Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ УГЛА ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к радионавигации и может использоваться в пилотажно-навигационных системах ориентации летательного аппарата (ЛА), например при заходе на посадку по приборам.
Известные способы и устройства измерения угла тангажа ЛА основаны на использовании инерциальных систем навигации, в частности гироскопических систем ориентации [1-3]. Таким способам измерения и устройствам, их реализующим, присущ ряд недостатков. Во-первых, с течением времени происходит постоянное накопление ошибки измерений и за один час полета она составляет величину единицы градусов [1, 2]. Во-вторых, если ЛА развивает значительные перегрузки, то происходит увеличение собственной скорости прецессии гироскопа, что в ряде случаев приводит к полной потере его работоспособности [1].
Поскольку известные способы измерения угла тангажа ЛА и устройства, их реализующие, основаны на другом физическом принципе, по сравнению с заявляемыми, то они не могут рассматриваться в качестве аналогов, так как не имеют общих признаков.
Сущность заявляемого способа измерения угла тангажа ξ ЛА заключается в следующем.
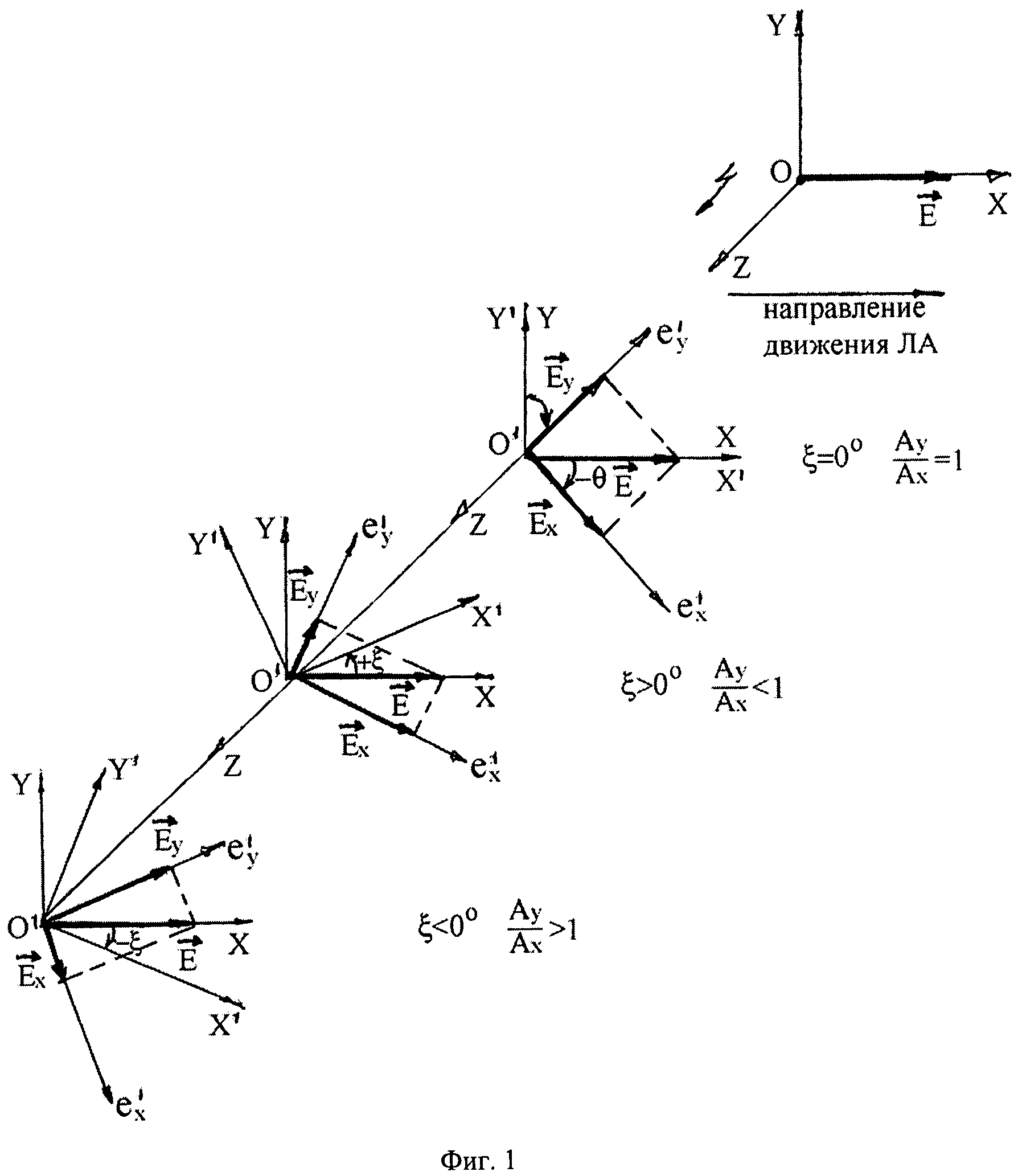
Из точки (О) с известными координатами в направлении ЛА излучают горизонтально линейно поляризованные электромагнитные волны (см. фиг.1). Выберем систему координат таким образом, что направление излучения электромагнитных волн совпадает с осью OZ. Ось OY перпендикулярна горизонтальной плоскости OZX, а ось ОХ находится в этой плоскости. Совместно они образуют исходную неподвижную декартовую прямоугольную систему координат YOX. Вектор напряженности электрического поля  излучаемых электромагнитных волн совпадает с горизонтальной плоскостью OZX и с положительным направлением оси ОХ, лежащей в этой плоскости.
