Результат интеллектуальной деятельности: АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР
Вид РИД
Изобретение
Изобретение относится к области средств автоматизации и может быть использовано для управления динамическими объектами в химической промышленности, теплотехнике, энергетике.
Регуляторы с релейной характеристикой (релейные регуляторы) широко распространены в технике (см., например, Цыпкин Я.З. Релейные автоматические системы. - М.: Наука, 1974). Известны также регуляторы с релейными характеристиками, работающие по принципу «включено-выключено» и имеющие положительный или отрицательный гистерезис с элементами самонастройки (см., например, а.с. СССР и патенты РФ №№631864, 1418648 №1585778, №2369893, №2462744).
Наиболее близким по технической сути к заявляемому устройству является адаптивный релейный регулятор по №2462744. Опубл. Бюл. 2012, №27. Регулятор-прототип содержит индикатор экстремумов, нуль-орган, релейный блок, сумматор, суммирующее устройство, блок вычисления среднего значения сигнала, интегратор и реализует следующий закон управления:

где M(t)=A(t)+k·(xэ(t)-A(t))-x(t),
A(t)=k1·x0+(1-k1)·a(t),
В - постоянная величина,
 , есть смещение сигнала x0, обеспечивающее автоматическое смещение и выходного сигнала объекта, (регулируемой координаты х(t)) относительно x0 до тех пор, пока среднее значение регулируемой координаты, определяемое как
, есть смещение сигнала x0, обеспечивающее автоматическое смещение и выходного сигнала объекта, (регулируемой координаты х(t)) относительно x0 до тех пор, пока среднее значение регулируемой координаты, определяемое как  , не станет равным х0. Здесь k, k1 и k2 - постоянные коэффициенты, xmax, xmin - экстремальные значения сигнала регулируемой координаты. Sign - знаковая функция, принимающая значение «+1», если сигнал функции переключения (2) больше нуля, и «0», если этот сигнал меньше или равен нулю. Таким образом, данный регулятор решает задачу обеспечения равенства среднего значения регулируемой координаты в установившемся режиме работы его заданному значению путем автоматического смещения сигнала х0 в сторону увеличения или уменьшения на заранее неизвестную величину в условиях действия несимметричности релейного управляющего сигнала или сигнальных возмущений (например, постоянных, или медленно меняющихся).
, не станет равным х0. Здесь k, k1 и k2 - постоянные коэффициенты, xmax, xmin - экстремальные значения сигнала регулируемой координаты. Sign - знаковая функция, принимающая значение «+1», если сигнал функции переключения (2) больше нуля, и «0», если этот сигнал меньше или равен нулю. Таким образом, данный регулятор решает задачу обеспечения равенства среднего значения регулируемой координаты в установившемся режиме работы его заданному значению путем автоматического смещения сигнала х0 в сторону увеличения или уменьшения на заранее неизвестную величину в условиях действия несимметричности релейного управляющего сигнала или сигнальных возмущений (например, постоянных, или медленно меняющихся).
Недостаток регулятора заключается в том, что он не может автоматически стабилизировать амплитуду автоколебаний на заданном уровне в условиях действия параметрических возмущений.
Техническим результатом изобретения является расширение функциональных возможностей устройства, заключающееся в обеспечении автоматической стабилизации амплитуды автоколебаний регулируемой координаты на заданном уровне в условиях неопределенности параметров объекта и среды.
Для достижения результата в адаптивный релейный регулятор, содержащий интегратор, релейный блок, блок вычисления среднего значения сигнала, нуль-орган, выход которого подключен к выходу регулятора, индикатор экстремумов, вход которого связан с первым входом регулятора и вторым входом нуль-органа, а информационные и управляющий выходы - с соответствующими входами релейного блока и блока вычисления среднего значения сигнала, выход которого соединен с первым инверсным входом интегратора, второй вход которого соединен со вторым входом регулятора, суммирующее устройство, первый вход которого соединен со вторым входом регулятора, второй вход - с выходом интегратора, введены задатчик, дистанционно управляемый сумматор, устройство для вычисления модуля сигналов, информационные и управляющий входы которого соединены соответственно с информационными и управляющим выходами индикатора экстремумов, второй интегратор, первый вход которого соединен с выходом задатчика, второй вход - с выходом устройства вычисления модуля сигналов, а выход - с управляющим входом дистанционно управляемого сумматора, информационные входы которого соединены соответственно с выходами релейного блока и суммирующего устройства.
