Результат интеллектуальной деятельности: СИСТЕМА С ПРИВОДОМ ОТ ЭЛЕКТРОДВИГАТЕЛЕЙ ДЛЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ЭЛЕМЕНТА, СПОСОБ УПРАВЛЕНИЯ ТАКОЙ СИСТЕМОЙ И СПОСОБ ТЕСТИРОВАНИЯ ТАКОЙ СИСТЕМЫ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе с приводом от электродвигателей для перемещения элементов, например к системе с приводом от электродвигателей для перемещения элементов, предназначенной для перемещения подвижной поверхности, управляющей полетом воздушного судна, такой как руль направления. Настоящее изобретение предлагает также способ управления такой системой и способ тестирования такой системы.
Уровень техники
Примером такой системы с приводом от электродвигателей для перемещения подвижного элемента является система, содержащая два привода, соединенных с подвижным элементом, так что каждый из этих приводов рассчитан на то, чтобы самостоятельно приводить в движение подвижный элемент. Система имеет также центральный блок управления, соединенный с двумя приводами, чтобы передавать уставки позиции каждому из приводов. Во время работы центральный блок управления передает уставку позиции одному из приводов, называемому главным приводом, который в ответ на уставку позиции генерирует усилие для перемещения подвижного элемента. Второй привод, именуемый аварийным приводом, в это время выключен и питания не получает. В случае выхода главного привода из строя центральный блок управления передает уставку позиции аварийному приводу, который занимает место главного привода для перемещения подвижного элемента.
Тем не менее, поскольку срок службы привода непосредственно связан с величинами усилий, которые он должен развивать, главный привод быстро изнашивается, так как в нормальном режиме работы он перемещает подвижный элемент в одиночку. По этой причине в системе может быть предусмотрена работа каждого привода поочередно в качестве главного привода и в качестве аварийного привода, однако это усложняет управление работой приводов. Кроме того, сохраняется необходимость так рассчитывать каждый привод, чтобы он мог развивать максимальное усилие в течение очень продолжительных периодов времени, вследствие чего эти приводы оказываются относительно тяжелыми и громоздкими.
Более того, когда главный привод действует в нормальном режиме работы, аварийный привод не работает и вследствие этого создает в месте своего соединения с подвижным элементом усилие, противодействующее усилию, развиваемому главным приводом для перемещения подвижного элемента. Поэтому главный привод должен быть рассчитан таким образом, чтобы быть способным преодолевать указанное противодействующее усилие без каких-либо последствий для перемещения подвижного элемента.
В документах FR 2908107, US 2004/075020, EP 0864491 и WO 2007/002311 описаны системы с приводом от электродвигателей для перемещения подвижного элемента, так что каждая система содержит два привода, каждый из которых имеет узел для соединения этого привода с подвижным элементом. Каждая система содержит центральный блок управления, который в номинальной ситуации передает управляющую уставку одному из приводов, так что этот привод осуществляет перемещение подвижного элемента в одиночку. В более критической ситуации, в случае, например, турбулентности, противодействующей перемещению подвижного элемента, центральный блок управления передает управляющую уставку каждому приводу, так что оба привода работают одновременно для перемещения подвижного элемента. Таким образом, использование только одного или обоих приводов зависит только от уровня мощности, необходимого для перемещения подвижного элемента.
Раскрытие изобретения
Задачей настоящего изобретения является создание системы с приводом от электродвигателей для перемещения подвижного элемента, исключающий отмеченные выше проблемы по меньшей мере частично.
Для достижения указанной цели настоящее изобретение предлагает систему с приводом от электродвигателей для перемещения подвижного элемента, содержащую по меньшей мере два привода, каждый из который оснащен узлом для соединения этого привода с подвижным элементом и рассчитан на то, чтобы самостоятельно перемещать этот подвижный элемент, и центральный блок управления, соединенный с этими двумя приводами с целью передачи уставки позиции одному или другому приводу.
Согласно настоящему изобретению система дополнительно содержит устройство управления, предназначенное для одновременного управления указанными двумя приводами с точки зрения развиваемых ими усилий в ответ на уставку позиции, переданную одному из приводов.
Устройство управления служит для распределения усилия, которое нужно развить для перемещения подвижного элемента, между двумя приводами таким образом, чтобы ни один из этих приводов не был слишком сильно перегружен по сравнению с другим приводом. Кроме того, в случае выхода одного из приводов из строя другой привод способен самостоятельно перемещать подвижный элемент.
