РОБОТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЛАПАРОСКОПИЧЕСКОЙ ХИРУРГИИ
Вид РИД
Изобретение
Область техники
Настоящее изобретение касается роботизированной системы для удерживания и манипулирования хирургическим приспособлением или инструментом для хирургии, в частности, для минимально инвазивной лапароскопической хирургии. Роботизированная система данного изобретения содержит опорную структуру, к которой подвижным образом прикреплены одна или более рук, которые могут управляться удаленным образом от телеуправляемой станции.
Каждая из упомянутых рук, прикрепленных к опорной структуре, сконструирована в виде сочлененного сборного узла, содержащего два элемента. Оба элемента шарнирно соединяются друг с другом, и, в свою очередь, первый элемент может вращаться относительно опорной структуры.
Уровень техники
Данное изобретение находит общее применение в области роботизированной хирургии и, в частности, в области минимально инвазивной хирургии. В минимально инвазивной хирургии делают меньшие разрезы по сравнению с разрезами в обычной хирургии, что требует очень точной работы хирургического инструмента. Через эти разрезы выполняют хирургические операции, включая введение видеокамер (лапароскопия) для получения изображений внутренних органов и передачи их на телевизионный монитор, посредством которого хирург может управлять выполнением таких хирургических процедур.
Эти хирургические процедуры в роботизированной хирургии выполняют удаленным образом, используя станции телеуправления, соединенные с роботизированной системой выделенными линиями связи.
Роботизированные системы включают в себя структуры, разработанные так, чтобы вести себя подобно руке человека, позволяя руке робота находиться в разных положениях. Эти структуры образуют с помощью одной или нескольких рук, установленных на опорной структуре и образованных с помощью шарнирно-соединенных элементов, поэтому они могут двигаться надлежащим образом в пространстве, направляя инструмент, терминальный орган или рабочий орган, такой как захват или другое устройство, для выполнения хирургических операций. Движение вызывается командами, которые удаленным образом принимают от станции телеуправления.
Каждая из упомянутых рук имеет сочлененную структуру, содержащую несколько элементов, подвижно соединенных друг с другом и вращательно прикрепленных к опорной структуре. Одним примером структуры руки робота с сочлененными элементами является робот, известный как Scara, со свободой движения в Х и Y осях, хотя они ограничены в их движениях в вертикальной оси Z, где обычно выполняются простые и короткие по расстоянию процедуры.
Ограничения этих структур обычно преодолевают путем интенсивного использования сложной электроники и механизмов, чтобы обеспечить роботизированную систему, пригодную для минимально инвазивной хирургии. Это дает нежелательно дорогостоящую роботизированную систему из-за ее сложности как целого.
Документ US2003208186 описывает роботизированный механизм с тремя степенями свободы, содержащий опорную структуру, к которой рука прикреплена вертикально скользящим образом. Данная рука содержит первый элемент и второй элемент, шарнирно соединенные друг с другом. Первый элемент, в свою очередь, шарнирно присоединен к опорной структуре, и посредством этого может позиционироваться инструмент. Однако такая структура имеет тот недостаток, что она не позволяет располагать инструмент надлежащим образом, чтобы вводить его с помощью хирургического инструмента (троакара).
Документ US5762458 касается системы для выполнения процедур минимально инвазивной сердечной хирургии. Эта система содержит сочлененные руки, приспособленные манипулировать инструментом в пространстве. Упомянутые руки имеют несколько степеней свободы, и в одном варианте осуществления они оборудованы тремя моторно-движимыми соединениями (которые могут задавать перемещение и вращение), двумя пассивными соединениями и одним моторно-движимым соединением, которое может поворачиваться для движения инструмента, расположенного на конце руки. Эта роботизированная система имеет тот недостаток, что она не позволяет полностью эффективное расположение инструмента через разрез в пациенте.
