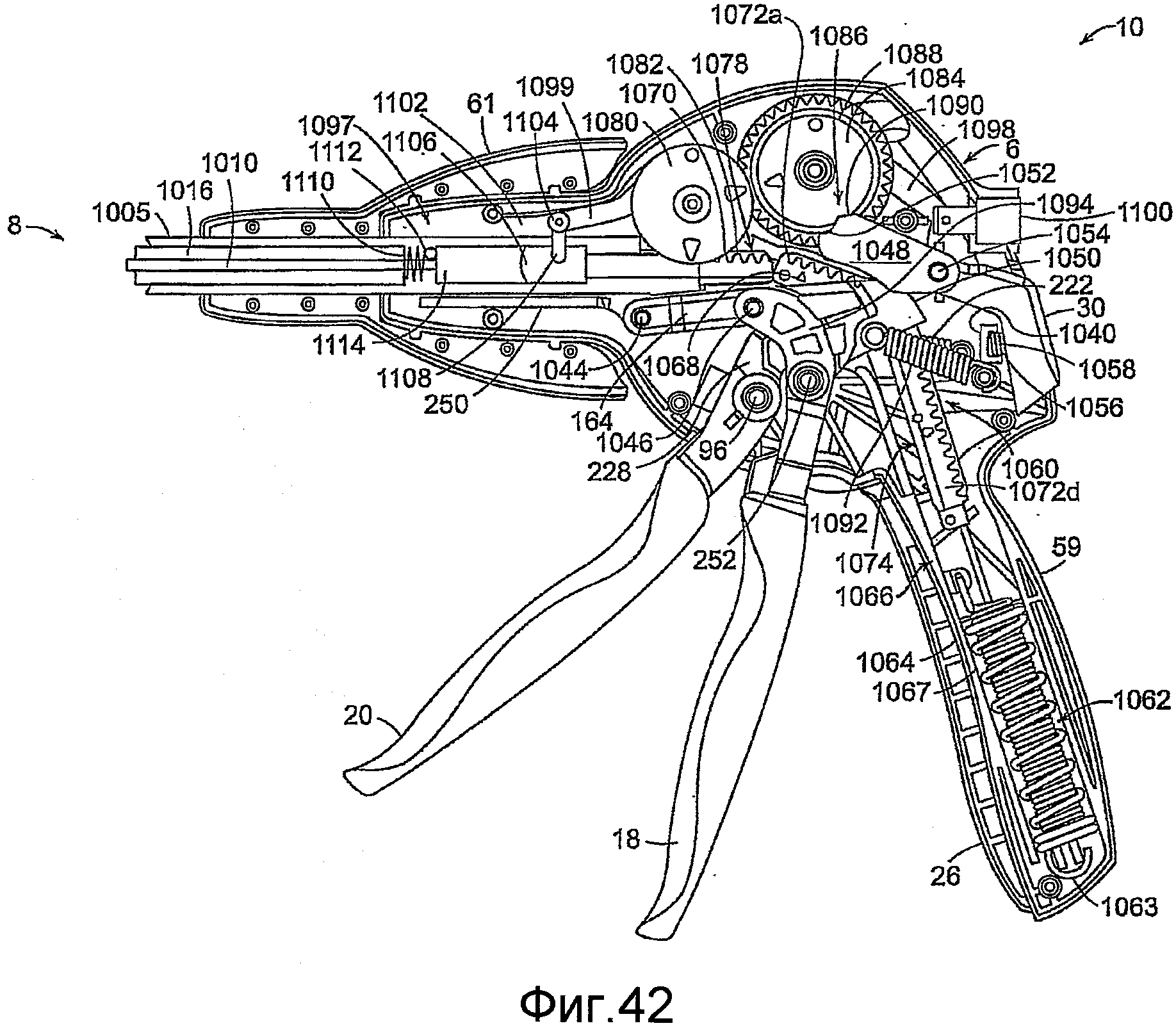
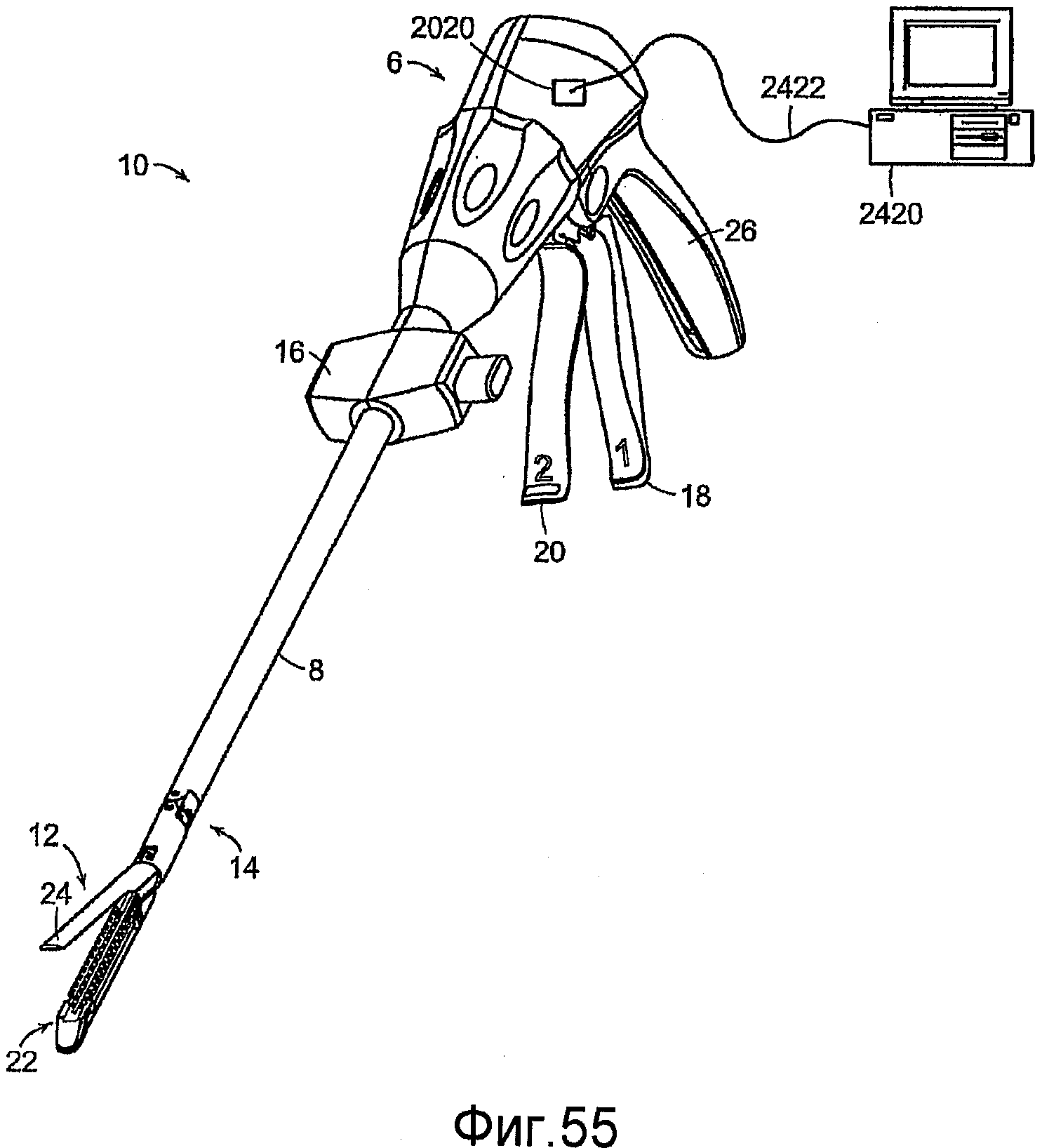
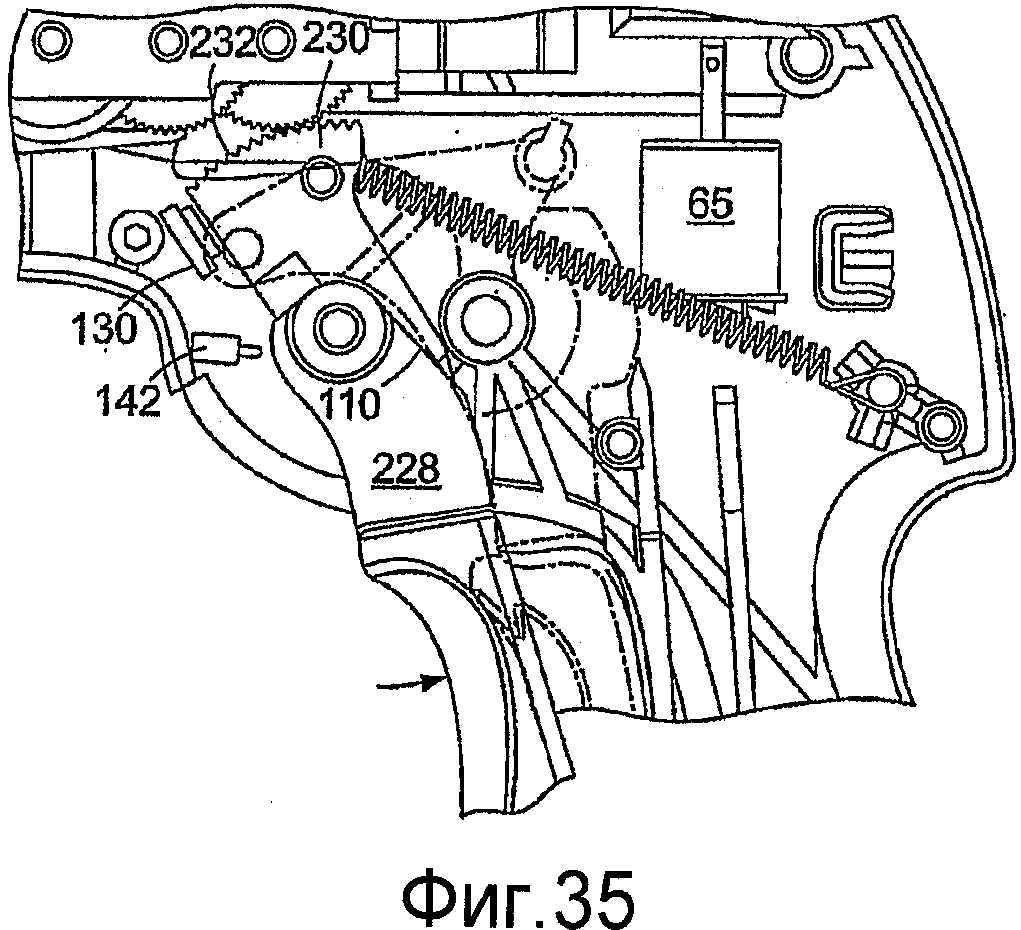
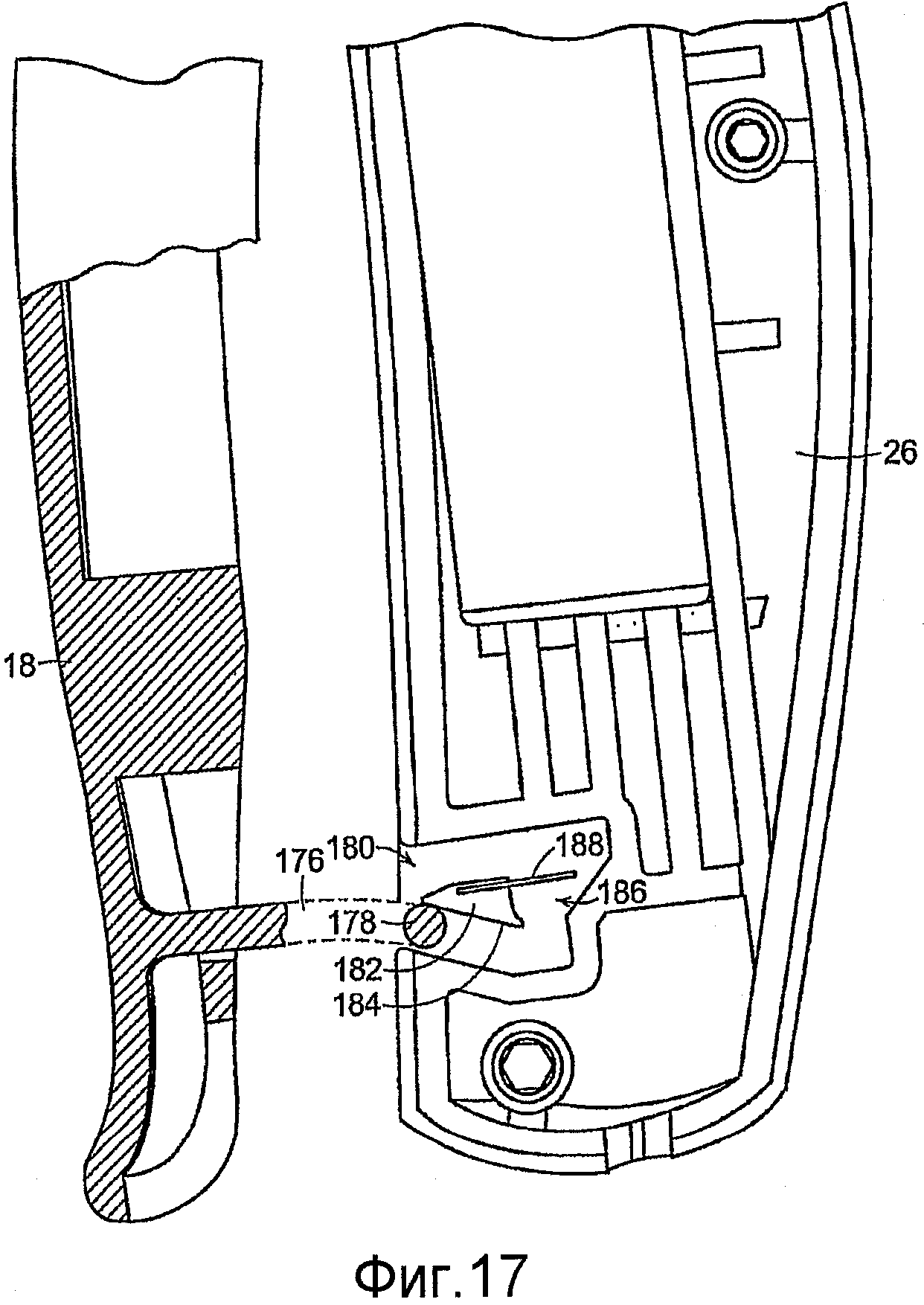
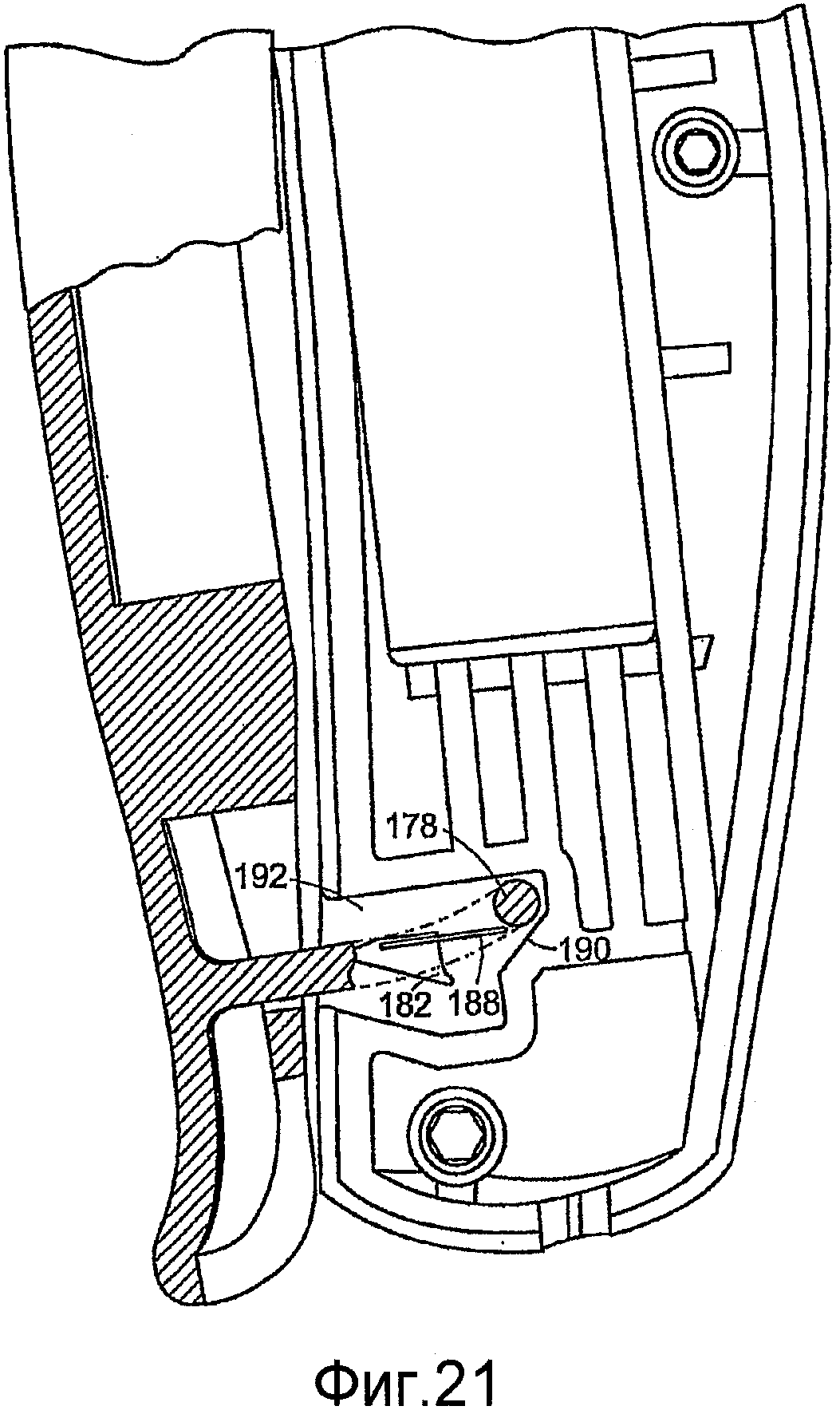
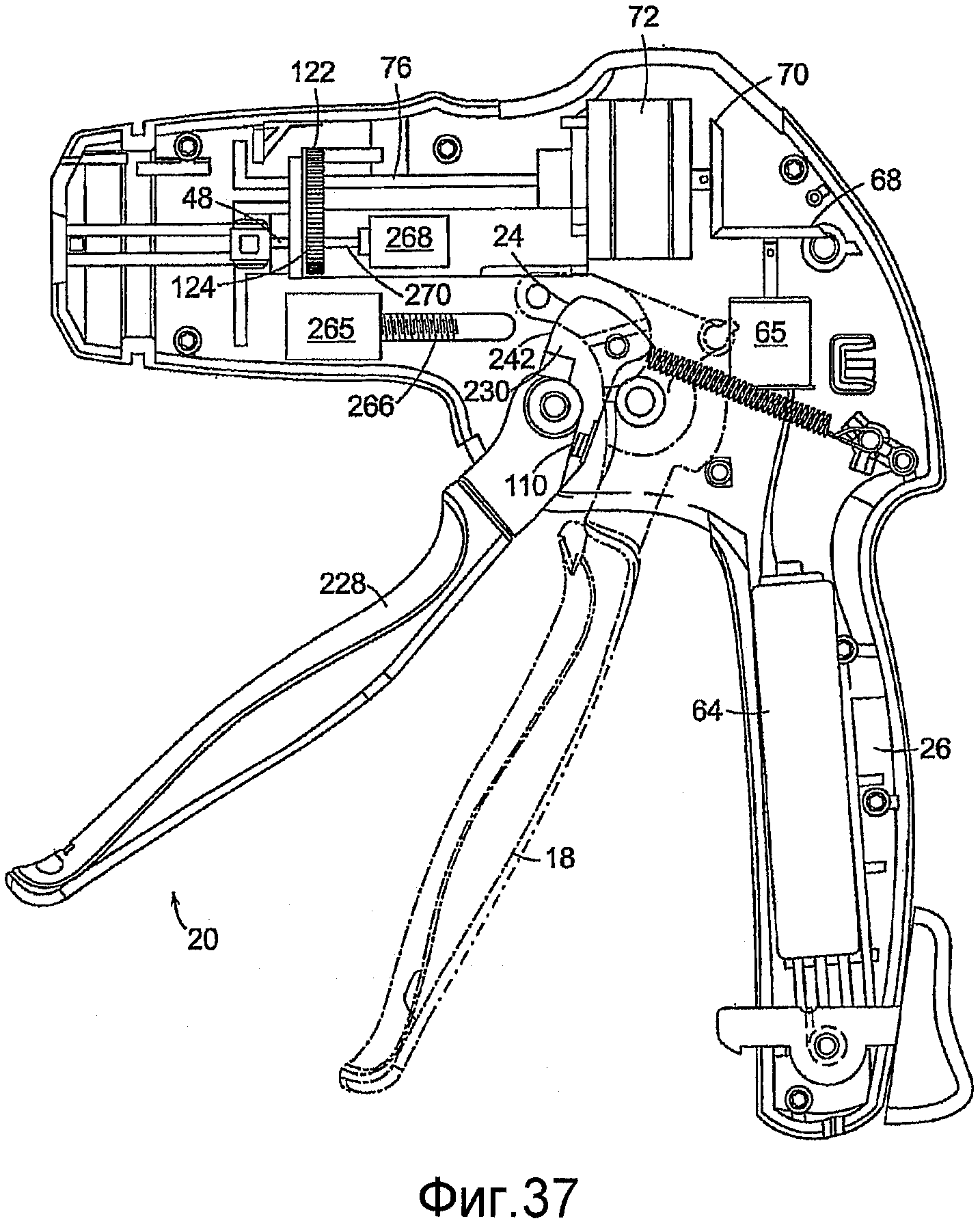
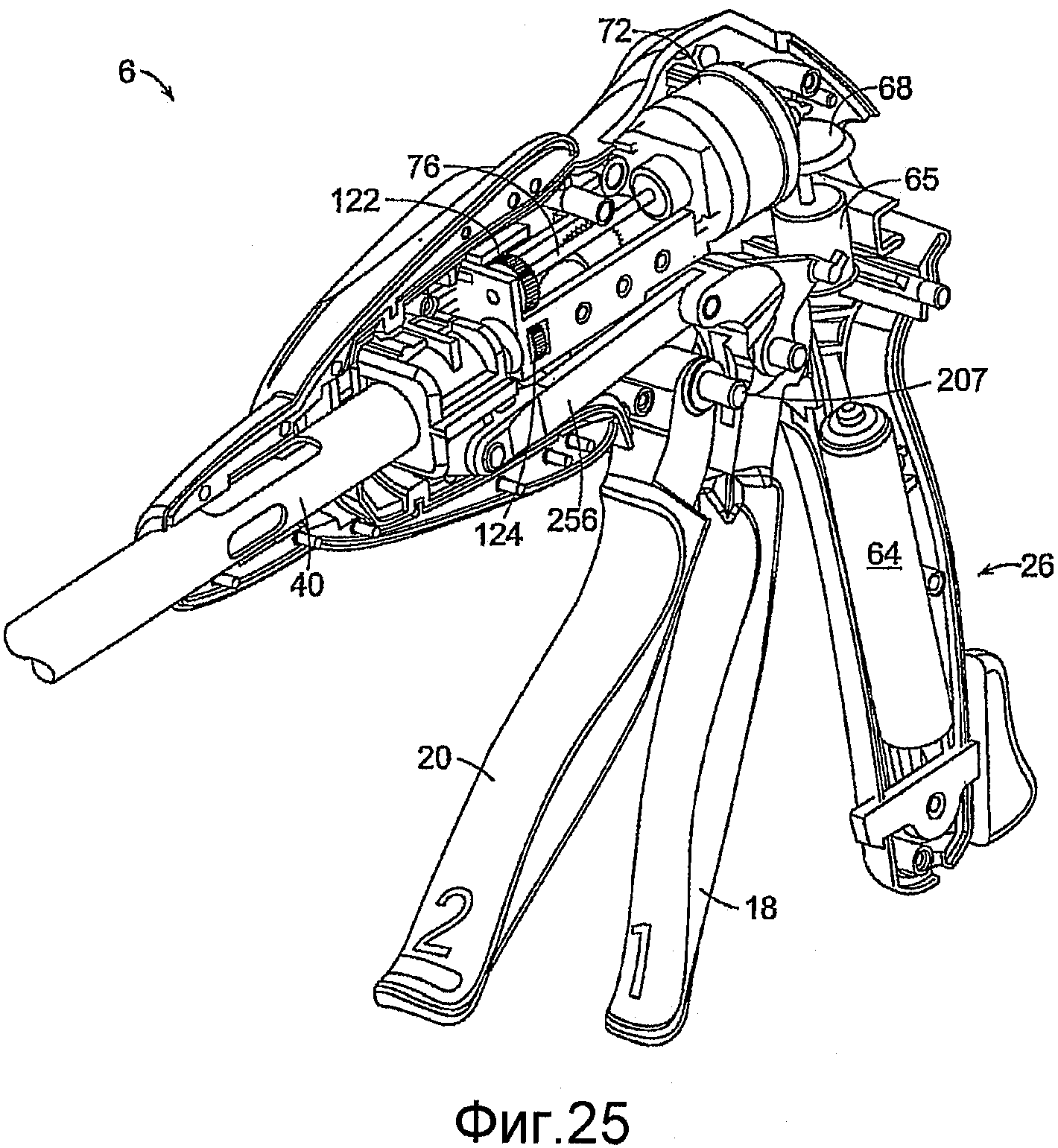
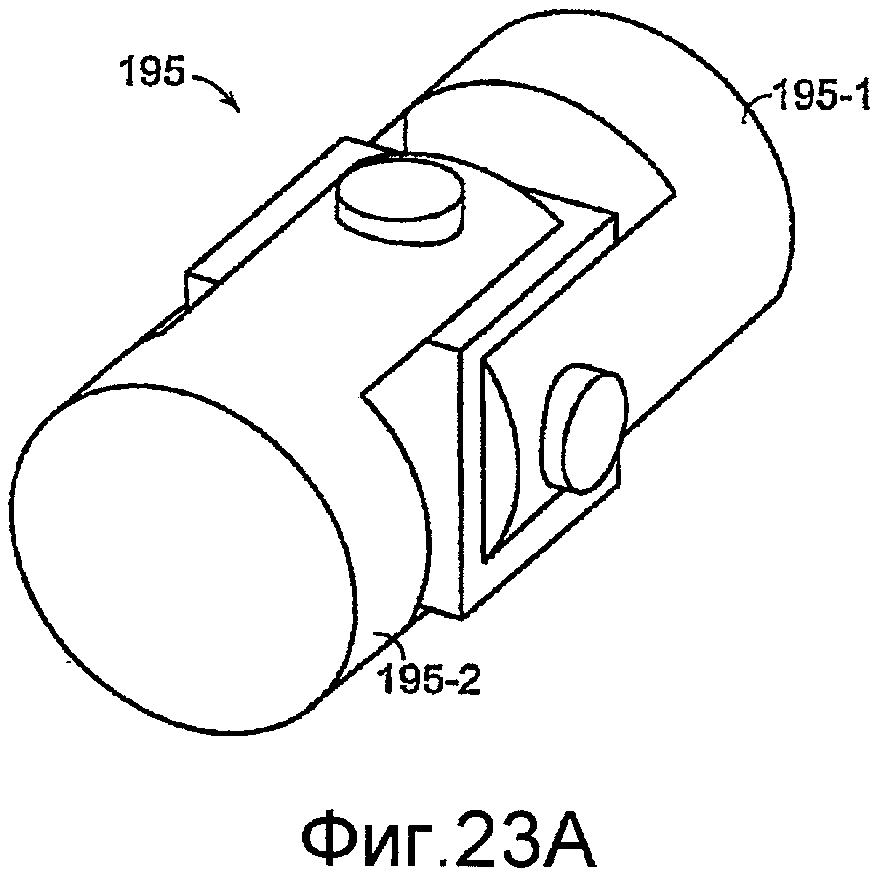
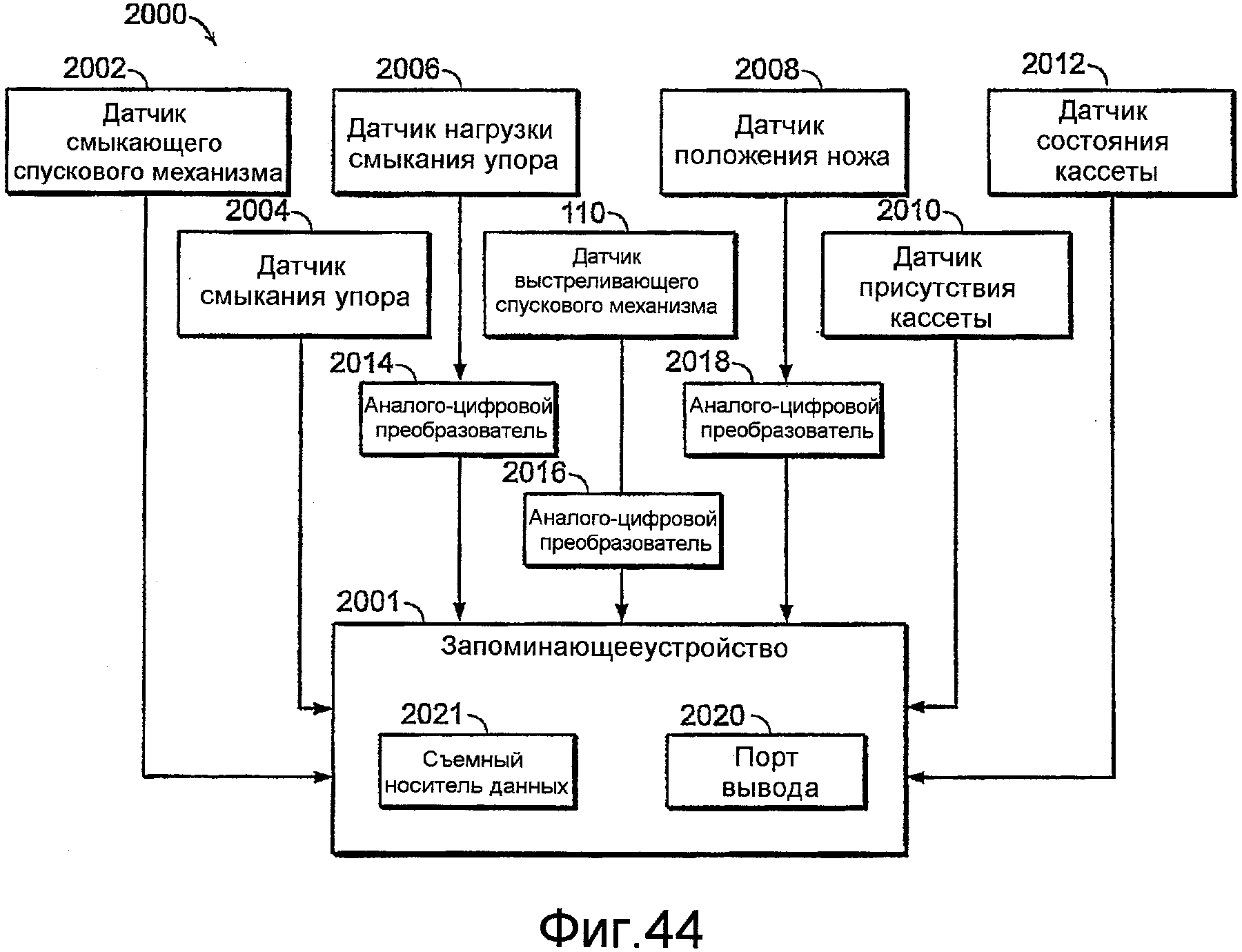
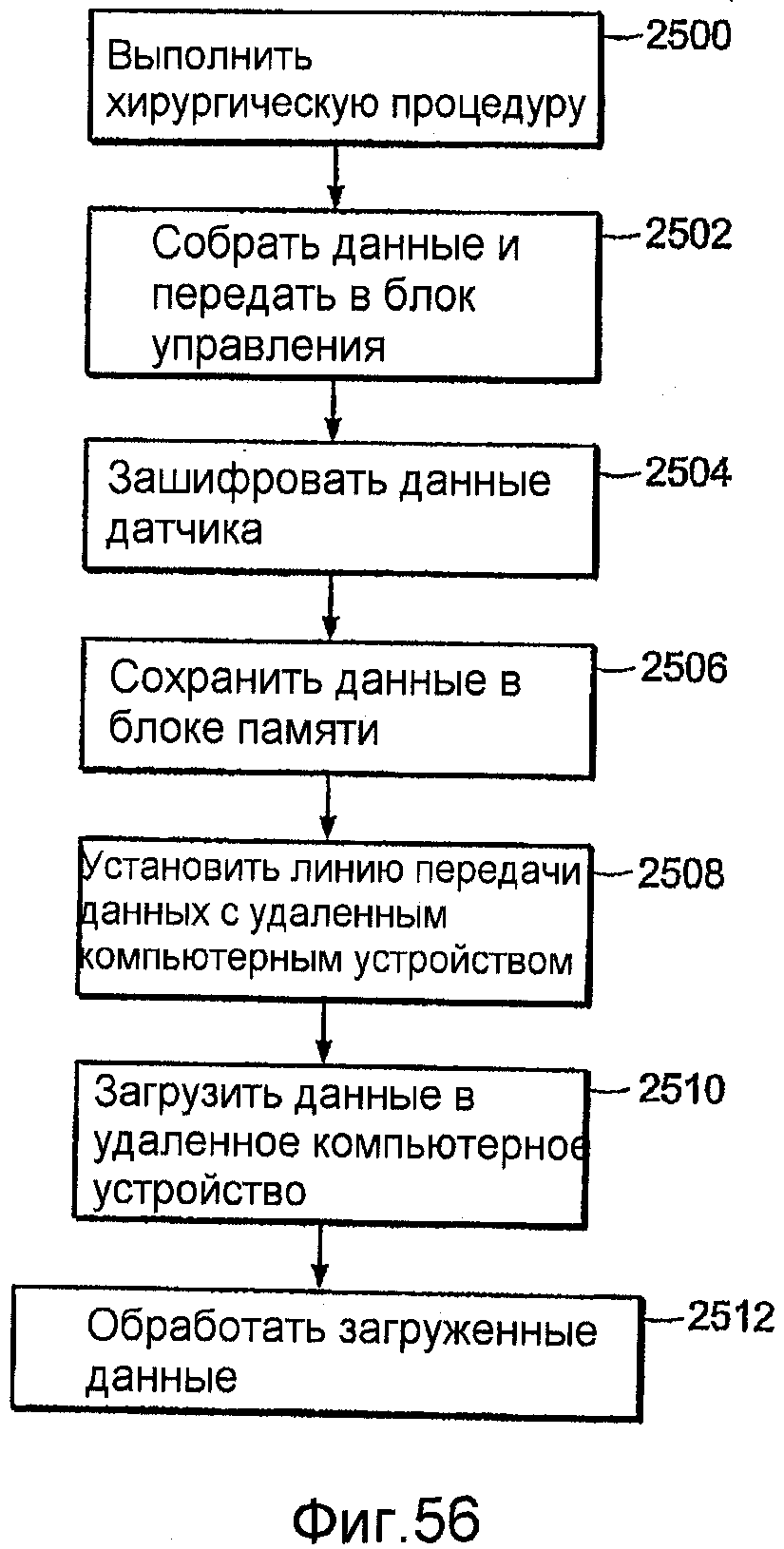