излучаемых электромагнитных волн совпадает с горизонтальной плоскостью OZX и с положительным направлением оси ОХ, лежащей в этой плоскости.
На борту ЛА, находящегося в точке О' (см. фиг.1), связанная с корпусом подвижная декартовая система прямоугольных координат Y'O'X' организована таким образом, что в исходном состоянии, когда угол тангажа ξ ЛА равен нулю, вертикальная O'Y' и продольная O'X' оси ЛА совпадают соответственно с осями OY и ОХ неподвижной декартовой прямоугольной системы координат YOX источника излучения электромагнитных волн. Таким образом, когда угол тангажа ξ ЛА равен нулю, вертикальная O'Y' ось ЛА совпадает с перпендикуляром к горизонтальной плоскости (или плоскости горизонта), т.е. с осью OY, а продольная ось O'X' ЛА находится в этой плоскости и совпадает с положительным направлением оси ОХ и направлением движения ЛА.
На борту ЛА приемная антенна, ось симметрии диаграммы направленности которой перпендикулярна направлению движения ЛА, осуществляет боковой прием горизонтально линейно поляризованных электромагнитных волн в собственном линейном ортогональном поляризационном базисе, единичные вектора (орты)  и
и  которого составляют угол θ=-45° с продольной O'X' и вертикальной O'Y' осями ЛА соответственно и в случае, когда угол тангажа ξ ЛА равен нулю, составляют также угол θ=-45° с горизонтальной ОХ и вертикальной OY осями неподвижной декартовой прямоугольной системы координат YOX соответственно. При этом угол θ отсчитывается по ходу движения часовой стрелки относительно оси OZ.
которого составляют угол θ=-45° с продольной O'X' и вертикальной O'Y' осями ЛА соответственно и в случае, когда угол тангажа ξ ЛА равен нулю, составляют также угол θ=-45° с горизонтальной ОХ и вертикальной OY осями неподвижной декартовой прямоугольной системы координат YOX соответственно. При этом угол θ отсчитывается по ходу движения часовой стрелки относительно оси OZ.
