Результат интеллектуальной деятельности: МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ
Вид РИД
Изобретение
Изобретение относится к военной технике, а именно к многофункциональным робототехническим комплексам, предназначенным для дистанционной работы, и может быть использовано для решения задач обеспечения боевых действий Сухопутных войск.
Известен мобильный робототехнический комплекс (см. патент RU №2364500, B25J 5/00, 20.08.09 г.), принятый за прототип. Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки. По меньшей мере, один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях. Мобильный робототехнический комплекс снабжен дополнительно выносной системой видеонаблюдения. Мобильный робот дополнительно включает устройство доставки выносной системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, а комплект дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце.
Недостатками мобильного робототехнического комплекса, взятого за прототипа, являются:
- ограниченные функциональные возможности боевого применения мобильного робототехнического комплекса;
- ограниченные возможности по управляемости комплекса;
- отсутствие возможности работы в составе боевой группы роботов.
Предлагаемым изобретением решается задача по повышению эффективности применения мобильных роботизированных комплексов, предназначенных для обеспечения боевых действий Сухопутных войск.
Технический результат, получаемый при осуществлении изобретения, заключается в создании многофункционального робототехнического комплекса обеспечения боевых действий, обеспечивающего охрану или патрулирование гражданских и военных объектов, проведение боевых действий в городских и полевых условиях, ведение стрельбы по различным видам целей в дневных и ночных условиях, определение координат целей, ведение разведки местности и целей в дневных и ночных условиях, сбор и передачу разведывательной информации, доставку полезного груза до пункта назначения или его получение, эвакуацию раненых с мест ведения боевых действий или мест, представляющих потенциальную угрозу для человека при ЧС.
Указанный технический результат достигается тем, что в многофункциональном робототехническом комплексе обеспечения боевых действий, содержащем самодвижущее транспортное средство с системой технического зрения, системой связи и передачи данных и пульт дистанционного управления, новым является то, что он содержит группу универсальных роботизированных платформ, выполненных с возможностью комплектации различными функциональными модулями, устанавливаемыми в зависимости от планируемой боевой задачи: боевым дистанционно-управляемым модулем, транспортным модулем и модулем разведки, при этом каждая универсальная роботизированная платформа оснащена системой навигации и топопривязки и выполнена с возможностью обеспечения перемещения в дистанционном ручном режиме, в полуавтоматическом режиме с движением по траектории, задаваемой оператором путем ввода географических координат узловых точек маршрута, передачи информации о скорости и направлении движения, углах продольного и поперечного крена и текущих координат, и с движением по траектории, сохраненной ранее при движении в ручном режиме, с возможностью автоматического возвращения в исходную точку по пройденному маршруту и автоматического объезда препятствий, при этом пункт дистанционного управления выполнен с возможностью одновременного или последовательного управления всей группой универсальных роботизированных платформ с любыми из установленных на них функциональными модулями, при этом боевой дистанционно-управляемый модуль выполнен с возможностью обнаружения цели, ее автоматического сопровождения и поражения, с возможностью запоминания в произвольной последовательности нескольких неподвижных целей с последующим автоматическим наведением и открытием огня, модуль разведки выполнен с возможностью обнаружения цели и ее распознавания с определением координат и дальности, а транспортный модуль выполнен с возможностью транспортирования полезной нагрузки и ее фиксации на платформе.
Формирование многофункционального робототехнического комплекса обеспечения боевых действий из группы универсальных роботизированных платформ, выполненных с возможностью их комплектации различными вариантами функциональных модулей, позволяет:
- создавать группы универсальных роботизированных платформ одной функциональной направленности: боевая группа роботов, разведывательная группа роботов, транспортная группа роботов;
- создавать группы универсальных роботизированных платформ комбинированной функциональной направленности: разведывательно-боевая или транспортно-боевая группа роботов, состоящая из модуля разведки или транспортного модуля и боевых модулей группы прикрытия;
- определять состав многофункционального робототехнического комплекса в зависимости от планируемой боевой задачи.