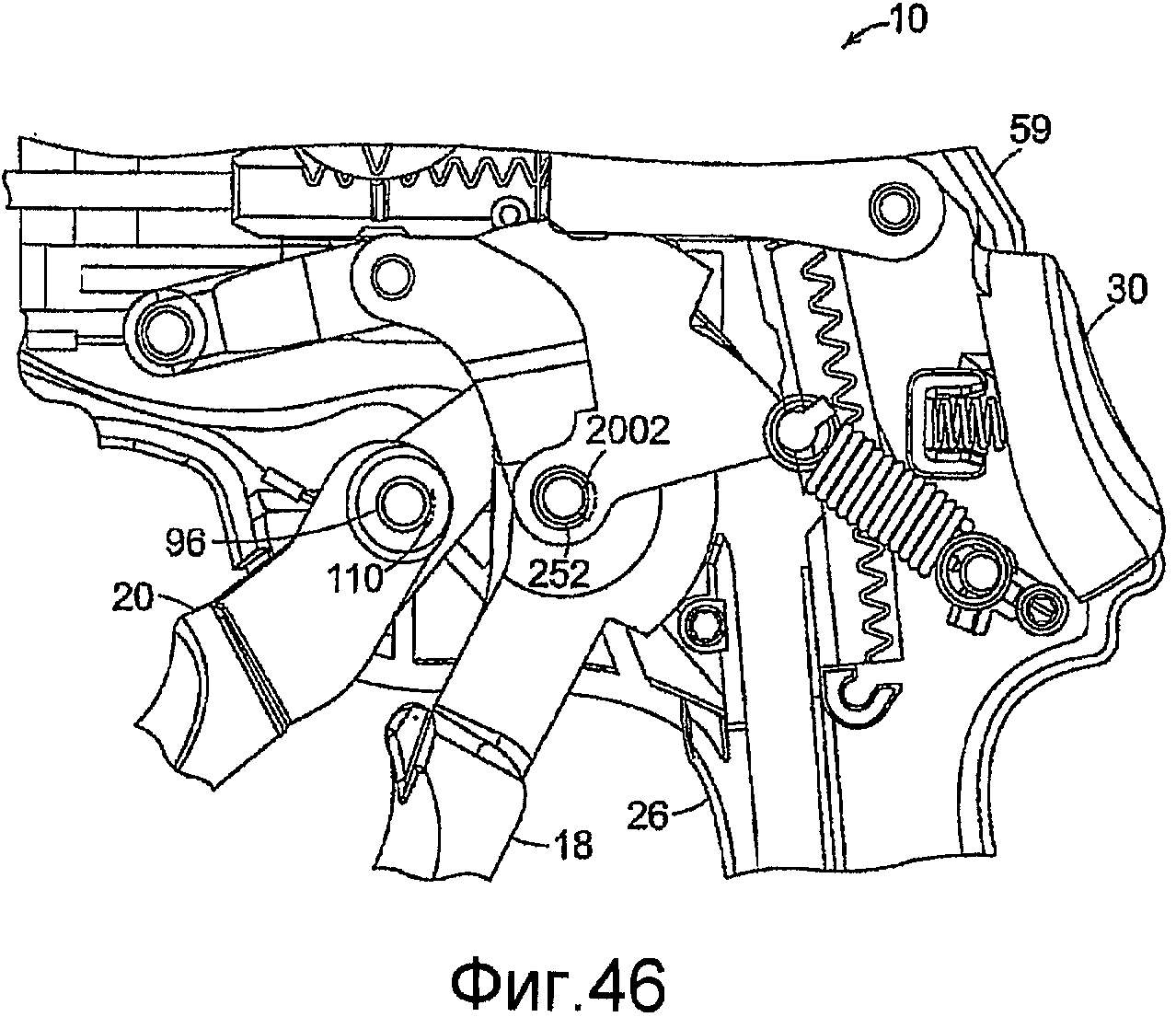
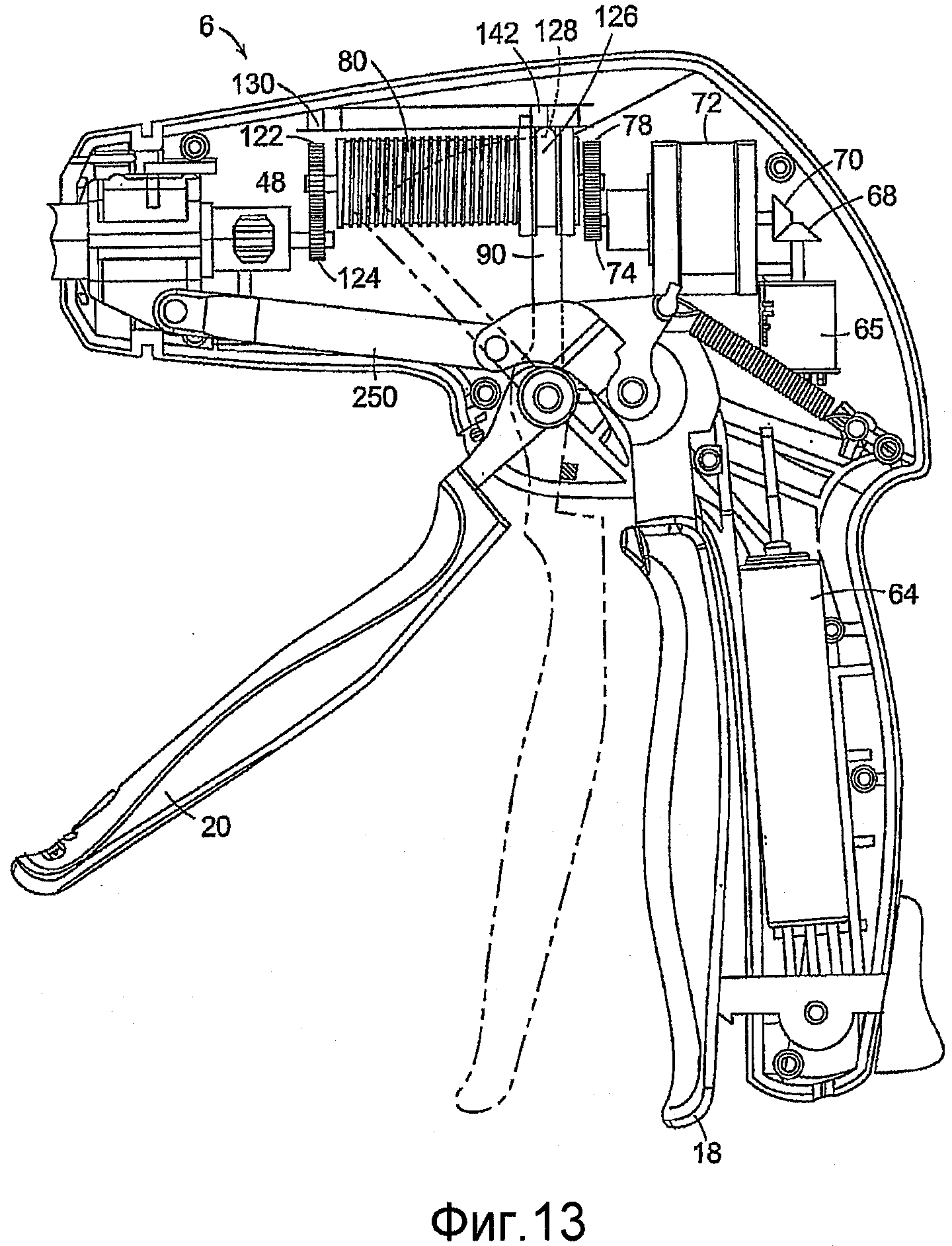
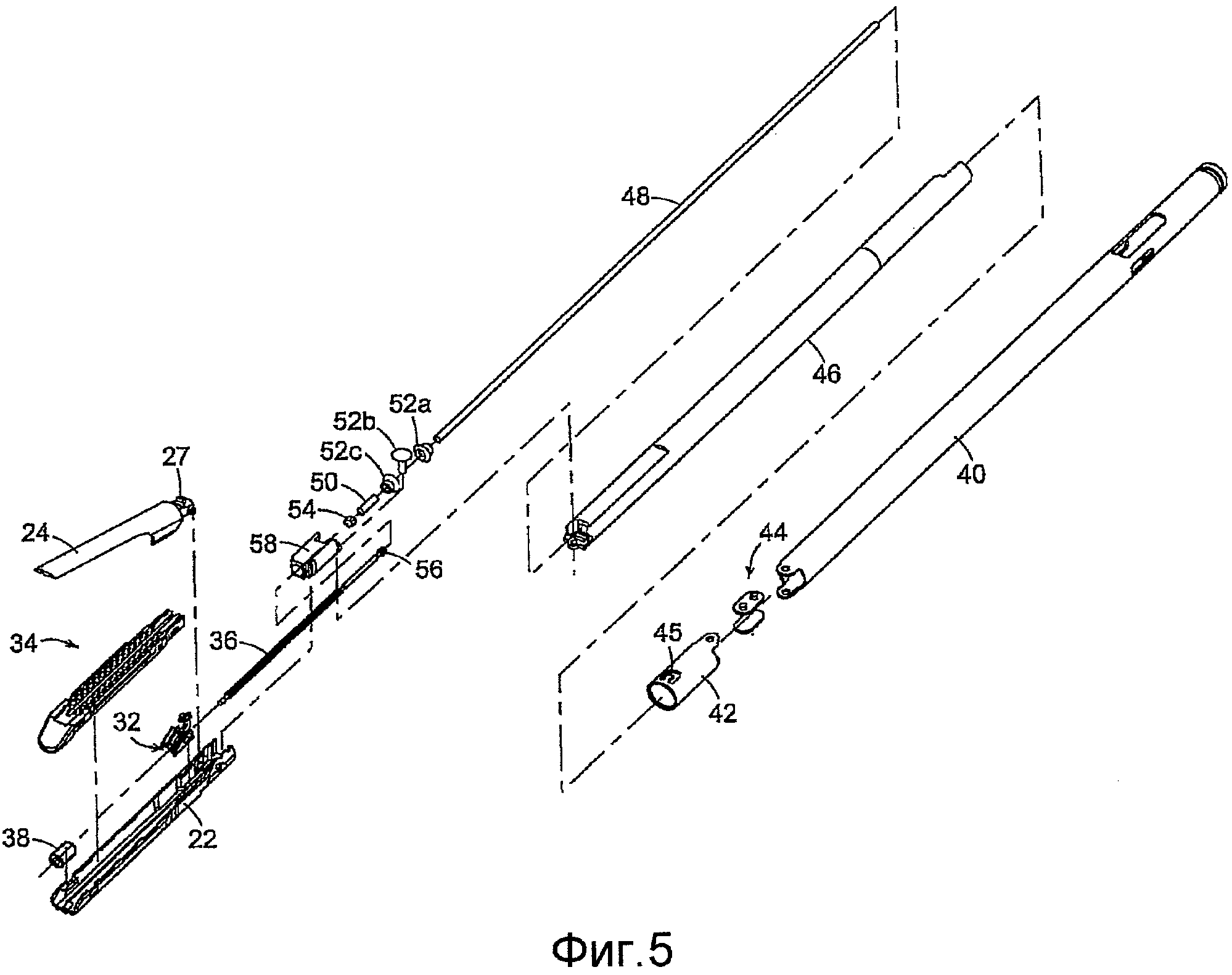
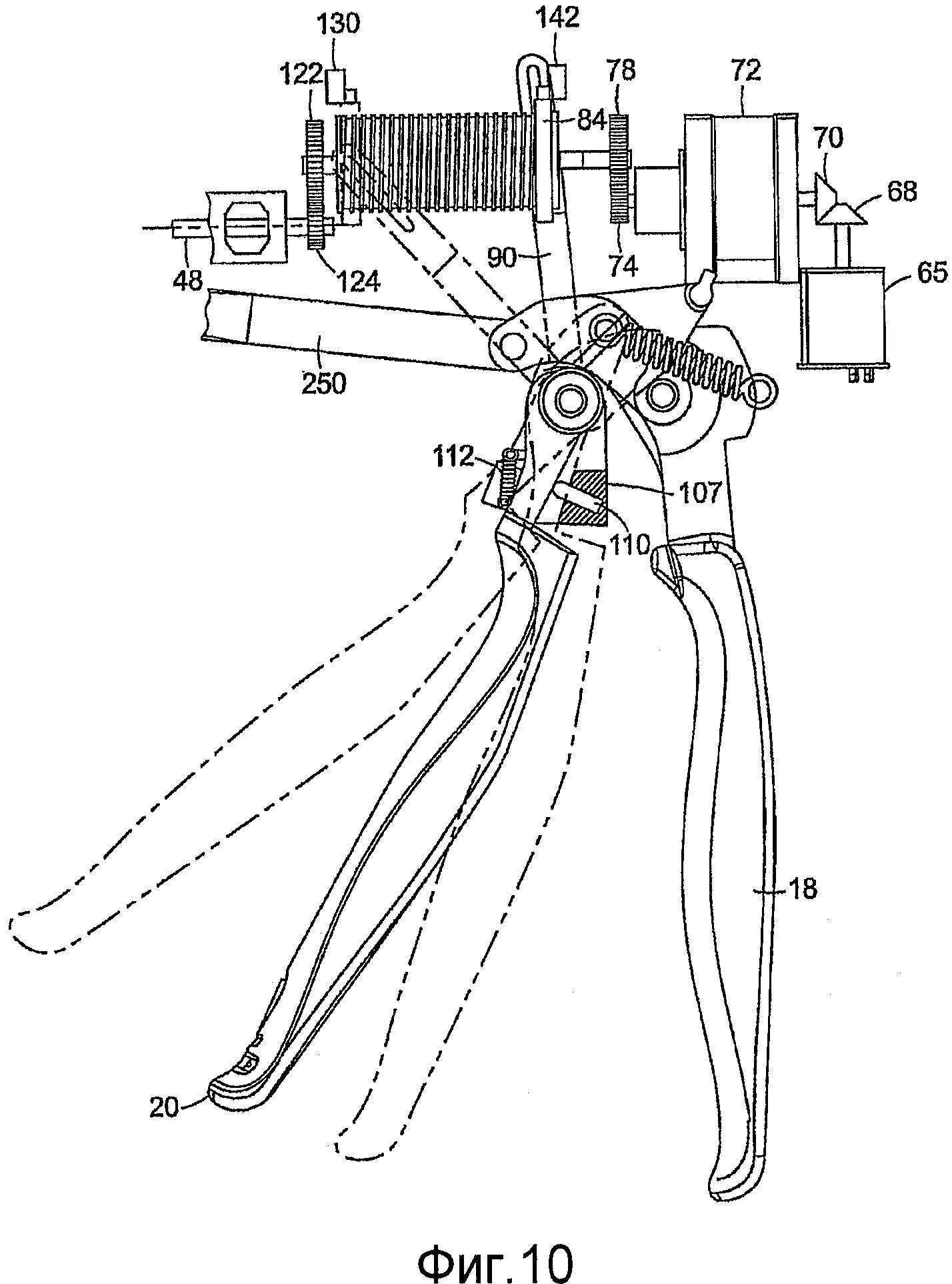
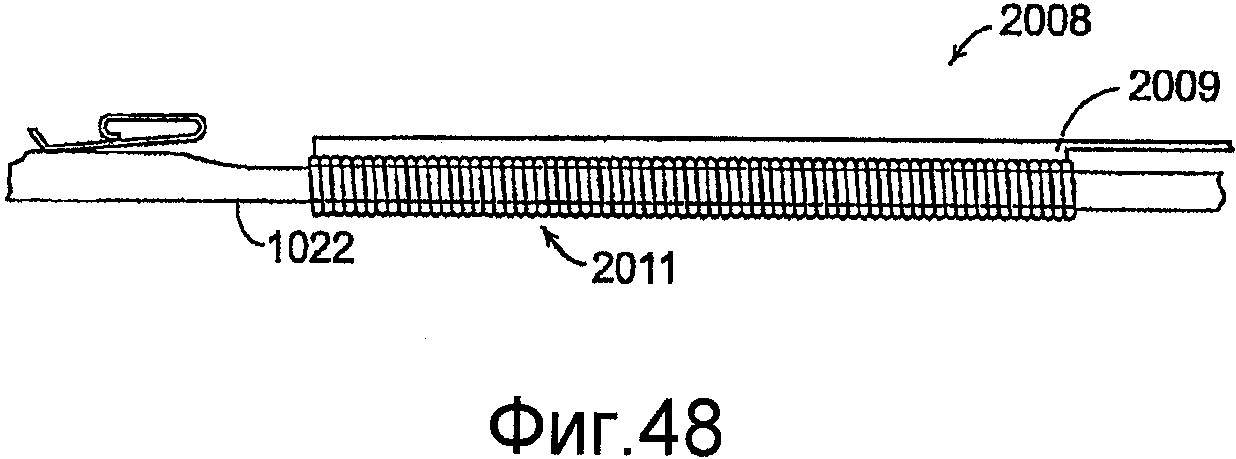
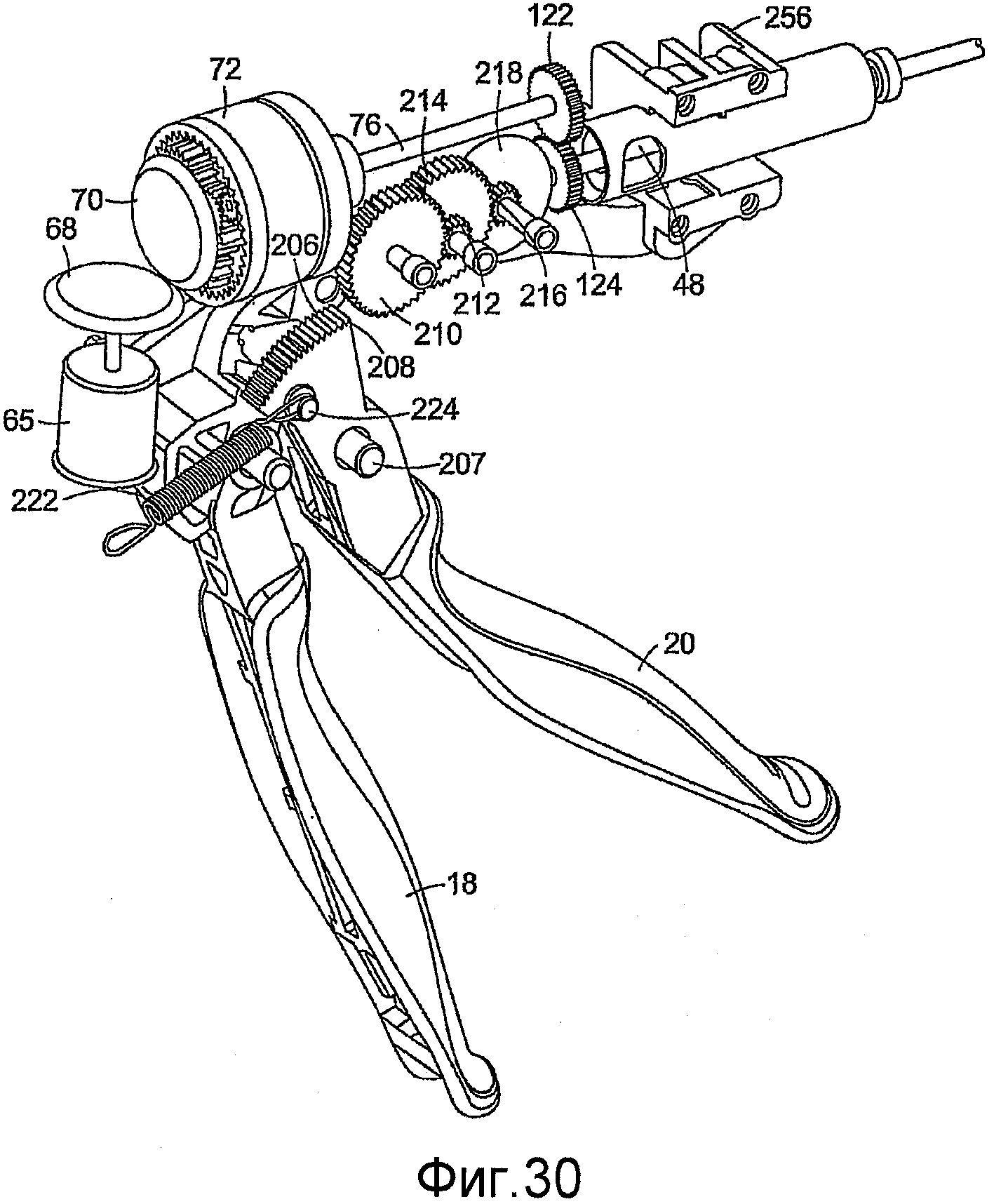
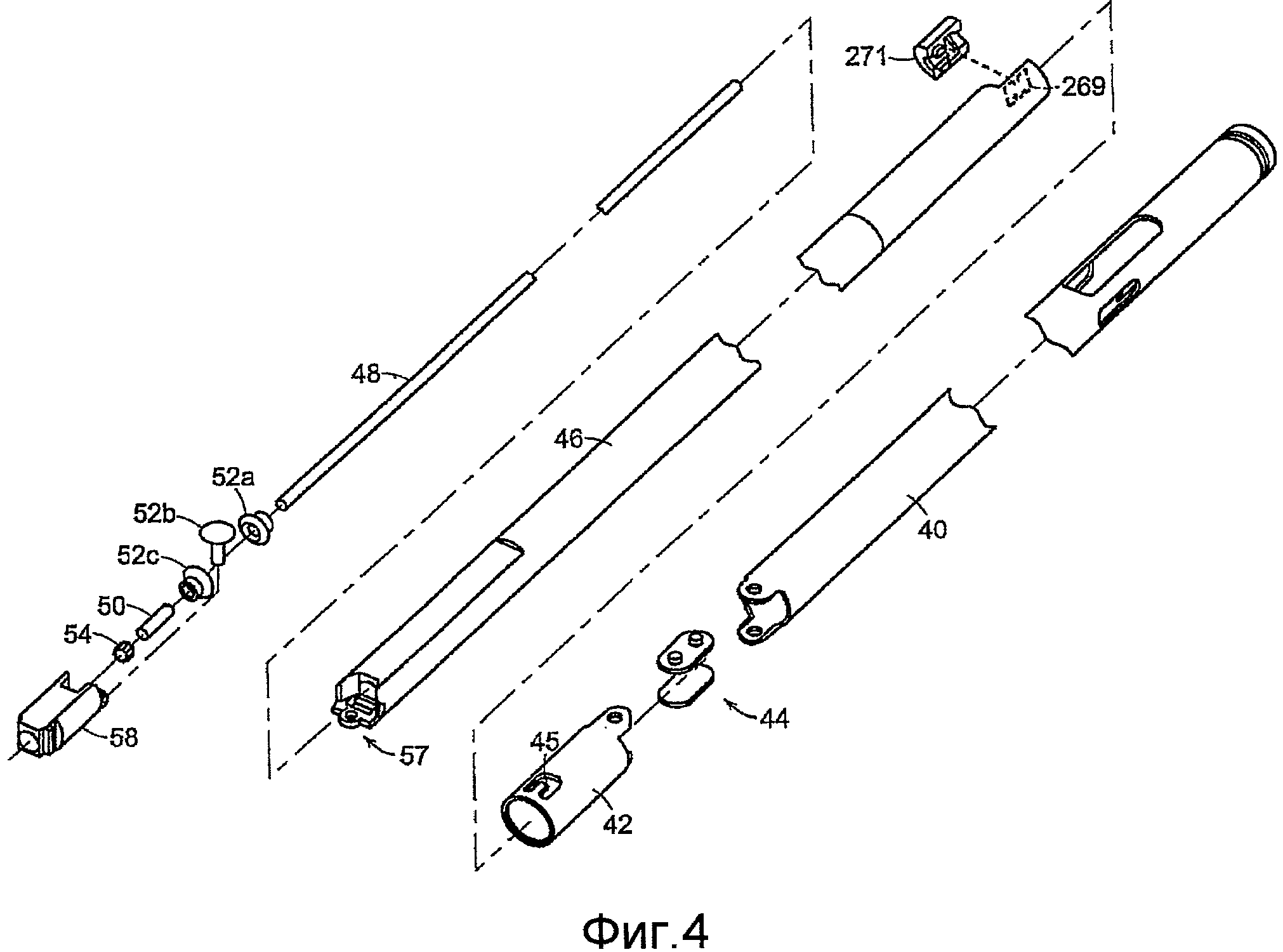
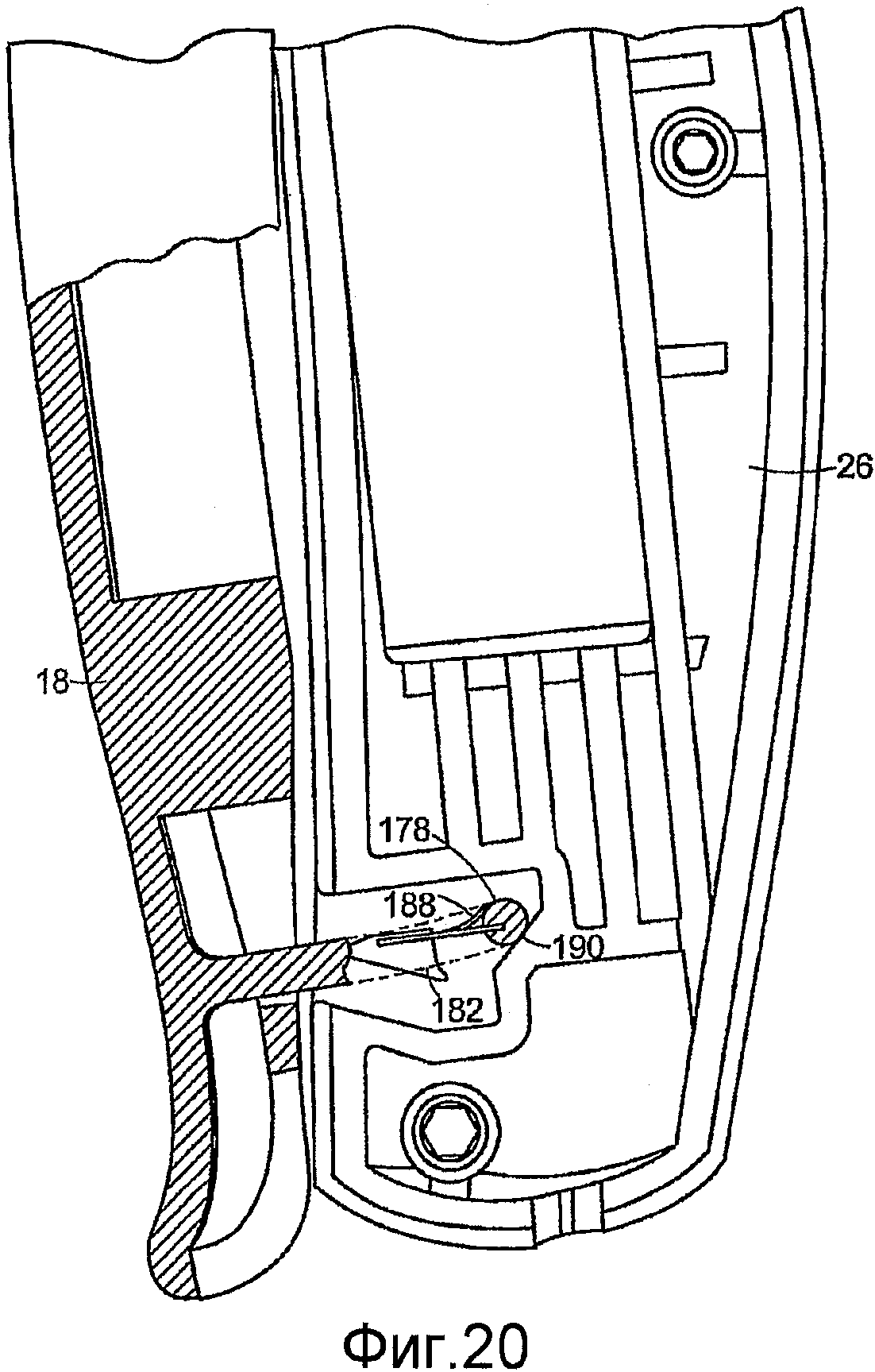
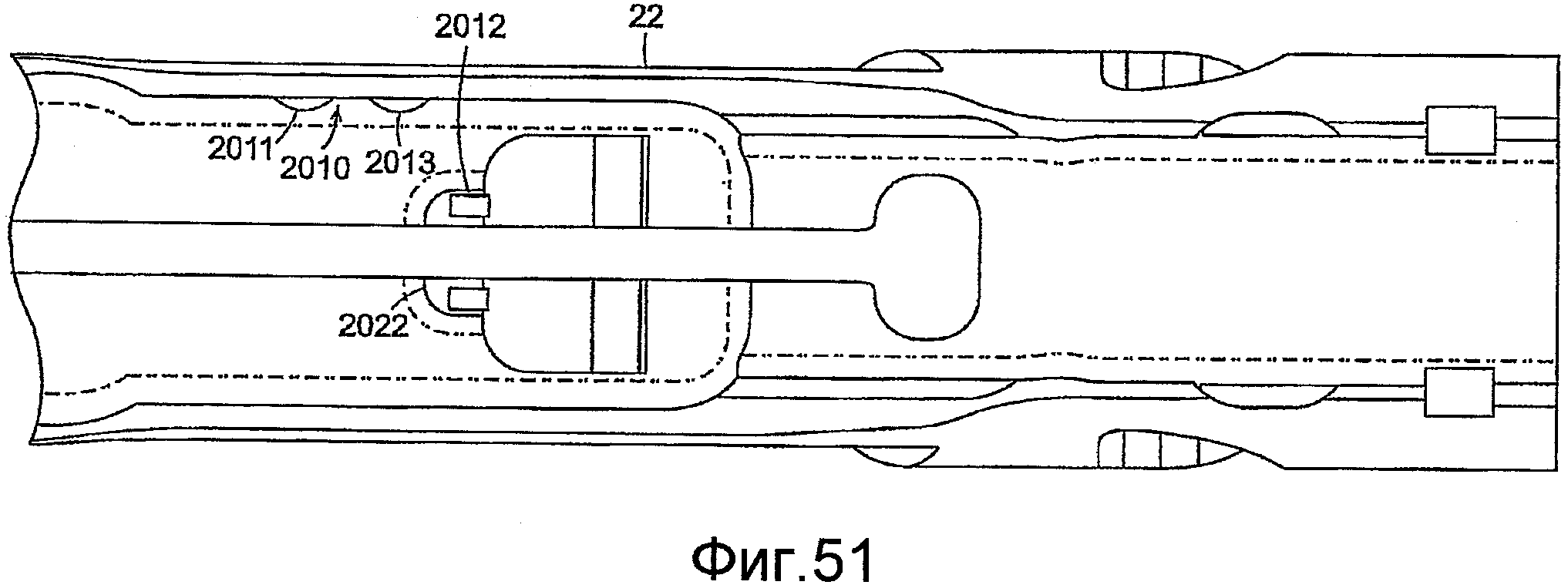
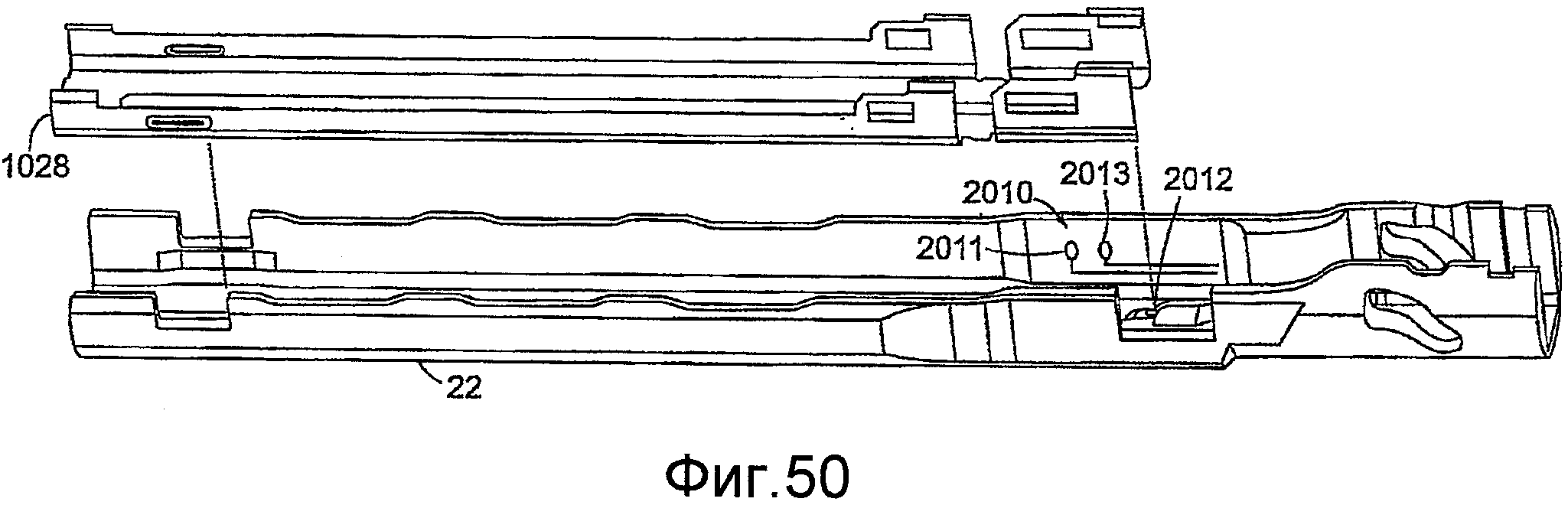