Сущность изобретения
Настоящее изобретение обеспечивает роботизированную систему для лапароскопической хирургии, в частности, но не исключительно, для минимально инвазивной хирургии. Роботизированная система данного изобретения имеет существенно более простую конструкцию, чем роботизированные системы, используемые до сих пор для этой цели. В дополнение к структурной простоте обеспеченной здесь роботизированной системы данное изобретение предлагает роботизированную систему для лапароскопической хирургии с особой архитектурой, способной к надлежащему расположению инструмента, терминального органа или рабочего органа, такого как захват или устройство для выполнения хирургических операций, с высокой подвижностью для надлежащего введения через разрез в пациенте.
Роботизированная система для минимально инвазивной лапароскопической хирургии данного изобретения содержит опорную структуру, содержащую вертикальную колонну, вокруг продольной оси которой могут вращаться руки. Данная колонна может устанавливаться на стационарную платформу, которая предпочтительно оборудована колесами для легкого передвижения, если необходимо. Одна или несколько роботизированных рук скользящим образом крепятся вертикально к колонне. В случае, когда больше чем одна роботизированная рука обеспечивается на опорной структуре, упомянутые руки крепятся так, что они могут скользящим образом перемещаться вертикально, чтобы регулировать их высоту относительно пола и, следовательно, позволять хирургическому инструменту эффективно располагаться в надлежащем положении.
Каждая рука роботизированной системы содержит первый элемент и второй элемент. И первый и второй элементы шарнирно соединяются друг с другом посредством вала или сочленения. С другой стороны, первый элемент руки вращательным образом устанавливается на опорной структуре, и, в свою очередь, упомянутый первый элемент приспособлен поворачиваться вокруг ее продольной оси. В частности, первый элемент руки вращательным образом устанавливается на удлинении, составляющем одно целое с опорной структурой.
Второй элемент роботизированной руки приспособлен принимать сочленение с, по меньшей мере, двумя пассивными степенями свободы на одном своем конце для крепления хирургического орудия или инструмента. В случае, когда обеспечивается больше чем одна роботизированная рука, данные руки могут вращаться независимо друг от друга вокруг продольной оси опорной структуры. Эта архитектура обеспечивает существенно упрощенное сборное устройство.
В некоторых вариантах осуществления данного изобретения упомянутое сочленение, имеющее, по меньшей мере, две степени свободы для прикрепления инструмента, может иметь три степени свободы, как соединение карданного типа. Таким образом, достигаются одноосная устойчивость (обычно по направлению оси инструмента или орудия) и пространственное движение, подходящее для операций инструмента через разрез в пациенте, путем введения двух пассивных степеней свободы в системе.
Таким образом, данное сборное устройство обеспечено всего пятью степенями свободы (четыре плюс вертикальное расположение опорной структуры для расположения и маневренности инструмента), поэтому инструмент может всегда располагаться в направлении, заданном местом проникновения в полость, сделанном в пациенте (например, брюшной полости) через троакар.
В одном варианте осуществления продольная ось первого элемента роботизированной руки может быть, по меньшей мере, по существу, перпендикулярна оси сочленения первого элемента и второго элемента.
Второй элемент руки может содержать два стержня, расположенных, по существу, параллельно друг другу и разделенных расстоянием, подходящим для его обеспечения и шарнирного крепления на одном конце первого элемента руки. Это позволяет вращение без столкновения первого и второго элементов роботизированной руки.
Другие задачи, преимущества и признаки роботизированной системы для минимально инвазивной лапароскопической хирургии данного изобретения будут видны из описания предпочтительного варианта осуществления изобретения. Это описание дано в качестве не ограничивающего примера и иллюстрируется сопровождающими чертежами.
