Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОГО УСКОРЕНИЯ КОНТРОЛИРУЕМОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области приборостроения и может быть использовано для измерения углового ускорения.
Известны способ измерения ускорения и устройство для измерения ускорений, описанные в а.с.№767658, 1978 г., МПК G01P 15/08. Способ заключается в том, что определяется положение объекта через известные промежутки времени и по ним вычисляются скорость и ускорение.
Устройство, реализующее данный способ, содержит светодиоды, импульсный генератор и регистратор (фотопленку).
К недостаткам данного способа и устройства можно отнести относительно низкую точность измерений при малых скоростях движения и сложность обработки результатов.
Наиболее близким и выбранным в качестве прототипа является способ измерения угловых ускорений, описанный в а.с.№824061, опубл. 23.04.1981 г., МПК G01P 15/08 под названием «Цифровой измеритель ускорения вала», включающий измерение длительности интервалов времени между фронтами всех импульсов импульсного датчика углового положения, определение средней скорости на каждом интервале времени и значений углового ускорения. Устройство, реализующее данный способ, содержит импульсный датчик углового положения (квантователь), регистрирующее устройство и вычислитель (реализованный на триггерах и элементах цифровой логики).
К недостаткам данных технических решений относится недостаточная точность вычисления углового ускорения на конечном участке торможения контролируемого объекта (при малых скорости и угловом перемещении).
Целью данного изобретения является повышение точности определения углового ускорения на конечном участке торможения контролируемого объекта.
Это достигается тем, что в способе измерения углового ускорения контролируемого объекта, включающем измерение длительности интервалов времени между фронтами всех импульсов импульсного датчика углового положения, определение средней скорости на каждом интервале времени и значений углового ускорения, согласно изобретению создают относительное движение частей импульсного датчика углового положения, различно связанных с контролируемым объектом, обеспечивая генерирование датчиком максимального количества импульсов, и проводят измерение углового ускорения на конечном участке торможения контролируемого объекта.
А также это достигается тем, что устройство для измерения углового ускорения контролируемого объекта, содержащее импульсный датчик углового положения, регистрирующее устройство и вычислитель, снабжено инерционной массой и обгонной муфтой, установленной между контролируемым объектом и инерционной массой, при этом инерционная масса жестко закреплена на валу импульсного датчика углового положения.
Кроме того, в устройстве для измерения углового ускорения контролируемого объекта в качестве импульсного датчика угловых положений выбран датчик-энкодер.
Технический результат заключается в том, что удалось уменьшить неопределенность последовательности угловых положений контролируемого объекта и количество получаемых значений углового ускорения в важном интервале времени - непосредственно перед его остановкой и в момент остановки, уменьшив период импульсов датчика угловых положений и увеличив количество этих импульсов.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки способа (создание относительного движения частей импульсного датчика углового положения, различно связанных с контролируемым объектом, с обеспечением генерирования импульсным датчиком максимального количества импульсов на конечном участке торможения контролируемого объекта и произведение измерения значений угловой скорости при торможении) и устройства для измерения углового ускорения контролируемого объекта (снабжение его инерционной массой и обгонной муфтой, установленной между контролируемым объектом и инерционной массой, при этом инерционная масса жестко закреплена на валу импульсного датчика углового положения) не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