Таким образом, сроки службы этих приводов становятся по существу одинаковыми. При этом габариты и масса приводов оказываются меньше, чем габариты и масса приводов в известной системе с приводом от электродвигателей для перемещения подвижного элемента, использующей только один привод, поскольку требование выбирать характеристики приводов с учетом усталостного износа становится в меньшей степени ограничивающим.
Другое преимущество состоит в том, что приводы меньше нагреваются, чем в известных системах.
Предпочтительно система согласно настоящему изобретению позволяет двум приводам совместно использовать уставку позиции, поступающую от центрального блока управления, не требуя для этого обязательного изменения алгоритма работы уже существующего центрального блока управления, который обычно соединен с двумя приводами, чтобы в нормальной ситуации передавать уставку позиции только одному из этих приводов. Согласно настоящему изобретению уставку позиции, генерируемую для передачи одному из приводов, совместно используют путем преобразования в первую уставку усилия и вторую уставку усилия.
Настоящее изобретение предлагает также способ управления такой системой и способ тестирования такой системы.
Краткое описание чертежей
Настоящее изобретение может быть лучше понято в свете последующего описания конкретного, неограничивающего варианта настоящего изобретения.
Ссылки будет даны на прилагаемые чертежи, на которых:
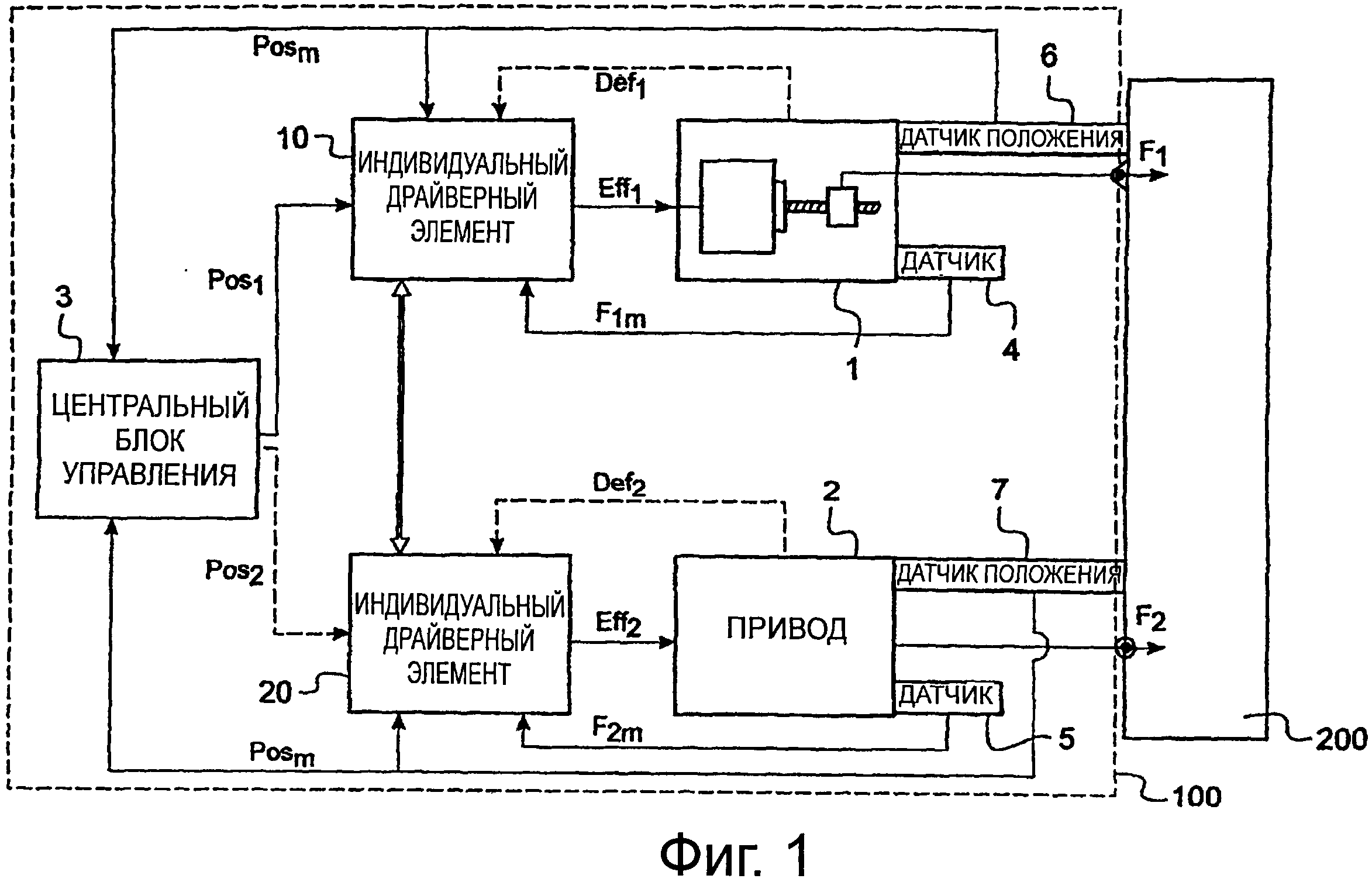
Фиг.1 представляет схематичный вид системы с приводом от электродвигателей для перемещения подвижного элемента согласно настоящему изобретению;
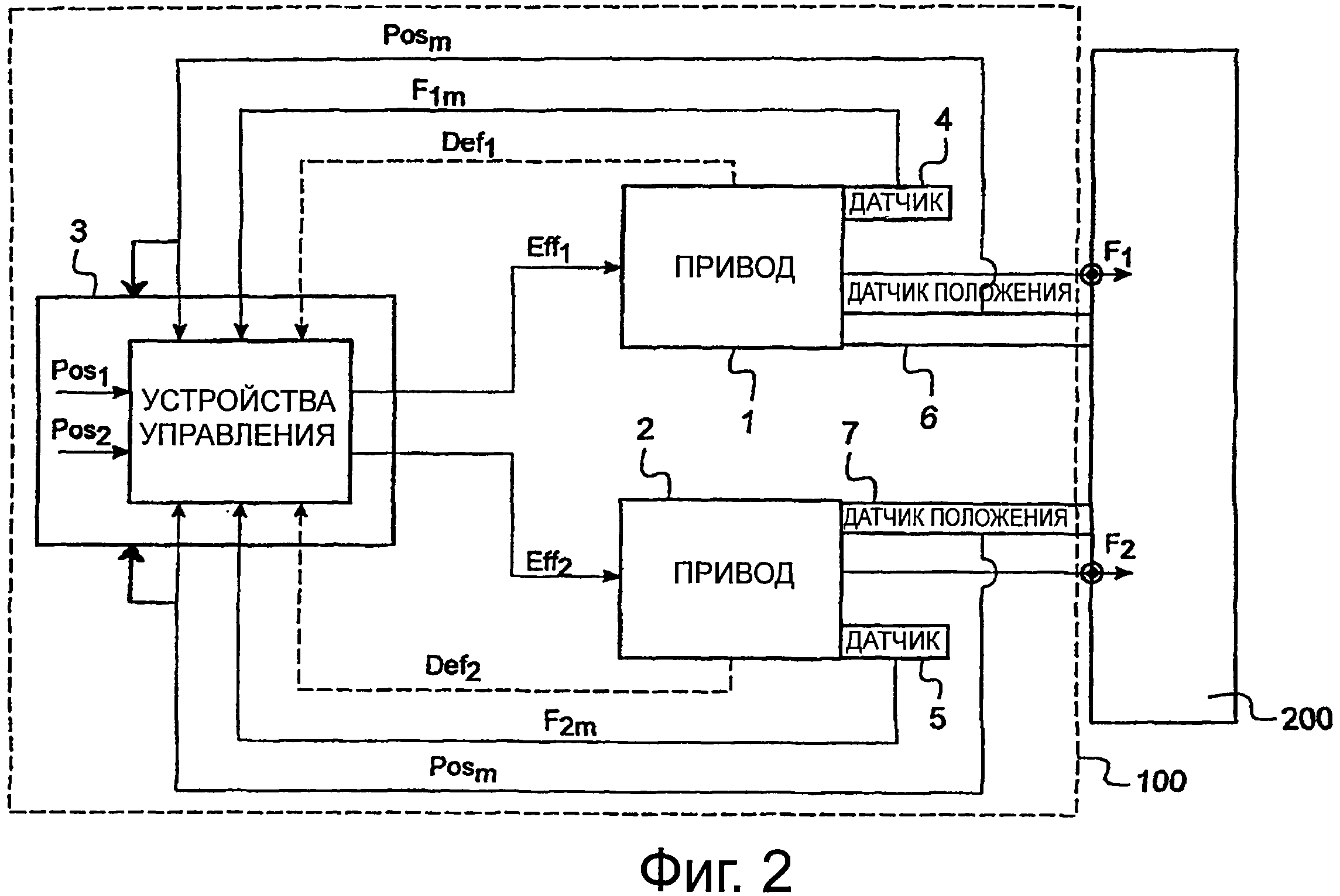
Фиг.2 представляет схематичный вид системы с приводом от электродвигателей для перемещения подвижного элемента согласно второму варианту настоящего изобретения; и
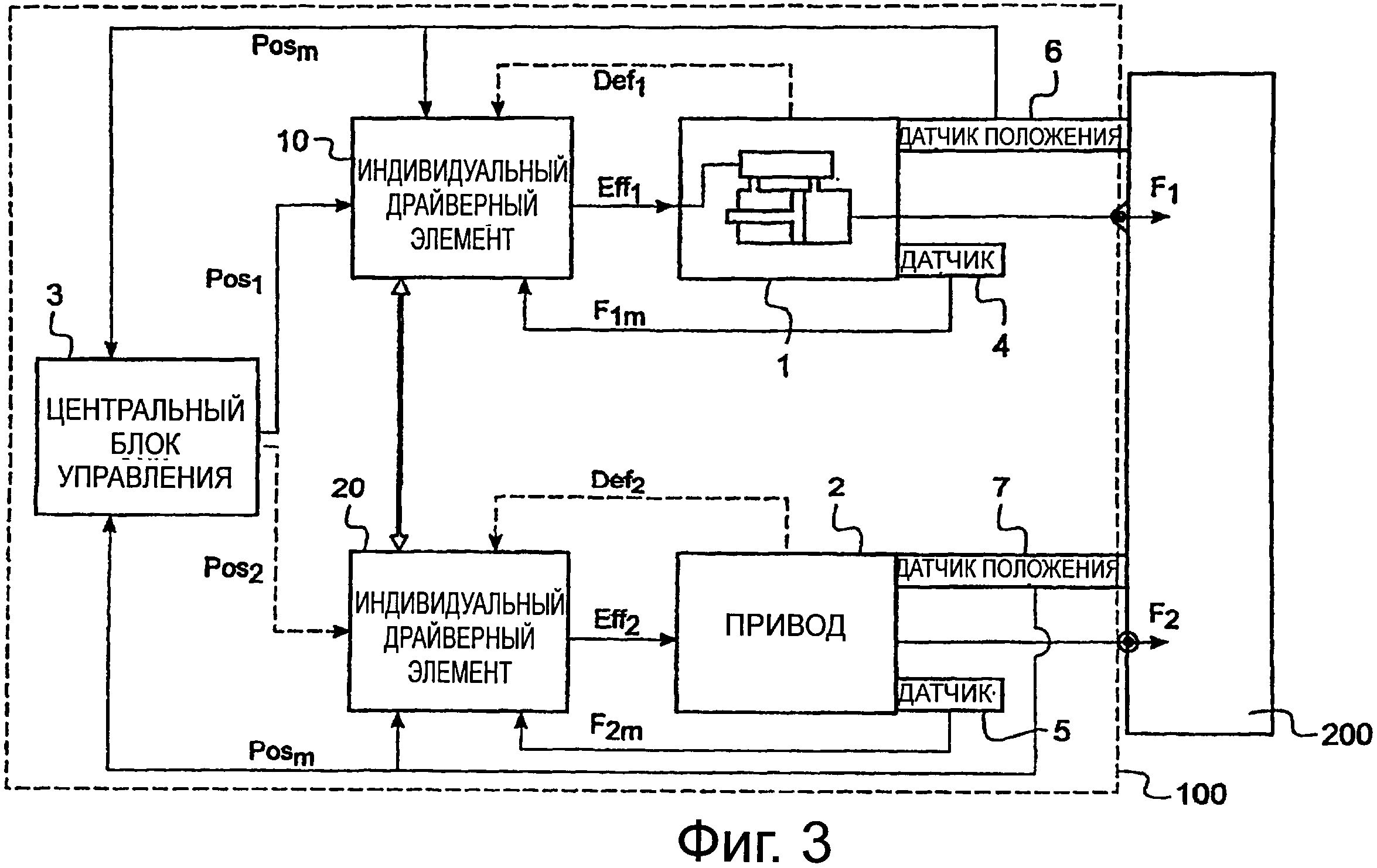
Фиг.3 представляет схематичный вид системы с приводом от электродвигателей для перемещения подвижного элемента согласно третьему варианту.