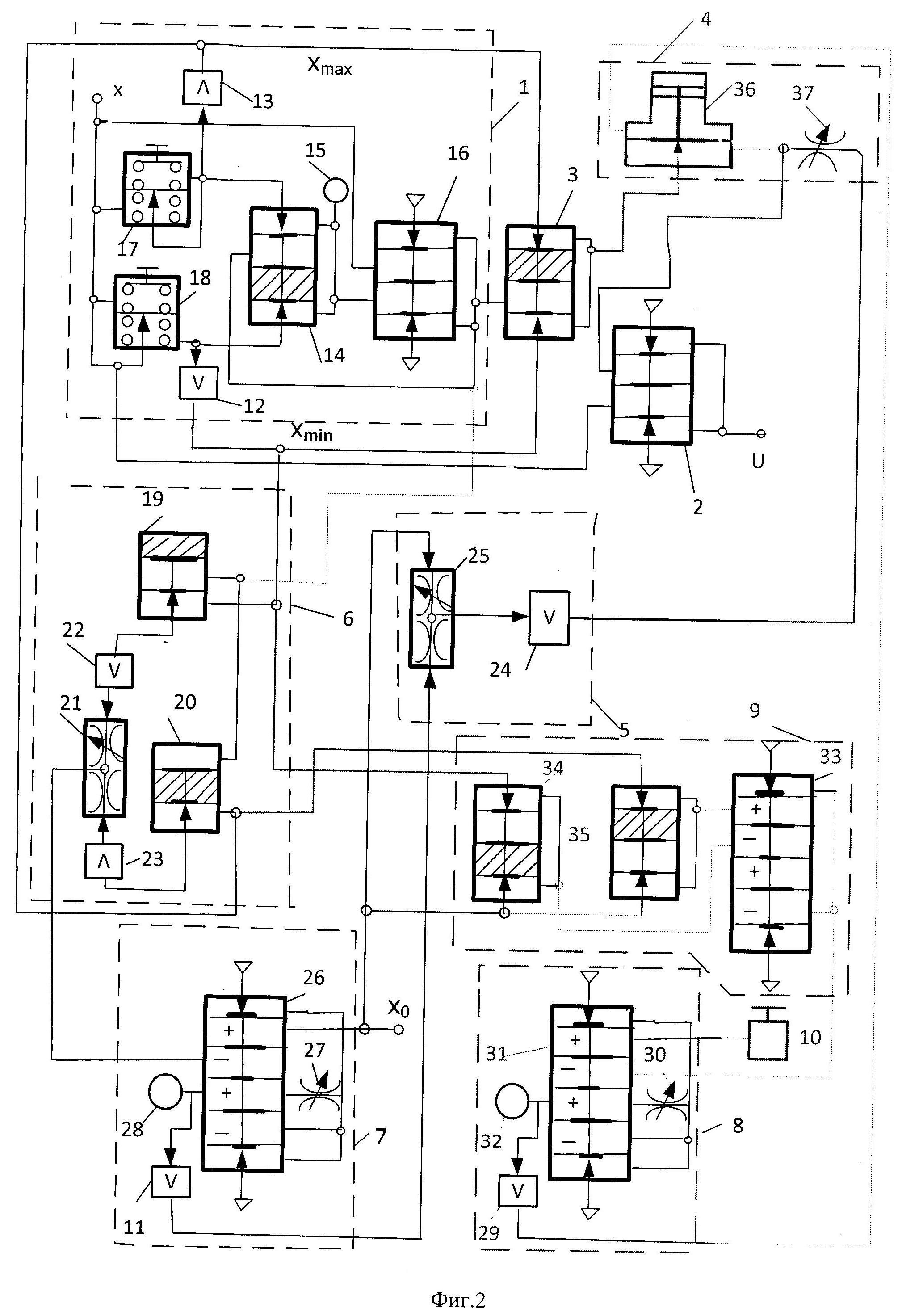
Устройство изображено на фиг.1, где представлена его блок-схема, фиг.2, которая иллюстрирует пример конкретного выполнения регулятора на пневматических элементах УСЭППА, и фиг.3, где представлены результаты исследования процессов в релейной системе с предложенным регулятором методом цифрового моделирования.
