Результат интеллектуальной деятельности: УСТРОЙСТВО НАВЕДЕНИЯ ДВУХОСНОГО ГИРОСТАБИЛИЗАТОРА
Вид РИД
Изобретение
Изобретение относится к системам автоматического регулирования, а конкретно к двухосным управляемым гиростабилизаторам оптической линии визирования, работающим на подвижных объектах и предназначенным для стабилизаци и наведения линии визирования.
Известен гиростабилизатор оптической линии визирования, описанный в патенте GB №1236807, МПК G02B, 23/00, содержащий наружную рамку, наклоненную относительно подвеса на постоянный угол и установленную в наружной рамке, внутреннюю рамку с зеркалом, исполнительные двигатели наружной рамки, внутренней рамки и подвеса, датчики углов каналов наружной и внутренней рамок, пульт ручного наведения на цель. При этом наводчик определяет координаты цели по азимуту и высоте, относительно системы координат связанной с основанием, учитывая постоянный угол наклона наружной рамки и угол поворота подвеса, вручную наводится по осям вращения наружной и внутренней рамок, что значительно ухудшает точность наведения.
Наиболее близким является устройство наведения гиростобилизатора, описанное в публикации Ривкин С.С. Стабилизация измерительных устройств на качающемся основании. - М.: Наука, 1978 г., стр.258-259, содержащее преобразователь координат, выполненный механическим, представленный вращающимися трансформаторами, преобразующими углы наведения на цель по азимуту и высоте, относительно основания канала подвеса в углы поворота наружной и внутренней рамок гиростабилизатора, масштабные вращающие трансформаторы, уравнивающие масштабы напряжений вращающихся трансформаторов, исполнительные двигатели и усилители каналов наружной и внутренней рамок. Но у данного устройства наведения низкая эффективность применения преобразователя координат, поскольку во вращающихся трансформаторах имеются дополнительные возмущающие моменты от вязкого трения и инерционных сил, обусловленные действием трехкомпонентной качки, см., например, Пельпор Д.С., Колосов Ю.А., Рахтеенко Е.Р. Расчет и проектирование гироскопических стабилизаторов. - М.: Машиностроение, 1972 г., стр.258-259.
Задачей изобретения является повышение эксплуатационных характеристик устройства наведения гиростабилизатора.
Технический результат - повышение точности наведения двухосного гиростабилизатора в подвесе.
Это достигается тем, что в устройстве наведения двухосного гиростабилизатора, содержащем исполнительные двигатели наружной и внутренней рамок, установленные на осях вращения наружной и внутренней рамок, усилители каналов наружной и внутренней рамок, выходы которых соединены с входами исполнительных двигателей наружной и внутренней рамок, выходные валы наружной и внутренней рамок, соединенные с выходами исполнительных двигателей наружной и внутренней рамок, преобразователь координат, выходы которого соединены с входами усилителей каналов наружной и внутренней рамок, в отличие от известного, преобразователь угловых координат выполнен электронным, устройство дополнено каналом подвеса, исполнительный двигатель которого установлен на основании канала подвеса, а вход исполнительного двигателя подвеса соединен с выходом усилителя канала подвеса, выходной вал канала подвеса при этом соединен с выходом исполнительного двигателя подвеса, кроме того, дополнительно введен пульт наведения с поступающими на вход сигналами углов наведения на цель по азимуту и высоте постоянного угла наклона наружной рамки и угла поворота выходного вала подвеса, выходы пульта наведения соединены с соответствующими входами электронного преобразователя координат, а вход усилителя канала подвеса соединен с соответствующим выходом пульта наведения.
Изобретение поясняется фиг.1 и фиг.2
На фиг.1 изображена принципиальная схема устройства наведения двухосного гиростабилизатора в подвесе.
