Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области космонавтики, а именно к определению параметров орбиты космического объекта (КО), например, космического мусора, бортовыми средствами космического аппарата (КА).
Изобретение может быть использовано при обеспечении безопасности полетов КА путем обнаружения и точного определения средствами бортового комплекса параметров движения потенциально опасных КО, оценки динамики сближений КА и КО и определения необходимости выработки импульса корректирующего маневра уклонения КА от КО.
Известен «Способ определения параметров орбиты космического аппарата» патент RU №2150414, опубликовано 10.06.2000 - (Д1), заключающийся в выполнении измерений траекторных параметров, передаче на комплекс управления совокупности измеренных значений траекторных параметров с последующим их накоплением и обработкой по методу наименьших квадратов. Причем после окончания итерационного процесса исключают отдельные аномальные значения, корректируют точность измерений обрабатываемых траекторных параметров, после чего циклически повторяют обработку до ее завершения и получения оптимальной оценки орбитальных параметров движения КА в зоне измерений выполненного сеанса связи. Основным недостатком способа является низкая оперативность траекторных измерений параметров космического объекта и, следовательно, расчета орбитальных данных из-за ограничения зон радиовидимости объекта наземными средствами и циклического повторения обработки вычислений.
Известен «Параллактический способ определения координат объекта» патент RU №2027144, опубликовано 20.01.1995 - (Д2), основанный на применении бинокулярной системы оптических датчиков, разнесенных на базовое расстояние относительно друг друга и имеющих параллельные оптические оси. Технические средства, реализующие данный способ, описаны в источниках информации: «Распознавание в системах автоконтроля» / Шибанов Г.П., М.: Машиностроение, 1973, с.176-188 - (Д3); «Голографическое опознавание образов» / Василенко Г.И., М.: Советское радио, 1977, рис.4.21, с.282-283 - (Д4). Данный способ позволяет на основе измеренного параллактического смещения треков прохождения космических объектов, зафиксированных в ПЗС-матрицах (ПЗС-приборы с зарядовой связью) осуществлять определение расстояний - Δr (фиг.1) между космическим аппаратом и космическим объектом и угла - β (фиг.2, фиг.3) между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта. Основным недостатком способа является сравнительно низкое быстродействие при определении орбитальных параметров в связи с использованием вычислительных алгоритмов, связанных с необходимостью проведения итерационных расчетов при решении краевых задач.
Наиболее близким по совокупности существенных признаков к изобретению является способ, описанный в научном журнале «Американского Института Аэронавтики и Астронавтики» (US) в публикации Mark Psiaki «Autonomous orbit determination for two spacecraft from relative position measurements)) за номером AIAA-98-4560, опубликовано 10.08.1998 - (Д5), его адрес в Интернете http://arc.aiaa.org/doi/abs/10.2514/6.1998-4560. В данном способе используют измерения расстояния и бокового смещения космического аппарата относительно второго космического аппарата, определение расстояний между которыми осуществляют с помощью лазерных дальномеров. По совокупности существенных признаков этот способ выбран в качестве прототипа к изобретению. Основным недостатком, ограничивающим применение данного способа, является обязательное наличие средств лазерной локации на обоих космических объектах.
В изобретении данная проблема решена применением бинокулярной системы оптических датчиков, располагаемых на борту КА.
Сущность изобретения заключается в вычислении параметров орбиты космического объекта: фокального параметра - P(ti), истинной аномалии - ϑ(ti), эксцентриситета - e(ti) и наклонения орбиты - iко космического объекта в момент времени ti в соответствии с полученными аналитическим методом математическими зависимостями. При этом расчеты проводятся по полученным аналитическим формулам без использования итерационных вычислительных процессов. Исходной информацией являются определения абсолютной величины и ориентации вектора, соединяющего центр масс управляемого КА и положение КО.