Осуществление изобретения
В системах, показанных на Фиг.1 и 2, в рассматриваемом примере, относящемся к воздушному судну, система 100 с приводом от электродвигателей для перемещения подвижного элемента служит для передачи перемещения от пилотского органа управления, такого как ручка управления, подвижному элементу 200, такому как руль направления. Эта система для перемещения содержит первый привод 1 и второй привод 2. В этом примере каждый привод содержит электродвигатель, например бесколлекторный двигатель, имеющий выходной вал, приводящий в действие передачу винт-гайка, так что создаваемое двигателем вращение винта вызывает прямолинейное перемещение гайки без вращения. Гайка из состава передачи винт-гайка в каждом приводе 1, 2 позволяет прикрепить соответствующий привод к подвижному элементу 200. Каждый привод 1, 2 рассчитан так, чтобы он мог самостоятельно перемещать подвижный элемент.
Первый привод 1 ассоциирован с первым датчиком 4 для измерения развиваемого первым приводом 1 усилия, прикладываемого к подвижному элементу 200 с целью перемещения этого подвижного элемента 200. Аналогично, второй привод 2 ассоциирован со вторым датчиком 5 для измерения развиваемого первым приводом 2 усилия, прикладываемого к подвижному элементу 200. В рассматриваемом примере датчики 4 и 5 представляют собой датчики осевого усилия, встроенные в систему 100.
Эта система 100 содержит также центральный блок 3 управления, соединенный с первым приводом 1 и со вторым приводом 2, так что этот центральный блок 3 управления может передавать соответствующие уставки Pos1, Pos2 позиции каждому из приводов.
Система 100 содержит также по меньшей мере один датчик положения для определения положения подвижного элемента 200 с целью измерить действительное положение этого подвижного элемента 200. Предпочтительно система 100 имеет два датчика 6 и 7 положения, так что оба датчика измеряют действительное положение подвижного элемента 200, с целью обеспечить большее резервирование в системе 100. При работе обоих датчиков положения в нормальных условиях результат измерений, выполненных первым датчиком 6 из двух датчиков положения, по существу равен результату измерений, выполненных вторым датчиком 7 из этих двух датчиков положения. В случае выхода одного из датчиков положения из строя другой датчик положения может продолжать работать самостоятельно, чтобы передавать информацию, представляющую положение подвижного элемента 200.
Центральный блок 3, таким образом, соединен с двумя датчиками 6 и 7 положения подвижного элемента. В рассматриваемом примере первый датчик 6 из двух датчиков положения встроен в первый привод 1 и второй датчик 7 из двух датчиков положения встроен во второй привод 2.
В системе, показанной на Фиг.1, в первом варианте, когда оба привода 1, 2 работают в нормальных условиях, центральный блок 3 управления передает уставку Pos1 позиции только первому приводу 1, который здесь считается «ведущим» приводом. В случае выхода первого привода 1 из строя центральный блок 3 управления опирается на второй привод 2, который здесь считается «ведомым», для перемещения подвижного элемента 200. С этой целью центральный блок 3 управления передает уставку Pos2 позиции второму приводу.
Согласно настоящему изобретению система 100 содержит устройства управления, служащие для управления величинами усилий, развиваемых обоими приводами 1 и 2, одновременно в ответ на уставку позиции, заданную для одного из приводов посредством центрального блока 3 управления. В рассматриваемом варианте устройство управления содержит первый и второй индивидуальные драйверные элементы 10, 20, соединенные с первым и вторым приводами 1, 2 соответственно. Эти два драйверных элемента 10, 20 соединены также с центральным блоком 3 управления, с соответствующими датчиками 4, 5 усилий и с соответствующими датчиками 6, 7 положения. Индивидуальные драйверные элементы 10, 20 встроены в систему 100 таким образом, чтобы поддерживать связь один с другим.
Во время работы, начиная от команды переместить подвижный элемент 200, поступившей от одного из пилотских управляющих элементов, центральный блок 3 управления генерирует уставку Pos1 позиции для первого привода 1.
Первый индивидуальный драйверный элемент 10 затем преобразует уставку Pos1 позиции в уставку усилия и при этом поддерживает связь со вторым индивидуальным драйверным элементом 20, так что эти первый и второй драйверные элементы 10, 20 действуют одновременно для генерации двух индивидуальных уставок Eff1, Eff2 усилий соответственно для первого привода 1 и второго привода 2.