Устройство содержит (фиг.1) индикатор экстремумов 1, нуль-орган 2, релейный блок 3, дистанционно управляемый сумматор 4, суммирующее устройство 5, блок вычисления среднего значения сигнала 6, первый интегратор 7, блок выделения модуля 8, второй интегратор 9, задатчик 10, х - первый вход регулятора (переменная), х0 - второй вход регулятора (сигнал задания), U - выходной сигнал регулятора.
Первый вход регулятора (переменная - х) соединен с входами индикатора экстремумов 1 и вторым входом (инверсным) нуль-органа 2, информационные и управляющий выходы индикатора экстремумов соединены соответственно с информационными входами релейного блока 3, блока вычисления среднего значения сигнала 6 и блока вычисления модуля 8, второй вход регулятора x0 связан первым входом суммирующего устройства 5, с третьим информационным входом блока выделения модуля 8 и первым входом интегратора 7, второй вход которого соединен с выходом блока вычисления среднего значения сигнала 6, выход интегратора 7 подключен ко второму входу суммирующего устройства 5, выход которого соединен со вторым входом дистанционно управляемого сумматора 4, первый вход которого связан с выходом релейного блока 3, выход задатчика 10 соединен с первым входом второго интегратора 9, второй вход которого связан с выходом блока выделения модуля 8, выход нуль-органа 2 подключен к выходу регулятора U.
Подобное соединение элементов позволяет модифицировать закон управления (1) и реализовать его следующим образом:

где 
A(t)=k1·x0+(1-k1)·a(t),
В - постоянная величина,
 , z - заданное значение амплитуды автоколебании,
, z - заданное значение амплитуды автоколебании,
 , есть смещение сигнала x0, обеспечивающее смещение и выходного сигнала объекта, (регулируемой координаты x(t)) относительно x0 до тех пор, пока среднее значение регулируемой координаты, определяемое как
, не станет равным x0. В результате автоматически устраняется статическая ошибка, а изменение коэффициента k(t) в диапазоне от 0 до 1 позволяет стабилизировать амплитуду автоколебаний на заданном уровне z, чем и достигается цель изобретения. Здесь k, k1 и k2 - постоянные коэффициенты, xmax, xmin - экстремальные значения сигнала регулируемой координаты. Sign - знаковая функция, принимающая значение «+1», если сигнал функции переключения (3) больше нуля, и «0», если этот сигнал меньше или равен нулю.
, есть смещение сигнала x0, обеспечивающее смещение и выходного сигнала объекта, (регулируемой координаты x(t)) относительно x0 до тех пор, пока среднее значение регулируемой координаты, определяемое как
, не станет равным x0. В результате автоматически устраняется статическая ошибка, а изменение коэффициента k(t) в диапазоне от 0 до 1 позволяет стабилизировать амплитуду автоколебаний на заданном уровне z, чем и достигается цель изобретения. Здесь k, k1 и k2 - постоянные коэффициенты, xmax, xmin - экстремальные значения сигнала регулируемой координаты. Sign - знаковая функция, принимающая значение «+1», если сигнал функции переключения (3) больше нуля, и «0», если этот сигнал меньше или равен нулю.
Таким образом, данный регулятор решает задачу обеспечения как равенства среднего значения регулируемой координаты в установившемся режиме работы его заданному значению путем автоматического смещения сигнала х0 в сторону увеличения или уменьшения на заранее неизвестную величину, так и дополнительно обеспечивает стабилизицию амплитуды автоколебаний неопределенных объектов (или при параметрических возмущениях), что придает ему новое качество.