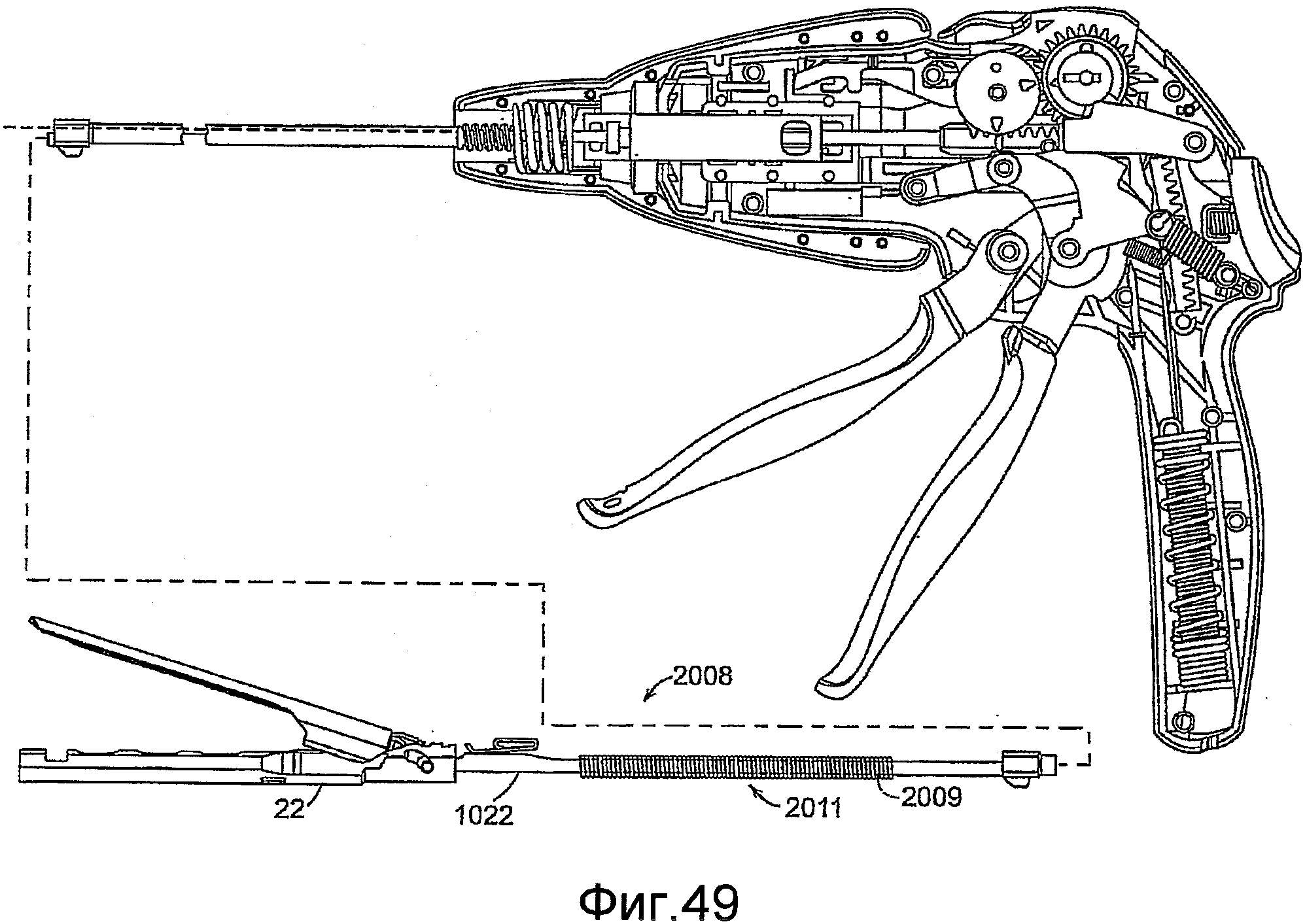
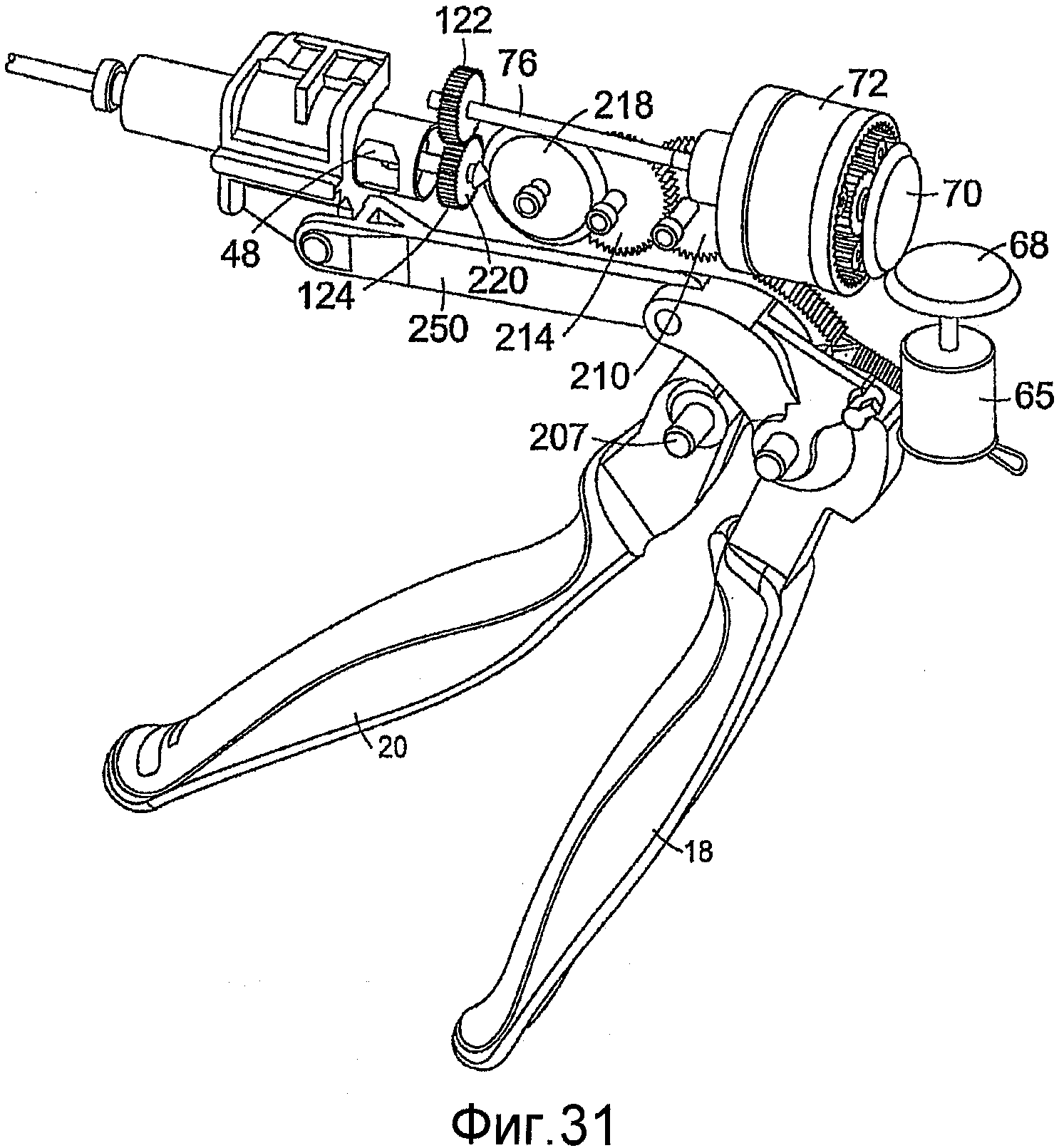
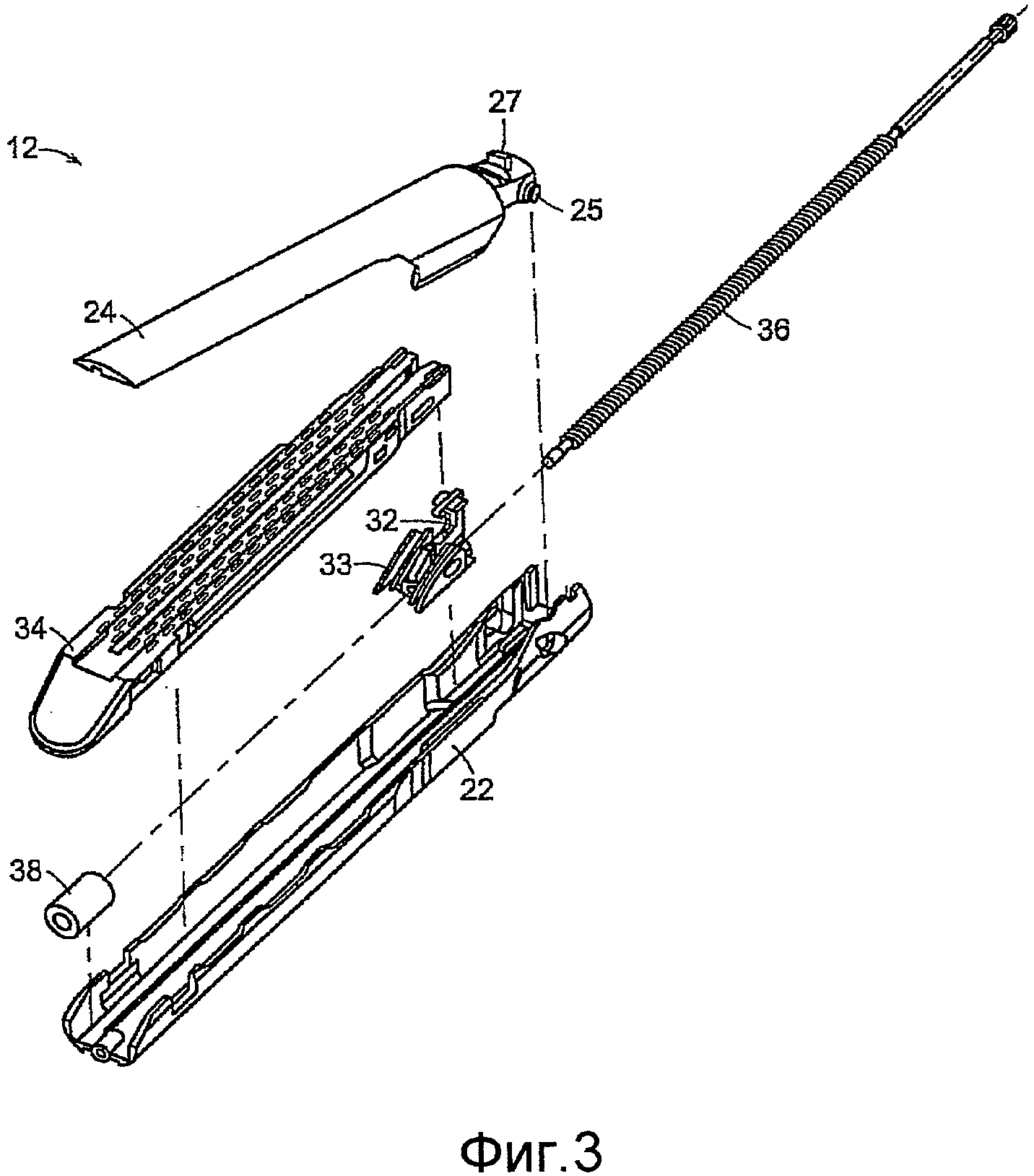
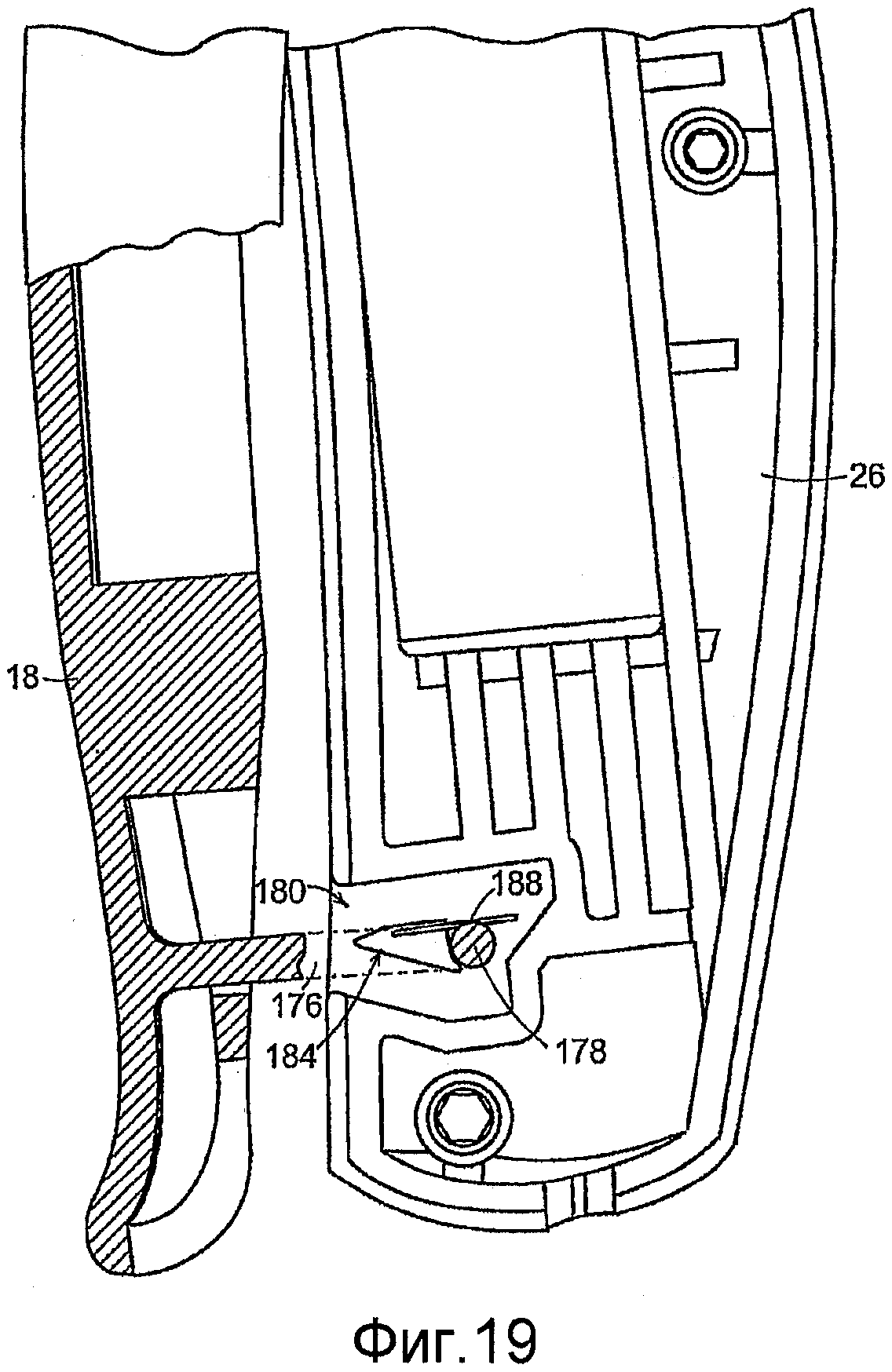
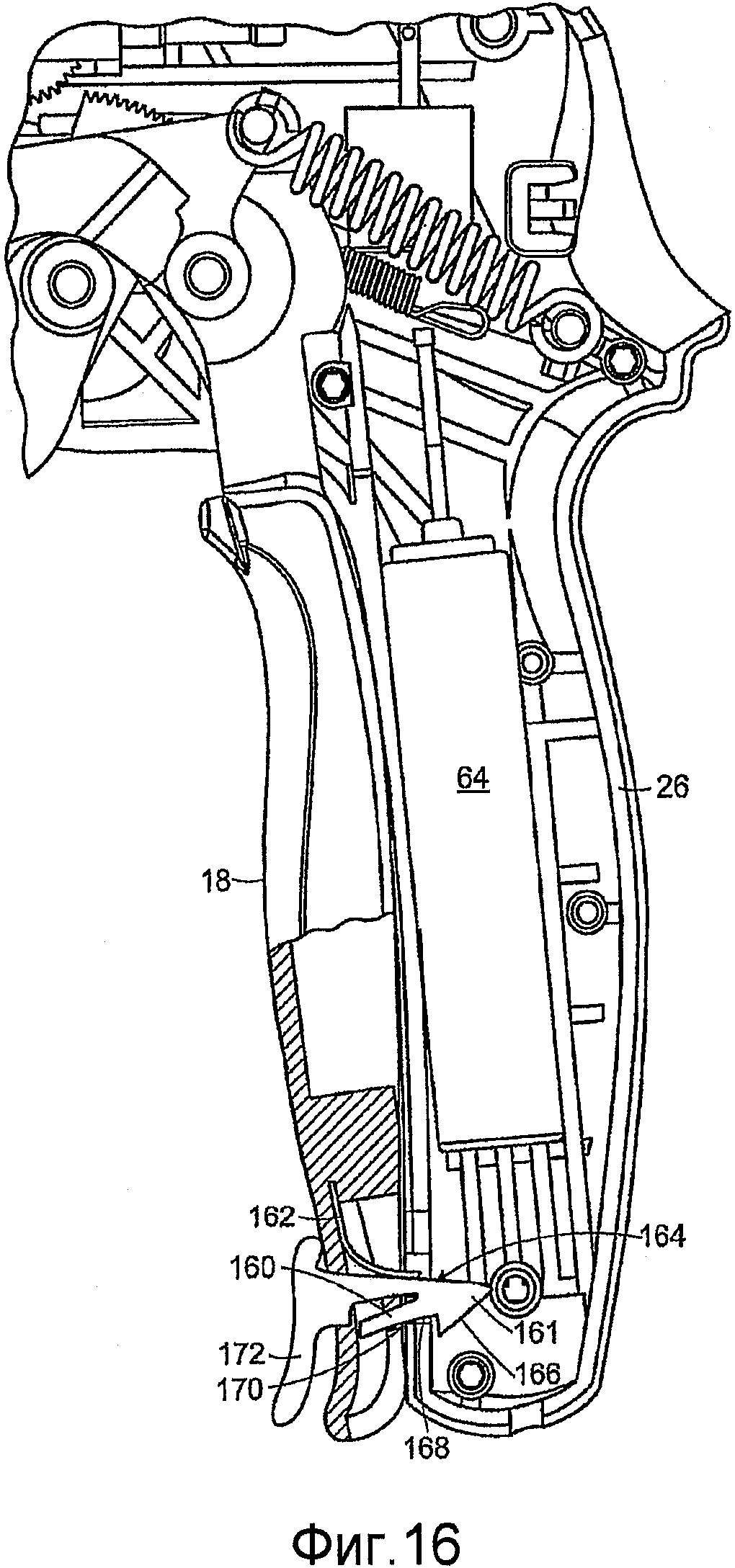
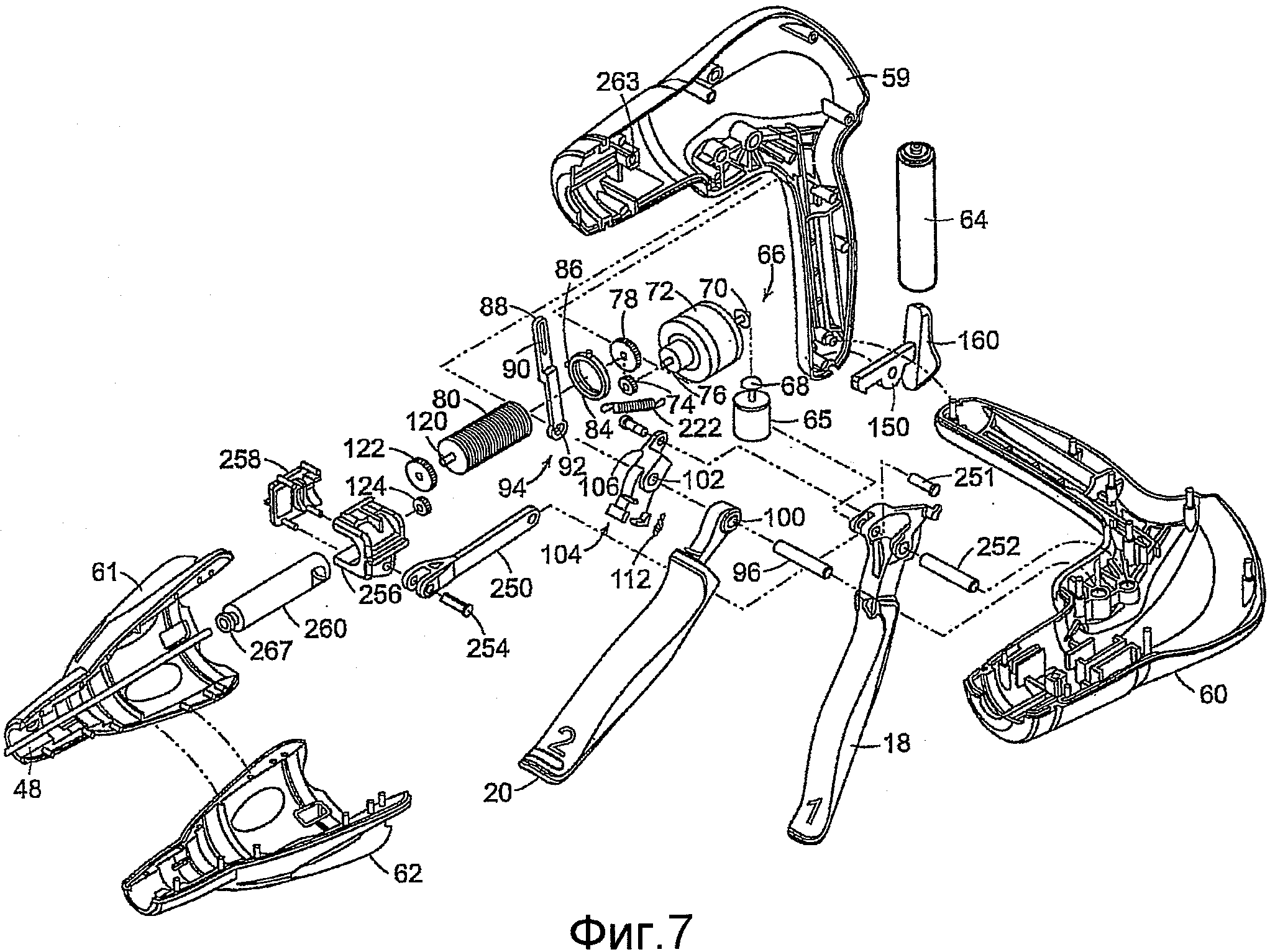
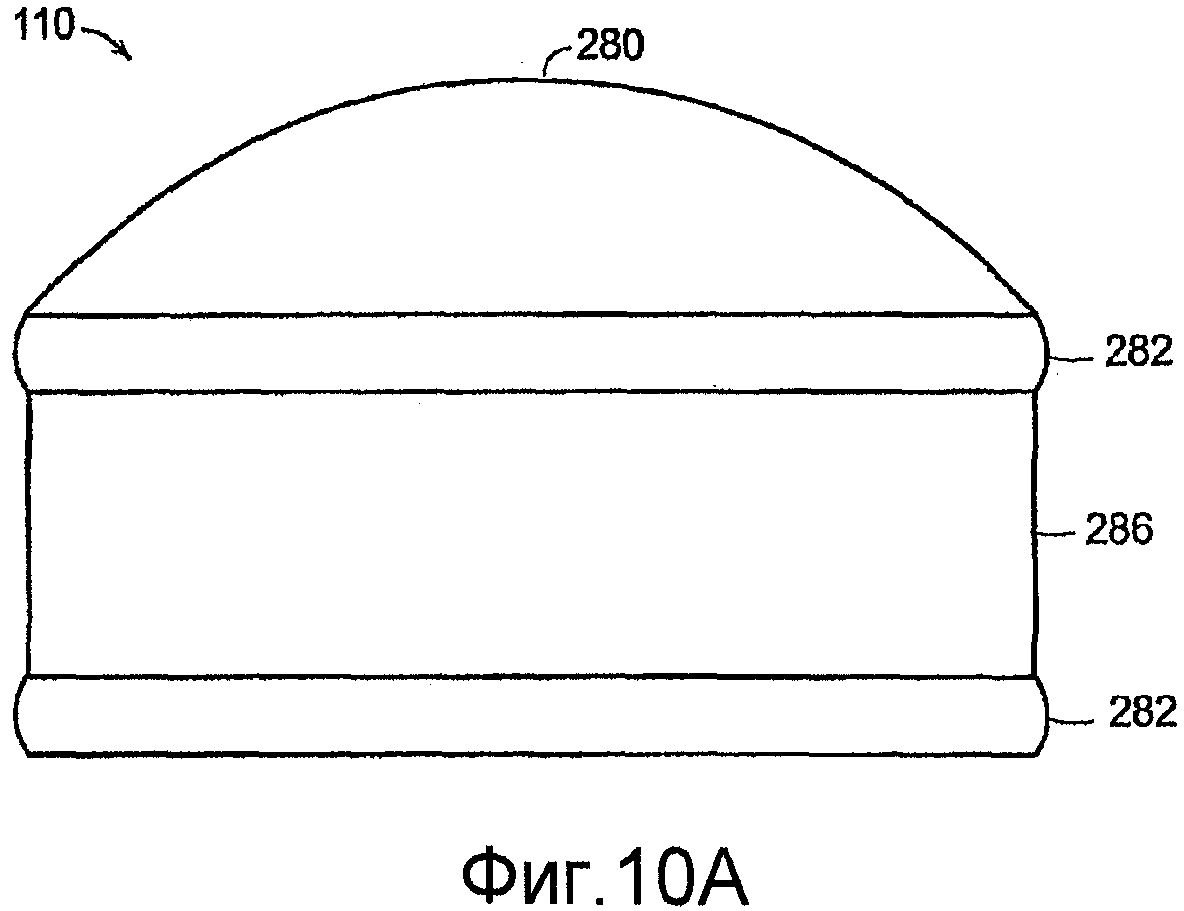
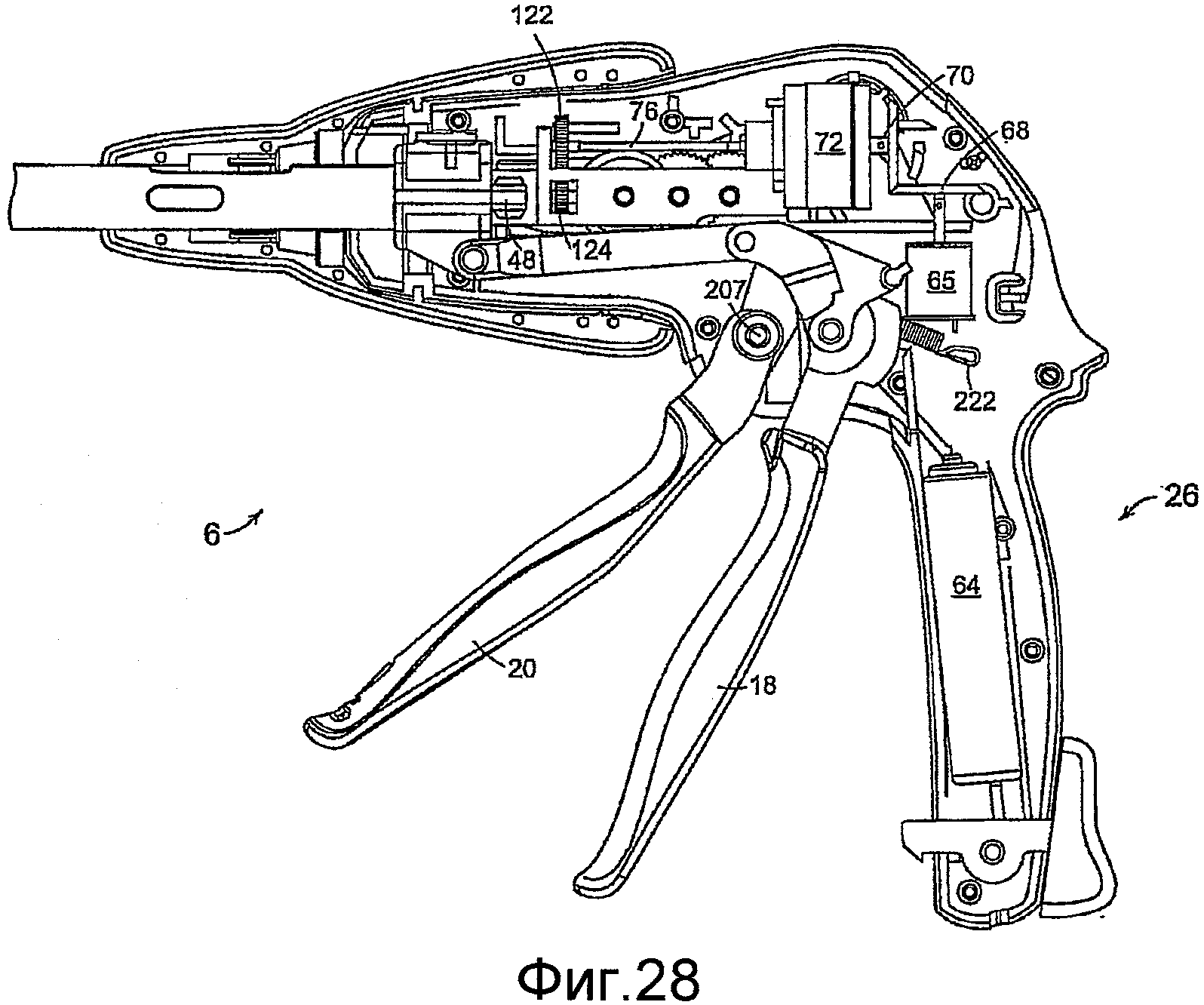
Пневмоприводной хирургический отрезной и фиксирующий аппарат с емкостью хранения увеличенного объема