Также сущность заявленного способа определения параметров орбиты космического объекта заключается в определении на борту космического аппарата в моменты времени ti, где i=1, 2, 3, …, значений радиус-вектора, соединяющего центр Земли с местоположением космического аппарата - rка(ti), значений широты подспутниковых точек космического аппарата - φка(ti), значений расстояния между космическим аппаратом и космическим объектом - Δr(ti), значений угла между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта β(ti), при этом дополнительно определяют в моменты времени ti бортовыми оптическими датчиками угол между направлением от космического аппарата до космического объекта и местным горизонтом, лежащим в плоскости, образованной положениями космического аппарата, космического объекта и центром Земли - θ(ti), вычисляют значения радиус-вектора - rко(ti) космического объекта, соединяющего центр Земли с положением космического объекта в момент времени ti и угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени ti - δr(ti) в соответствии с математическими зависимостями:
 ,
,
 ,
,
где:
rкa(ti) - радиус-вектор космического аппарата, соединяющий центр Земли с положением космического аппарата в момент времени ti;
Δr(ti) - расстояние между центрами масс космического аппарата и космического объекта в момент времени ti;
θ(ti) - угол между направлением от космического аппарата до космического объекта и местным горизонтом, лежащим в плоскости, образованной положениями космического аппарата, космического объекта и центром Земли в момент времени ti;
δr(ti) - угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени ti,
вычисляют угловое расстояние между положениями космического объекта - Δν(ti, ti+1) для двух следующих друг за другом моментов времени измерений ti и ti+1 по формуле:
Δν(ti,ti+1)=arccos[cosσ(ti)cosδr(ti+1)-sinσ(ti)sinδr(ti+1)cosα(ti)],
где:
σ(ti)=arccos[cosδr(ti)cosδrка(ti)-sinδr(ti)sinδrка(ti)cosβ(ti)];
α(ti)=π-β(ti+1)-δ(ti);
 ;
;
σ(ti) - угловое расстояние между положением космического аппарата в момент времени ti+1 и космического объекта в момент времени ti;
δr(ti) - угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени ti;
δrкa(ti) - угловое расстояние между положениями космического аппарата в моменты времени ti и ti+1;
β(ti) - угол между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта в момент времени ti;
α(ti) - угол между плоскостью, образованной положениями космического аппарата и космического объекта в момент времени ti+1, и плоскостью, образованной положениями космического аппарата в момент времени ti+1 и космического объекта в момент времени ti;
β(ri+1)- угол между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта в момент времени ti+1;
δ(ti) - угол между плоскостью движения космического аппарата и плоскостью, образованной положениями космического аппарата в момент времени ti+1 и космического объекта в момент времени ti,
вычисляют параметры орбиты космического объекта: фокальный параметр - P(ti), истинную аномалию - ϑ(ti), эксцентриситет - e(ti) и наклонение орбиты - iко в момент времени ti в соответствии с математическими зависимостями:
 ,
,
 ,
,
 ,
,
 ,
,
где:
 ;
;
φко(ti)=arcsin[sinj(ti)sin(δz(ti)+δr(ti))];
 ;
;
j(ti)=arccos[cosε(ti)cosφка(ti)];
 ;
;
rко(ti+1) - радиус-вектор космического объекта, соединяющий центр Земли с положением космического объекта в момент времени ti+1;
rко(ti) - радиус-вектор космического объекта, соединяющий центр Земли с положением космического объекта в момент времени ti;
µ - произведение гравитационной постоянной на массу Земли;
Δt=ti+1-ti;
Δν(ti, ti+1) - угловое расстояние между положениями космического объекта для двух следующих друг за другом моментов времени измерений ti и ti+1;
s(ti) - дуга, лежащая в плоскости движения космического объекта и соединяющая его положение в момент времени ti и в ближайший момент времени прохождения экватора;
φко(ti) - широта подспутниковой точки космического объекта в момент времени ti;
φко(ti+1) - широта подспутниковой точки космического объекта в момент времени ti+1;
j(ti) - наклонение «условной» орбиты, проходящей через широты подспутниковых точек космического аппарата и космического объекта в момент времени ti;
δz(ti) - дуга, лежащая в плоскости «условной» орбиты с наклонением j(ti) и соединяющая подспутниковую точку космического аппарата в момент времени ti и плоскость экватора;
δr(ti) - угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени ti;
φка(ti) - широта подспутниковой точки космического аппарата в момент времени ti;
ε(ti) - курсовой угол для плоскости условной орбиты, проходящей через широты подспутниковых точек космического аппарата, космического объекта и центр Земли в момент времени ti;
iкa - наклонение орбиты космического аппарата;
β(ti) - угол между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта в момент времени ti.
Техническим результатом изобретения является повышение оперативности определения орбит движения КО за счет осуществления на борту КА обработки обнаруженных с помощью бинокулярной системы оптических датчиков и экспонированных ПЗС-матрицами в моменты времени ti и ti+1 изображений КО, получения при этом соответствующих моментам времени ti и ti+1 необходимых измеренных углов и осуществления безытерационного вычисления параметров орбиты КО с использованием предложенных математических зависимостей.