Выбранная ориентация приемного линейного ортогонального поляризационного базиса  относительно продольной O'X' и вертикальной O'Y' осей ЛА позволяет на борту ЛА разделить принятые горизонтально линейно поляризованные электромагнитные волны, вектор напряженности электрического поля
относительно продольной O'X' и вертикальной O'Y' осей ЛА позволяет на борту ЛА разделить принятые горизонтально линейно поляризованные электромагнитные волны, вектор напряженности электрического поля  которых находится в горизонтальной плоскости, на две синфазные ортогонально линейно поляризованные составляющие вектора
которых находится в горизонтальной плоскости, на две синфазные ортогонально линейно поляризованные составляющие вектора  и
и  , представить вектор
, представить вектор  как линейную суперпозицию в виде:
как линейную суперпозицию в виде:

где векторы  и
и  являются линейными ортогональными поляризациями и имеют значение базисных векторов (ортов) и называются базисными линейными состояниями поляризации. Эти векторы характеризуются единичной амплитудой и нулевой начальной фазой, и они ориентированы под углом θ=-45° относительно продольной O'X' и вертикальной O'Y' осей ЛА соответственно. Очевидно, что при выбранной ориентации приемного поляризационного базиса амплитуды Ax и Ay составляющих
и
будут определяться углом ориентации продольной оси O'X' ЛА относительно оси ОХ, лежащей в горизонтальной плоскости, или, иначе говоря, углом тангажа ξ ЛА. Так, например, если продольная ось O'X' ЛА находится в горизонтальной плоскости (см. фиг.1) и совпадает с осью ОХ неподвижной декартовой прямоугольной системы координат YOX, т.е. угол тангажа ξ=0°, то амплитуды Ax и Ay ортогонально линейно поляризованных синфазных составляющих
и
равны между собой и Ax=Ay. В общем случае, когда продольная ось O'X' ЛА находится ниже или выше горизонтальной плоскости, т.е. угол тангажа ξ≠0°, равенство амплитуд Ax и Ay не сохраняется и Ax≠Ay. Таким образом, амплитуды Ax и Ay синфазных линейно ортогонально поляризованных составляющих
и
вектора напряженности электрического поля
на борту ЛА определяются углом тангажа ξ ЛА.
являются линейными ортогональными поляризациями и имеют значение базисных векторов (ортов) и называются базисными линейными состояниями поляризации. Эти векторы характеризуются единичной амплитудой и нулевой начальной фазой, и они ориентированы под углом θ=-45° относительно продольной O'X' и вертикальной O'Y' осей ЛА соответственно. Очевидно, что при выбранной ориентации приемного поляризационного базиса амплитуды Ax и Ay составляющих
и
будут определяться углом ориентации продольной оси O'X' ЛА относительно оси ОХ, лежащей в горизонтальной плоскости, или, иначе говоря, углом тангажа ξ ЛА. Так, например, если продольная ось O'X' ЛА находится в горизонтальной плоскости (см. фиг.1) и совпадает с осью ОХ неподвижной декартовой прямоугольной системы координат YOX, т.е. угол тангажа ξ=0°, то амплитуды Ax и Ay ортогонально линейно поляризованных синфазных составляющих
и
равны между собой и Ax=Ay. В общем случае, когда продольная ось O'X' ЛА находится ниже или выше горизонтальной плоскости, т.е. угол тангажа ξ≠0°, равенство амплитуд Ax и Ay не сохраняется и Ax≠Ay. Таким образом, амплитуды Ax и Ay синфазных линейно ортогонально поляризованных составляющих
и
вектора напряженности электрического поля
на борту ЛА определяются углом тангажа ξ ЛА.
Установим связь между амплитудами Ax и Ay, а также фазами φx и φy синфазно линейно ортогонально поляризованных составляющих
и
углом тангажа ξ ЛА.