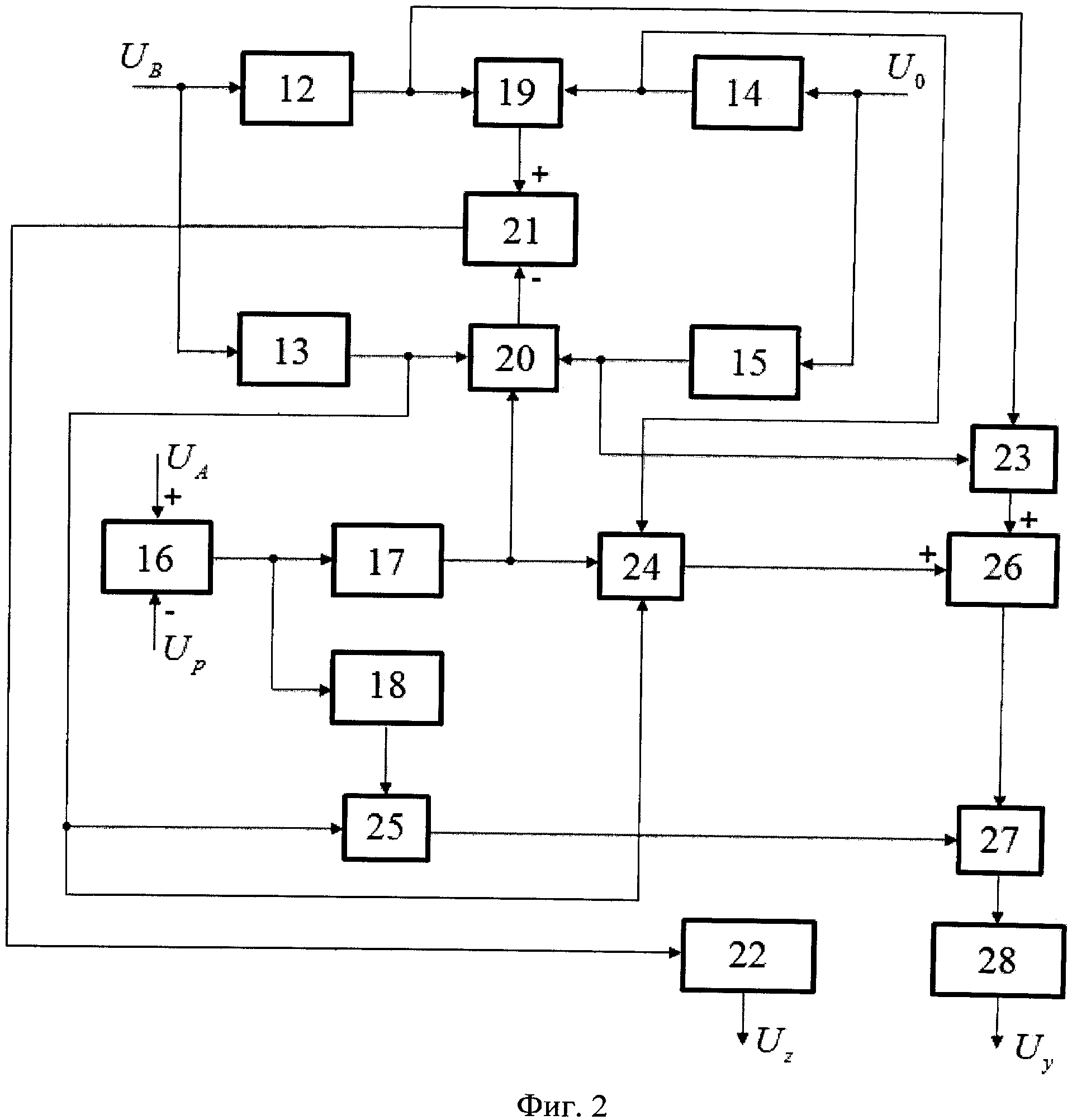
На фиг.2 изображена структурная схема вычислителя управляющих сигналов электронного преобразователя координат.