Указанный технический результат достигается тем, что в заявленном способе определения параметров орбиты космического объекта, заключающимся в определении на борту космического аппарата в моменты времени ti, где, где i=1, 2, 3, …, значений радиус-вектора, соединяющего центр Земли с местоположением космического аппарата - rка(ti), значений широты подспутниковых точек космического аппарата -φка(ti), значений расстояния между космическим аппаратом и космическим объектом - Δr(ti), значений угла между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта - β(ti), при этом определяют в моменты времени ti бортовыми оптическими датчиками угол между направлением от космического аппарата до космического объекта и местным горизонтом, лежащим в плоскости, образованной положениями космического аппарата, космического объекта и центром Земли - θ(ti), вычисляют значения радиус-вектора - rко(ti) космического объекта, соединяющего центр Земли с положением космического объекта в момент времени ti и угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени ti - δr(ti) в соответствии с математическими зависимостями:
 ,
,
 ,
,
где:
rка(ti) - радиус-вектор космического аппарата, соединяющий центр Земли с положением космического аппарата в момент времени ti;
Δr(ti) - расстояние между центрами масс космического аппарата и космического объекта в момент времени ti;
θ(ti) - угол между направлением от космического аппарата до космического объекта и местным горизонтом, лежащим в плоскости, образованной положениями космического аппарата, космического объекта и центром Земли в момент времени ti;
δr(ti) - угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени ti,
вычисляют угловое расстояние между положениями космического объекта - Δν(ti, ti+1) для двух следующих друг за другом моментов времени измерений ti и ti+1 по формуле:
Δν(ti,ti+1)=arccos[cosσ(ti)cosδr(ti+1)-sinσ(ti)sinδr(ti+1)cosα(ti)],
где:
σ(ti)=arccos[cosδr(ti)cosδrка(ti)-sinδr(ti)sinδrка(ti)cosβ(ti)];
α(ti)=π-β(ti+1)-δ(ti);
;
σ(ti) - угловое расстояние между положением космического аппарата в момент времени ti+1 и космического объекта в момент времени ti;
δr(ti) - угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени ti;
δrкa(ti) - угловое расстояние между положениями космического аппарата в моменты времени ti и ti+1;
β(ti) - угол между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта в момент времени ti;
α(ti) - угол между плоскостью, образованной положениями космического аппарата и космического объекта в момент времени ti+1, и плоскостью, образованной положениями космического аппарата в момент времени ti+1 и космического объекта в момент времени ti;
β(ti+1) - угол между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта в момент времени ti+1;
δ(ti) - угол между плоскостью движения космического аппарата и плоскостью, образованной положениями космического аппарата в момент времени ti+1 и космического объекта в момент времени ti,
вычисляют параметры орбиты космического объекта: фокальный параметр - P(ti), истинную аномалию - ϑ(ti), эксцентриситет - e(ti) и наклонение орбиты - iко в момент времени ti в соответствии с математическими зависимостями:
,
 ,
,
,
,
где:
;
φко(ti)=arcsin[sinj(ti)sin(δz(ti)+δr(ti))];
;
j(ti)=arccos[cosε(ti)cosφка(ti)];
;
rко(ti+1) - радиус-вектор космического объекта, соединяющий центр Земли с положением космического объекта в момент времени ti+1;
rко(ti) - радиус-вектор космического объекта, соединяющий центр Земли с положением космического объекта в момент времени ti;
µ - произведение гравитационной постоянной на массу Земли;
Δt=ti+1-ti;
Δν(ti, ti+1) - угловое расстояние между положениями космического объекта для двух следующих друг за другом моментов времени измерений ti и ti+1;
s(ti) - дуга, лежащая в плоскости движения космического объекта и соединяющая его положение в момент времени ti и в ближайший момент времени прохождения экватора;
φко(ti) - широта подспутниковой точки космического объекта в момент времени ti;
φко(ti+1) - широта подспутниковой точки космического объекта в момент времени ti+1;
j(ti) - наклонение «условной» орбиты, проходящей через широты подспутниковых точек космического аппарата и космического объекта в момент времени ti;
δz(ti) - дуга, лежащая в плоскости «условной» орбиты с наклонением j(ti) и соединяющая подспутниковую точку космического аппарата в момент времени ti и плоскость экватора;
δr(ti) - угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени ti;
φка(ti) - широта подспутниковой точки космического аппарата в момент времени ti;
ε(ti) - курсовой угол для плоскости условной орбиты, проходящей через широты подспутниковых точек космического аппарата, космического объекта и центр Земли в момент времени ti;
iка - наклонение орбиты космического аппарата;
β(ti) - угол между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта в момент времени ti.