Для установления этой связи воспользуемся известным [4, 5] формализмом векторов и матриц Джонса. Тогда составляющие сигналов
и
в собственном приемном линейном поляризационном базисе  , ориентированном под углом θ=-45° относительно вертикальной O'Y' и продольной O'X' осей ЛА на входе приемника, определяются, опуская временную зависимость сигналов, с помощью преобразований вида:
, ориентированном под углом θ=-45° относительно вертикальной O'Y' и продольной O'X' осей ЛА на входе приемника, определяются, опуская временную зависимость сигналов, с помощью преобразований вида:


где  - вектор Джонса излучаемых горизонтально линейно поляризованных электромагнитных волн, записанный в исходном декартовом линейном поляризационном базисе
, единичные вектора (орты) которых совпадают с горизонтальной ОХ и вертикальной OY осями неподвижной декартовой прямоугольной системы координат YOX соответственно,
- вектор Джонса излучаемых горизонтально линейно поляризованных электромагнитных волн, записанный в исходном декартовом линейном поляризационном базисе
, единичные вектора (орты) которых совпадают с горизонтальной ОХ и вертикальной OY осями неподвижной декартовой прямоугольной системы координат YOX соответственно,
 - оператор поворота на угол тангажа
- оператор поворота на угол тангажа  ξ,
ξ,
-ξ - тангаж отрицателен, когда продольная ось O'X' ЛА находится ниже горизонтальной плоскости,
+ξ - тангаж положителен, когда продольная ось O'X' ЛА находится выше горизонтальной плоскости,
 - оператор поворота по часовой стрелке на угол -θ (θ - ориентации собственного приемного линейного ортогонального поляризационного базиса
относительно продольной O'X' и вертикальной O'Y' осей ЛА подвижной декартовой прямоугольной системы координат ЛА Y'O'X' соответственно),
- оператор поворота по часовой стрелке на угол -θ (θ - ориентации собственного приемного линейного ортогонального поляризационного базиса
относительно продольной O'X' и вертикальной O'Y' осей ЛА подвижной декартовой прямоугольной системы координат ЛА Y'O'X' соответственно),
 - оператор Джонса первого плеча линейного поляризационного разделителя, собственный орт которого совпадает с вектором
,
- оператор Джонса первого плеча линейного поляризационного разделителя, собственный орт которого совпадает с вектором
,
 - оператор Джонса второго плеча линейного поляризационного разделителя, собственный орт которого совпадает с вектором
.
- оператор Джонса второго плеча линейного поляризационного разделителя, собственный орт которого совпадает с вектором
.
Проделав в (2) и (3) необходимые матричные вычисления, получим аналитические выражения для ортогонально линейно поляризованных составляющих
и
на входе приемника вида:

соответственно их фазы:
Найдем отношение амплитуд Ax и Ay ортогонально линейно поляризованных составляющих  и
и  на выходе приемника, имеющего, например, линейную амплитудную характеристику:
на выходе приемника, имеющего, например, линейную амплитудную характеристику:

Подставляя в (6) θ=45°, а также учитывая определение угла тангажа [6], получим выражение для измерения угла тангажа ξ ЛА в виде:
-γ - соответствует отрицательному углу тангажа, когда продольная ось ЛА находится ниже горизонтальной плоскости,
+γ - соответствует положительному углу тангажа, когда продольная ось ЛА находится выше горизонтальной плоскости,
Ax - амплитуда линейно поляризованной составляющей вектора напряженности электрического поля  ,
,
Ay - амплитуда линейно поляризованной составляющей вектора напряженности электрического поля  .
.
Из анализа (7) видим, что если отношение  , т.е. продольная ось O'X' ЛА находится в горизонтальной плоскости и совпадает с положительным направлением оси ОХ неподвижной декартовой прямоугольной системы координат YOX, то угол тангажа ξ=0°. Когда отношение амплитуд
, т.е. продольная ось O'X' ЛА находится в горизонтальной плоскости и совпадает с положительным направлением оси ОХ неподвижной декартовой прямоугольной системы координат YOX, то угол тангажа ξ=0°. Когда отношение амплитуд  , т.е. продольная ось O'X' ЛА находится выше горизонтальной плоскости, то угол тангажа ξ положителен и ξ>0°, а если
, т.е. продольная ось O'X' ЛА находится выше горизонтальной плоскости, то угол тангажа ξ положителен и ξ>0°, а если  , т.е. продольная ось O'X' ЛА находится ниже горизонтальной плоскости, то угол тангажа ξ отрицателен и ξ<0° (см. фиг.1).
, т.е. продольная ось O'X' ЛА находится ниже горизонтальной плоскости, то угол тангажа ξ отрицателен и ξ<0° (см. фиг.1).