Оснащение универсальной роботизированной платформы системой навигации и топопривязки позволяет:
- обеспечить начальную привязку универсальной роботизированной платформы;
- обеспечить определение текущих координат, дирекционного угла продольной оси платформы;
- привязку информационно-вычислительной системы платформы к шкале единого времени;
- сохранение географических координат пройденного пути и передачу их оператору на пункт дистанционного управления;
- отображение маршрута движения платформы на цифровой карте местности.
Обеспечение перемещения универсальной роботизированной платформы как в дистанционном ручном режиме, так и в полуавтоматическом с возможностью объезда препятствий позволяет:
- улучшить управляемость отдельной платформой и комплексом в целом;
- повысить уровень автономности платформы при выполнении задач по назначению.
Обеспечение пунктом дистанционного управления возможности одновременного управления всей группой универсальных роботизированных платформ с любыми установленными на них функциональными модулями, а также их последовательного управления позволяет:
- контролировать ситуацию на всем театре боевых действий, ведущихся с участием многофункционального робототехнического комплекса;
- максимально реализовать возможности комплекса.
Обеспечение боевым дистанционно-управляемым модулем обнаружения цели, ее автоматическое сопровождение и поражение цели, а также запоминание в произвольной последовательности нескольких неподвижных целей с последующим автоматическим наведением и открытием огня,позволяет:
- обеспечить дальность обнаружения цели (фигура человека) при метеорологической дальности видимости не менее 5000 м до 2000 м;
- обеспечить дальность поражения цели при метеорологической дальности видимости не менее 5000 м до (800-1000) м;
- обеспечить дальность обнаружения цели в ночных условиях при освещенности 10-4 лк не менее 1000 м;
- обеспечить дальность поражения цели в ночных условиях при освещенности 10-4 лк не менее 500 м;
- обеспечить дальность обнаружения цели в условиях задымленности атмосферы до 800 м;
- обеспечить дальность обнаружения цели в условиях тумана до 200 м;
- обеспечить дальность обнаружения цели в условиях дождя днем до 800 м, ночью до 200 м;
- обеспечить дальность поражения цели в условиях задымленности атмосферы до 500 м;
- обеспечить дальность поражения цели в условиях тумана до 200 м;
- обеспечить дальность поражения цели в условиях дождя днем до 500 м, ночью до 200 м.
Обеспечение модулем разведки обнаружения цели, ее распознавания с определением координат, дальности позволяет:
- обеспечить обнаружение цели до 5000 м, распознавание цели до 3500 м с определением координат цели с погрешностью до 30 м;
- обеспечить определение дальности до цели с погрешностью до 10 м;
- обеспечить формирование для передачи на пункт дистанционного управления информационных команд, телеметрической информации и видеоизображения;
- обеспечить максимальную зону обзора по горизонтали ±360°, по вертикали от -20° до +60°.
Обеспечение транспортным модулем транспортирования возимой полезной нагрузки и ее надежной фиксации на платформе, а также при необходимости эвакуации раненых позволяет:
- обеспечить транспортирование возимой полезной нагрузки до 300 кг;
- обеспечить эвакуацию раненых из зоны огневого поражения.