Заявленный способ определения параметров орбиты космического объекта поясняется следующими фигурами:
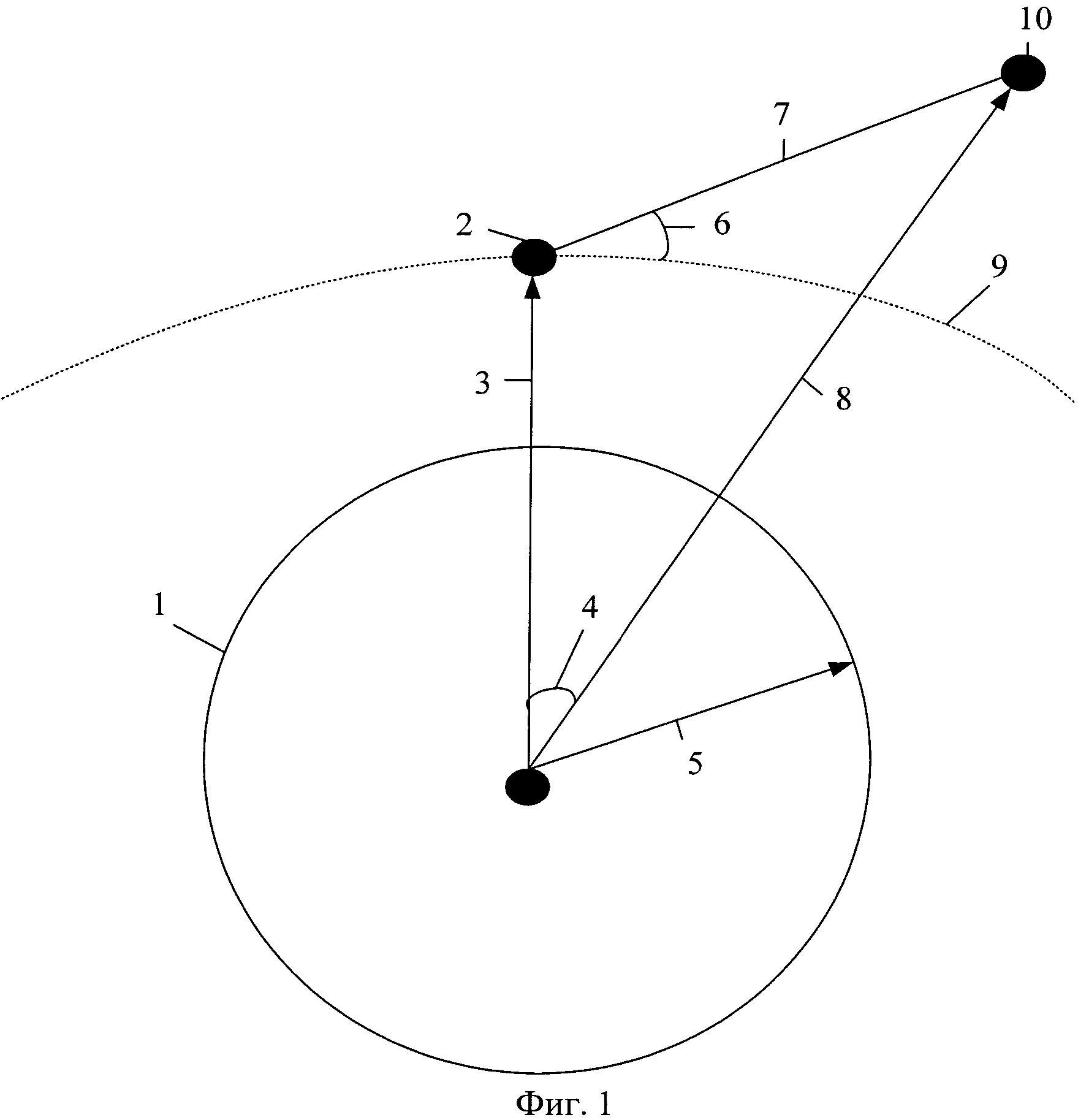
- на фигуре 1 приведено относительное расположение КА и КО,
- на фигуре 2 представлено относительное расположение плоскостей движения КА и КО,
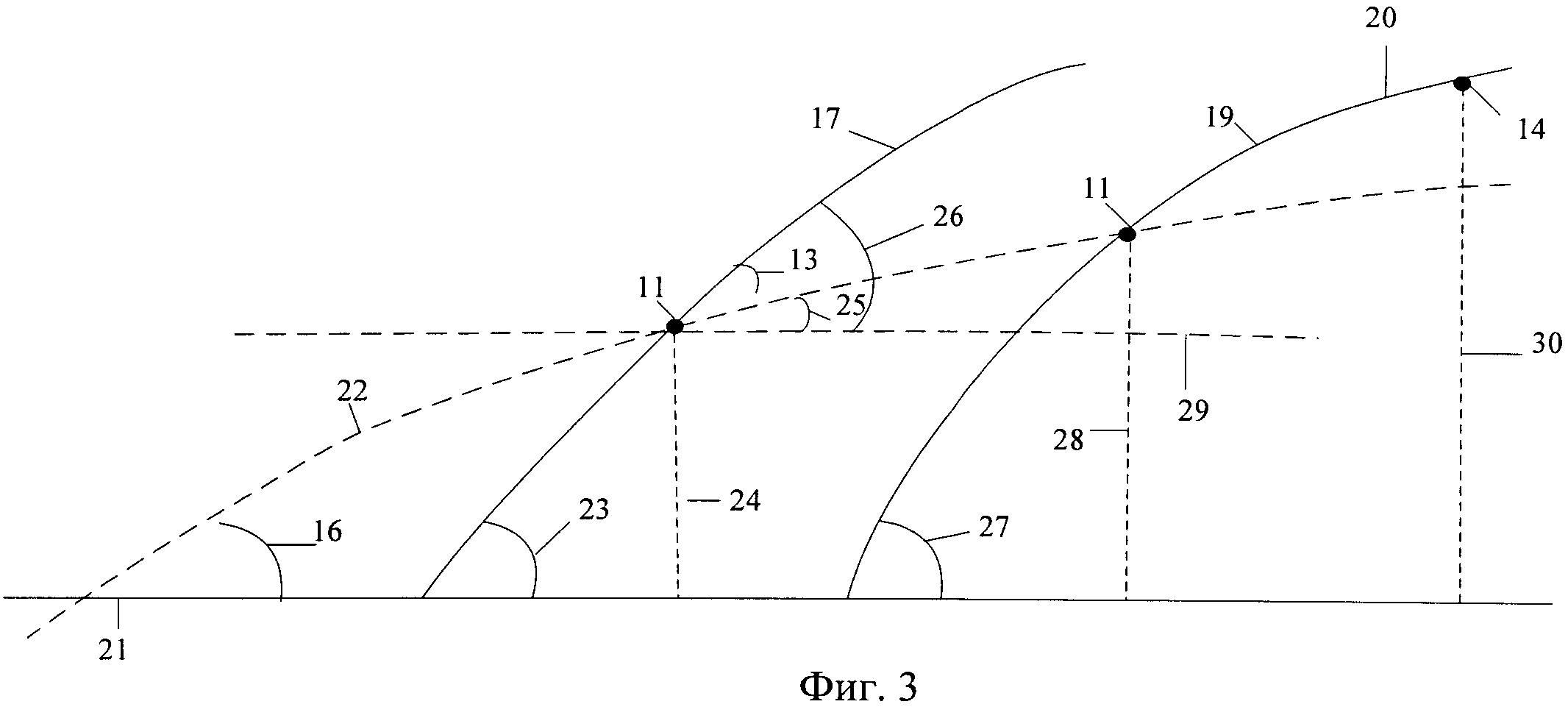
- на фигуре 3 представлены трассы движения КА и КО.
На фиг.1-фиг.3 и в тексте приняты следующие обозначения:
1 - поверхность Земли,
2 - КА,
3 - радиус-вектор космического аппарата, соединяющий начало координат (центр Земли) с положением КА на его траектории - rка,
4 - угловое расстояние между текущими положениями космического аппарата и космического объекта - δr,
5 - радиус Земли - R,
6 - угол между направлением от КА до КО и местным горизонтом, лежащим в плоскости, образованной положениями КА, КО и центром Земли - θ,
7 - расстояние между центрами масс космического аппарата и космического объекта - Δr,
8 - радиус - вектор космического объекта, соединяющий начало координат (центр Земли) с положением КО - rко,
9 - местный горизонт,
10 - КО,
11 - момент времени измерений ti, предшествующий моменту времени измерений ti+1;
12 - угловое расстояние между положениями космического аппарата в моменты времени ti и ti+1 - δrка,
13 - угол между плоскостью движения КА и направлением от КА до KO - β,
14 - момент времени измерений ti+1, следующий за моментом времени измерений ti;
15 - угол между плоскостью движения космического аппарата и плоскостью образованной положениями космического аппарата в момент времени ti+1 и космического объекта в момент времени ti - δ,
