Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ЧЕЛОВЕКА И СТЕЛЬКА, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области измерений параметров тела при движении человека для диагностических целей, в частности к измерениям веса человека, включая вес носимого им отягощения, с использованием датчиков давления, расположенных в стельке обуви.
УРОВЕНЬ ТЕХНИКИ
Известны различные способы определения веса человека во время его движения, при осуществлении которых используют датчики, расположенные в обуви.
В заявке JP 2002090216 (публ. 11.09.2000; G01G 19/52, A61B 5/11) описано устройство, позволяющее определять вес человека, приходящийся на его больную ногу. Устройство выполнено в виде специальной обуви с нижней пластиной и верхней пластиной - подошвой, подвижной относительно нижней пластины. Между пластинами помещен воздушный мешок, давление воздуха в котором изменяется в зависимости от веса, приходящегося на ногу. Измерительный прибор, расположенный на верхней части обуви, измеряет давление в воздушном мешке, по которому судят об измеряемом весе.
В международной заявке WO 200136051 (публ. 25.05.2001, A63B 05/103) описано устройство, которое реализует способ определения веса человека, приходящегося, по меньшей мере, на одну конечность. Устройство предназначено для обучения пациента распределять нагрузку между здоровой и больной ногами и может быть использовано при реабилитации заболеваний, вызванных неврологическими расстройствами, или ортопедических травмах. Устройство включает гибкие стельки с датчиками давления, расположенными в пятке и носочной части стопы. Сигналы с датчиков обрабатываются процессором, формирующим сигналы пациенту о правильном или неправильном распределении веса на больную ногу.
В патенте US 6273863 (публ. 14.08.2001; A61B 05/103, A61B 05/117) описана система мониторинга для реабилитации ортопедических больных с переломами нижних конечностей. Система включает в себя гибкие стелька, которые располагаются внутри обуви. Стельки включают в себя датчики силы или давления, подключаемые к процессору для определения веса, приходящегося на больную ногу. В системе реализован принцип биологической обратной связи, когда пациент поощряется при нагрузке больной ноги весом, рекомендованным на время реабилитации.
Наиболее близкими к заявляемому изобретению являются способ и устройство определения веса больного человека, описанные в международной заявке WO 2009059134 (публ. 07.05.2009; A61B 05/103, G01L 01/00). Изобретение позволяет контролировать вес, который пациент распределяет на больную ногу, с целью устранения ситуаций, когда этот вес превышает определенный для данного больного порог нагрузки на конечность. С целью определения веса на опорной поверхности устанавливаются электрические или механические датчики давления. Датчики устанавливаются в районе пятки и носочной части стопы, а также по всей поверхности стопы. Опорная поверхность может помещаться в обувь. Сигналы с датчиков обрабатываются микроконтроллером, определяющим, не превышается ли вес, приходящийся на больную ногу, установленный порог.
Известные решения для определения веса человека главным образом предназначены для медицинских целей, в частности для определения веса человека, приходящегося на больную ногу. Это предопределяет сложную конструкцию предназначенных для этого устройств и ограниченное их применение - в основном для лечебных целей.
Технической задачей, на решение которой направлено настоящее изобретение, является создание способа определения веса, прежде всего, здорового человека. При этом определяется не только собственный вес человека, но и вес носимого им отягощения, причем в реальном времени и при различных видах двигательной активности. Возможность определения веса с такими требованиями позволит оценивать различные физиологические параметры состояния человека, в том числе связанные с физической активностью.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Одним объектом настоящего изобретения является способ определения веса человека, при котором регистрируют сигналы от датчиков силы, установленных в стельках пары обуви, при этом в каждой стельке установлены два датчика силы, из которых первый установлен в районе пятки, а второй установлен в носочной части стопы. На основе соотношения во времени сигналов с датчиков силы обеих стелек и с учетом значения сигналов с этих датчиков силы определяют вид двигательной активности. На основе суммирования значений сигналов с упомянутых датчиков силы и с учетом определенного при этом вида двигательной активности определяют вес человека, включая вес носимого им отягощения.
Во время движения человек опирается попеременно то на одну, то на другую ногу. Датчики силы, расположенные в районе пятки и в носочной части стопы, позволяют определить время контакта ноги с опорой (опорная фаза) и время переноса ноги (фаза переноса) в пределах одного цикла ходьбы или бега. Поскольку для различных видов двигательной активности характерны различные соотношения времени контакта с опорой и времени переноса ноги, то соотношение во времени сигналов с датчиков силы разных стелек позволяет определить характер или вид двигательной активности.
Особенностью настоящего способа является определение веса человека, включая вес носимого им отягощения, непосредственно во время его той или иной двигательной активности (ходьба, бег и др.) и с учетом вида двигательной активности. Это позволяет оценивать различные физиологические параметры состояния человека, в том числе связанные с физической активностью.
В частных случаях осуществления способа различные виды двигательной активности могут быть определены (идентифицированы) следующим образом.
Вид двигательной активности «ходьба» определяют при условии периодического изменения значений сигналов с датчиков силы обеих стелек и частичном перекрытии во времени сигналов с датчиков силы разных стелек.
Вид двигательной активности «бег» определяют при условии периодического изменения значений сигналов с датчиков силы обеих стелек и отсутствии перекрытия во времени сигналов с датчиков силы разных стелек.
Вид двигательной активности «стояние» определяют при условии наличия сигналов с датчиков силы обеих стелек, превышающих заданное значение, и по существу полного перекрытия во времени сигналов с датчиков силы разных стелек.
Изобретателями был получен ряд экспериментальных зависимостей, позволяющих определять вес человека, включая вес носимого им отягощения, с учетом определенного вида двигательной активности.
Так, при медленной ходьбе с темпом до 60 шагов в минуту вес человека Р, включая вес носимого им отягощения, может быть определен по следующей формуле
Р=KW·FW,
где KW - калибровочный коэффициент, который определяют при ходьбе с темпом до 60 шагов в минуту для данного человека с известным весом;
FW - усредненное значение силы давления стоп за один цикл ходьбы, причем
FW=(F1max+F2max)/2,
где F1max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы одной стельки;
F2max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы другой стельки,
при этом за цикл принимают два последовательный шага одной и другой ногой.