Обеспечение комплекса дополнительным оборудованием в виде автомобиля с кузовом-фургоном для размещения, доставки к месту использования всей группы платформ с установленными на них функциональными модулями, пульта дистанционного управления и выгрузки платформ своим ходом позволяет:
- обеспечить мобильное развертывание многофункционального робототехнического комплекса в зоне ответственности;
- обеспечить мобильное перебазирование комплекса;
- обеспечить сохранность комплекса при транспортировании.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
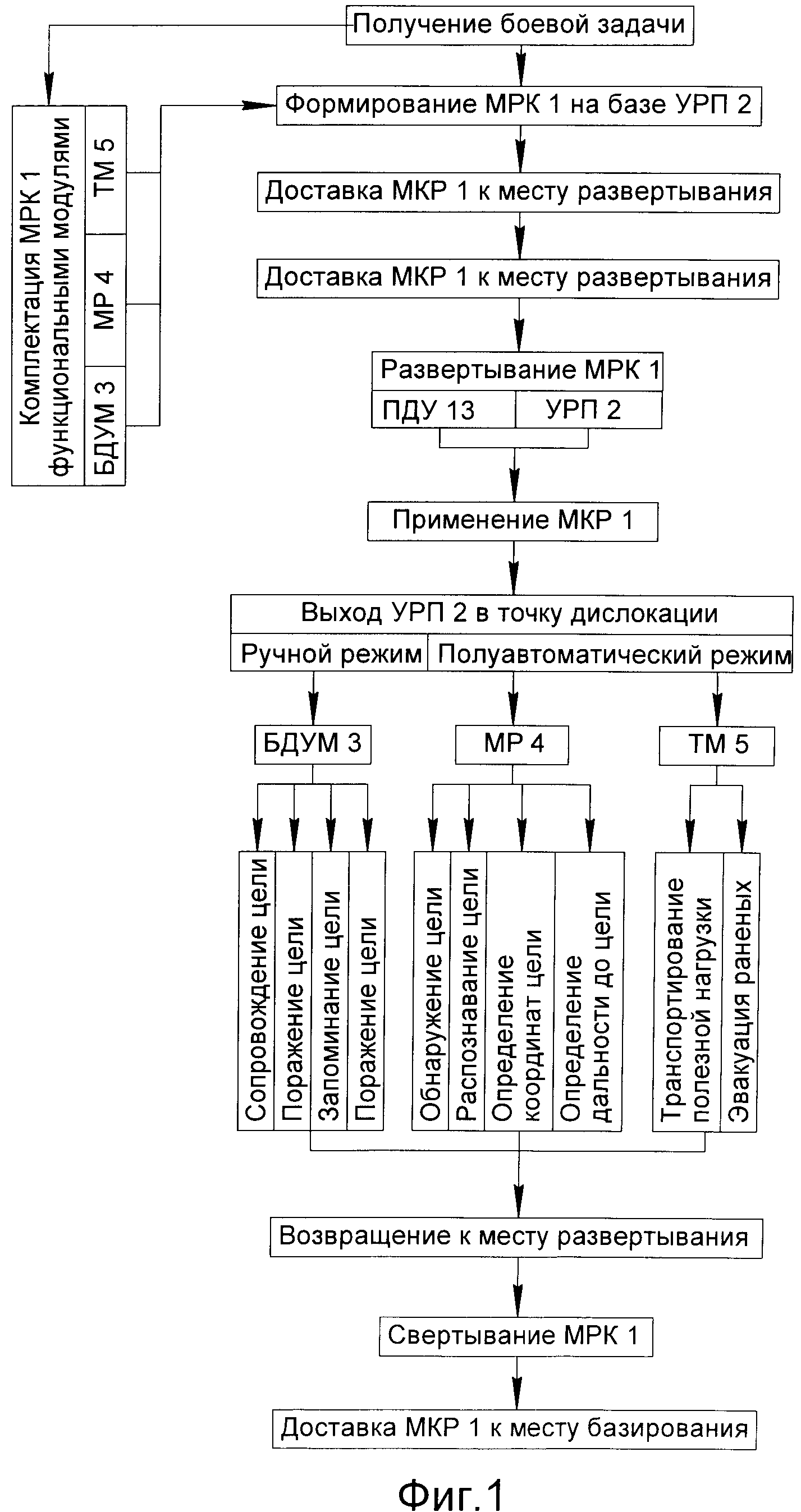
Сущность изобретения поясняется чертежами, где на фиг. 1 показан алгоритм применения комплекса; на фиг. 2 - структурная схема комплекса.