Пневмоприводной хирургический отрезной и фиксирующий аппарат с исполнительным устройством на дистальном конце
Пневмоприводной хирургический отрезной и фиксирующий аппарат с плавным регулированием скорости приведения в действие прошивки/отрезания с механической поддержкой
Пневмоприводной хирургический отрезной и фиксирующий аппарат с механической рычажной передачей, связывающей движение концевого эффектора и рычага
Пневмоприводной хирургический отрезной и фиксирующий аппарат с ручным отводящим устройством
Индикаторное устройство для индикации характеристик ткани тела, подвергнутой сшиванию хирургическими скобами, как функции времени сжатия ткани
Хирургический сшивающий аппарат многократного использования (варианты) и способ его обработки (варианты)
Опорный материал с активируемым вяжущим веществом
Хирургический сшивающий аппарат с элементами управления, пригодными для работы одной рукой
Хирургический сшивающий аппарат с шарнирно-поворачиваемыми компонентами
Пневмоприводной хирургический отрезной и фиксирующий аппарат с емкостью хранения увеличенного объема
Пневмоприводной хирургический отрезной и фиксирующий аппарат с исполнительным устройством на дистальном конце
Пневмоприводной хирургический отрезной и фиксирующий аппарат с плавным регулированием скорости приведения в действие прошивки/отрезания с механической поддержкой
Пневмоприводной хирургический отрезной и фиксирующий аппарат с механической рычажной передачей, связывающей движение концевого эффектора и рычага
Пневмоприводной хирургический отрезной и фиксирующий аппарат с ручным отводящим устройством
Индикаторное устройство для индикации характеристик ткани тела, подвергнутой сшиванию хирургическими скобами, как функции времени сжатия ткани
Хирургический сшивающий аппарат многократного использования (варианты) и способ его обработки (варианты)
Опорный материал с активируемым вяжущим веществом
Хирургический сшивающий аппарат с элементами управления, пригодными для работы одной рукой
Хирургический сшивающий аппарат с шарнирно-поворачиваемыми компонентами