При ходьбе с темпом 60 и более шагов в минуту вес человека, включая вес носимого им отягощения, может быть определен как
Р=KW·FW·(1010-1,2·V-0,026·V2)·0,001,
где KW - калибровочный коэффициент, который определяют при ходьбе с темпом до 60 шагов в минуту для данного человека с известным весом;
FW - усредненное значение силы давления стоп за один цикл ходьбы, причем
FW=(F1max+F2max)/2,
где F1max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы одной стельки;
F2max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы другой стельки;
V - число шагов в минуту,
при этом за цикл принимают два последовательных шага одной и другой ногой.
Вес человека, включая вес носимого им отягощения, при беге может быть определен по формуле
P=KR·FR·(1090-4,4·V-0,045·V2)·0,001,
где KR - калибровочный коэффициент, который определяют во время бега для данного человека с известным весом;
FR - усредненное значение силы давления стоп за один цикл бега, причем
FR=(F1max+F2max)/2,
где F1max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы, одной стельки;
F2max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы, другой стельки;
V - число шагов в минуту,
при этом за цикл бега принимают два последовательных шага одной и другой ногой.
Вес человека, включая вес носимого им отягощения, при стоянии может быть определен по формуле
P=KS·FS,
где KS - калибровочный коэффициент, который определяют во время стояния для данного человека с известным весом;
FS - усредненное значение силы давления стоп за период стояния, причем
FS=(F1max+F2max)/2,
где F1max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы одной стельки;
F2max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы другой стельки.
В частности, при осуществлении способа дополнительно регистрируют сигналы от дополнительных датчиков силы, установленных в каждой стельке и расположенных между упомянутыми первым и вторым датчиками силы, по существу по траектории силы реакции опоры при ходьбе, и используют зарегистрированные сигналы с дополнительных датчиков силы наряду с сигналами с первого и второго датчиков силы. Это позволяет более точно определять вес человека, включая вес носимого им отягощения.
Другим объектом изобретения является стелька, предназначенная для осуществления способа. Стелька содержит, по меньшей мере, первый датчик силы, установленный в районе пятки стопы, и второй датчик силы, установленный в носочной части стопы, выполненные с возможностью регистрации сигналов, характеризующих силу давления, оказываемого стопой человека.
Дополнительно стелька может быть снабжена, по меньшей мере, аналого-цифровым преобразователем и приемопередающим устройством, обеспечивающими преобразование сигналов с датчиков силы в цифровую форму и передачу их во внешнее вычислительное устройство.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение поясняется следующими графическими материалами.
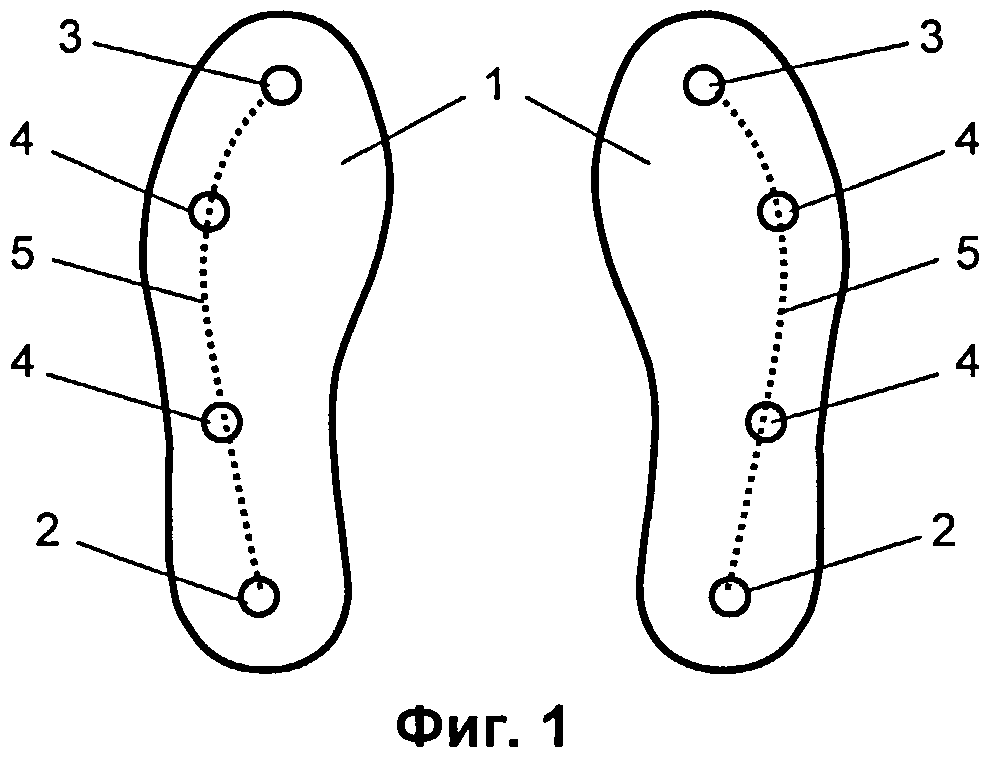
На Фиг.1 схематично показана конструкция стельки с установленными в ней датчиками силы. Показаны обе - правая и левая стельки - и размещение датчиков силы относительно траектории силы реакции опоры при ходьбе.