Краткое описание чертежей
На чертежах:
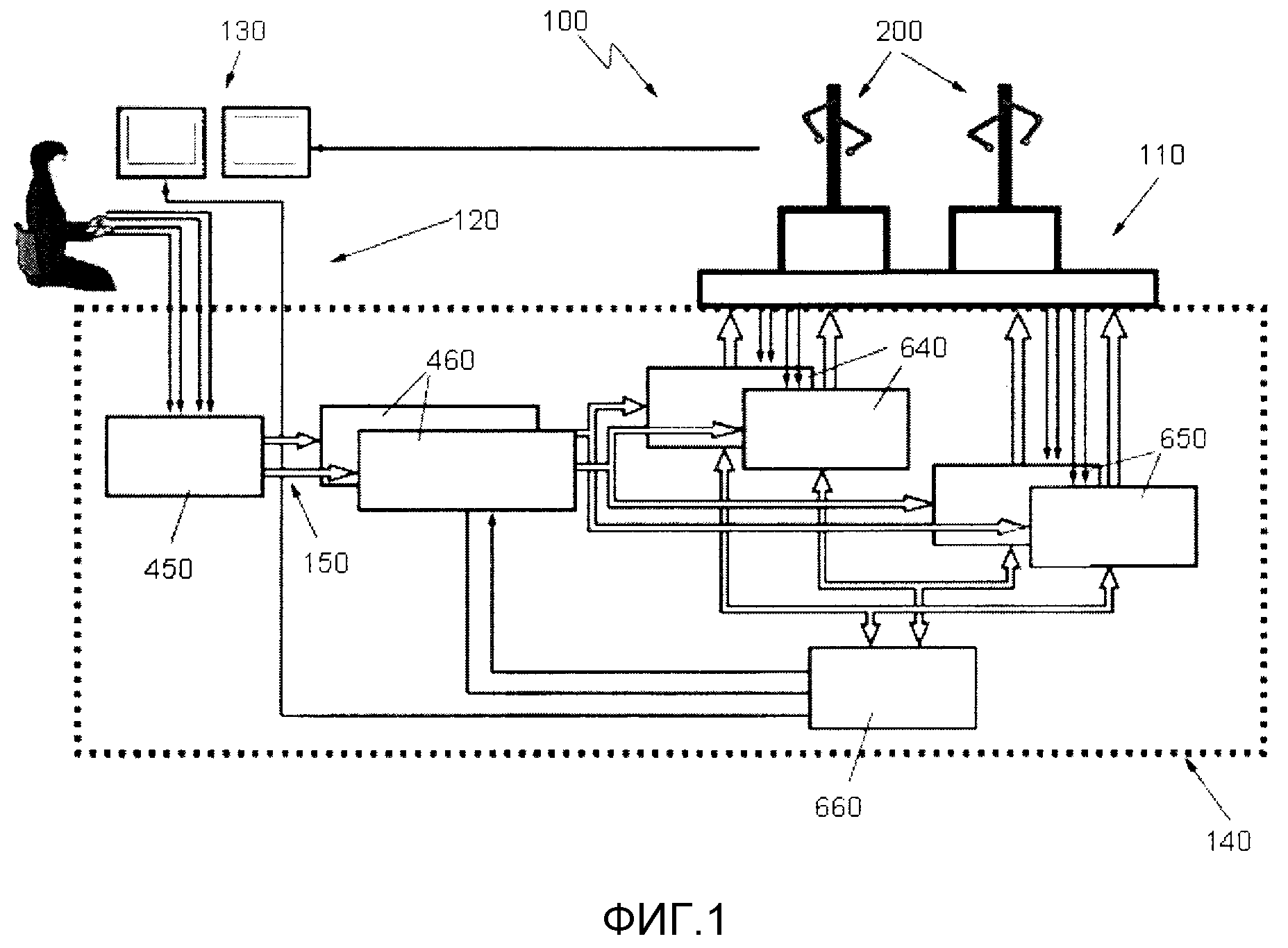
фигура 1 представляет собой изображение системы телеуправления, сопряженной с роботизированными системами согласно данному изобретению;
фигура 2 представляет собой вид в перспективе одного варианта осуществления роботизированной системы данного изобретения, содержащей двуручную структуру;
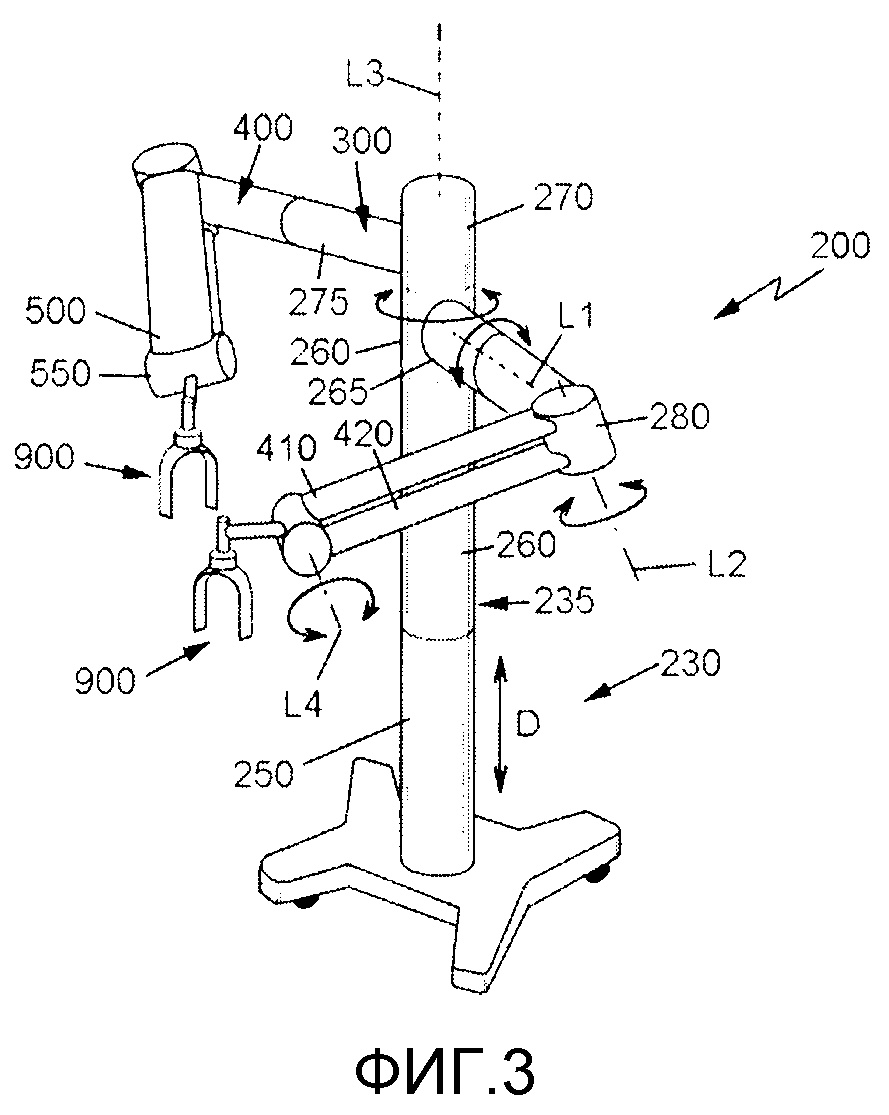
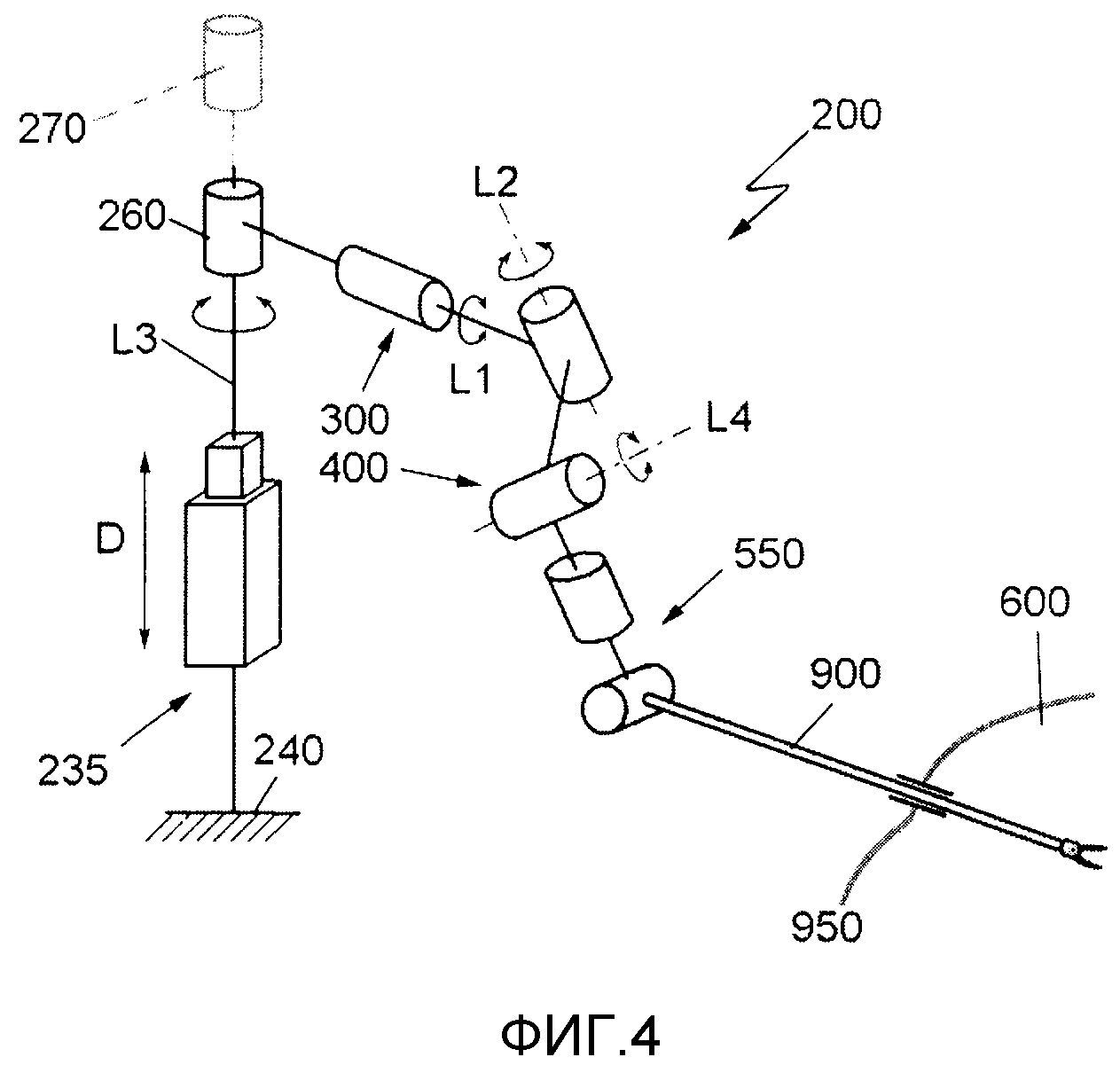
фигура 3 представляет собой вид в перспективе одного варианта осуществления роботизированной системы данного изобретения, и