Устройство (фиг.1) содержит исполнительный двигатель 1 подвеса, установленный на основании канала подвеса с вращением выходного вала 2 подвеса на угол φp относительно оси Р, перпендикулярной основанию канала подвеса; исполнительный двигатель 3 наружной рамки с вращением выходного вала 4 наружной рамки на угол φy относительно оси Y, исполнительный двигатель 5 внутренней рамки с вращением выходного вала 6 внутренней рамки на угол φz относительно оси Z, пульт наведения 7, входы которого связаны с сигналами углов φA, φB наведения на цель по азимуту и высоте, постоянного угла φ0 наклона наружной рамки и угла φp поворота выходного вала подвеса, электронный преобразователь координат (ЭПК) 8, входы которого соединены с соответствующими выходами пульта наведения 7, усилитель 9 канала наружной рамки, вход которого соединен с первым выходом ЭПК 8, а выход усилителя 9 канала наружной рамки соединен с исполнительным двигателем 3 наружной рамки, усилитель 10 канала внутренней рамки, вход которого соединен с вторым выходом ЭПК 8, а выход усилителя 10 канала внутренней рамки соединен с исполнительным двигателем 5 внутренней рамки, усилитель 11 канала подвеса, вход которого соединен с четвертым выходом пульта наведения 7, а выход усилителя 11 канала подвеса соединен с исполнительным двигателем 1 подвеса.
Электронный преобразователь координат 8 (фиг.2) включает в себя вычислитель управляющих сигналов, который, в свою очередь, состоит из первого устройства вычисления синуса 12, первого устройства вычисления косинуса 13, второго устройства вычисления косинуса 14, второго устройства вычисления синуса 15, первого сумматора 16, третьего устройства вычисления косинуса 17, третьего устройства вычисления синуса 18, первого умножителя 19, второго умножителя 20, второго сумматора 21, вычислителя арксинуса 22, третьего умножителя 23, четвертого умножителя 24, пятого умножителя 25, третьего сумматора 26, делителя 27 и устройства вычисления арктангенса 28. При этом первый выход пульта наведения 7 соединен с входом первого устройства вычисления синуса 12 ЭПК 8 и входом первого устройства вычисления косинуса 13 ЭПК 8, второй выход пульта наведения 7 соединен с входом второго устройства вычисления косинуса 14 ЭПК 8 и входом второго устройства вычисления синуса 15 ЭПК 8, третий и четвертый выходы пульта наведения 7 соединены с входами первого сумматора 16 ЭПК 8, а выход первого сумматора 16 ЭПК 8 соединен с входом третьего устройства вычисления косинуса 17 ЭПК 8 и входом третьего устройства вычисления синуса 18 ЭПК 8, входы первого умножителя 19 ЭПК 8 соединены с выходом первого устройства вычисления синуса 12 ЭПК 8 и второго устройства вычисления косинуса 14 ЭПК 8, входы второго умножителя 20 ЭПК 8 соединены с выходами первого устройства вычисления косинуса 13 ЭПК 8, второго устройства вычисления синуса 15 ЭПК 8 и третьего устройства вычисления косинуса 17 ЭПК 8, выход первого умножителя 19 ЭПК 8 и выход второго умножителя 20 ЭПК 8 соединены с входами второго сумматора 21 ЭПК 8, а выход второго сумматора 21 ЭПК 8 соединен с входом вычислителя арксинуса 22 ЭПК 8, выход первого устройства вычисления синуса 12 ЭПК 8 и выход второго устройства вычисления синуса 15 ЭПК 8 соединены с входами третьего умножителя 23 ЭПК 8, выходы первого устройства вычисления косинуса 13 ЭПК 8, второго устройства вычисления косинуса 14 ЭПК 8 и третьего устройства вычисления косинуса 17 ЭПК 8 соединены с входами четвертого умножителя 24 ЭПК 8, выход первого устройства вычисления косинуса 13 ЭПК 8 и выход третьего устройства вычисления синуса 18 ЭПК 8 соединены с входами пятого умножителя 25 ЭПК 8, выход третьего умножителя 23 ЭПК 8 и выход четвертого умножителя 24 ЭПК 8 соединены с входами третьего сумматора 26 ЭПК 8, выход пятого умножителя 25 ЭПК 8 и выход третьего сумматора 26 ЭПК 8 соединены с входами делителя 27 ЭПК 8, а выход делителя 27 ЭПК 8 соединен с входом устройства вычисления арктангенса 28 ЭПК 8, выход устройства вычисления арксинуса 22 ЭПК 8 является первым выходом электронного преобразования координат 8 по каналу наружной рамки, а выход устройства вычисления арктангенса 28 ЭПК 8 является вторым выходом электронного преобразования координат 8 по каналу внутренней рамки.
