Результат интеллектуальной деятельности: СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области спутниковой навигации и предназначено для определения углового положения объекта в пространстве и измерения вектора угловой скорости его вращающейся части.
Существующая навигационная аппаратура спутниковой радионавигационной системы ГЛОНАСС/GPS позволяет определить координаты объекта X, Y и Н, некоторые образцы могут также определять пространственное положение объекта (курс, крен, тангаж), но не редко возникает задача непосредственного определения направления оси вращения и текущей угловой скорости вращающейся части объекта (далее вращающийся объект), которую следует решить.
Известен способ определения угловой скорости объекта, включающий жесткое закрепление на объекте трехкоординатного измерителя ускорения и двух двухкоординатных гироскопических датчиков угловой скорости, реализованных на базе динамически настраиваемых гироскопов, при этом первая и вторая измерительные оси первого датчика связаны соответственно с осями Х и Y объекта, вторая измерительная и первая резервная оси второго датчика связаны соответственно с осями Z и Х объекта, определение параметров основной и квадратурной составляющих дрейфов датчиков от ускорения силы тяжести Земли, измерение при произвольном положении объекта величин линейного ускорения во взаимно перпендикулярных осях X, Y, Z объекта, величин угловой скорости в тех же осях, вычисление истинных значений угловой скорости объекта в осях X, Y, Z [1].
Недостатком известного способа является громоздкость оборудования и наличие ошибок в определении угловой скорости объекта от влияния дрейфов гироскопов, от ускорения при реализации его в устройствах, не имеющих стабилизированной в плоскости горизонта и в азимуте платформы, т.е. в бесплатформенных курсовертикалях и в инклинометрах.
Наиболее близким к заявляемому является известный способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов [2]. Этим способом, основанным на приеме сигналов от n космических аппаратов двумя или более антенно-приемными устройствами, по которому выделяют сигнал с частотой Доплера, определяют набег фаз за интервал времени измерения и определяют угловое положение объекта. При круговом или секторном режиме обзора воздушного пространства возникает необходимость измерения текущего азимута, угловой скорости антенны и отклонения оси вращения антенны от вертикали.
К недостаткам известного способа следует отнести невозможность непосредственного измерения вектора угловой скорости вращающегося объекта, что отражается на точности работы радиолокационной системы.
В основу изобретения положена задача определения ориентации, контроля и управления вращающегося объекта, расположенного как на стабилизированной, так и на нестабилизированной в плоскости горизонта платформе (например, контроль вращения и текущей ориентации антенны радиолокационного дальномера, расположенного на морском судне).