Многофункциональный робототехнический комплекс обеспечения боевых действий (МРК) 1 относится к «мобильным роботам», отличительной чертой которых является наличие локомоционной способности (т.е. способности к переместительным движениям системы в пространстве).
Универсальная роботизированная платформа (УРП) 2 в данном случае представляет собой самодвижущее транспортное средство, предназначенное для доставки специального и технологического оборудования к месту выполнения поставленной боевой задачи.
На первоначальном этапе на базе УРП 2 формируется МРК 1. В зависимости от планируемой боевой задачи МРК 1 может комплектоваться различными вариантами функциональных модулей: боевой дистанционно-управляемый модуль (БДУМ) 3, модуль разведки (МР) 4, транспортный модуль (ТМ) 5.
Либо любой другой количественно-качественный вариант исполнения МРК 1.
В зависимости от типа применяемых функциональных модулей МРК 1 обеспечивает выполнение в дистанционном ручном режиме дальностью до 2-х км или полуавтономном режиме управления следующих основных задач:
- охрану или патрулирование гражданских и военных объектов;
- огневое прикрытие цели в городских и полевых условиях;
- проведение боевых действий в городских и полевых условиях;
- ведение стрельбы по различным видам целей в дневных и ночных условиях;
- определение координат целей;
- ведение разведки местности и целей в дневных и ночных условиях;
- сбор и передачу разведывательной информации;
- доставку полезного груза до пункта назначения или его получение;
- эвакуацию раненых с мест ведения боевых действий или мест, представляющих потенциальную угрозу для человека при ЧС.
Для обеспечения функциональных возможностей МРК 1 предусмотрено одновременное управление несколькими УРП 2 с установленными на них различными модулями (разведывательно-боевая или транспортно-боевая группа роботов, состоящая из модуля разведки или транспортного модуля и боевых модулей группы прикрытия).
В состав УРП 2 входят: транспортное шасси (ТШ) 6, информационно-вычислительная система (ИВС) 7, система связи и передачи данных УРП 2 (ССПД УРП) 8, система технического зрения для управления движением (СТЗ) 9, система топопривязки и навигации (СТН) 10, система электропитания УРП 2 (СЭ УРП) 11. УРП 2 способна перемещаться по маршруту с установленным на ней функциональным модулем в дистанционном ручном режиме или полуавтоматическом в условиях любого времени суток и времени года. Управление УРП 2 осуществляется по радиоканалу связи с помощью пульта управления (ПУ) 12, находящегося на пункте дистанционного управления (ПДУ) 13 на дальности до 2 км или с помощью мобильного пульта управления (МПУ) 14 на дальности до 200 м. МПУ 14, в частности, используется при выдвижении УРП 2 на начальную точку для геодезической привязки, при погрузочно-разгрузочных работах. Видеоизображение с видеокамер УРП 2 позволяет обеспечивать передвижение платформы вперед и назад с достаточным углом обзора. На ПДУ 13 передается видеоизображение с видеокамер УРП 2, а также телеметрическая информации о состоянии УРП 2 (скорость движения, направление движения, углы наклона, текущие координаты, параметры работы двигателя и др.). При использовании СТН 10 движение УРП 2 происходит по траектории, задаваемой оператором путем ввода географических координат узловых точек маршрута в ИВС 7 или по траектории, сохраненной ранее при движении в ручном режиме. В УРП 2 реализован режим автоматического возвращения в исходную точку по пройденному маршруту, а при потере связи - автоматическое возвращение по пройденному маршруту в точку восстановления связи.
ТШ 6 обеспечивает движение по пересеченной местности со скоростью до 10 км/ч, движение по шоссе со скоростью до 25 км/ч, допустимый поперечный крен до 25 град., допустимый продольный крен до 25 град, преодоление уступа высотой до 20 см, преодоление рва шириной до 40 см.