16 - угол между плоскостью большого круга, образованной положениями космического аппарата и космического объекта в момент времени ti+1, и плоскостью большого круга, образованной положениями космического аппарата в момент времени ti+1 и космического объекта в момент времени ti - α,
17 - траектория полета КА,
18 - угловое расстояние между положением космического аппарата и космического объекта - σ,
19 - угловое расстояние между положениями космического объекта в моменты времени ti и ti+1 - Δν,
20 - траектория полета КО,
21 - плоскость экватора, проходящая через центр Земли перпендикулярно оси ее вращения;
22 - угловое расстояние между положением космического аппарата в момент времени ti и плоскостью экватора, лежащее в плоскости условной орбиты образованной положениями КА и КО в момент времени ti и центром Земли - δZ,
23 - наклонение орбиты КА - iка,
24 - широта подспутниковой точки КА в момент времени ti - φка,
25 - курсовой угол для плоскости условной орбиты, проходящей через широты подспутниковых точек космического аппарата, космического объекта и центр Земли в момент времени ti - ε(ti),
26 - курсовой угол между проекцией вектора скорости КА на местный горизонт и местной параллелью в момент времени ti - ε(ti),
27 - наклонение орбиты космического объекта - iко,
28 - широта подспутниковой точки КО в момент времени ti - φко(ti),
29 - местная параллель на широте подспутниковой точки КА в момент времени ti,
30 - широта подспутниковой точки КО в момент времени ti+1 - φко(ti+1).