В случае, если приемные каналы сигналов  и
и  имеют логарифмическую амплитудную характеристику и используется линейное детектирование сигналов
имеют логарифмическую амплитудную характеристику и используется линейное детектирование сигналов  и
и  , то отношение амплитуд
, то отношение амплитуд  двух сигналов
и
получается вычитанием значений логарифмов амплитуд этих сигналов, что, как известно [7], эквивалентно образованию логарифма отношения вида:
двух сигналов
и
получается вычитанием значений логарифмов амплитуд этих сигналов, что, как известно [7], эквивалентно образованию логарифма отношения вида:

Использование заявляемой совокупности признаков для измерения угла тангажа ЛА в известных решениях автором не обнаружено.
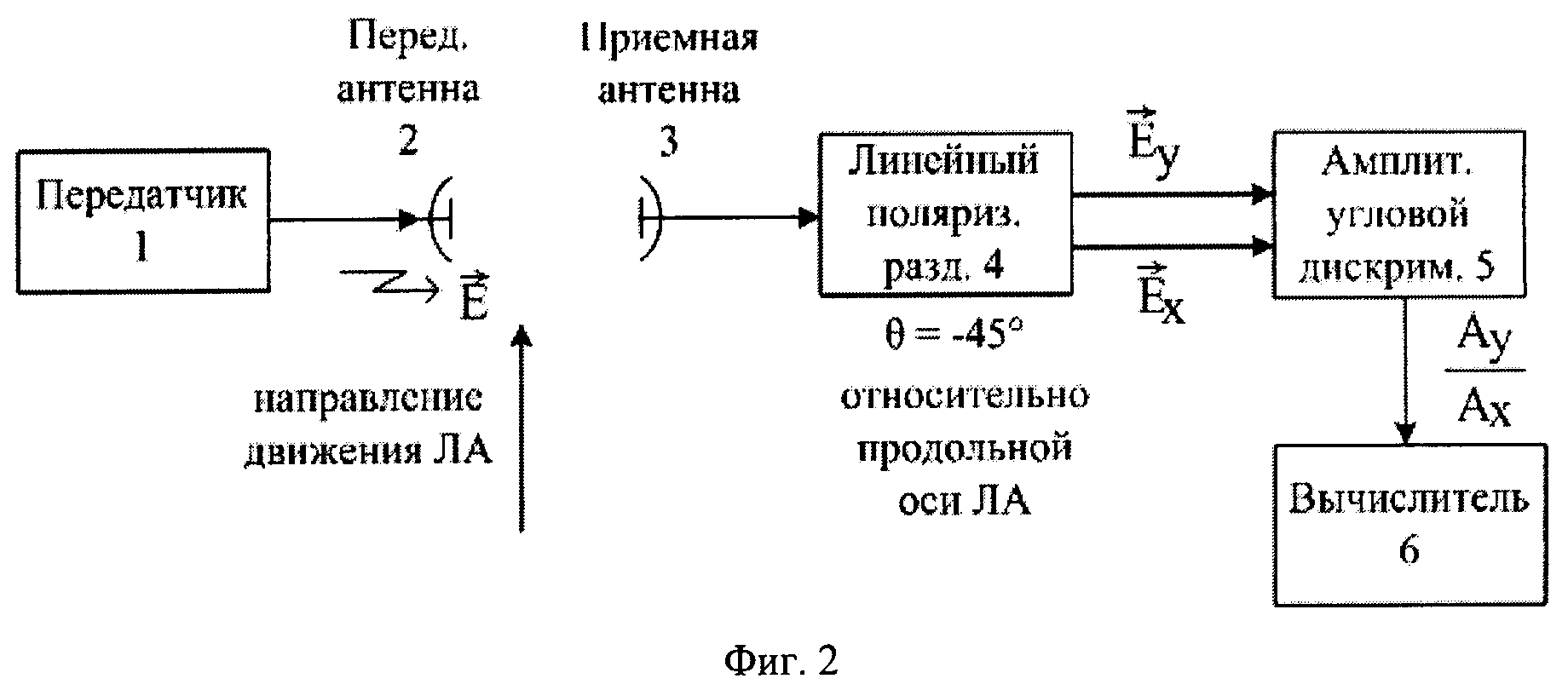
На фиг.2 представлена структурная электрическая схема устройства, реализующего предложенный способ измерения угла тангажа ЛА. Устройство содержит передатчик 1 и передающую антенну 2, расположенные в точке с известными координатами. На борту ЛА устройство содержит приемную антенну 3, линейный поляризационный разделитель 4, амплитудный угловой дискриминатор 5 и вычислитель 6.