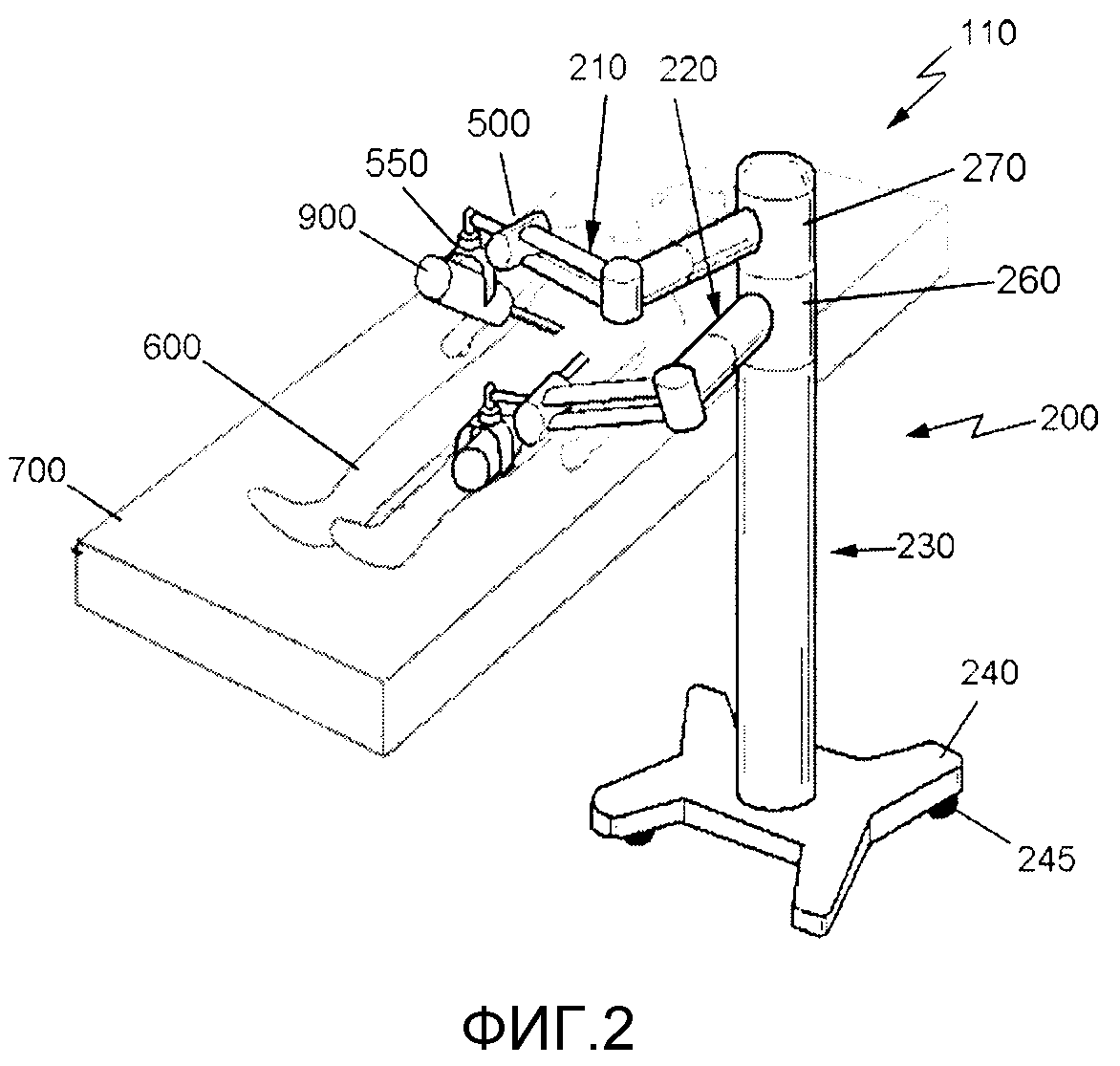
фигура 4 представляет собой схематичное изображение кинематической цепи роботизированной системы, где показаны степени свободы.
Описание одного предпочтительного варианта осуществления
Телеуправляемая система 100 для выполнения минимально инвазивной лапароскопической хирургии показана на чертежах. Телеуправляемая система 100 содержит рабочую станцию 110, имеющую две роботизированные системы 200 согласно данному изобретению, и станцию 120 телеуправления для управления и контроля роботизированной системы 200. Станция 120 телеуправления включает в себя систему 130 трехмерного контроля для отображения рабочей сцены с желаемым показателем увеличения (масштабирование) и перспективой, которая может регулироваться при движениях одной из доступных рук.
Контрольные команды оператора могут конвертироваться станцией 120 телеуправления в операцию роботизированной системы 200, увеличивая мануальные способности оператора, и операции могут контролироваться более надежно. Это позволяет сочлененным роботизированным рукам 210, 220 роботизированной системы 200 действовать жестами и контролироваться движениями рук оператора. Движения, которые оператор может выполнять его/ее двумя кистями, могут передаваться к любой из рук 210, 220, по желанию, с помощью дополнительных приводных педалей (не показаны). Роботизированные руки 210, 220 роботизированной системы 200 (показаны на фигуре 3) могут приводиться в действие электрически для размещения и расположения каждого из инструментов, терминальных органов или рабочих органов 900 (таких как захваты или хирургические устройства, подходящие для выполнения операций).