Рассмотрим работу отдельных элементов регулятора и устройства в целом. Индикатор 1 экстремумов (А.С. 482757. Бюл., 1975, №32) работает следующим образом. При изменении регулируемой координаты, например, в сторону уменьшения, на выходе элемента 17 запоминается сигнал хмакс при x<(xмaкc+a), где а - величина сдвига, настраиваемая в элементе 17 запоминания, элемент 16 срабатывает и отключает элемент запоминания 13, закрыв верхний контакт реле 14, а выход элемента запоминания 18 через другой контакт реле 14 соединяется с вторым входом элемента 16 сравнения. При дальнейшем уменьшении сигнала выходной сигнал элемента 16 сравнения не изменяется. С увеличением входного сигнала на выходе элемента 18 запоминания запоминается xмин, элемент 16 сравнения принимает исходное положение, а второй вход элемента 16 сравнения вновь соединяется с выходом элемента 17 запоминания максимума. Повторители 12 и 13 обеспечивают гальваническую развязку сигналов хмакс, xмин. Пневмоемкость 15 обеспечивает сохранение сигналов при переключениях реле 14.
Нуль-орган 2 формирует на своем выходе сигнал управления U, равный «0» или «1» в зависимости от того меньше или больше нуля сумма сигналов A(t)+k(t)·(xэ-A(t))-x(t)=(1-k(t)·A(t)+k(t)·xэ-x(t), действующая на его входах.
Релейный блок 3 (двух контактное реле) обеспечивает коммутацию хмакс, xмин по команде с выхода элемента 16 сравнения на вход дистанционно управляемого сумматора 4. Последний выполнен по схеме дроссельного сумматора. Он содержит дроссель 37и дистанционно управляемый дроссель 36, выполненный, например, по схеме а.с. №547580, опубл. в Бюл. №7, 1977 г. Его выход равен (1-k(t))·A(t)+k(t)·xэ, где k(t)=d/(d+b(t)), d - постоянная проводимость одного из дросселей 37, a b(t) - переменная проводимость дистанционно управляемого второго дросселя сумматора 36, A(t) и хэ - сигналы, действующие на входах сумматора 4.
Суммирующее устройство 5 содержит дроссельный сумматор 25, работающий по принципу сумматора 4, выходной сигнал которого равен A(t)=(1-k1)·a(t)+k1·x0, и повторитель-усилитель мощности 24. Этот блок обеспечивает масштабирование задающего сигнала x0.
Блок вычисления среднего значения 6 имеет три входа и может быть реализован, например, так, как показано на фиг.2. Он содержит дроссельный сумматор 21, работающий по принципу дистанционно управляемого сумматора 4: (1-k4)·xmax+k4·xmin(t), где коэффициент k5=0.5, повторители-усилители мощности 22 и 23, два клапана 19 и 20, с помощью которых запоминаются сигналы xmax и xmin с выхода индикатора экстремумов 1 по команде с управляющего выхода индикатора экстремумов 1 таким образом, что на выходе повторителя 22 выделяется сигнал минораты входного сигнала, а на выходе повторителя 23 - максоранты. Эти сигналы суммируются в дроссельном сумматоре по формуле
, то есть находится среднее значение входного сигнала на каждом полупериоде колебаний сигнала x(t). Действительно, если сигнал x(t) изменяется от нуля в сторону увеличения xmin=0. Выходной управляющий сигнал индикатора экстремумов 1 равен «I». Поэтому сигнал xmin=0 запоминается в индикаторе экстремумов-1 и проходит через открытый контакт клапана 19, через повторитель 22 и сумматор 24 на вход интегратора 7. Сигнал xмах также равен нулю, и он тоже запоминается с помощью клапана 20 и повторителя 23. Когда появляется xмах≠0, выходной сигнал индикатора экстремумов принимает значение «0». В результате клапан 19 закрывается и сохраняет xmin=0 на выходе повторителя 22, до появления следующего сигнала xmin. Сигнал xмах появляется на выходе клапана 20. Затем при очередном появлении сигнала xmin сигнал xмах запомнится на пол периода автоколебаний сигнала х. Далее цикл повторяется.