Индивидуальные уставки Eff1, Eff2 усилий вычисляют таким образом, чтобы первый и второй приводы развивали соответствующие индивидуальные усилия F1, F2, действующие на подвижный элемент 200, причем сумма этих индивидуальных усилий, т.е. F1+F2, соответствует полному усилию, которое необходимо приложить, чтобы достигнуть положения, заданного уставкой Pos1 позиции, а сами усилия F1 и F2 по существу равны одно другому. Предпочтительно и для этой цели в процессе всего перемещения подвижного элемента измеряют положение Posm этого подвижного элемента одновременно обоими датчиками 6, 7 положения. Указанные два индивидуальных драйверных элемента 10, 20 с использованием измеренного положения Posm и уставки Pos1 позиции определяют две индивидуальные уставки Eff1, Eff2 усилий с учетом расхождения между положением, обозначенным уставкой Pos1 позиции, и измеренным положением Posm, когда эти два привода 1, 2 прикладывают соответственно индивидуальные усилия F1 и F2 соответственно к подвижному усилию 200. Регулируя эти индивидуальные усилия F1 и F2, можно получить сумму F1+F2 индивидуальных усилий, соответствующую полному усилию, которое нужно приложить, чтобы достигнуть положения, обозначенного уставкой Pos1 позиции, по меньшей мере в нормальных условиях работы системы 100.
Предпочтительно центральный блок 3 получает также измеренное положение Posm подвижного элемента 200. Если есть разница между положением, обозначенным уставкой Pos1 позиции, которую первоначально сформировал центральный блок 3, и измеренным положением, этот центральный блок 3 может изменить уставку Pos1 позиции с целью уменьшить указанную разницу.
Следует понимать, что, если какой-либо один из двух датчиков 6 или 7 положения выходит из строя, другой датчик положения может продолжать передавать информацию, представляющую положение подвижного элемента 200, центральному блоку 3 и одному из двух индивидуальных драйверных элементов, который затем входит в связь с другим индивидуальным драйверным элементом с целью совместного использования этой информации.
В рассматриваемом примере в ходе всего перемещения подвижного элемента 200 первый датчик 4 измеряет усилие F1m прикладываемое первым приводом 1 к подвижному элементу 200. Аналогично, в ходе всего перемещения подвижного элемента 200 второй датчик 5 измеряет усилие F2m, прикладываемое вторым приводом 2 к подвижному элементу 200. Аналогично, на основе измеренных величин усилий F1m, F2m первый и второй индивидуальные драйверные элементы 10, 20 определяют индивидуальные уставки Eff1, Eff2 усилий, обеспечивающие уменьшение расхождения между положением, соответствующим уставке Pos1 позиции, и измеренным положением Posm, когда указанные два привода 1, 2 прикладывают соответственно усилия F1 и F2 к подвижному элементу 200.
Тем не менее, возможна ситуация, когда один из приводов может развить лишь ограниченное по величине усилие, не позволяющее достигнуть заданной этому приводу уставки усилия. Эта неисправность может быть обнаружена, например, датчиком усилия. В таких обстоятельствах неисправный привод - первый привод 1 или второй привод 2 - передает сигнал неисправности - Def1 или Def2 - соответствующему индивидуальному драйверному элементу 10, 20. После этого драйверные элементы 10, 20 учитывают такую неисправность при генерации индивидуальных уставок Eff1, Eff2 усилий, позволяющих получить полное усилие, которое необходимо и возможно развить, чтобы достигнуть положения, соответствующего уставке Pos1 позиции.
В предпочтительном варианте сигнал неисправности может быть также передан затронутым приводом центральному блоку 3 управления, который принимает во внимание этот сигнал, чтобы после этого опираться на исправный привод с целью перемещения подвижного элемента 200. Если первый привод 1 вышел из строя, тогда центральный блок 3 управления опирается на второй привод 2, а система работает идентично ситуации, когда уставку позиции передают первому приводу 1.
Предпочтительно устройства управления организованы таким образом, что система 100 позволяет сохранить программирование центрального блока 3 управления идентичным программированию, применяемому в известных системах. Таким образом, центральный блок управления генерирует уставку позиции для одного из приводов, как в известных системах. Согласно настоящему изобретению устройства управления поддерживают связь одно с другим, чтобы совместно использовать эту уставку позиции и преобразовать ее в уставки усилий для различных приводов. Эти устройства управления, таким образом, программируют независимо от программирования центрального блока 3 управления, который генерирует уставку позиции для одного привода.
Другое преимущество состоит в том, что два индивидуальных драйверных элемента 10, 20 контролируют состояния обоих приводов 1, 2 так же, как это делает центральный блок управления, тем самым увеличивая надежность системы 100. Это создает двойной контроль - как с общей точки зрения в центральном блоке 3 управления, так и с локальной точки зрения в устройствах управления.