Связь между станцией 120 телеуправления и роботизированной системой 200 выполняется посредством контрольного блока 140. Контрольный блок 140 организован с помощью компьютерной сети, которая делает возможным контроль в реальном времени траектории роботизированных рук 210, 220 и положения хирургических инструментов 900, управляемых руками 210, 220, так что они все время соответствуют движениям команд оператора. Контрольный блок 140 также выполняет координацию движений, чтобы избежать столкновений между руками 210, 220, и непрерывно отслеживает и корректирует их траектории согласно критериям, заданным оператором. Контрольный блок 140 делает возможной работу с плавающими осями координат, которые устанавливаются в положение и ориентацию по желанию оператора, чтобы облегчить выполнение задачи в положении вертикального поля, хотя операция выполняется в брюшной полости пациента 600 в других положениях. Он также позволяет изменять показатель масштаба, чтобы приспособить сантиметровые движения в приводной станции в миллиметровые движения по необходимости. Этот блок 140 дополнительно позволяет сдерживать рабочую нагрузку каждой из рук 210, 220 заданной, чтобы увеличить безопасность пациента 600. Посредством блока 140 также можно отображать используемое рабочее пространство рук 210, 220, чтобы облегчить их начальное надлежащее расположение над операционным столом 700 и над пациентом 600.
Сигнал 150, принятый от станции 120 телеуправления через магнитные датчики 450 положения, обеспечивает информацию 460 о траекториях инструментов 900. Другие средства детектирования положения, такие как потенциометрические или инерционные датчики, также возможны. Это позволяет облегчать способность движения оператора, а также избегать механического стеснения наиболее обычных 6D приводов. Таким образом, делается возможным управление 640 роботизированной системой 200 и управление 650 инструментами 900, а также управление 660 избежания столкновений.
Рабочая станция 110 содержит одну или более роботизированных систем 200 согласно данному изобретению. Фигура 3 показывает одну из упомянутых роботизированных систем 200 в деталях. Как можно видеть, каждая роботизированная система 200 содержит две руки 210, 200, установленные на общей опорной структуре 230. Каждая рука 210, 220 имеет такую нагрузочную способность, что могут прикладываться усилия до 2,5 кг, и приспособлена оперировать у операционного стола 700, на одной его стороне или одновременно используя обе стороны, на каждой стороне операционного стола 700. Руки 210, 220 роботизированной системы 200 могут двигаться в пространстве, покрывая соответствующий минимальный рабочий объем. Рабочий объем задается установкой точек, где инструмент 900 каждой руки 210, 220 может находиться, и соответствует объему, ограниченному поверхностями, заданными точками, достижимыми инструментом 900 при полностью выдвинутой и полностью втянутой его структуре. В структуре данного варианта осуществления минимальный рабочий объем соответствует полусфере радиусом 50 см, центрически расположенной на одном фиксированном центре, но регулируемой в высоту, с точностью лучше чем 1 мм.
В варианте осуществления, показанном на фигурах 2 и 3, опорная структура 230 содержит вертикальную колонну 235, закрепленную на платформе 240, имеющей блокируемые колеса 245 для легкости передвижения. Платформа 240 содержит нижнюю секцию 250 и две верхние секции 260, 270, установленные друг на друге и на нижней секции 250 с возможностью вращения. Нижняя часть 250 опорной структуры 230 прикреплена к платформе 240 для удерживания роботизированной системы 200 во время операции. Верхние секции 260, 270 колонны 235 установлены так, что они могут скользить вертикально соответственно вертикальному направлению, указанному буквой D, то есть, по существу, перпендикулярно платформе 240 опорной структуры 230. Вертикальное линейное смещение D верхних секций 260, 270 позволяет независимо регулировать высоту роботизированных рук 210, 220 относительно пола и, таким образом, надлежащим образом позиционировать инструмент 900.
Для простоты описания структура одной из рук 210 роботизированной системы 200 будет описана ниже, хотя будет понятно, что каждая из рук 210, 220 имеет одинаковую или технически эквивалентную конфигурацию.
Роботизированная рука 210 системы, описываемой согласно данному изобретению, содержит два элемента 300, 400, сочлененных друг с другом.