Работает устройство следующим образом. В режиме наведения гиростабилизатора с помощью пульта наведения 7 задаются углы наведения на цель по азимуту φA и высоте φB, относительно системы координат связанной с основанием канала подвеса, постоянный угол φ0 наклона наружной рамки относительно подвеса и требуемый угол φp поворота выходного вала 2 подвеса. Пульт наведения 7 формирует электрические сигналы UA, UB, U0, пропорциональные заданным сигналам углов φA, φB, φ0, поступающие на ЭПК 8, и управляющий электрический сигнал Up, пропорциональный сигналу угла φр поворота выходного вала 2 подвеса, поступающий на электронный преобразователь координат 8 и усилитель 11 канала подвеса, который усиливает управляющий электрический сигнал Up и подает его на исполнительный двигатель 1 подвеса. Сигнал UB с первого выхода пульта наведения 7 подается на вход первого устройства вычисления синуса 12 ЭПК 8 и вход первого устройства вычисления косинуса 13 ЭПК 8. Первое устройство вычисления синуса 12 ЭПК8 формирует на выходе сигнал вида sin UB, который поступает на вход первого умножителя 19 ЭПК 8 и на вход третьего умножителя 23 ЭПК 8, первое устройство вычисления косинуса 13 ЭПК 8 формирует на выходе сигнал вида cos UB, который поступает на входы второго умножителя 20 ЭПК 8, четвертого умножителя 24 ЭПК 8 и пятого умножителя 25 ЭПК 8. Сигнал U0 со второго выхода пульта наведения 7 подается на вход второго устройства вычисления косинуса 14 ЭПК 8 и на вход второго устройства вычисления синуса 15 ЭПК 8. Второе устройство вычисления косинуса 14 ЭПК 8 формирует на выходе сигнал вида cos U0, который поступает на вход первого умножителя 19 ЭПК 8 и на вход четвертого умножителя 24 ЭПК 8, второе устройство вычисления синуса 15 ЭПК8 формирует на выходе сигнал вида sin U0, который поступает на вход второго умножителя 20 ЭПК 8 и на вход третьего умножителя 23 ЭПК 8. Сигнал UA с третьего выхода пульта наведения 7 и сигнал Up с четвертого выхода пульта наведения 7 подаются на входы первого сумматора 16 ЭПК 8. Первый сумматор 16 ЭПК 8 формирует на выходе