Результат интеллектуальной деятельности: СПОСОБ ОТКАЗОУСТОЙЧИВОГО УМЕРЕНИЯ КРЕНА СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ
Вид РИД
Изобретение
Изобретение относится к области судостроения - автоматическому управлению угловым движением судна. Обычно в способах умерения крена судна используют пропорционально-дифференциальный «ПД» закона управления:

где: θ - сигнал угла крена судна, снимаемый с датчика угла крена,
δзд - заданное значение угла перекладки руля.
Зависимость (1) реализуют в регуляторе для управления рулевым приводом судна (АС СССР №468831, МПК B63b 39/00, приоритет 230474).
Известна система умерения угла крена с использованием «ПД» закона, реализованная в ЦНИИ «Аврора» в проекте 14310 «Мираж». Способ автоматической стабилизации угла крена базируется на использовании непосредственно измеряемых угловых координат судна (В.М. Корчанов, А.Г. Маковский. Автоматическое управление движением судов. Труды XXXIV Всероссийской конференции по управлению морскими судами и специальными аппаратами. Москва. ИПУ РАН. 2007. Стр.36-40).
Применение способа умерения качки судна базируется на использовании закона стабилизации крена по зависимости (1), в котором сигнал угла крена - θ формируется датчиком угла крена (измерение угла крена осуществляется с помехой и шумами, что приводит к перегрузкам рулевого привода при волнении на море). Каких-либо мер, повышающих надежность функционирования, особенно создание отказоустойчивости, в этих системах не предусмотрено.
Известен также способ автоматического управления угловым движением судна с применением «ПД» закона управления, который дополнен фильтром для формирования оценок фазовых координат судна (использован закона стабилизации по зависимости (1а) см. патент RU №222.31.97, БИ №4, 2004 г., принятый в качестве прототипа). «Аппаратура автоматического управления движением судна» содержит: датчик и задатчик курсового угла, датчик угла перекладки руля, рулевой привод, дифференциатор, фильтр, формирующий оценки фазовых координат углового движения судна (путевого угла). Сигнал оценки путевого угла с выхода фильтра вводят на вход регулятора-сумматора, к входу сумматора вводится также сигнал угла перекладки руля, с выхода датчика угла перекладки руля. На выходе сумматора формируется сигнал управления угловым движением судна, который вводится на вход рулевого привода. Сигнал оценки угла курса алгебраически суммируют с сигналом угла курса, снимаемого с датчика угла перекладки руля. Разность этих двух сигналов вводят на вход фильтра, на второй вход которого вводят сигнал угла перекладки руля с датчика угла перекладки руля. Таким образом, в рассматриваемом способе управления угловым движением судна формируют следующие сигналы для обеспечения автоматического управления движением судна по заданному углу. В задатчике курсового угла формируют сигнал - ϕзд=f(t), который вводят на вход сумматора, на второй вход которого вводят сигнал оценки угла курса - ϕ. Сигнал оценки - ϕ вводят с фильтра, в котором формируется оценка. На выходе сумматора-регулятора формируют сигнал заданного значения угла перекладки руля - δзд:

где ϕ, сигнал оценки угла курса, поступает с фильтра без высокочастотных шумов и помех,
δзд - сигнал заданного угла перекладки руля (с выхода сумматора, который вводят на вход рулевого привода).
Таким образом, в рассмотренных способах управления угловым движением судна формируют сигналы для обеспечения автоматического управления движением судна по заданному углу, используют либо зашумленные сигналы (по зависимости (1) непосредственно измеренные датчиком), либо с использованием оценок (1а) (см. патент RU №222.31.97, принятый в качестве прототипа). Достоинством рассматриваемого способа управления движением по углу курса судна, с использованием оценок угловых координат является снижение загрузки рулевого привода при сильном волнении на море. Однако известным способам управления движением судна присущи следующие недостатки:
- система управлением движением судна не является отказоустойчивой,
- отсутствуют встроенные средства контроля исправности источников информации,
- выход из строя датчиков фазового состояния судна приводит к аварийным ситуациям,
- выход из строя вычислительных сетей обработки входной информации (включая фильтрацию) также приводит к аварийным ситуациям.
Техническим результатом предлагаемого способа умерения крена судна является:
- введение второго фильтра, второго датчика крена и блока диагностики с коммутацией, что позволило повысить точность стабилизации при одновременном снижении загрузки рулевого привода (при сильном морском волнении);
- осуществлять контроль исправности системы умерения качки судна и перестраивать архитектуру системы автоматического управления движением (САУД) при выходе из строя датчика крена или сбое в сети формирования оценок угла крена (включая сбой в фильтре). Внедрение предлагаемого технического результата позволяет отнести такую систему умерения качки судна к разряду отказоустойчивой.