ИВС 7 производит обработку информации от ПДУ 13, формирование для передачи на ПДУ 13 информационных команд, телеметрической информации и видеоизображения, сжатие информации при передаче по каналу связи, криптографическую защиту информации, управление датчиками и приводами, дистанционное и полуавтоматическое управление движением УРП 2, запоминание координат и видеоизображения маршрута движения УРП 2, решение топогеодезических задач, привязку УРП 2 к шкале единого времени.
СТЗ 9 обеспечивает управление движением УРП 2 вперед, маневрированием, движением задним ходом, возможность наблюдения спереди и сзади УРП 2 с достаточным углом обзора, распознавание состояния дороги и препятствий, дистанционное управление переключением видеокамер.
СТН 10 включает в себя инерциальную систему ориентации в пространстве (ИССОП) 15 и спутниковую навигационную систему (СНС) 16. Посредством СТН 10 выполняется начальная привязка УРП 2, определение текущих координат, дирекционного угла продольной оси УРП 2.
Для управления МРК 1 развертывается пункт дистанционного управления (ПДУ) 13, в состав которого входят укрытие (У) 17 (палатка, тент, маскировочная сеть), пульт управления (ПУ) 12, мобильный пульт управления (МПУ) 14, система электропитания ПДУ 13 (СЭ ПДУ) 18, рабочее место (РМ) 19 операторов, система связи и передачи данных ПДУ 13 (ССПД ПДУ) 20;
ПДУ 13 обеспечивает работу в условиях дня и ночи в любое время года. Доставка аппаратуры и инвентаря ПДУ 13 при необходимости от места разгрузки с транспортировочного автомобильного кузова-фургона (КФ) 21 до пункта управления осуществляется на УРП 2 с помощью МПУ 14. ПДУ 13 обеспечивает одновременное управление несколькими УРП 2 с установленными на них боевыми, разведывательными или транспортными модулями.
ПУ 12 обеспечивает решение информационных и расчетных задач, формирование и передачу команд управления на УРП 2. ПДУ 13 обеспечивает прием, обработку и отображение видеоинформации от системы технического зрения СТЗ 9 в реальном масштабе времени (прямая трансляция). ПУ 12 отображает телеметрическую информацию о состоянии УРП 2 и его модуля (готовность, скорость движения, направление движения, углы наклона, текущие координаты, параметры работы двигателя и др.), а на цифровой карте местности информацию о месте расположения и маршруте движения УРП 2. С помощью ПУ 12 обеспечивается задание траектории движения УРП 2 путем ввода географических координат узловых точек маршрута в систему. ПДУ 13 дообеспечивает контроль движения УРП 2, корректировку или прекращение движения в критических ситуациях.
В зависимости от боевой задачи в МРК 1 могут использоваться различные модификации БДУМ 3: БДУМ 3.1, оснащенный поворотной платформой с системой наведения (ППСН) 22 и 12,7 - мм пулеметом (П) 23, БДУМ 3.2, оснащенный поворотной платформой с системой наведения ППСН 22 и 7,62 - мм пулеметом (П) 24. БДУМ 3 обеспечивает возможность ведения стрельбы короткими (2-5 выстрелов), длинными (до 10 выстрелов) очередями и непрерывным огнем. Длительность очереди устанавливается оператором. При этом обеспечивается стабилизация ППСН 22 в горизонтальной и вертикальной плоскости во время движения УРП 2, на которой установлен БДУМ 3. В БДУМ 3 предусмотрено устройство автоматического сопровождения целей и механизм дистанционного взвода оружия (с блока управления). БДУМ 3 обеспечивает ручной режим выбора и запоминания в произвольной последовательности не менее десяти неподвижных целей с последующим автоматическим наведением и ведением огня по ним. Передача данных между ПДУ 13 и БДУМ 3 осуществляется по защищенному радиоканалу связи дальностью до 2 км (в условиях прямой радиовидимости).