На Фиг.2 показан второй вариант системы с приводом от электродвигателей для перемещения подвижного элемента согласно настоящему изобретению. В этом варианте устройства управления встроены непосредственно в указанный центральный блок 3 управления. В этом случае центральный блок 3 управления программируют для осуществления функций индивидуальных драйверных элементов, описанных применительно к первому варианту.
Во время работы, начиная с команды переместить подвижный элемент 200, пришедшей от одного из пилотских органов управления, такого как ручка управления, центральный блок 3 управления начинает вычислять уставку Pos1 позиции для первого привода 1. Затем на основе этой уставки Pos1 позиции устройства управления одновременно генерируют две индивидуальные уставки Eff1, Eff2 усилий соответственно для первого и второго приводов 1 и 2. Эти индивидуальные уставки Eff1, Eff2 усилий вычисляют таким образом, чтобы указанные первый и второй приводы прикладывали соответствующие индивидуальные усилия F1, F2 к подвижному элементу 200 так, чтобы сумма индивидуальных усилий, F1+F2 соответствовала полному усилию, которое необходимо приложить для достижения положения, обозначенного уставкой Pos1 позиции, и при этом указанные усилия F1 и F2 были по существу равны одно другому.
С этой целью в ходе перемещения подвижного элемента 200 датчики 6, 7 положения измеряют положение Posm этого подвижного элемента. Используя измеренное положение Posm и уставку Pos1 позиции, устройства управления определяют две индивидуальные уставки Eff1, Eff2 усилий с учетом расхождения между положением, обозначенным уставкой Pos1 позиции, и измеренным положением Posm, в то время как указанные два привода 1, 2 прикладывают соответственно усилия F1 и F2 к подвижному элементу 200.
Предпочтительно блок 3 управления принимает также измеренное положение Posm подвижного элемента 200. В случае расхождения между положением, соответствующим уставке Pos1 позиции, первоначально сформированной блоком 3 управления, и измеренным положением блок 3 управления может изменить уставку Pos1 позиции, чтобы уменьшить это расхождение.
В рассматриваемом примере в ходе всего перемещения подвижного элемента 200 первый датчик 4 измеряет усилие F1m, прикладываемое первым приводом 1 к подвижному элементу 200, а второй датчик 5 измеряет усилие F2m, прикладываемое вторым приводом 2 к подвижному элементу 200. Кроме того, на основе этих измеренных усилий F1m, F2m устройства управления определяют индивидуальные уставки Eff1, Eff2 усилий, чтобы уменьшить расхождение между положением, соответствующим уставке Pos1 позиции, и измеренным положением Posm, указанные два привода 1, 2 прикладывают усилия F1, F2 соответственно к подвижному элементу 200.
Тем не менее, возможна ситуация, когда один из приводов может развить лишь ограниченное по величине усилие, не позволяющее достигнуть заданной этому приводу уставки усилия. В таких обстоятельствах неисправный привод - первый привод 1 или второй привод 2 - передает сигнал неисправности - Def1 или Def2 - центральному блоку 3 управления, который затем учитывает этот сигнал, чтобы опираться на исправный привод с целью перемещения подвижного элемента 200. Если неисправен первый привод 1, центральный блок 3 управления опирается на второй привод 2, причем система 100 работает так же, как в ситуации, когда уставка позиции передана первому приводу 1.
Совершенно аналогично первому варианту устройства управления, будучи встроены в центральный блок управления системы 100, позволяют сохранять программирование центрального блока 3 идентичным программированию, уже применяемому в известных системах. Это программирование просто дополняют, чтобы включить функции индивидуальных драйверных элементов, используемых в первом варианте. Таким образом, центральный блок 3 управления генерирует уставку позиции для одного из приводов, как и в известных системах. Согласно настоящему изобретению устройства управления поддерживают связь одно с другим, чтобы совместно использовать уставку позиции для преобразования ее в уставки усилий для различных приводов. Таким образом, устройства управления программируют независимо от программирования центрального блока 3 управления, служащего для генерации уставки позиции для одного из приводов.
Другое преимущество состоит в том, что устройства управления контролируют состояние обоих приводов 1, 2, как и остальная часть центрального блока управления, тем самым повышая надежность системы 100. Таким образом осуществляется двойной контроль как с общей точки зрения в центральном блоке 3 управления, так и с локальной точки зрения в устройствах управления;
Независимо от конкретного варианта настоящего изобретения центральный блок 3 управления генерирует уставку позиции для одного из приводов и позволяет осуществлять сервоуправление положением подвижного элемента в соответствии с этой уставкой. Согласно настоящему изобретению устройства управления осуществляет такое сервоуправление положением посредством наложения на него сервоуправления усилием. Таким образом, осуществляется сервоуправление с общей точки зрения в центральном блоке 3 управления и с локальной точки зрения в устройствах управления, что позволяет добиться очень тонкого управления положением подвижного элемента.