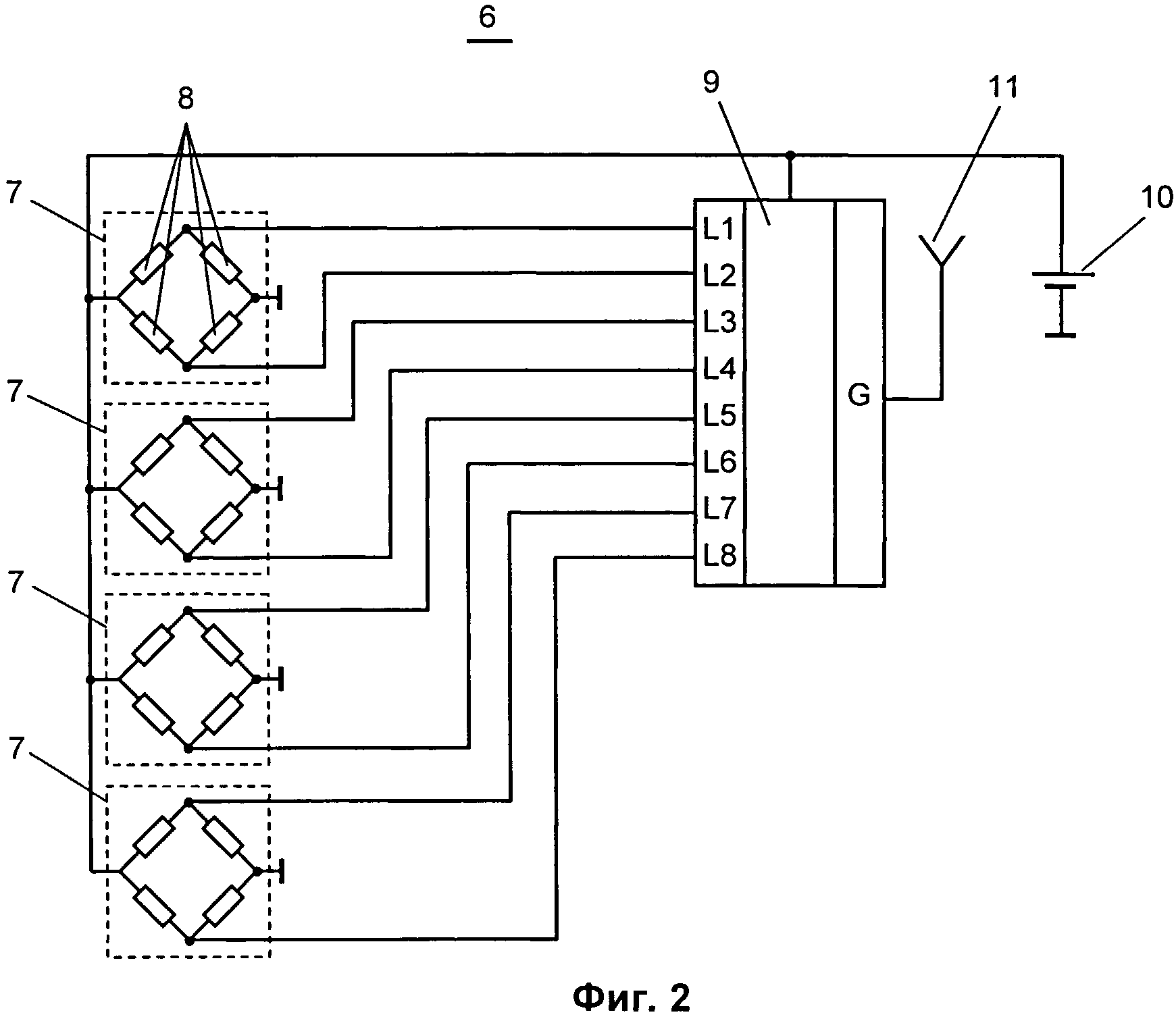
На Фиг.2 приведена электрическая схема одного примерного измерительного устройства для регистрации усилия, оказываемого стопой на датчики силы, размещенные в стельках, как это показано на Фиг.1. В данном примере каждый датчик силы выполнен как тензометрический преобразователь в виде четырех тензорезисторов, включенных по мостовой схеме.
На Фиг.3 приведены примерные временные диаграммы, иллюстрирующие временное соотношение сигналов с датчиков силы обеих стелек, регистрируемых схемой, представленной на Фиг.2, в случае двигательной активности «стояние».
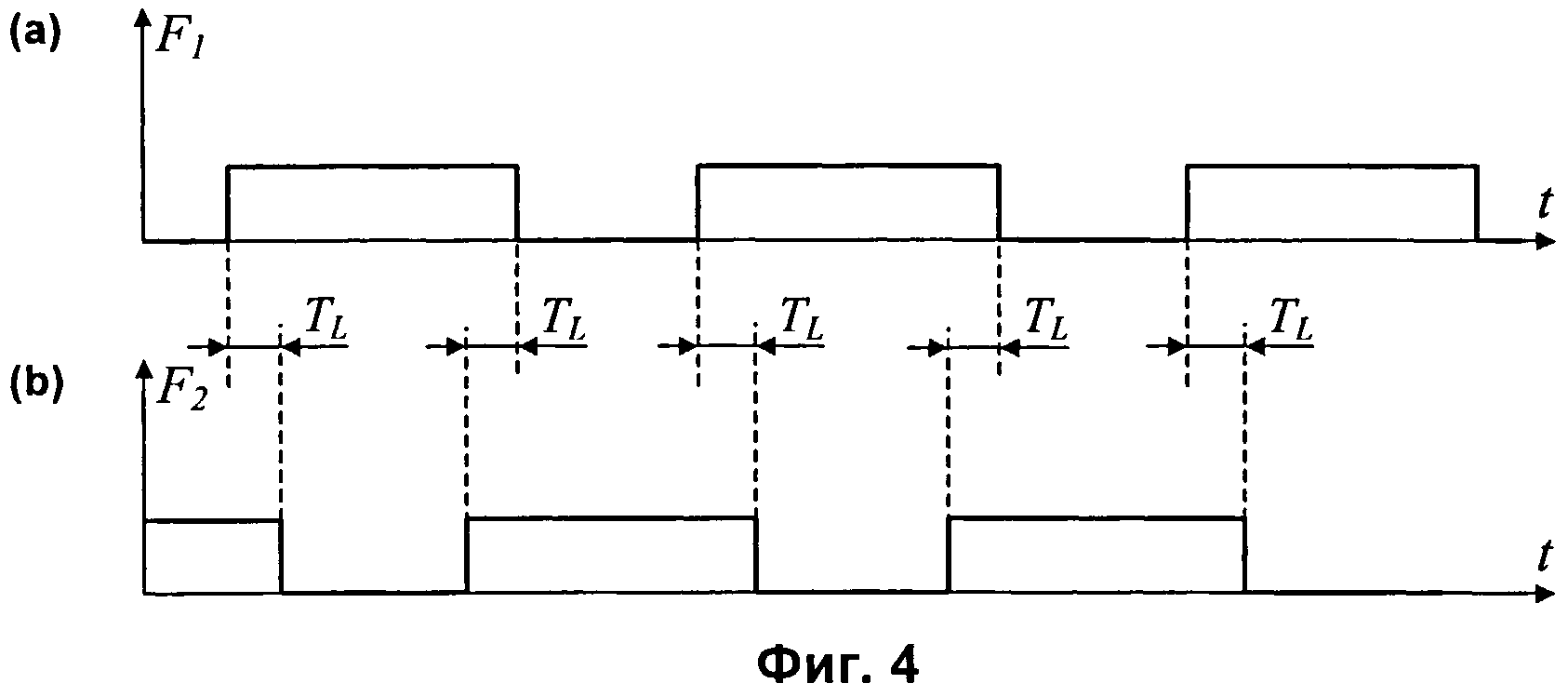
На Фиг.4 приведены примерные временные диаграммы, иллюстрирующие временное соотношение сигналов с датчиков силы обеих стелек, регистрируемых схемой, представленной на Фиг.2, в случае двигательной активности «ходьба».