Технический результат - построение способа отказоустойчивого управления угловым движением судна достигается благодаря введению:
- системы контроля исправности измерительного канала,
- избыточного измерителя (второго датчика угла крена) и фильтра формирования оценки угла крена,
- блока диагностики с коммутацией каналов формирования оценки среднего значения угла крена, что приводит к повышению точности стабилизации, также и к снижению загрузки исполнительных органов (в условиях сильного морского волнения).
Способ отказоустойчивого умерения крена судна на подводных крыльях
В способе умерения крена судна на подводных крыльях используют блок датчиков углов поворота закрылков δпр (правого борта), δлев (левого борта), датчик угла крена θ1, блок дифференцирования, блок приводов закрылков δпр и δлев, блок регуляторов (сумматоров), на входы которого вводят сигналы:
- отклонения углов закрылков δпр (правого борта) и δлев (левого борта),
- производной от оценки угла крена d/dtθ.
На выходе блока регуляторов формируют сигналы управления углом поворота закрылков δпр и δлев, которые вводят в блок приводов закрылков δпр (правого борта) и δлев (левого борта). Для достижения предложенного технического результата используют: датчик скорости хода судна V (осуществляющий перестройку параметров математической модели углового движения суда, входящей в структуру фильтра формирования оценок угла крена), (второй) датчик угла крена θ2, блок среднего значения оценки угла крена θср, два блока диагностики оценки угла крена θ1, θ2 и два фильтра формирования оценок угла крена θ1 и θ2. На первый и второй входы обоих фильтров формирования оценки угла крена θ1 и θ2 соответственно вводят сигналы:
- отклонения углов закрылков δпр и δлев (c блока датчиков углов поворота закрылков δпр, δлев),
- скорости хода корабля - V (с датчика скорости хода судна).
На третий вход фильтра формирования оценки угла крена θ1 вводят сигнал угла крена θ1 (с датчика угла крена θ1).
На третий вход фильтра формирования оценки угла крена θ2 вводят сигнал (второго) угла крена θ2 (с (второго) датчика угла крена θ2). (В фильтрах оценки угла крена θ1 и θ2 формируют оценки угла крена θ1 и θ2, по методу Калмановской фильтрации, с использованием моделей углового движения судна по углу крена.)
На вход блока диагностики θ1 вводят сигналы:
- угла крена в θ1 с датчика угла крена θ1),
- оценки угла крена θ1 (с выхода фильтра оценки угла крена θ1).
На вход блока диагностики θ2 вводят сигналы:
- угла крена θ2 (с датчика угла крена θ2),
- оценки угла крена θ2 (с выхода фильтра оценки угла крена θ2).
В двух блоках диагностики θ1 информируют сигналы модулей разности: |θ1-θ1| и |θ2-θ2| (которые используют для формирования сигнала сбоя в линии выработки оценки угла крена θ1 или в линии выработки оценки (второго) угла крена θ2, в соответствии с условием (2а или 2б)).
1. В нормальных условия плавания (сбои отсутствуют) в блоках диагностики удовлетворяется условие (2):

где θ1 и θ2 - углы крена, поступающие с датчика крена θ1 и датчика крена θ2,
θ1 и θ2 - оценки угла крена, поступающие с фильтра оценки угла крена θ1 и с фильтра оценки угла крена θ2,
С1 - постоянная, устанавливается судоводителем.
Сигналы θ1 и θ2 - оценки угла крена (при выполнении условия (2)) вводят с двух блоков диагностики θ1 и θ2 в блок среднего значения оценки угла крена. В блоке среднего значения оценки угла крена формируют среднее значение оценки угла крена:
θср=(θ1+θ2)/2.
Сигнал среднего значения оценки угла крена θср из блока среднего значения оценки угла крена θср вводят на вход блока регуляторов и на вход блока дифференцирования. На выходе блока регуляторов формируют сигналы управления δпр.зд (1б) и δлев.зд (1в):


где θср., - сигнал оценки среднего значения угла крена (с выхода блока среднего значения оценки угла крена),
δпр, δлев - сигналы угла отклонения закрылков (с выхода блока датчиков углов поворота закрылков),
δпр.зд, δлев.зд - сигналы заданного угла отклонения закрылков (с выхода блока регуляторов вводят на вход блока приводов закрылков),
К1, К2, К3 - коэффициенты регулирования.