Для обеспечения требований по назначению МР 4 комплектуется поворотной платформой (ПП) 25, телескопической мачтой (ТМ) 26, лазерным дальномером (ЛД) 27, телевизионной камерой высокого разрешения (ТКВР) 28, тепловизионной камерой (ТК) 29, лазерным подсветчиком цели (ЛПЦ) 30.
При максимальной высоте подъема ТМ 26 до 3 м МР 4 обеспечивает обнаружение цели, ее распознавание с определением координат, определение дальности, формирование для передачи на ПДУ 13 информационных команд, телеметрической информации и видеоизображения.
ТМ 5 комплектуется манипулятором (М) 31, сцепным устройством (СУ) 32, лебедкой с трапом (ЛТ) 33, откидным левым и правым бортом (ОЛБ и ОПБ) 34 и 35, набором ремней с крепежными петлями (HP) 36.
Это позволяет ТМ 5 осуществлять выполнение транспортирования возимой полезной нагрузки к месту назначения в условиях ведения боевых действий (перевозка боеприпасов, снаряжения, медикаментов и продовольствия). Перемещаемый груз при транспортировании фиксируется на УРП 2. Важнейшей функцией ТМ 5 является эвакуация раненых с места ведения боевых действий.
Дополнительное оборудование представлено в виде системы транспортирования (СТ) 37, состоящей из автомобиля высокой проходимости с кузовом-фургоном (КФ) 21 для транспортирования УРП 2 с функциональными модулями, ПДУ 13. Размещение оборудования в кузове-фургоне 21 позволяет защитить оборудование от атмосферных осадков, обеспечить его надежную фиксацию и при откидывании трапа выгрузку УРП 2 своим ходом.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании многофункционального робототехнического комплекса обеспечения боевых действий, обеспечивающего охрану или патрулирование гражданских и военных объектов, проведение боевых действий в городских и полевых условиях, ведение стрельбы по различным видам целей в дневных и ночных условиях, определение координат целей, ведение разведки местности и целей в дневных и ночных условиях, сбор и передачу разведывательной информации, доставку полезного груза до пункта назначения или его получение, эвакуацию раненых с мест ведения боевых действий или мест, представляющих потенциальную угрозу для человека при ЧС.