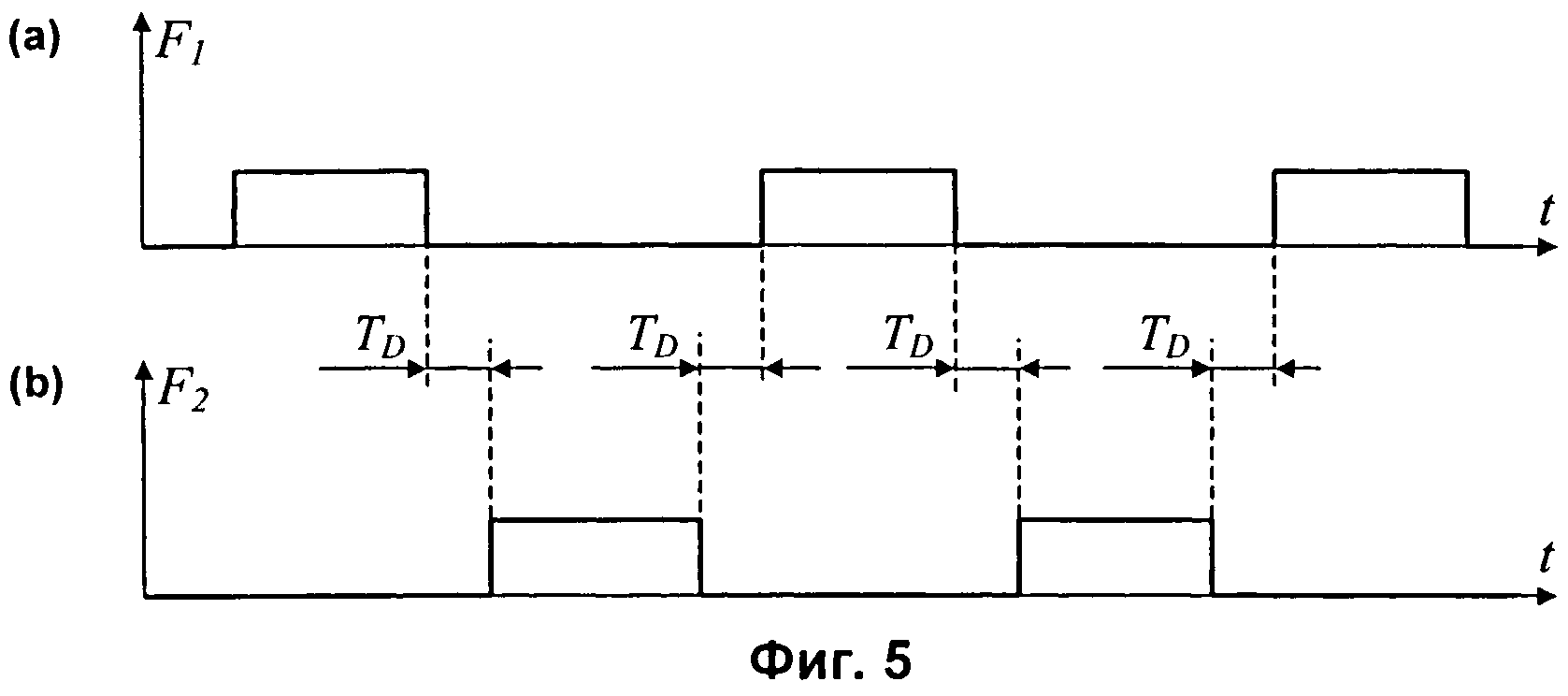
На Фиг.5 приведены примерные временные диаграммы, иллюстрирующие временное соотношение сигналов с датчиков силы обеих стелек, регистрируемых схемой, представленной на Фиг.2, в случае двигательной активности «бег».
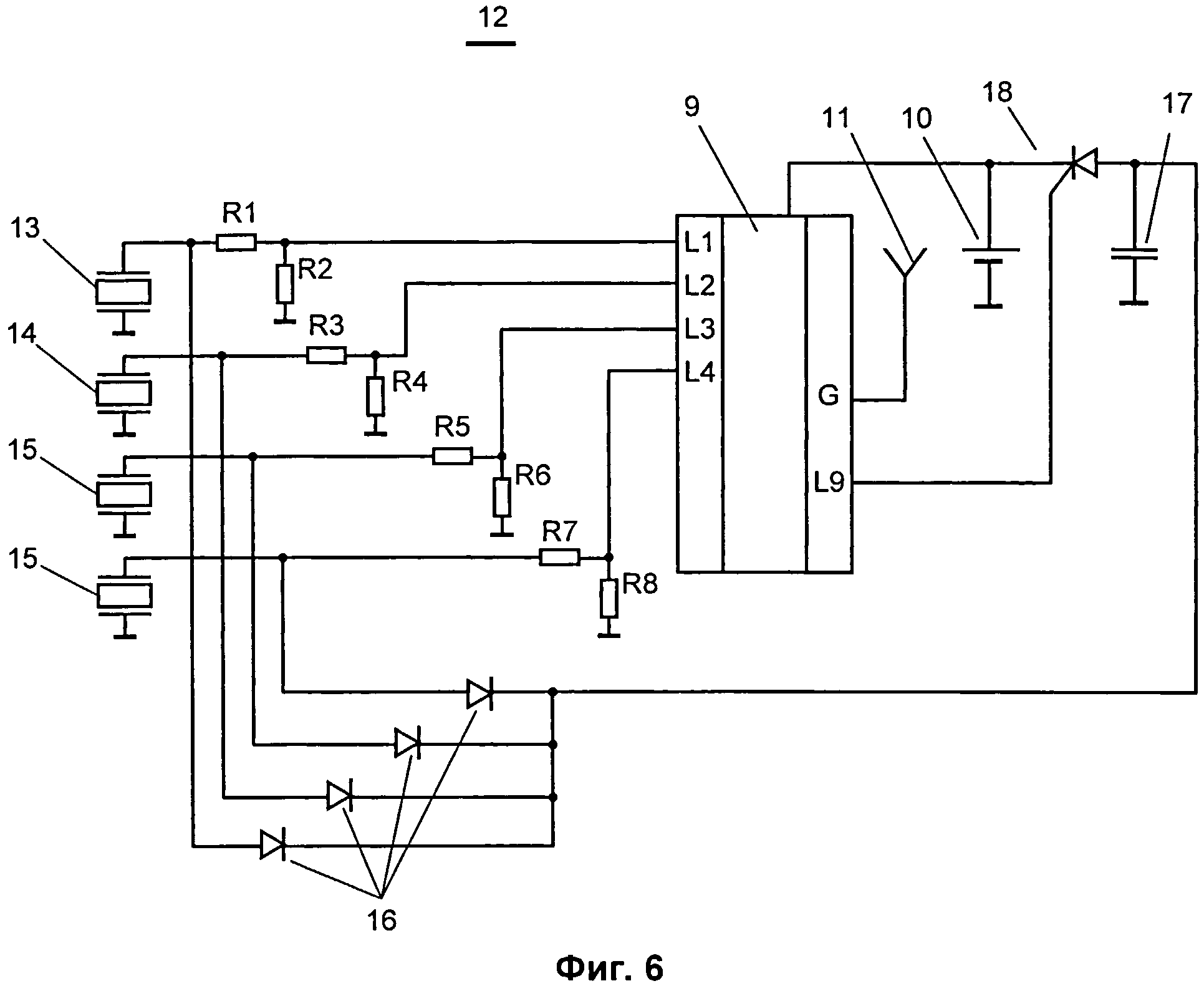
На Фиг.6 приведена электрическая схема другого примерного измерительного устройства для регистрации усилия, оказываемого стопой на датчики силы, размещенные в стельках, как это показано на Фиг.1. В данном примере каждый датчик силы выполнен в виде пьезоэлектрического преобразователя.