Покажем возможность осуществления изобретения, т.е. возможность его промышленного применения.
При осуществления изобретения с наземных пунктов управления ежесуточно во время сеанса связи на борт космического аппарата производится запись командно-программной информации, содержащей данные о его текущих орбитальных параметрах на момент сеанса связи («Бортовые системы управления космическими аппаратами»: Учебное пособие / Бровкин А.Г., Бурдыгов Б.Г., Гордийко С.В. и др., под редакцией Сырова А.С. М.: Изд-во МАИ-ПРИНТ, 2010, с.45-47, 56-61, 80-98)- (Д6). Далее происходит регистрация космических объектов бортовыми оптическими датчиками, представляющими собой бинокулярную систему разнесенных друг относительно друга оптических датчиков и имеющих параллельные оптические оси (Д3, Д4). На основе измеренного параллактического смещения треков прохождения космических объектов, зафиксированных на ПЗС-матрицах в моменты времени ti и ti+1, производится определение по методике (Д2) расстояния между центрами масс космического аппарата и космического объекта (Δr), а также угла β между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта (Д6). Затем бортовыми оптическими датчиками и исполнительными органами системы стабилизации и ориентации космического аппарата, описанными в (Д6, с.80-98) определяют угол θ (фиг.1, позиция 6) между направлением от космического аппарата до космического объекта и местным горизонтом, лежащим в плоскости, образованной положениями КА, КО и центром Земли. Далее по вышеприведенным формулам определяют параметры орбиты космического объекта.
Процедуры и технология ежесуточной записи командно-программной информации, содержащей данные о текущих орбитальных параметрах КА на момент сеанса связи, показаны в (Д6, с.45-47).
Регистрация космических объектов, а также состав и технические возможности бортовых оптических датчиков приведены в (Д6, с.56-61).
Реализация бинокулярной системы разнесенных друг относительно друга оптических датчиков и имеющих параллельные оптические оси, описана в (Д3, Д4).
Способ измерений параллактического смещения треков прохождения космических объектов, зафиксированных на ПЗС-матрицах, а также измерение расстояний между центрами масс космического аппарата и космического объекта Δr и углов β между плоскостью движения космического аппарата и направлениями от космического аппарата до космического объекта производится по методикам, приведенных в (Д2 и Д3).
Взаимодействие бортовых оптических датчиков и исполнительных органов системы стабилизации и ориентации космического аппарата описано в (Д6, с.80-98) дает возможность определить угол - θ между направлением от космического аппарата до космического объекта и местным горизонтом, лежащим в плоскости, образованной положениями КА, КО и центром Земли.
Возможность осуществления итерационного вычислительного бортового алгоритма, уточняющего орбитальные параметры космического объекта и прогнозирующего минимальное расстояние между космическим аппаратом и космическим объектом, показана в источниках информации: «Наведение в космосе» / Ричард Беттин. - М.: Машиностроение, 1966 - (Д7), «Введение в теорию полета искусственных спутников земли» / Эльясберг П.Е. - М.: Наука, 1965 - (Д8).