Интегратор 7 содержит, усилитель 26, пневмоемкость 28, дроссель 27 и повторитель 11. Входами его являются выходной сигнал блока вычисления среднего значения 6 и сигнала x0. Это типовое устройство, построенное на усилителе, охваченном инерционной положительной обратной связью и формирующее на своем выходе нарастающий или убывающий сигнал a(t), пропорциональный разности двух сигналов, действующих на его входах.
Блок выделения модуля 8 содержит усилитель 33 и два коммутирующих элемента 32 и 34. На выходе блока формируется значение амплитуды автоколебаний |x0-xэ(t)|. Если на выходе информационного выхода индикатора экстремумов запоминается сигнал, например, xmin, то на управляющем выходе элемента 18-«1». Этот сигнал открывает верхнее сопло элемента 34 и закрывает нижнее сопло элемента 32. В результате на прямой вход усилителя 33 проходит через открытый верхний контакт элемента 34 сигнал xmin, а на его инверсный вход через открытый нижний контакт x0, и на выходе усилителя 33 формируется знакоположительный сигнал x0-xmin(t), равный текущему значению амплитуды автоколебаний. Когда в индикаторе экстремумов запоминается сигнал хмах, то сигнал «0» с выхода элемента 3 вновь переключает элементы 32 и 34. В результате через открытые контакты элементов 32 и 34 на прямой и инверсный входы усилителя 33 проходят соответственно сигналы хмах и х0, и на выходе усилителя 33 формируется знакоположительный сигнал xmax(t)-x0.
Второй интегратор 9 имеет конструкцию интегратора 7. Он содержит также повторитель 29, дроссель 30, усилитель 31, емкость 32. На его входе действует разность сигналов - сигнал с задатчика 9, формирующий сигнал заданного значения амплитуды, и выходной сигнал с блока выделения модуля 6, на выходе которого формируется текущее значение амплитуды автоколебаний. При отклонении текущего значения амплитуды автоколебаний от заданного значения, на выходе интегратора вырабатывается сигнал, изменяющий проводимость дросселя 4. Это приводит к изменению моментов переключения регулятора, что влечет за собой изменение и амплитуды автоколебаний переменной х, если регулятор работает в системе с объектом, порядок передаточной функции или системы дифференциальных уравнений которого больше двух.
Работу регулятора в целом рассмотрим с привлечением рисунков на фиг.1 и 2. Пусть сигнал x(t) нарастает от нуля в сторону увеличения. Тогда экстремальные значения этого сигнала в момент включения регулятора равны нулю. Один из этих сигналов xmin проходит через релейный блок 3 и дистанционно управляемый сумматор 4 на вход нуль-органа 2. Таким образом, на входе нуль-органа 2 в момент включения регулятора действует сигнал (1-k(t))A(t)>0 и на его выходе формируется сигнал управления «1».
Одновременно в момент включения регулятора выходной управляющий сигнал индикатора экстремумов 1 воздействует на элементы блока 6, открывая клапан 19 и закрывая клапан 20. В результате на выходе сумматора 21 сохраняется нулевой выходной сигнал. Как только входной сигнал x(t) достигнет величины (1-k(t))∗A(t) нуль-орган 2 принимает исходное состояние. В результате выходной сигнал регулятора становится равным U=0. Далее при появлении экстремального значения входного сигнала регулятора хэ=xмах выходной управляющий сигнал индикатора экстремумов 1 вновь становится равным «0». В результате клапан 19 закрывается, xmin запоминается в повторителе 22, а клапан 20 открывается, обеспечивая прохождение сигнала xмах через повторитель 23 и сумматор 21 на инверсный вход усилителя 26 интегратора 7. Выходной сигнал интегратора 7 через суммирующее устройство 5 масштабирует величину сигнала x0, обеспечивая симметричность автоколебаний в системе. Одновременно сигналы x0, xmin или хмах через коммутирующие элементы 34 и 35 блока выделения модуля 9 поступают на вход усилителя 33, а с его выхода на вход усилителя 31 второго интегратора 8. В усилителе 31 сравниваются сигналы заданного значения амплитуды автоколебаний, который формируется задатчиком 10, и ее текущего значения, поступающего с выхода блока 9. По результатам этого сравнения в интеграторе вырабатывается сигнал, который воздействует на управляемый дроссель 36 блока 4, изменяя его проводимость тех пор пока амплитуда автоколебаний не станет равной заданной величине.