Сигналы d/dt δпр.зд, d/dt δлев.зд из блока регуляторов вводят в блок приводов закрылков, при этом формируется закон автоматического умерения крена судна (1б), (1в), с использованием закрылков.
2. В случае если произошел сбой в системе умерения угла крена - удовлетворяется условие (2а) (условие (2) не удовлетворяется):

Сигнал оценки угла крена θ2 с выхода блока диагностики θ2 отключают от блока среднего значения оценки угла крена. (Сигнал оценки угла крена θ1 с выхода блоке диагностики θ1 подключен к входу блока среднего значения оценки угла крена.) В блоке среднего значения оценки угла крена формируют среднее значение оценки угла крена:
θср=θ1.
Сигнал θср из блока среднего значения оценки угла крена поступает на вход блока регуляторов, где формируют сигналы управления которые вводят в блок приводов закрылков δпр.зд (привод правого закрылка (1б)) и δлев.зд (привод левого закрылка (1в)).
Сигналы δпр.зд, δлев.зд из блока регуляторов вводят в блок приводов закрылков, при этом формируется закон автоматического умерения крена судна (1б), (1в), с использованием закрылков.
3. В случае если произошел сбой в системе умерения угла крена - удовлетворяется условие (2б) (условие (2) и условие (2а) не удовлетворяются):

Сигнал оценки угла крена δ1 (в блоке диагностики θ1) отключают от блока среднего значения оценки угла крена. (Выходной сигнал оценки угла крена θ2 в блоке диагностики θ2 подключен к входу блока среднего значения оценки угла крена.) В блоке среднего значения оценки угла крена формируют среднее значение оценки угла крена:
θср=θ2.
Сигнал θср из блока среднего значения оценки угла крена поступает на вход блока регуляторов, где формируют сигналы управления, которые вводят в блок приводов закрылков δпр.зд (привод правого закрылка (1б)) и δлев.зд (привод левого закрылка (1в)).
Отказоустойчивая система умерения крена судна на подводных крыльях (см чертеж)
Рассмотрим отказоустойчивую систему умерения крена судна на подводных крыльях, реализованную в соответствии с предложенным способом (см. чертеж).
На чертеже приведена блок-схема отказоустойчивой системы умерения крена судна на подводных крыльях. Система содержит: блок датчиков углов поворота закрылков δпр, δлев - 1, датчик угла крена θ1 - 2, датчик (второго) угла крена в θ2 - 3, блок привода закрылков δпр, δлев - 4, блок регуляторов δпр, δлев - 5, блок дифференцирования - 6, фильтр оценки угла крена θ1 - 7, фильтр оценки угла крена θ2 - 8, датчик скорости хода V - 9, блок диагностики оценки угла крена θ1 - 10, блок диагностики оценки угла крена θ2 - 11, блок среднего значения оценки угла крена - 12, объект управления - судно.
При построении такой системы могут использоваться серийно выпускаемые датчики углов поворота с точностью измерения не хуже 1,5%, штатные привода горизонтальных закрылков, измерители скорости хода судна. Фильтр оценок угла крена с электронной динамической моделью углового поворота судна по крену, блоки диагностики оценок угла крена и блок регуляторов могут быть реализованы с применением элементов аналоговой или цифровой вычислительной техники.
Система умерения крена судна на подводных крыльях позволяет снизить бортовую качку судна, не приводя к существенной перегрузке приводов закрылков. Облегченный режим работы приводов закрылков даже при сильном волнении на море достигается благодаря использованию в законах стабилизации (1б), (1в) сигнала оценки среднего угла крена - θ.
Фильтры оценки угла крена содержат электронную динамическую модель углового поворота судна по крену - 7, 8. Для формирования сигналов оценки угла крена на вход фильтров 7, 8 вводят сигналы:
- углов закрылков δпр, δлев из блока датчиков углов поворота закрылков - 1,
- скорости хода - V с выхода датчика скорости судна - 9 (для корректировки параметров электронной динамическая модель углового поворота судна по крену,
- угла крена - θ (измеренного) с выхода датчика угла крена - 2 (подключен только на вход фильтра оценки угла крена θ2 - 7),
- угла крена - θ (измеренного) с выхода датчика угла крена - 3 (подключен только на вход фильтра оценки угла крена - θ1 - 8).
К первому входу блока диагностики - 10 подключен выход датчика угла крена - 2, а к второму - выход фильтра - 7 для формирования модуля разности сигналов |θ1-θ1|.