Способ определения параметров орбиты космического объекта, заключающийся в определении на борту космического аппарата в моменты времени t, где i=1, 2, 3, …, значений радиус-вектора r(t), соединяющего центр Земли с местоположением космического аппарата, значений широты φ(t) подспутниковых точек космического аппарата, значений расстояния Δr(t) между космическим аппаратом и космическим объектом, значений угла β(t) между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта, отличающийся тем, что определяют в моменты времени tбортовыми оптическими датчиками угол θ(t) между направлением от космического аппарата до космического объекта и местным горизонтом, лежащий в плоскости, образованной положениями космического аппарата, космического объекта и центром Земли, вычисляют значения радиус-вектора r(t) космического объекта, соединяющего центр Земли с положением космического объекта в момент времени t, и угловое расстояние δr(t) между текущими положениями космического аппарата и космического объекта в момент времени t в соответствии с математическими зависимостями: , ,где:r(t) - радиус-вектор космического аппарата, соединяющий центр Земли с положением космического аппарата в момент времени t;Δr(t) - расстояние между центрами масс космического аппарата и космического объекта в момент времени t;θ(t) - угол между направлением от космического аппарата до космического объекта и местным горизонтом, лежащий в плоскости, образованной положениями космического аппарата, космического объекта и центром Земли в момент времени t;δr(t) - угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени t,вычисляют угловое расстояние Δ(t, t) между положениями космического объекта для двух следующих друг за другом моментов времени измерений t и t по формуле:Δ(t, t)=arccos[cosσ(t)cosδr(t)-sinσ(t)sinδr(t)cosα(t)],где:σ(t)=arccos[cosδr(t)cosδr(t)-sinδr(t)sinδr(t)cosβ(t)];α(t)=π-β(t)-δ(t); ;σ(t) - угловое расстояние между положением космического аппарата в момент времени t и космического объекта в момент времени t;δr(t) - угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени t;δr(t) - угловое расстояние между положениями космического аппарата в моменты времени t и t;β(t) - угол между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта в момент времени t;α(t) - угол между плоскостью, образованной положениями космического аппарата и космического объекта в момент времени t, и плоскостью, образованной положениями космического аппарата в момент времени t и космического объекта в момент времени t;β(t) - угол между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта в момент времени t;δ(t) - угол между плоскостью движения космического аппарата и плоскостью, образованной положениями космического аппарата в момент времени t и космического объекта в момент времени t,вычисляют параметры орбиты космического объекта: фокальный параметр P(t), истинную аномалию ϑ(t), эксцентриситет e(t) и наклонение орбиты i в момент времени t в соответствии с математическими зависимостями: , , , ,где: ;φ(t)=arcsin[sinj(t)sin(δz(t)+δr(t))]; ;j(t)=arccos[cosε(t)cosφ(t)]; ;r() - радиус-вектор космического объекта, соединяющий центр Земли с положением космического объекта в момент времени t;r(t) - радиус-вектор космического объекта, соединяющий центр Земли с положением космического объекта в момент времени