Многофункциональный робототехнический комплекс обеспечения боевых действий, содержащий самодвижущее транспортное средство с системой технического зрения, системой связи и передачи данных и пульт дистанционного управления, отличающийся тем, что он содержит группу универсальных роботизированных платформ, выполненных с возможностью комплектации различными функциональными модулями, устанавливаемыми в зависимости от планируемой боевой задачи: боевым дистанционно-управляемым модулем, транспортным модулем и модулем разведки, при этом каждая универсальная роботизированная платформа оснащена системой навигации и топопривязки и выполнена с возможностью обеспечения перемещения в дистанционном ручном режиме, в полуавтоматическом режиме с движением по траектории, задаваемой оператором путем ввода географических координат узловых точек маршрута, передачи информации о скорости и направлении движения, углах продольного и поперечного крена и текущих координат, и с движением по траектории, сохраненной ранее при движении в ручном режиме, с возможностью автоматического возвращения в исходную точку по пройденному маршруту и автоматического объезда препятствий, при этом пункт дистанционного управления выполнен с возможностью одновременного или последовательного управления всей группой универсальных роботизированных платформ с любыми из установленных на них функциональными модулями, при этом боевой дистанционно-управляемый модуль выполнен с возможностью обнаружения цели, ее автоматического сопровождения и поражения, с возможностью запоминания в произвольной последовательности нескольких неподвижных целей с последующим автоматическим наведением и открытием огня, модуль разведки выполнен с возможностью обнаружения цели и ее распознавания с определением координат и дальности, а транспортный модуль выполнен с возможностью транспортирования полезной нагрузки и ее фиксации на платформе.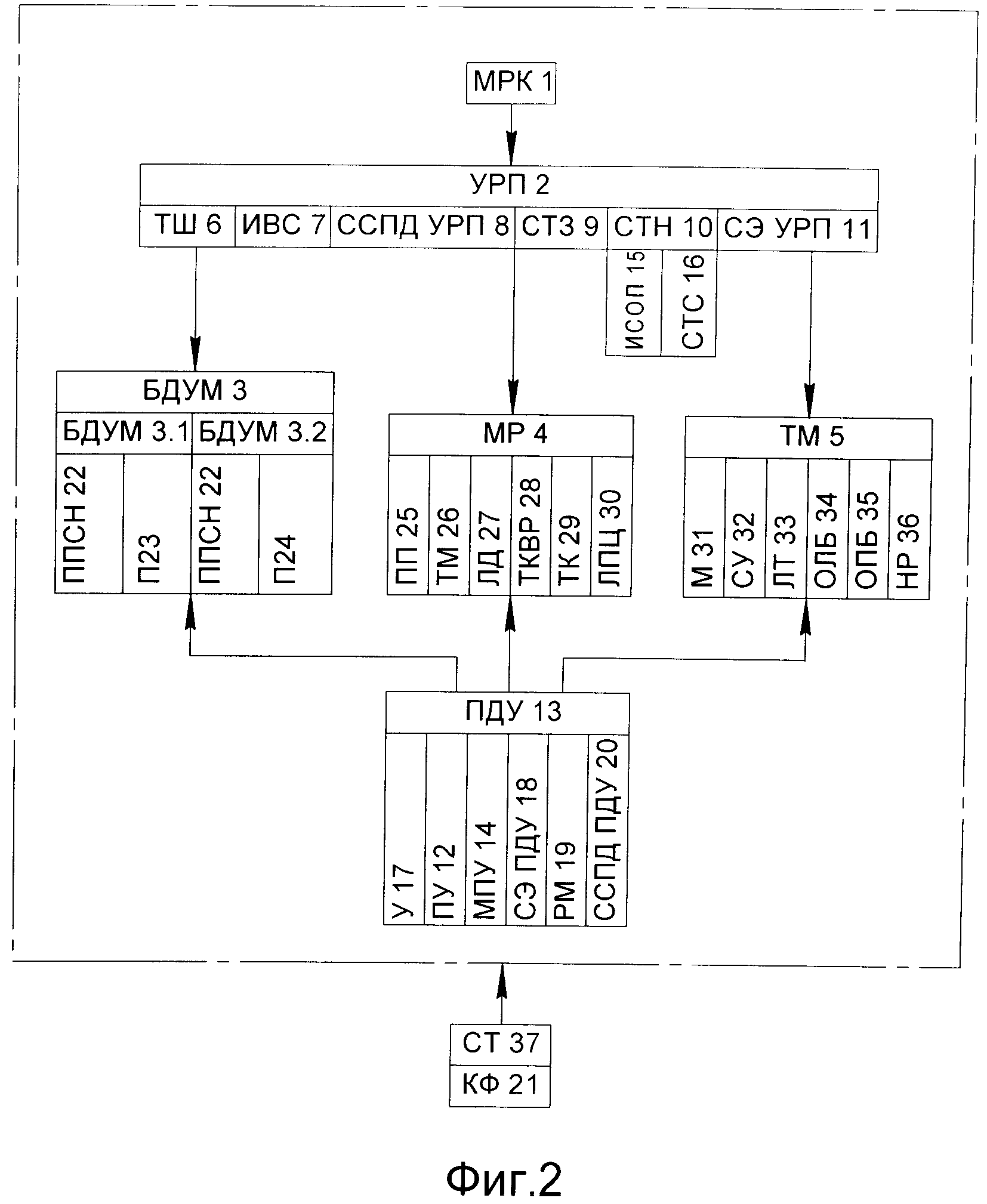
Способ термической обработки бойков и тяжелонагруженных штампов
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы
Способ термической обработки бойков и тяжелонагруженных штампов
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы