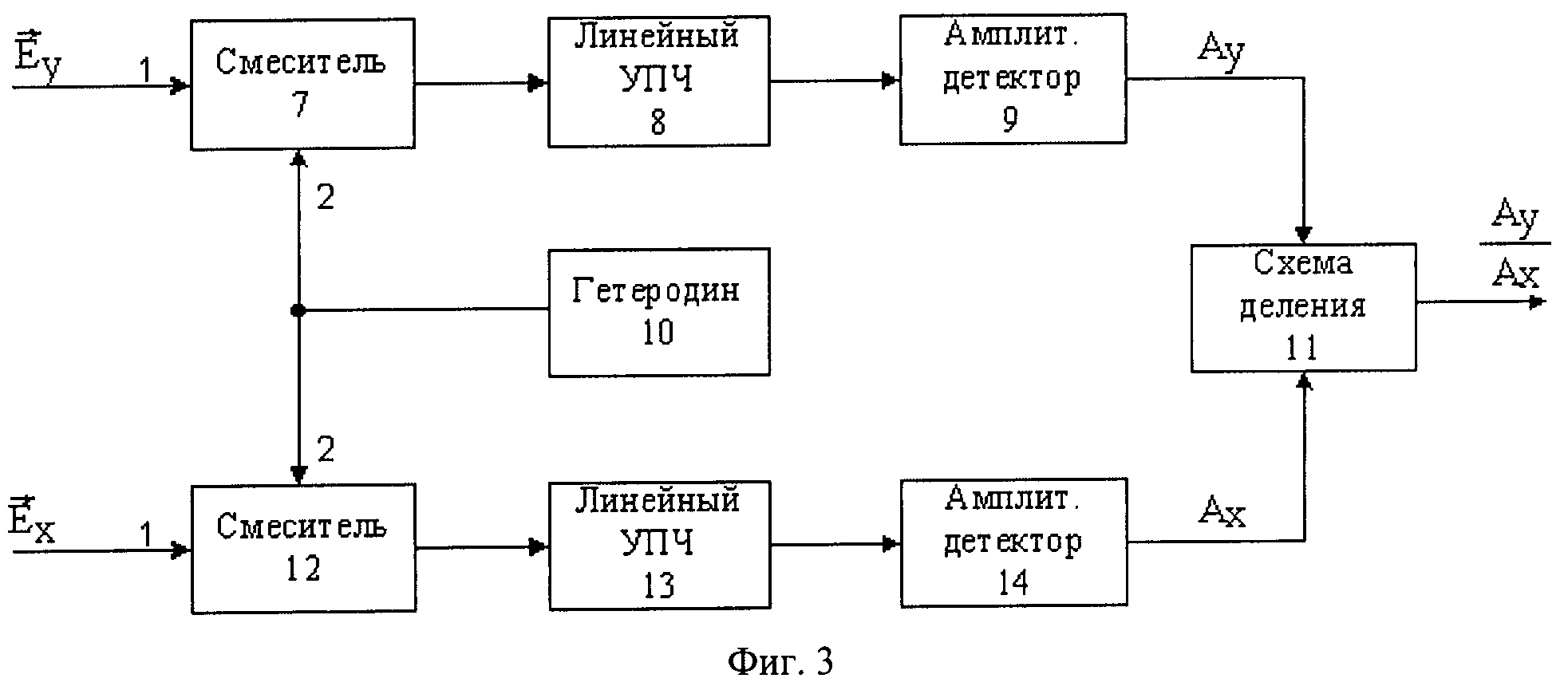
На фиг.3 представлена структурная электрическая схема амплитудного углового дискриминатора 5, приемные каналы которого используют усилители промежуточной частоты (УПЧ) с линейной амплитудной характеристикой, и включает в себя: первый смеситель 7, первый линейный УПЧ 8, первый амплитудный детектор 9, гетеродин 10, схему деления 11, второй смеситель 12, второй линейный УПЧ 13, второй амплитудный детектор 14.