t;µ - произведение гравитационной постоянной на массу Земли;Δt=t-t;Δ(t, t) - угловое расстояние между положениями космического объекта для двух следующих друг за другом моментов времени измерений t и t;s(t) - дуга, лежащая в плоскости движения космического объекта и соединяющая его положение в момент времени t и в ближайший момент времени прохождения экватора;φ(t) - широта подспутниковой точки космического объекта в момент времени t;φ(t) - широта подспутниковой точки космического объекта в момент времени t;j(t) - наклонение «условной» орбиты, проходящей через широты подспутниковых точек космического аппарата и космического объекта в момент времени t;δz(t) - дуга, лежащая в плоскости «условной» орбиты с наклонением j(t) и соединяющая подспутниковую точку космического аппарата в момент времени t и плоскость экватора;δr(t) - угловое расстояние между текущими положениями космического аппарата и космического объекта в момент времени t;φ(t) - широта подспутниковой точки космического аппарата в момент времени t;ε(t) - курсовой угол для плоскости условной орбиты, проходящей через широты подспутниковых точек космического аппарата, космического объекта и центр Земли в момент времени t;i - наклонение орбиты космического аппарата;β(t) - угол между плоскостью движения космического аппарата и направлением от космического аппарата до космического объекта в момент времени t.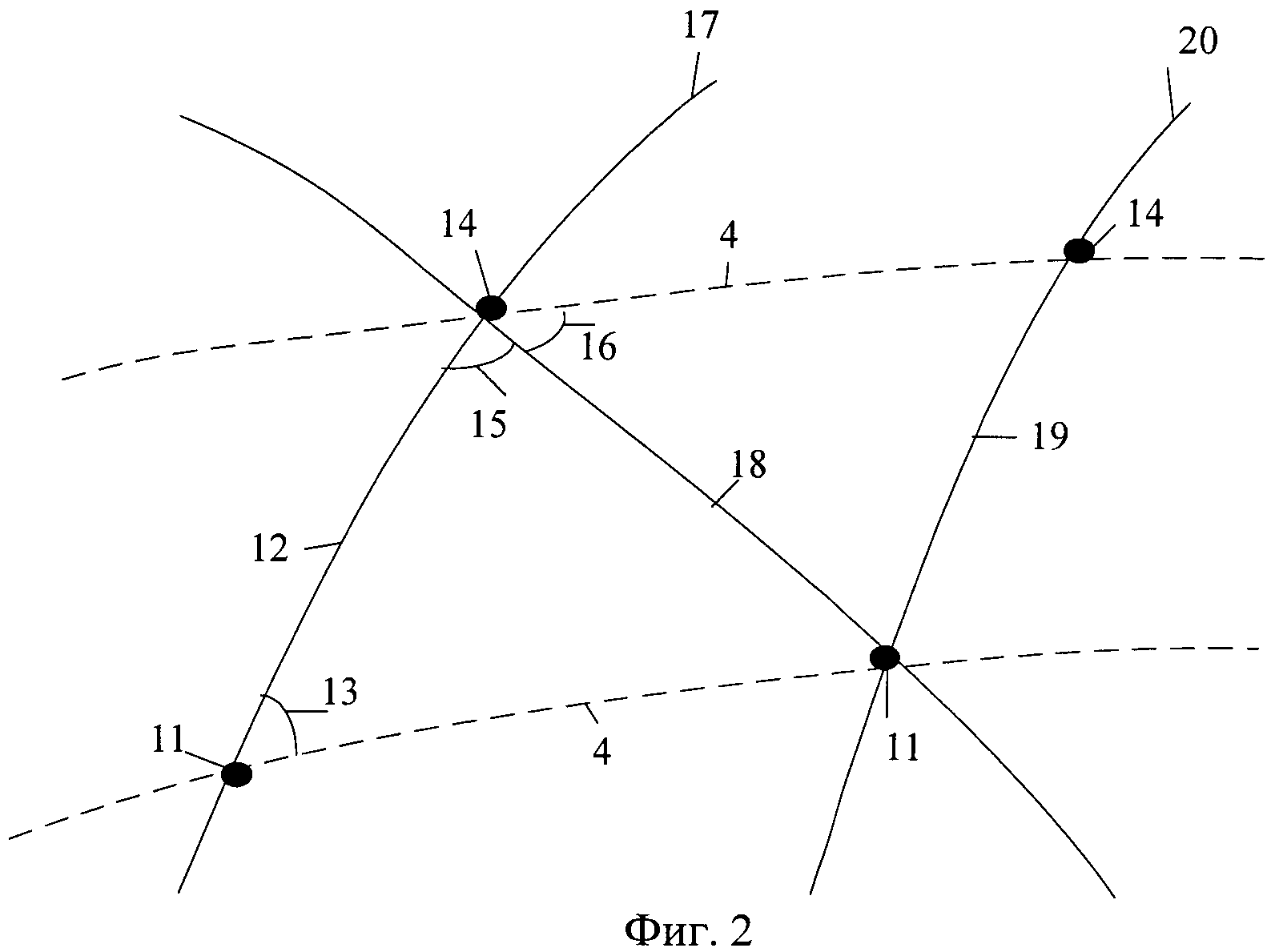

Способ управления космическим аппаратом при его выведении на орбиту искусственного спутника планеты
Способ измерения угла поворота вала привода и устройство для его реализации
Способ соединения космических объектов в космическом пространстве
Способ определения координат места пробоя корпуса гермоотсека космического объекта частицей природного или техногенного происхождения и устройство для его реализации
Универсальная рабочая камера эйфеля аэрогазодинамической установки
Способ управления движением космического аппарата на активном участке его выведения на орбиту искусственного спутника планеты
Способ измерения линейных ускорений, угловых скоростей и ускорений на борту космического аппарата в условиях, близких к невесомости и устройство для его осуществления
Способ управления движением космического аппарата при посадке в заданную область поверхности планеты
Теплозащитное покрытие корпуса летательного аппарата
Тензометрические весы
Способ управления космическим аппаратом при его выведении на орбиту искусственного спутника планеты
Способ измерения угла поворота вала привода и устройство для его реализации
Способ соединения космических объектов в космическом пространстве
Способ определения координат места пробоя корпуса гермоотсека космического объекта частицей природного или техногенного происхождения и устройство для его реализации
Универсальная рабочая камера эйфеля аэрогазодинамической установки
Способ управления движением космического аппарата на активном участке его выведения на орбиту искусственного спутника планеты
Способ измерения линейных ускорений, угловых скоростей и ускорений на борту космического аппарата в условиях, близких к невесомости и устройство для его осуществления
Способ управления движением космического аппарата при посадке в заданную область поверхности планеты
Теплозащитное покрытие корпуса летательного аппарата
Тензометрические весы