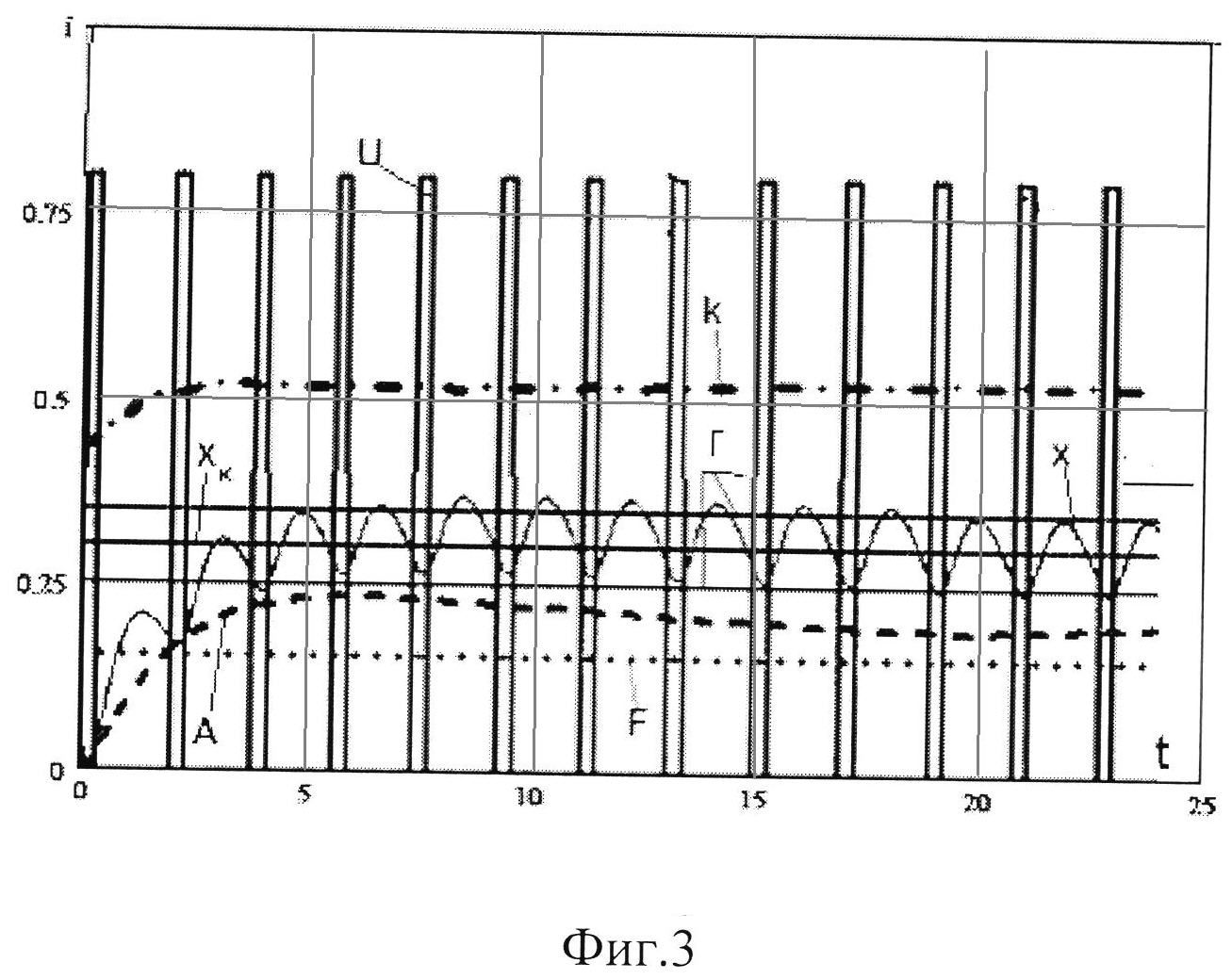
Работа регулятора в динамике иллюстрируется рисунком фиг.3, где представлены процессы изменения сигналов регулятора при его использовании в системе управления объектом, который описывается дифференциальным уравнением третьего порядка вида
p3x+5.5p2x+9.5px+5=7.5u+F,
где  , иллюстрирует процессы автоматического изменения коэффициента k(t) и уставки A(t) в функции переключения (3), приводящие к стабилизации амплитуды автоколебаний на заданном уровне и их симметричности относительно уставки.
, иллюстрирует процессы автоматического изменения коэффициента k(t) и уставки A(t) в функции переключения (3), приводящие к стабилизации амплитуды автоколебаний на заданном уровне и их симметричности относительно уставки.
Коэффициенты и выходные сигналы источников сигналов были следующими х0=0.3, k(0)=0.45, k1=0.05, k2=0.025, k3=0.007, B=0.8, F=0.15, z=0.05. Из рисунка фиг.3 видно, что в момент включения сигнал A(t) близок к нулю, и этот сигнал достаточно быстро нарастает, поскольку входной сигнал интегратора велик, до момента появления первого xmax.
Первое переключение управления происходит с «недоходом» регулируемой координаты х до величины A(t). Затем скорость нарастания выходного сигнала интегратора уменьшается. Изменение сигнала A(t) будет продолжаться до тех пор, пока статическая ошибка не станет равной нулю. Одновременно стабилизируется и величина амплитуды автоколебаний благодаря автоматическому увеличению k(t).
(Следует отметить, что изменением коэффициента k(t) в функции переключения (3) в диапазоне от 0 до 1 амплитуда автоколебаний в системе при прочих равных условиях может изменяться в широких пределах). Интеграторы 7 и 8 настраиваются таким образом, чтобы процессы в системе были сходящимися. Регулятор в релейных системах управления технологическими процессами обеспечивает симметричность автоколебаний в установившемся режиме работы и одновременно - заданную точность в условиях неопределенности параметров объекта и среды. В этом проявляются адаптивные свойства заявляемого устройства и его новизна.
Адаптивный релейный регулятор, содержащий интегратор, релейный блок, блок вычисления среднего значения сигнала, нуль-орган, выход которого подключен к выходу регулятора, индикатор экстремумов, вход которого связан с первым входом регулятора и вторым входом нуль-органа, а информационные и управляющий выходы - с соответствующими входами релейного блока и блока вычисления среднего значения сигнала, выход которого соединен с первым инверсным входом интегратора, второй вход которого соединен со вторым входом