Благодаря влиянию устройств управления привод 1, который центральный блок 3 управления считает ведущим приводом, прикладывает к подвижному элементу 200 усилие, которое не равно усилию, первоначально требуемому центральным блоком 3 управления, а уменьшено на величину усилия, прикладываемого к подвижному элементу 200 вторым приводом 2. Это способствует увеличению срока службы привода 1.
Настоящее изобретение не ограничивается приведенным выше описанием и охватывает все варианты, созданные в рамках, определяемых Формулой изобретения.
В частности, можно предвидеть, что система 100 может иметь и другие функции в дополнение к перемещению подвижного элемента 200. Например, в области авиации система 100 согласно настоящему изобретению позволяет осуществлять тестирование приводов непосредственно на борту воздушного судна в процессе предполетной проверки. В качестве примера, такое тестирование может проходить в два этапа для проверки обоих приводов 1, 2 по очереди. Таким образом, на первом этапе тестирование содержит следующие шаги:
- преобразование уставки позиции для подвижного элемента в уставку усилия;
- использование устройства управления с целью генерации уставки усилия для одного («ведущего») из приводов;
- генерация уставки противодействующего усилия для второго («ведомого») из указанных приводов с использованием устройства управления, одновременно с предшествующим шагом и на основе профиля положения и профиля противодействующего усилия и уставки позиции;
- измерение положения подвижного элемента и
- сравнение положения подвижного элемента с положением, соответствующим уставке позиции.
На втором этапе тестирование содержит в точности те же самые шаги, но ведомый и ведущий приводы меняются ролями, так что каждый из этих двух приводов по очереди генерирует противодействующее усилие.
Таким образом, тестирование позволяет оценить функционирование каждого из приводов по очереди, чтобы понаблюдать, как он функционирует, и обнаружить возможные неисправности. Применяя специальные алгоритмы для обработки результатов тестирования, можно также прогнозировать возникновение неисправностей приводов в будущем.
Хотя приводы 1, 2, описанные выше, являются приводами линейного перемещения, эти приводы могут, естественно, быть поворотными приводами. Кроме того, хотя приводы, описанные выше, являются электромеханическими приводами, эти приводы могут быть гидравлическими приводами, как показано на Фиг 3.
Хотя система 100, описанная здесь, имеет два привода, управляемые одновременно с точки зрения развиваемого ими усилия, можно представить себе систему 100, обладающую большим числом приводов и устройствами управления, которые в этом случае управляют всеми приводами одновременно с точки зрения развиваемого ими усилия в соответствии с уставкой позиции, переданной одному из этих приводов.
В предпочтительном варианте индивидуальные драйверные элементы 10, 20 генерируют по существу равные индивидуальные уставки Eff1, Eff2 усилий, так что первый и второй приводы прикладывают индивидуальные усилия F1, F2 к подвижному элементу, причем усилие F1 по существу равно усилию F2. Можно представить себе вычисление индивидуальных уставок усилий таким образом, что первый и второй приводы прикладывают соответствующие индивидуальные усилия F1, F2 к подвижному элементу 200, так что сумма, F1+F2, этих индивидуальных усилий соответствует полному усилию, которое нужно развить для достижения положения, обозначенного уставкой Pos1 позиции, без того, чтобы усилие F1 обязательно было по существу равно усилию F2. Тем не менее, это приведет к созданию менее оптимальной системы с приводом от электродвигателей для перемещения подвижного элемента 100: например, срок службы привода 1 будет увеличен в меньшей степени, чем в случае, когда привод 1 прикладывает к подвижному элементу усилие F1, которое по существу равно усилию F2, прикладываемому вторым приводом 2.
Если система 100 с приводом от электродвигателей для перемещения подвижного элемента имеет только один датчик положения для измерения положения подвижного элемента 200, этот датчик положения должен быть соединен одновременно с центральным блоком 3 управления и с обоими индивидуальными драйверными элементами 10, 20 в первом варианте и должен быть соединен с центральным блоком 3 управления во втором варианте. Хотя в первом варианте каждый индивидуальный драйверный элемент соединен только с одним из датчиков положения, каждый индивидуальный драйверный элемент 10, 20 может быть соединен с обоими датчиками 6, 7 положения.
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства