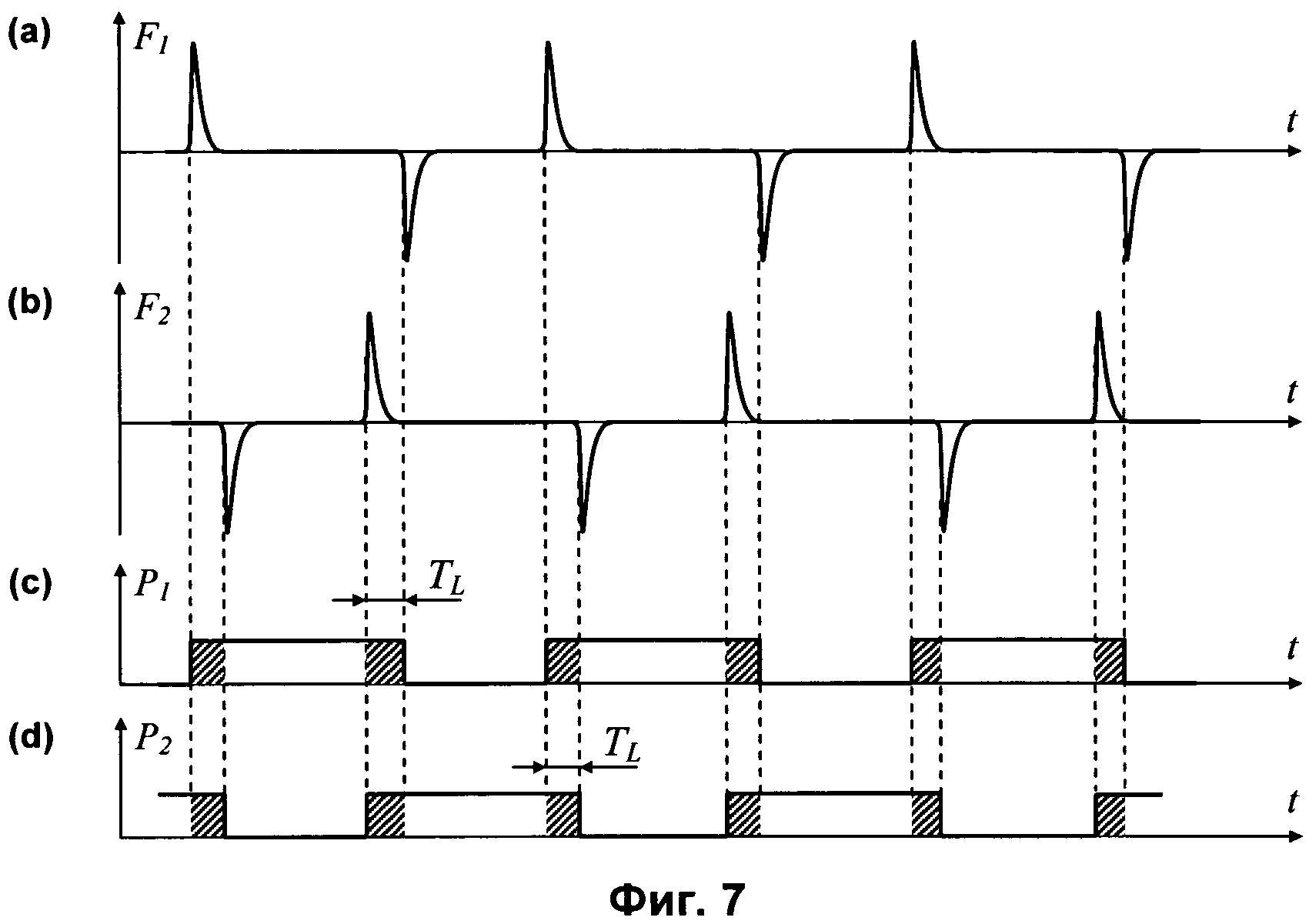
На Фиг.7 приведены примерные временные диаграммы, иллюстрирующие временное соотношение сигналов с датчиков силы обеих стелек, регистрируемых схемой, представленной на Фиг.6, в случае двигательной активности «ходьба».