сигнал вида UA-Up, который поступает на вход третьего устройства вычисления косинуса 17 ЭПК 8 и на вход третьего устройства вычисления синуса 18 ЭПК 8, третье устройство вычисления косинуса 17 ЭПК 8 формирует на выходе сигнал вида cos(UA-Up), который поступает на вход второго умножителя 20 ЭПК 8 и на вход четвертого умножителя 24 ЭПК 8, третье устройство вычисления синуса 18 ЭПК 8 формирует на выходе сигнал вида sin(UA-Up), который поступает на вход пятого умножителя 25 ЭПК 8. Сигнал с выхода третьего умножителя 23 ЭПК 8 и сигнал с выхода четвертого умножителя 24 ЭПК8 поступают на входы третьего сумматора 26 ЭПК 8. Третий сумматор 26 ЭПК 8 формирует на выходе сигнал вида cos U0 cos UB cos(UA-Up)+sin U0 sin UB, а пятый умножитель 25 ЭПК 8 формирует на выходе сигнал вида sin(UA-Up)cos UB. Сигналы с выхода третьего сумматора 26 ЭПК 8 и выхода пятого умножителя 25 ЭПК 8 поступают на входы делителя 27 ЭПК 8. Сигнал с выхода делителя 27 ЭПК 8 поступает на вход устройства вычисления арктангенса 28 ЭПК 8. Сигнал с выхода первого умножителя 19 ЭПК 8 и сигнал с выхода второго умножителя 20 ЭПК 8 поступают на входы второго сумматора 21 ЭПК 8. Сигнал с выхода второго сумматора 21 ЭПК 8 поступает на вход устройства вычисления арксинуса 22 ЭПК 8. Устройство вычисления арксинуса 22 ЭПК8 формирует на выходе управляющий сигнал вида UZ=arcsin(sin UB cos U0-cos UB cos(UA-Up)sin U0), который поступает на вход усилителя 10 канала внутренней рамки. Устройство вычисления арктангенса 28 ЭПК 8 формирует на выходе управляющий сигнал вида
 ,
,
который поступает на вход усилителя 9 наружной рамки. Усилитель 9 канала наружной рамки усиливает управляющий сигнал Uy и подает на исполнительный двигатель 3 наружной рамки, а усилитель 10 канала внутренней рамки усиливает управляющий сигнал Uz и подает на исполнительный двигатель 5 внутренней рамки.
Использование электронного преобразователя координат позволяет повысить точность наведения системы за счет отсутствия вращающихся трансформаторов и, следовательно, возмущающих моментов от вязкого трения и инерционных сил, обусловленных действием трехкомпонентной качки.