регулятора, суммирующее устройство, первый вход которого соединен со вторым входом регулятора, второй вход - с выходом интегратора, отличающийся тем, что в него введены задатчик, дистанционно управляемый сумматор, устройство для вычисления модуля сигналов, информационные и управляющий входы которого соединены соответственно с информационными и управляющим выходами индикатора экстремумов, второй интегратор, первый вход которого соединен с выходом задатчика, второй вход - с выходом устройства вычисления модуля сигналов, а выход - с управляющим входом дистанционно управляемого сумматора, информационные входы которого соединены соответственно с выходами релейного блока и суммирующего устройства.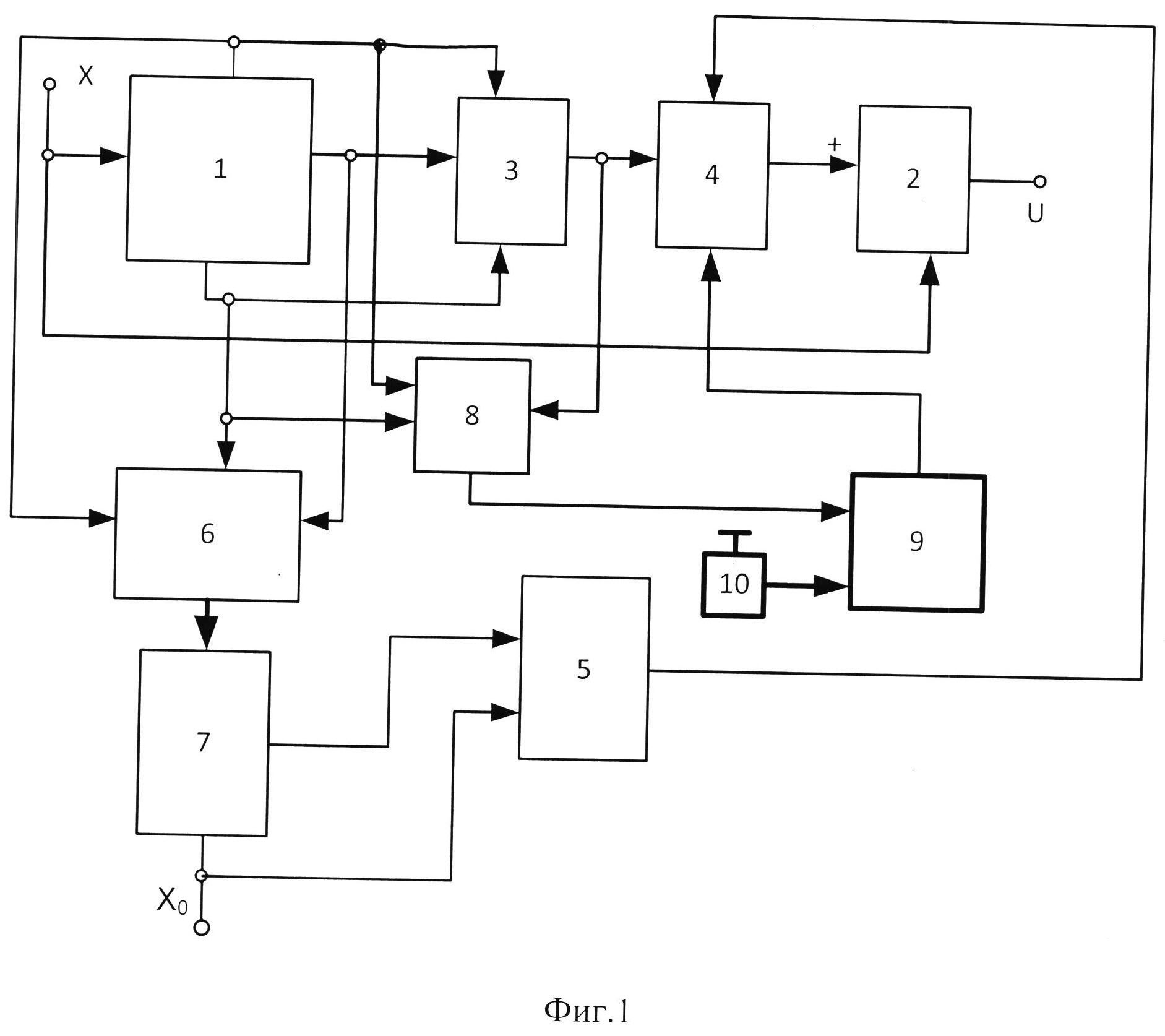
Шихта для получения свинцового стекла
Способ работы котельной установки
Антигололедная композиция
Способ и устройство для нанесения покрытий на основе нитрида титана
Расплавляемый электролит для химического источника тока
Экономичная двухслойная обмотка электрической машины
Способ получения трехосновных карбоновых кислот адамантанового ряда
Способ получения антибиотического покрытия в тлеющем разряде в парах 3-нитро-1-адамантановой кислоты
Дезинфицирующая композиция
Взрывчатые вещества, состоящие из нитрата аммония и жидкого горючего
Устройство для измерения вектора скорости движения изображения объекта со случайным распределением яркостей
Гибкий абразивный инструмент
Способ получения антибиотического покрытия на фильтрующем материале
Энергоэффективная электрическая машина
Электролит для химического источника тока (его варианты)
Установка для подготовки подпиточной воды теплоэлектроцентрали
Способ и устройство автономной радиолокационной самокоррекции промаха при встрече малоразмерного летательного аппарата с объектом на заключительном участке траектории полета
Производные 2-r1-4-r2-6-полинитрометил-1,3,5-триазинов, обладающие антибактериальной активностью
Способ производства фруктового продукта из яблок и ягодного сырья
Способ производства фруктового продукта из яблок и цитрусового сырья