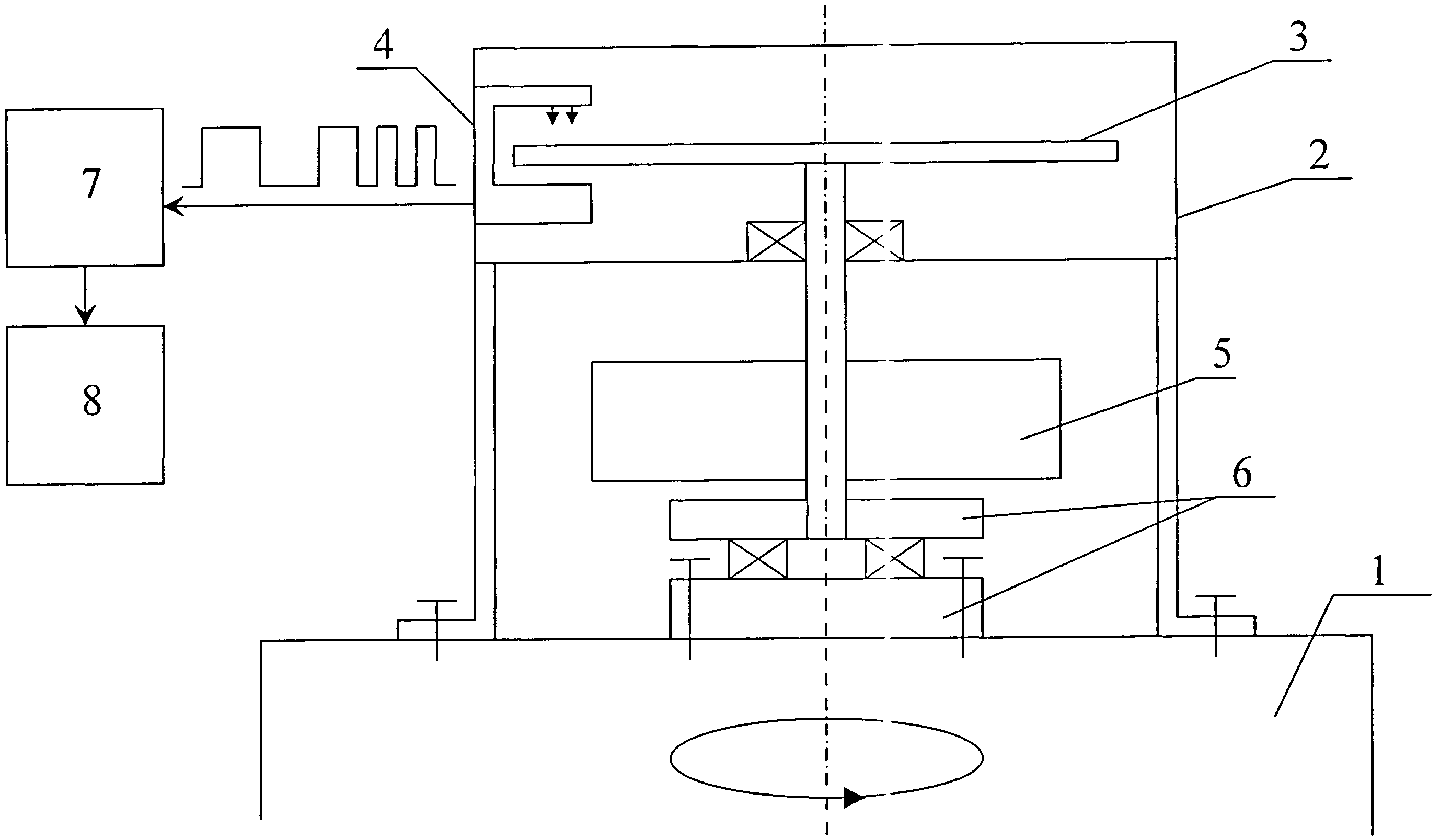
На чертеже представлен общий вид предлагаемого устройства.
Устройство для измерения углового ускорения контролируемого объекта 1, в качестве которого выбрана планшайба, содержит импульсный датчик углового положения 2, корпус которого жестко установлен на контролируемом объекте 1, регистрирующее устройство 7, записывающее в привязке ко времени сигналы с оптопар 4, входящих в состав датчика углового положения 2, вычислитель 8, обгонную муфту 6, установленную между контролируемым объектом 1 и инерционной массой 5, жестко закрепленной на валу оптического диска 3 датчика углового положения 2, в качестве которого выбран датчик-энкодер, выдающий 3600 импульсов за один оборот оптического вала.
Устройство работает следующим образом.
Контролируемый объект 1 приводится во вращение, при этом датчик углового положения 2 и инерционная масса 5 на этапе подготовки торможения вращаются вместе с контролируемым объектом 1 и имеют равную с ним угловую скорость. Импульсы на регистрирующее устройство 7 не поступают, так как оптический диск 3 не вращается относительно корпуса импульсного датчика углового положения 2 и установленных в нем оптопар 4.
При торможении контролируемого объекта 1 вместе с ним тормозится корпус датчика углового положения 2, а инерционная масса 5 продолжает вращение с достигнутой при разгоне скоростью, поскольку обгонная муфта 6 не препятствует этому. По мере торможения контролируемого объекта 1 частота следования импульсов с оптопар 4 растет и достигает максимума в момент остановки контролируемого объекта 1. Все импульсы фиксируются с привязкой по времени регистрирующим устройством 7. В вычислителе 8 на каждом угловом интервале определяется средняя скорость оптического диска 3, продолжающего вращение, относительно корпуса, тормозящегося вместе с объектом, а по разности значений скорости на соседних интервалах определяется угловое ускорение. При этом, благодаря тому, что скорость вращения оптического диска 3 относительно корпуса датчика углового положения 2 максимальна в момент остановки контролируемого объекта 1, количество получаемых значений скорости на важном участке также максимально. Максимальное ускорение достигается в момент остановки датчика углового положения 2 (план-шайбы), за последние 5-10 угловых минут достигается около (20-30)% углового ускорения. При отсутствии описанного соединения частей энкодера 2 на важном участке будет зарегистрировано 1-2 импульса, а при его наличии 100-200 импульсов.
Заявляемые способ и устройство позволили добиться повышения точности определения углового ускорения на конечном участке торможения контролируемого объекта.
Для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность осуществления способа и устройства для измерения углового ускорения контролируемого объекта и способность обеспечения достижения усматриваемого заявителем технического результата. Следовательно, заявленное изобретение соответствует условию «промышленная применимость».
Способ определения сплошности покрытия изделия
Интерферометр
Переход волоконно-оптический
Система параметрической гидролокации с функцией получения акустического изображения целей
Затвор люка камеры
Складываемая аэродинамическая поверхность
Контактный датчик
Двухдиапазонная микрополосковая антенна круговой поляризации
Сцинтилляционный материал на основе zno-керамики, способ его получения и сцинтиллятор
Устройство фиксации сложенных аэродинамических поверхностей летательного аппарата
Способ определения сплошности покрытия изделия
Интерферометр
Переход волоконно-оптический
Система параметрической гидролокации с функцией получения акустического изображения целей
Затвор люка камеры
Складываемая аэродинамическая поверхность
Контактный датчик
Двухдиапазонная микрополосковая антенна круговой поляризации
Сцинтилляционный материал на основе zno-керамики, способ его получения и сцинтиллятор
Устройство фиксации сложенных аэродинамических поверхностей летательного аппарата