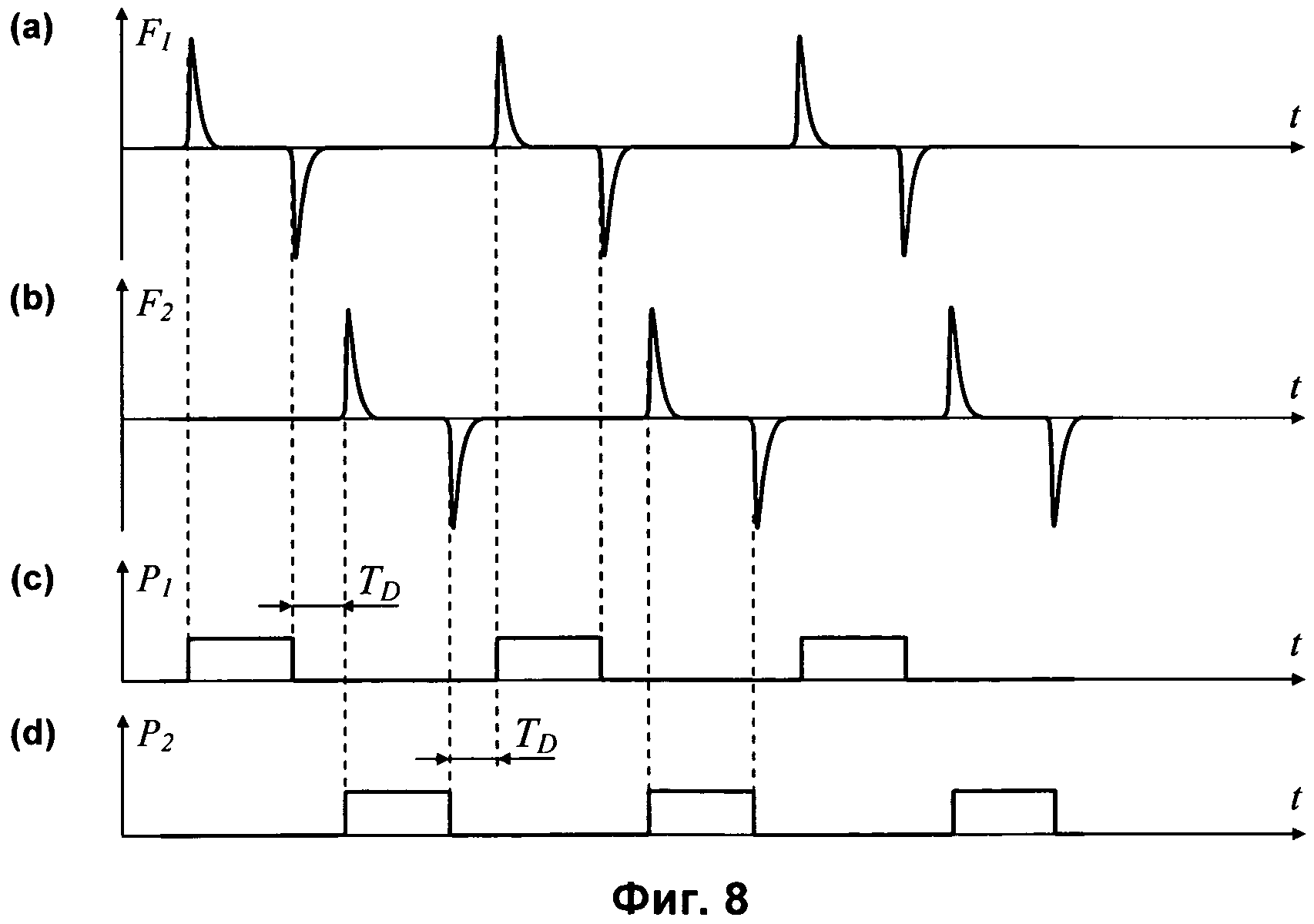
На Фиг.8 приведены примерные временные диаграммы, иллюстрирующие временное соотношение сигналов с датчиков силы обеих стелек, регистрируемых схемой, представленной на Фиг.6, в случае двигательной активности «бег».
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение иллюстрируется следующими примерами выполнения стелек с датчиками силы, в качестве которых использованы тензометрические и пьезоэлектрические преобразователи.
В первом примере каждая из стелек 1 (см. Фиг.1) включает первый датчик силы 2, расположенный в районе пятки стопы, второй датчик силы 3, расположенный в носочной части стопы, и два дополнительных датчика силы 4, расположенных по существу по траектории 5 силы реакции опоры при ходьбе. На Фиг.2 приведен пример электрической принципиальной схемы устройства 6 для регистрации усилия, оказываемого стопой на датчик силы. В данном примере датчики силы 2-4 выполнены в виде тензометрических преобразователей (тензодатчиков) 7, состоящих каждый из четырех тензорезисторов 8, включенных по известной мостовой схеме. Одна диагональ моста подключена к источнику питания 10, а другая подключена к портам ввода-вывода микроконтроллера 9, так что в итоге все четыре тензометрических преобразователя 7 (первый датчик силы 2, второй датчик силы 3 и два дополнительных датчика силы 4) оказываются подключенными к восьми портам ввода-вывода L1-L8 микроконтроллера 9, который осуществляет регистрацию аналоговых сигналов с тензометрических преобразователей 7 и преобразование их в цифровую форму. Антенный выход G микроконтроллера 9, имеющего встроенное приемопередающее устройство, подключен к антенне 11. Работа устройства 6 обеспечивается источником питания 10. Включение микроконтроллера 9 в рабочий режим осуществляется по командам внешней ЭВМ (на фигурах не показана). Внешняя ЭВМ, обеспечивающая также определение двигательной нагрузки, может быть размещена на носимом человеком устройстве.
Способ мониторинга двигательной нагрузки человека в соответствии с настоящим изобретением осуществляется следующим образом.
Регистрируют сигналы с тензодатчиков 7 (датчики силы 2-А) обеих стелек 1 с помощью устройства 6 обработки сигналов и по временному соотношению сигналов с тензодатчиков 7 правой и левой стелек 1 определяют вид двигательной активности.
Так, для такого вида двигательной активности как «стояние» характерны сигналы, показанные на Фиг.3, где график (а) соответствует сигналу F1 с тензодатчика 7 одной стельки 1, а график (b) - сигналу F2 с тензодатчика 7 другой стельки 1. При данном виде двигательной активности сигналы F1 и F2 с тензодатчиков 7 обеих стелек 1 имеют по существу не меняющиеся значения и практически полное перекрытие во времени. На Фиг.3 для примера показано, что значение сигнала F1 с тензодатчика 7 одной стельки 1 (график (а)) больше, чем значение сигнала F2 с тензодатчика 7 другой стельки 1 (график (b)). Значит, человек стоит, опираясь в большей степени на одну ногу.
Для такого вида двигательной активности как «ходьба» характерны сигналы, показанные на Фиг.4, где график (а) соответствует сигналу F1 с тензодатчика 7 одной стельки 1, а график (b) - сигналу F2 с тензодатчика 7 другой стельки 1. Для данного вида двигательной активности характерно попеременное изменение значений сигналов F1 и F2 с тензодатчиков 7 обеих стелек 1 и наличие частичного их перекрытия во времени (временной интервал перекрытия TL).
Для такого вида двигательной активности как «бег» характерны сигналы, показанные на Фиг.5, где график (а) соответствует сигналу F1 с тензодатчика 7 одной стельки 1, а график (b) - сигналу F2 с тензодатчика 7 другой стельки 1. Для данного вида двигательной активности характерно попеременное изменение значений сигналов F1 и F2 с тензодатчиков 7 обеих стелек 1 и отсутствие перекрытия их во времени. Наоборот, между этими сигналами наблюдается разрыв во времени, который обозначен как временной интервал TD.
Наличие по меньшей мере двух датчиков силы в каждой стельке - первого датчика 2 в районе пятки и второго датчика 3 в носочной части стопы - позволяет определять не только указанные виды двигательной активности (ходьбу, бег, стояние), но и другие случаи, например сидение, езду на велосипеде, ходьбу на лыжах. Однако в данном способе рассматриваются только те виды двигательной активности, при которых вес человека, включая вес носимого им отягощения, передается на стопы ног.
Ниже в таблице представлено соответствие значений сигналов с датчиков силы и их временного соотношения определенному виду двигательной активности (используется по меньшей мере два датчика в стельке).
|
Те же сигналы с датчиков силы 2, 3 и 4, которые используются для определения (идентификации) вида двигательной активности человека, используются и для определения веса человека, включая вес носимого им отягощения. Под весом носимого человеком отягощения понимается тот дополнительный вес, который человек несет на себе, например в виде переносимых вещей или специальных отягощений, которые он применяет во время тренировок.
При определении веса человека, включая вес носимого им отягощения, можно использовать экспериментально полученные изобретателями математические зависимости, учитывающие вид двигательной активности.
Так, при двигательной активности «стояние» определение веса сводится в основном к суммированию значений сигналов со всех датчиков силы 2-4 обеих стелек.
Вес человека, включая вес носимого им отягощения, при стоянии может быть определен по формуле
P=KS·FS,
где KS - калибровочный коэффициент, который определяют во время стояния для данного человека с известным весом;
FS - усредненное значение силы давления стоп при стоянии. Может определяться за определенный период времени, например за период времени от 5 с до 10 с, причем
FS=(F1max+F2max)/2,
где F1max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы одной стельки;
F2max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы другой стельки.
Калибровочный коэффициент KS, как и другие калибровочные коэффициенты, используемые при вычислении веса человека при ходьбе или беге, могут быть определены при калибровке системы. Однако они также могут определяться непосредственно во время мониторинга, когда известно, что в данный момент времени человек не несет какого-либо дополнительного отягощения, то есть датчики силы воспринимают только известный собственный вес человека.
При медленной ходьбе, с темпом ходьбы до 60 шагов в минуту, вес человека Р, включая вес носимого им отягощения, может быть определен по формуле
Р=KW·FW,
где KW - калибровочный коэффициент, который определяют при ходьбе с темпом до 60 шагов в минуту для данного человека с известным весом;
FW - усредненное значение силы давления стоп за один цикл ходьбы, причем
FW=(F1max+F2max)/2,
где F1max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы одной стельки;
F2max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы другой стельки,
при этом за цикл принимают два последовательный шага одной и другой ногой.
При ходьбе с темпом 60 и более шагов в минуту вес человека, включая носимое им отягощение, может быть определен по формуле
Р=KW·FW·(1010-1,2·V-0,026·V2)·0,001,
где KW - калибровочный коэффициент, который определяют при ходьбе с темпом до 60 шагов в минуту для данного человека с известным весом;
FW - усредненное значение силы давления стоп за один цикл ходьбы, причем
FW=(F1max+F2max)/2,
где F1max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы одной стельки;
F2max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы другой стельки;
V - число шагов в минуту,
при этом за цикл принимают два последовательный шага одной и другой ногой.
Вес человека, включая вес носимого им отягощения, при беге может быть определен по формуле
P=KR·FR·(1090-4,4·V-0,045·V2)·0,001,
где KR - калибровочный коэффициент, который определяют в процессе бега для данного человека с известным весом;
FR - усредненное значение силы давления стоп за один цикл бега, причем
FR=(F1max+F2max)/2,
где F1max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы одной стельки;
F2max - максимальное значение суммы сил давления стопы, зарегистрированных всеми датчиками силы другой стельки;
V - число шагов в минуту при данном темпе бега, при этом за цикл бега принимают два последовательных шага одной и другой ногой.
Другой пример устройства 12, предназначенного для осуществления способа с использованием пьезоэлектрических преобразователей в качестве датчиков силы, показан на Фиг.6. Правая и левая стельки 1 (см. Фиг.1), так же как и в предыдущем случае, включают первый датчик силы 2, расположенный в районе пятки стопы, второй датчик силы 3, расположенный в носочной части стопы, и два дополнительных датчика 4, расположенных по существу по траектории 5 силы реакции опоры при ходьбе. Датчики силы 2, 3 и 4 в данном примере выполнены в виде пьезоэлектрических преобразователей 13, 14 и 15 соответственно, подключенных через согласующие резисторы R1-R8 к портам ввода-вывода L1-L4 микроконтроллера 9. Антенный выход G микроконтроллера 9, так же как и в примере, проиллюстрированном Фиг.2, подключен к антенне 11.
Способ определения веса человека в соответствии с настоящим изобретением при использовании пьезоэлектрических преобразователей в качестве датчиков силы осуществляется следующим образом.
Как и в первом примере осуществления способа, регистрируют сигналы с датчиков силы 2, 3 и 4 каждой из стелек 1 - в данном случае это пьезоэлектрические преобразователи 13, 14 и 15 соответственно. На Фиг.7 приведены примерные временные диаграммы, иллюстрирующие форму и временное соотношение сигналов с датчиков силы (например, пьезоэлектрических преобразователей 13) обеих стелек при ходьбе, а на Фиг.8 - при беге. В отличие от примера с тензометрическими преобразователями 7 (см. Фиг.4 и Фиг.5) сигналы с пьезоэлектрических преобразователей, учитывая свойственную им амплитудно-частотную характеристику, имеют вид характерных выбросов, соответствующих моменту нажатия стопы на пьезоэлектрический преобразователь и моменту снятия нагрузки (сигнал обратной полярности). Принимая во внимание противоположные полярности этих выбросов, всегда можно реконструировать сигнал, соответствующий длительности опорной фазы и так же, как и в первом примере, определить соотношение во времени этих сигналов с пьезоэлектрических преобразователей обеих стелек.
Так, для такого вида двигательной активности как «ходьба» характерны сигналы, показанные на Фиг.7, где график (а) соответствует сигналу F1 с пьезоэлектрического преобразователя 13 (он же датчик 2) одной стельки 1, а график (b) - сигналу F2 с пьезоэлектрического преобразователя 13 (он же датчик 2) другой стельки 1. На графиках (с) и (d) Фиг.7 показаны сигналы P1 и Р2, соответствующие длительности давления стопы на пьезоэлектрические преобразователи 13 одной и другой стелек 1 соответственно. Передний фронт сигналов P1 и Р2 на графиках (с) и (d) на Фиг.7 соответствует сигналам F1 и F2 положительной полярности на графиках (а) и (b) Фиг.7 соответственно, а задний фронт сигналов P1 и Р2 на графиках (с) и (d) Фиг.7 соответствует сигналам F1 и F2 отрицательной полярности на графиках (а) и (b) Фиг.7 соответственно. Для данного вида двигательной активности «ходьба» характерно попеременное изменение значений сигналов, показанных на графиках (с) и (d), и наличие их частичного перекрытия (временной интервал перекрытия TL).
Аналогично, для такого вида двигательной активности как «бег» характерны сигналы, показанные на Фиг.8, где график (а) соответствует сигналу F1 с пьезоэлектрического преобразователя 13 (он же датчик 2) одной стельки 1, а график (b) - сигналу F2 с пьезоэлектрического преобразователя 13 (он же датчик 2) другой стельки 1. На графиках (с) и (d) Фиг.8 показаны сигналы Р1 и Р2, соответствующие длительности давления стопы на пьезоэлектрические преобразователи 13 одной и другой стелек 1 соответственно. Передний фронт сигналов Р1 и Р2 на графиках (с) и (d) Фиг.8 соответствует сигналам F1 и F2 положительной полярности на графиках (а) и (b) Фиг.8 соответственно, а задний фронт сигналов Р1 и Р2 на графиках (с) и (d) Фиг.8 соответствует сигналам F1 и F2 отрицательной полярности на графиках (а) и (b) Фиг.8 соответственно. Для данного вида двигательной активности «ходьба» характерно попеременное изменение значений сигналов, показанных на графиках (с) и (d), и отсутствие их перекрытия во времени. Наоборот, между этими сигналами наблюдается разрыв во времени, который обозначен как временной интервал TD.
Для определения веса человека, включая вес носимого им отягощения, можно воспользоваться математическими соотношениями, приведенными для первого примера осуществления способа в соответствии с настоящим изобретением. При этом в качестве упомянутых сил давления стоп на датчики силы, расположенные в стельках, используют значения максимумов сигналов F1 и F2, регистрируемых с пьезоэлектрических преобразователей. Для случая, когда человек стоит, его вес определяется по значениям сигналов F1 и F2, полученных с пьезоэлектрических преобразователей в начале этого вида двигательной активности «стояние» и после его окончания. В остальном осуществление способа аналогично первому примеру.
Устройства 6 (Фиг.2) и 12 (Фиг.6), равно как и их части, могут быть размещены в стельке 1 вместе с соответствующими датчиками силы. Электропитание устройств обеспечивается батареей 10, в качестве которой может быть использован перезаряжаемый аккумулятор. Дополнительно, как это показано на примере устройства 12 (см. Фиг.6), в состав устройства может входить цепь подзарядки аккумулятора 10 во время хождения или бега человека. Такая цепь подзарядки включает диоды 16 по числу используемых пьезоэлектрических преобразователей 13-15, накопительный конденсатор 17 и тиристор 18, управляющий вход которого подключен к порту ввода-вывода L9 микроконтроллера 9. Один конец каждого диода 16 подсоединен к соответствующему пьезоэлектрическому преобразователю 13-15, а все другие объединены и подсоединены к конденсатору 17. На время подзарядки микроконтроллер 9 отключает режим регистрации сигналов, вызванных давлением стопы на пьезоэлектрические преобразователи, и эти сигналы через диоды 16 подзаряжает конденсатор 17. В этом режиме микроконтроллер 9 открывает тиристор 18, подсоединяя тем самым заряженный конденсатор 17 к аккумулятору 10. Таким образом во время ходьбы или бега человека, в обуви которого размещена стелька с пьезоэлектрическими преобразователями 13-15 и устройством 12, происходит подзарядка аккумулятора 10.
Способ в соответствии с настоящим изобретением позволяет в реальном времени определять вес человека, учитывая при этом вид двигательной активности и вес носимого им отягощения.
Кроме того, данные, регистрируемые установленными в стельках датчиками силы, как это описано выше, могут быть также использованы для выявления дефектов опорно-двигательной системы человека, плоскостопия, определения наклона поверхности (передвижения) и ее твердости, удобства носимой обуви, распознавания походки, характерной для человека и т.д. Способ позволяет также непрерывно контролировать темп передвижения, скорость и ускорения движения человека, пройденное расстояние, время движения.
Способ создания локационного изображения повышенной яркости и контрастности и устройство для его реализации
Устройство преобразования энергии статического электричества
Способ информационного поиска (варианты) и компьютерная система для его осуществления
Датчик для измерения импеданса участка тела человека
Способ определения количества энергии, поступающей с пищей в организм человека
Способ определения фазы сна человека, благоприятной для пробуждения
Устройство для измерения электрических параметров участка тела человека
Устройство для регистрации сигналов пульсовой волны и дыхательного цикла человека
Способ мониторинга двигательной нагрузки человека и стелька, предназначенная для его осуществления
Способ вибромассажа ступней человека и стелька для его осуществления
Способ создания локационного изображения повышенной яркости и контрастности и устройство для его реализации
Устройство преобразования энергии статического электричества
Способ информационного поиска (варианты) и компьютерная система для его осуществления
Датчик для измерения импеданса участка тела человека
Способ определения количества энергии, поступающей с пищей в организм человека
Способ определения фазы сна человека, благоприятной для пробуждения
Устройство для измерения электрических параметров участка тела человека
Устройство для регистрации сигналов пульсовой волны и дыхательного цикла человека
Способ мониторинга двигательной нагрузки человека и стелька, предназначенная для его осуществления
Способ вибромассажа ступней человека и стелька для его осуществления