Устройство работает следующим образом.
Передатчик 1 через передающую антенну 2, имеющую горизонтальную собственную поляризацию, излучает в направлении ЛА горизонтально линейно поляризованные электромагнитные волны, вектор напряженности электрического поля Е которых совпадает с горизонтальной плоскостью.
На борту ЛА приемная антенна 3, ось симметрии диаграммы направленности которой перпендикулярна направлению движения ЛА, осуществляет боковой прием электромагнитных волн. После чего выходной сигнал приемной антенны 3 поступает на линейный поляризационный разделитель 4, собственные орты которого составляют угол θ=-45° с вертикальной O'Y' и продольной O'X' осями ЛА соответственно. В линейном поляризационном разделителе 4 происходит разложение (разделение) принятых электромагнитных волн с вектором напряженности электрического поля  на две синфазные ортогонально линейно поляризованные составляющие
на две синфазные ортогонально линейно поляризованные составляющие  и
и  , ориентации векторов которых составляют угол θ=-45° с вертикальной O'Y' и продольной O'X' осями ЛА соответственно. После чего ортогонально линейно поляризованные сигналы
и
поступают на соответствующие им входы амплитудного углового дискриминатора 5, т.е. поступают на соответствующие им первые входы смесителей 7 и 12 (см. фиг.3), а на их вторые входы поступает сигнал с выхода гетеродина 10. Затем сигналы промежуточной частоты с выходов смесителей 7 и 12 поступают соответственно на входы усилителей промежуточной частоты 8 и 13, имеющих одинаковые линейные амплитудные характеристики. Выходные сигналы линейных УПЧ 8 и 13 поступают на соответствующие им входы амплитудных детекторов 9 и 14, выходные сигналы которых однозначно связаны с амплитудами Ay и Ax ортогонально линейно поляризованных составляющих
, ориентации векторов которых составляют угол θ=-45° с вертикальной O'Y' и продольной O'X' осями ЛА соответственно. После чего ортогонально линейно поляризованные сигналы
и
поступают на соответствующие им входы амплитудного углового дискриминатора 5, т.е. поступают на соответствующие им первые входы смесителей 7 и 12 (см. фиг.3), а на их вторые входы поступает сигнал с выхода гетеродина 10. Затем сигналы промежуточной частоты с выходов смесителей 7 и 12 поступают соответственно на входы усилителей промежуточной частоты 8 и 13, имеющих одинаковые линейные амплитудные характеристики. Выходные сигналы линейных УПЧ 8 и 13 поступают на соответствующие им входы амплитудных детекторов 9 и 14, выходные сигналы которых однозначно связаны с амплитудами Ay и Ax ортогонально линейно поляризованных составляющих  и
и  соответственно. Затем выходные сигналы амплитудных детекторов 9 и 14 поступают на соответствующие входы схемы деления 11, на выходе которой формируется отношение амплитуд Ay/Ax ортогонально линейно поляризованных составляющих
соответственно. Затем выходные сигналы амплитудных детекторов 9 и 14 поступают на соответствующие входы схемы деления 11, на выходе которой формируется отношение амплитуд Ay/Ax ортогонально линейно поляризованных составляющих  и
и  . После чего по измеренному на выходе амплитудного углового дискриминатора 5 отношению амплитуд Ay/Ax двух сигналов вычислитель 6 в соответствии с соотношением (7) определяет угол тангажа ξ ЛА.
. После чего по измеренному на выходе амплитудного углового дискриминатора 5 отношению амплитуд Ay/Ax двух сигналов вычислитель 6 в соответствии с соотношением (7) определяет угол тангажа ξ ЛА.