Устройство наведения двухосного гиростабилизатора, содержащее исполнительные двигатели наружной и внутренней рамок, установленные на осях вращения наружной и внутренней рамок, усилители каналов наружной и внутренней рамок, выходы которых соединены с входами исполнительных двигателей наружной и внутренней рамок, выходные валы наружной и внутренней рамок, связанные с выходами исполнительных двигателей наружной и внутренней рамок, преобразователь координат, выходы которого соединены с входами усилителей каналов наружной и внутренней рамок, отличающееся тем, что преобразователь угловых координат выполнен электронным, устройство дополнено каналом подвеса, исполнительный двигатель которого установлен на основании канала подвеса, а вход исполнительного двигателя подвеса связан с выходом усилителя канала подвеса, выходной вал канала подвеса при этом связан с выходом исполнительного двигателя подвеса, кроме того, дополнительно введен пульт наведения с поступающими на входы сигналами углов наведения на цель по азимуту и высоте, постоянного угла наклона наружной рамки и угла поворота выходного вала подвеса, выходы пульта наведения соединены с соответствующими входами электронного преобразователя координат, а вход усилителя канала подвеса соединен с соответствующим выходом пульта наведения.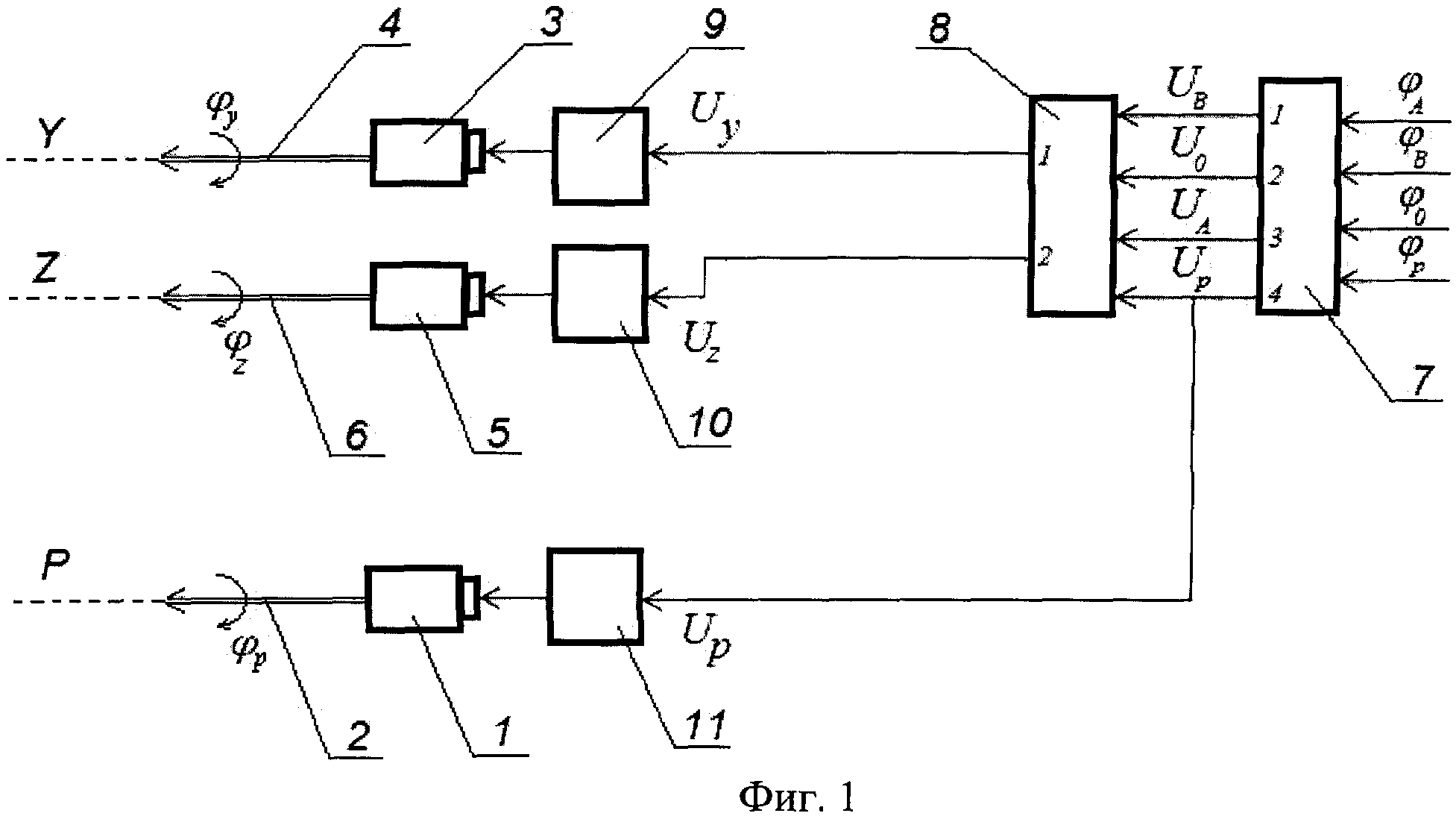
Лазерный целеуказатель
Объектив коллиматора
Устройство управления электромагнитным моментом двухфазного двигателя переменного тока
Объектив
Цифровой преобразователь угла
Оптическая тепловизионная система для средней ик-области спектра
Апохроматический объектив
Зеркально-линзовый объектив
Модуль лазерный
Система управления огнём
Лазерный целеуказатель
Объектив коллиматора
Устройство управления электромагнитным моментом двухфазного двигателя переменного тока
Объектив
Цифровой преобразователь угла
Оптическая тепловизионная система для средней ик-области спектра
Апохроматический объектив
Зеркально-линзовый объектив
Модуль лазерный
Система управления огнём