К первому входу блока диагностики - 11 подключен выход датчика угла крена - 3, а к второму - выход фильтра - 8 для формирования модуля разности сигналов |θ2-θ2|.
С выходов блоков диагностики 10 и 11 модули сигналов: |θ1-θ1| и |θ2 θ2| вводят в блок среднего значения оценки угла крена - 12, где:
- при удовлетворении зависимости (2), среднее значение оценки угла крена будет
θср.=(θ1+θ2)/2,
- при удовлетворении зависимости (2а) среднее значение оценки угла крена будет
θср=θ1,
- при удовлетворении зависимости (2б) среднее значение оценки угла крена будет
θср=θ2,
Среднее значение оценки угла крена - θср с выхода блока среднего значения оценки угла крена - 12 поступает на вход блока регуляторов - 5 и на вход блока дифференцирования. При этом в блоке приводов закрылков - 4 формируется закон управления:
- правыми закрылками в соответствии с зависимостью (1б),
- левыми закрылками в соответствии с зависимостью (1в).
Способ отказоустойчивого умерения крена судна на подводных крыльях, в котором используют: блок датчиков углов поворота закрылков δ, δ, датчик угла крена θ, блок дифференцирования, блок приводов закрылков δ, δ, блок регуляторов, на входы которого вводят сигналы:- отклонения углов закрылков δ и δ (из блока датчиков углов поворота закрылков δ, δ);- производной оценки угла крена d/dt (из блока дифференцирования),отличающийся тем, что используют: датчик скорости хода судна V, датчик угла крена θ, два блока диагностики оценки угла крена , и два фильтра оценки угла крена , , на первые входы которых вводят сигналы:- отклонения углов закрылков δ и δ (с блока датчиков углов поворота закрылков δ и δ);- скорости хода судна V (с датчика скорости хода судна);на второй вход фильтра оценки угла крена фильтра вводят сигнал угла крена - θ (с датчика угла крена θ), на второй вход фильтра оценки угла крена вводят сигнал угла крена - θ (с датчика угла крена θ), в двух фильтрах оценки угла крена и формируют оценки угла крена и соответственно , которые вводят соответственно на первые входы двух блоков диагностики оценки угла крена и , на второй вход блока диагностики оценки угла крена вводят сигнал оценки угла крена (с выхода фильтра оценки угла крена ) и формируют модуль разности |θ- |, на второй вход блока диагностики оценки угла крена вводят сигнал оценки угла крена (с выхода фильтра оценки угла крена ) и формируют модуль разности |θ- |, из двух блоков диагностики оценки угла крена и вводят в блок среднего значения оценки угла крена