В случае, если УПЧ 8 и 13 имеют логарифмическую амплитудную характеристику, то схема деления 11 (фиг.3) заменяется схемой вычитания и в этом случае на выходе амплитудного углового дискриминатора 5 (фиг.2) формируется разность логарифмов амплитуд Ay и Ax двух ортогонально линейно поляризованных составляющих
и
, что эквивалентно образованию логарифма отношения амплитуд Ay/Ax этих сигналов (8).
В 3-см диапазоне длин волн заявляемое устройство измерения угла тангажа ЛА может быть выполнено следующим образом.
В качестве передатчика 1 может использоваться, например, стандартный генератор высокочастотных колебаний типа ГЧ-83.
В качестве передающей антенны 2 может быть использована слабонаправленная в горизонтальной плоскости рупорная антенна с горизонтальной собственной линейной поляризацией [8].
Приемная антенна 3 может быть выполнена в виде слабонаправленного круглого рупора [9].
Линейный поляризационный разделитель 4 может быть выполнен в виде волновода круглого сечения с переходом на два ортогонально расположенных волновода прямоугольного сечения [10].
Амплитудный угловой дискриминатор 5, выполненный в соответствие с функциональной схемой, приведенной на фиг.3, полностью совпадает с аналогичным амплитудным угловым дискриминатором известной амплитудно-амплитудной моноимпульсной системы [11].
Вычислитель 6 может быть выполнен на базе бортового компьютера ЛА.
По сравнению с широко используемыми на практике методами и техникой измерения угла тангажа ЛА, основанными на применении инерциальных средств навигации, заявляемые способ и устройство определения угла тангажа ЛА позволяют исключить постоянное накапливание с течением времени ошибки измерения, присущее всем инерциальным средствам навигации, а также ошибки измерения не чувствительны к перегрузкам, которые возникают в случае нестационарного режима полета ЛА.
Источники информации
1. Александров А.С., Арно Г.Р. и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. - Санкт-Петербург, 1994. - 119 с.
2. Пельпор Д.С., Ягодкин В.В. Гироскопические системы. - М., Высшая школа, 1977. - 216 с.
3. Агаджапов П.А., Воробьев В.Г. и др. Автоматизация самолетовождения и управления воздушным движением. - М.: Транспорт, 1980. - 357 с.
4. О'Нейл Э. Введение в статистическую оптику. Пер. с англ. Под ред. Паршина П.Ф. - М.: Мир, 1966. - 354 с.
5. Азам Р., Башара П. Эллипсометрия и поляризованный свет. - М.: Мир, 1981. - 588 с.
6. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985. - 344 с.
7. Ширман Я.Д., Голиков В.Н. и др. Теоретические основы радиолокации. - М.: «Советское радио», 1970. - 560 с.
8. Дрябкин А.Л. и др. Антенно-фидерные устройства. - М.: «Советское радио», 1974. - 535 с.
9. Жук М.С., Молочков Ю.Б. Проектирование антенно-фидерных устройств. - М.: «Энергия», 1966.
10. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М.: «Советское радио», 1966. - 440 с.
11. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: «Советское радио», 1970. - 383 с.


Нулевой радиометр
Способ формирования диаграммы направленности приемной линейной антенной решетки
Способ получения состава композиционного полимерного материала с заданными свойствами
Нулевой радиометр
Навигационный радиооптический групповой отражатель кругового действия со светоотражающими гранями
Навигационный радиооптический групповой отражатель кругового действия с покрытыми алюминиевой фольгой гранями
Навигационный радиооптический уголковый отражатель направленного действия с треугольными гранями, покрытыми алюминиевой фольгой
Навигационный радиооптический групповой отражатель кругового действия в горизонтальной плоскости
Навигационный радиооптический групповой поляризационно-анизотропный отражатель кругового действия
Поляризационно-модуляционная радиомаячная система измерения угла крена летательного аппарата
Навигационный радиооптический групповой отражатель кругового в горизонтальной плоскости действия с покрытыми алюминиевой фольгой гранями