Первый элемент 300 представляет собой удлиненное тело, которое установлено на опорной структуре 230 так, что оно может поворачиваться вокруг продольной оси L1 первого элемента 300. Более конкретно, первый элемент 300 установлен с возможностью вращения на удлинение 265, составляющее одно целое с верхней секцией 260 (другая роботизированная рука 220 установлена с возможностью вращения на удлинение 275, соответствующее верхней секции 270). Первый элемент 300 может, таким образом, вращаться относительно удлинения 265 верхней секции 260 роботизированной руки 210 вокруг продольной оси L1, и обе руки 210, 220 могут вращаться независимо вокруг продольной оси L3 опорной структуры 230, то есть колонны 235.
Второй элемент 400 роботизированной руки 210 сочленяется с первым элементом 300 роботизированной руки 210 посредством сочленения 280 так, что они могут поворачиваться вокруг оси L2, как можно видеть на фигуре 3. Продольная ось L1 первого элемента 300, по существу, перпендикулярна оси L2 сочленения 280 первого элемента 300 и второго элемента 400.
Как можно видеть, второй сочлененный элемент 400 образован из двух стержней 410, 420, которые в варианте осуществления на данных фигурах имеют эллиптическое поперечное сечение. Будет понятно, однако, что два стержня 410, 420 могут иметь другие различные геометрии. Два стержня 410, 420 расположены параллельно друг другу, разделенные заданным расстоянием, чтобы позволить второму элементу 400 присоединяться к одному концу первого элемента 300, в то же время предохраняя оба элемента 300, 400 руки 210 от столкновения друг с другом при вращении вокруг оси L2 сочленения 280, расположенного на общем конце обоих стержней 410, 420 руки 210.
Противоположный конец 500 обоих стержней 410, 420 руки 210 приспособлен для крепления хирургического орудия или инструмента 900 через поворотную ось L4. Поворотная ось L4 предотвращает столкновения между инструментом 900 и стержнями 410, 420 второго элемента 400 рук 210, 220. На конце 500 обеспечено механическое сочленение 550, которое позволяет регулировать расположение инструмента 900 внутри рабочего пространства надлежащим образом для операций сквозь разрез в пациенте 600. Это механическое сочленение 550 представляет собой соединение, имеющее две или больше степеней свободы, приспособленное для крепления хирургического орудия или инструмента 900. В варианте осуществления на данных фигурах механическое сочленение 550 представляет собой соединение, имеющее три степени свободы, такое как соединение карданного типа. Это позволяет вводить две дополнительные пассивные степени свободы, а также обеспечивать одноосную устойчивость (обычно ось позиционирования инструмента 900). Инструмент 900 может, следовательно, располагаться всегда в направлении, заданном местом проникновения 950 в полость, сделанным в пациенте 600 (например, брюшная полость), как показано на фигуре 4.
Может быть обеспечен элемент крепления с ручной подстройкой для троакаров. Этот элемент крепления содержит элемент подвески, который может быть прикреплен вручную к опорной структуре 230. На одном его конце два элемента, прикрепленных к этому элементу подвески, поддерживаются двумя шаровыми соединениями, запираемыми вручную, что позволяет соответствующим троакарам прикрепляться через соединение карданного типа для снижения усилий, прилагаемых хирургическим инструментом или орудием 900 к животу 600 пациента.
Фигура 4 схематично показывает кинематическую цепь механической структуры одного варианта осуществления роботизированной системы 200 данного изобретения. Как показано, каждая рука 210, 220 системы 200 находится в открытой кинематической цепи типа D-G-G-G-G+кардан с пятью степенями свободы, позволяя относительное движение разных элементов 235, 300, 400, 900 между каждыми двумя последовательными связями структуры.
Отдельно от призматического соединения (вертикальное передающее движение) четыре соединения согласно осям L1, L2, L3 и L4 приводятся двигателем с перемещением D, которое также осуществляют две руки 210, 220.
Хотя настоящее изобретение было представлено в описании и показано на сопроводительных чертежах со ссылкой на предпочтительный вариант осуществления изобретения, роботизированная система согласно изобретению может подвергаться некоторым изменениям без отступления от объема защиты, определенного в следующей формуле изобретения.
Минимально инвазивные лапароскопические хирургические щипцы
Потолок для создания ламинарного воздушного потока для операционной
Минимально инвазивные лапароскопические хирургические щипцы
Потолок для создания ламинарного воздушного потока для операционной