и , в блоке среднего значения оценки угла крена формируют сигнал среднего значения оценки угла крена путем выбора одного из трех возможных условий (2), или (2а), или (2б):|θ- |<С1 и |θ- |<С1 (2),|θ- |≤С1 и |θ- |>С1 (2а),|θ- |>С1 и |θ- |≤С1 (2б),при удовлетворении условия (2) формируют сигнал среднего значения оценки угла крена: =( + )/2, при удовлетворении условия (2а) формируют сигнал среднего значения оценки угла крена:θ=θ,при удовлетворении условия (2б) формируют сигнал среднего значения оценки угла крена: = сигнал среднего значения оценки угла крена - из блока среднего значения оценки угла крена водят на вход блока регуляторов и блока дифференцирования, в блоке регуляторов формируют закон стабилизации угла крена:d/dt δ=К1 + К2 d/dt - К3 d/dt δ (1б),d/dt δ=-К1 - К2 d/dt - К3 d/dt (1в),где: - сигнал оценки среднего значения угла крена,δ, δ - сигналы заданного угла поворота правого и левого закрылка,сигналы d/dt δ, d/dt δ вводят на вход блока приводов закрылков,K, К, К - коэффициенты регулирования,сигналы d/dt δ и d/dt δ с выхода блока регуляторов вводят на вход блока приводов закрылков δ, δ для обеспечения автоматического умерения крена судна на подводных крыльях.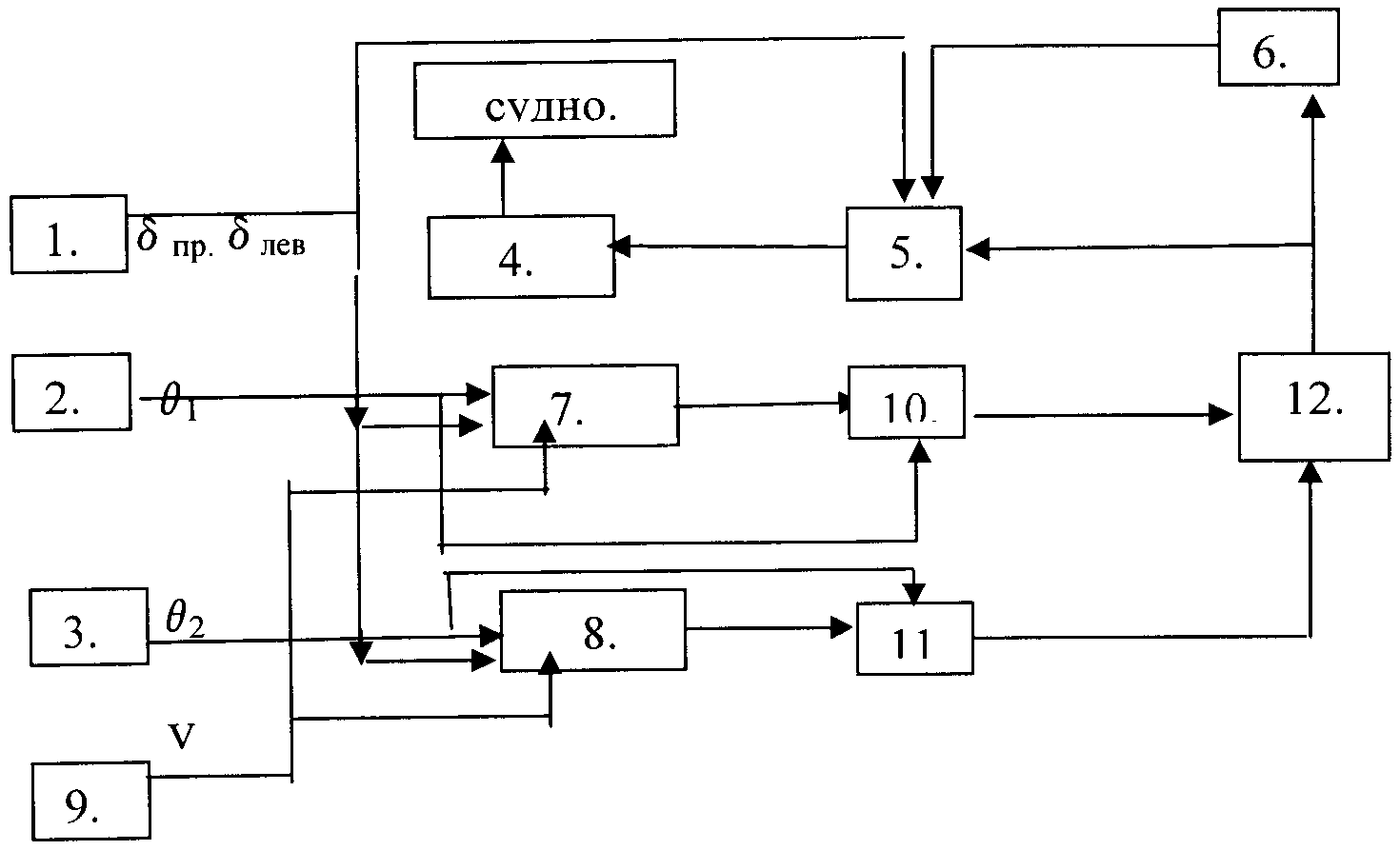
Способ определения положения границ раздела между компонентами трехкомпонентной среды в емкости
Способ измерения массового расхода жидких сред
Устройство для измерения массового расхода жидких сред
Устройство для бесконтактного измерения диаметра провода
Способ измерения уровня жидкости и сыпучих сред в емкости
Устройство для измерения электрического тока
Способ измерения физических свойств жидкости
Способ контроля сварных швов труб
Способ диагностики механизмов, агрегатов и машин на основе оценки микровариаций вращения вала
Радиоволновый способ измерения путевой скорости и угла сноса летательного аппарата
Способ определения положения границ раздела между компонентами трехкомпонентной среды в емкости
Способ измерения массового расхода жидких сред
Устройство для измерения массового расхода жидких сред
Устройство для бесконтактного измерения диаметра провода
Способ измерения уровня жидкости и сыпучих сред в емкости
Устройство для измерения электрического тока
Способ измерения физических свойств жидкости
Способ контроля сварных швов труб
Способ диагностики механизмов, агрегатов и машин на основе оценки микровариаций вращения вала
Радиоволновый способ измерения путевой скорости и угла сноса летательного аппарата