Поставленная задача решается тем, что в способе угловой ориентации объекта по радионавигационным сигналам космических аппаратов, по которому радионавигационные сигналы от n космических аппаратов принимают антенно-приемным устройством объекта, по принятым радионавигационным сигналам измеряют координаты объекта, согласно изобретению прием радионавигационных сигналов осуществляют не менее чем двумя разнесенными антеннами антенно-приемного устройства, размещенными непосредственно на вращающейся части объекта, вычисляют два вектора-приращения в 3-х последовательно измеренных точках координат антенн, определяют направление оси вращения по нормальному вектору плоскости вращения и модуль угловой скорости объекта как
где j=1, 2, …, m - номер антенны;
k - номер точки текущего измерения координат антенны;
Bj - база j-ой антенны;
ΔBj(k+1) - вектор приращения координат j-ой антенны между первой и второй (из 3-х последовательно измеренных) точками текущего измерения;
ΔBj(k+2) - вектор приращения координат j-ой антенны между второй и третьей (из 3-х последовательно измеренных) точками текущего измерения;
Δt - дискретность текущих измерений, с.
Способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов осуществляют следующим образом.
Антенны навигационного антенно-приемного устройства размещают непосредственно на вращающемся объекте. При этом количество антенн и база (расстояние между двумя любыми антеннами) может иметь различное значение и определяется в зависимости от геометрических размеров вращающегося объекта. Рассмотрим заявляемый способ на примере с использованием двух антенн навигационного антенно-приемного устройства (например, однобазовый интерферометр), расположенных на вращающемся объекте так, что одна из антенн размещена на оси вращения объекта, а вторая - на некотором удалении от оси вращения. В качестве измеряемой величины является разность двух последовательно измеренных координат вектора базы (расстояние от антенны, размещенной на оси вращения, до антенны, размещенной на некотором удалении от оси вращения объекта) и вычисление векторов приращений координат вектора базы.
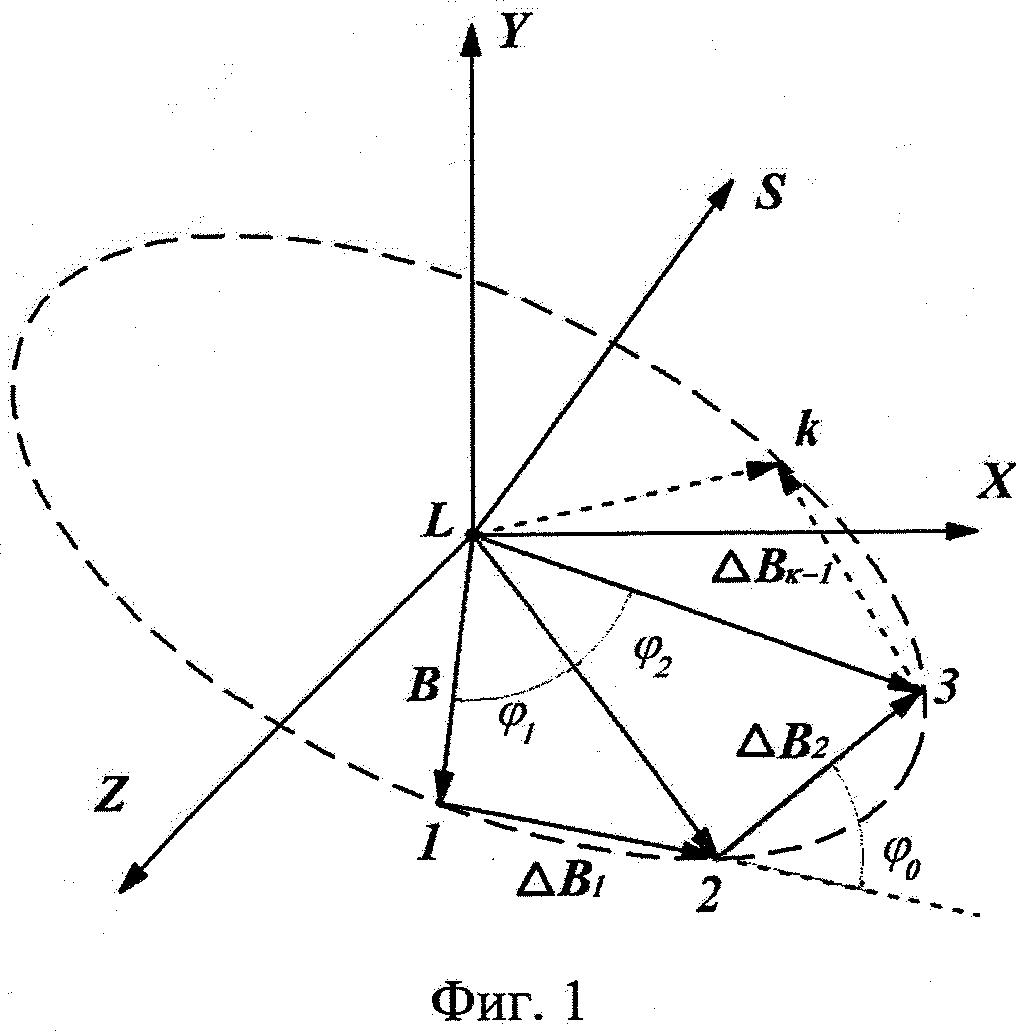
На фиг.1 схематично изображена траектория вращения однобазового интерферометра, одна из антенн которого размещена на оси вращения (т. L), а вторая - на некотором удалении от оси вращения. Здесь B - база однобазового интерферометра (расстояние между антеннами); точки 1, 2, 3, … k - последовательно измеренные координаты антенны, удаленной от оси вращения; ΔB1, ΔB2 - векторы приращения координат антенны, удаленной от оси вращения, соответственно между первой и второй, второй и третьей точками текущих измерений.
На основе измерений фазовых сдвигов сигналов навигационных космических аппаратов (НКА) между двумя антеннами, представляющими собой однобазовый интерферометр, определяют ориентацию вектора базы [3]:

где λi - длина волны сигнала i-го навигационного космического аппарата (НКА);
Ф - фазовый сдвиг сигналов НКА между антеннами;
ΔR - разность хода сигналов НКА между антеннами;
X, Y, Z -координаты вектора-базы;
kxi,yi,zi - направляющие косинусы векторов-направлений между вращающимся объектом и i-м навигационным космическим аппаратом (НКА).
В начальный момент времени t0 (т.1 на фиг.1) система уравнений (1) при наблюдении n НКА запишется в виде:

К моменту времени t1 (т.2 на фиг.1) направляющие косинусы векторов-направлений на НКА, направляющие косинусы вектора базы, фазовые сдвиги и длина волны навигационных сигналов за счет перемещения НКА и вектора базы примут значения:
kx,y,z1i=kx,y,z0i+Δkx,y,z1i,
x1=x0+Δx1, y1=y0+Δy1, z1=Δz0+z1,
Ф1i=Ф0i+ΔФ1i, λ1i=λ0i+Δλ1i.
Систему уравнений (1) для момента времени t1 можно записать в виде:

Для определения вектора приращения вектора базы (из т.1 в т.2) составим разностную систему уравнений, вычитая из уравнений системы (3) соответствующие уравнения системы (2):

Приращение разности фаз сигналов НКА имеет две составляющие, которые равны:
 - за счет изменения расположения НКА и вращения объекта;
- за счет изменения расположения НКА и вращения объекта;
 - за счет изменения длины волны принимаемых радионавигационных сигналов.
- за счет изменения длины волны принимаемых радионавигационных сигналов.
Поскольку длина волны принимаемых радионавигационных сигналов изменяется незначительно, то приращением разности фаз за счет изменения длины волны можно пренебречь.
Система уравнений (4) с учетом динамики вращения объекта в общем случае включает шесть неизвестных: три составляющие начальных координат вектора базы в момент времени t0 (т.1 фиг.1) и три составляющие приращений координат вектора базы за время текущих измерений Δt (т.2 фиг.1) Для решения (4) необходимо принять сигналы шести НКА. Посредством фазовых измерений на однобазовый интерферометр можно с высокой точностью определить текущее положение, траекторию движения вектора базы и величину угловой скорости вращающегося объекта.
Поскольку векторы приращения координат вектора базы неколлинеарны и ортогональны оси вращения, то направление нормального вектора плоскости вращения S (направление оси вращения) можно определить через их векторное произведение

где ΔB1 - вектор приращения координат вектора базы от т.1 к т.2;
ΔB2 - вектор приращения координат вектора базы от т.2 к т.3.
По определению вектор угловой скорости направлен так, чтобы из его конца вращение тела было видно происходящим против часовой стрелки [5]. Для правильного определения направления вектора оси вращения вектор ΔB1 должен предшествовать по времени вектору ΔB2.
Модуль нормального вектора плоскости вращения S равен:

Угол φ0 - среднее значение угла поворота вектора базы (объекта)

где B - база интерферометра;
φ1 - угол поворота вектора базы из т.1 в т.2;
φ2 - угол поворота вектора базы из т.2 в т.3.
Модуль угловой скорости:

где Δt - дискретность текущих измерений.
Заметим, что для вычисления параметров вращения не требуется предварительная калибровка угломерной системы, которая заключается в привязке координат вектора базы к строительным осям вращающегося объекта. Дискретность последовательно производимых измерений приращения координат вектора базы устанавливается не более того периода, за время которого вектор база поворачивается на 90 градусов. При определении параметров ориентации вращающегося объекта удобно применить динамические методы измерения угловой ориентации [4]. Основным достоинством динамических методов является то, что это беспереборные методы, в которых не требуется устранять фазовую неоднозначность.
Результаты исследования показали, что имеет место пороговая минимальная скорость вращения объекта, при которой невозможно определить изменение координат антенн.
Действительно, направление нормального вектора S плоскости вращения зависит от угла между векторами приращения, входящими в произведение (5). Если же угол между векторами приращения меняет знак, то и вычисленный вектор S плоскости вращения также поменяет знак на противоположный. Для этого достаточно, чтобы погрешность измерения (задаваемая аппаратурой) превысила величину ΔBj(k+1)·sin(ωΔt). Примем эту величину как предельное значение погрешности, и выразив ее через базу Bj и угловую скорость вращения,

получим

Для примера, приняв базу - 2 м, среднеквадратическое отклонение приращения координат (погрешность измерения) - 5 мм, дискретность измерений - 1 с, получим минимальную угловую скорость 0,5 об/мин. Для уменьшения погрешности измерения целесообразно применение аппаратуры (например, МРК-32), в которой псевдодальность измеряется по фазе несущей частоты НКА, при этом погрешность определения направления оси вращения уменьшается с ростом длины базы и угловой скорости вращающегося объекта.
Таким образом, измерение текущих направления оси вращения и угловой скорости вращающегося объекта с применением спутниковой радионавигационной аппаратуры, расположенной как на стабилизированной, так и на нестабилизированной в плоскости горизонта платформе, позволяет производить оперативный контроль за его вращением с высокой точностью. Контроль же положения антенной системы в процессе работы позволит повысить точность радиолокационной системы, а также уменьшить нагрузку на поворотный механизм за счет коррекции оси вращения.
Источники информации
1. Пат. RU 2079844 Российская Федерация, МПК6 G01P 9/00. Способ определения угловой скорости объекта./ Будкин В.Л., Джанджгава Г.И., Дремин A.M., Мартеев И.П., Панфилов Н.М., Федоров А.В.; заявитель акционерное общество "Раменское приборостроительное конструкторское бюро", - №94018303/28; заявл. 18.05.1994; опубл. 20.05.1997.
2. Пат. RU 2122217 Российская Федерация, МПК6 G01S 5/02. Способ угловой ориентации объекта по сигналам навигационных космических аппаратов./ А.М. Алешечкин, Ю.Л. Фатеев, Чмых М.К.; заявитель ГОУ ВПО «Красноярский государственный технический университет», - №97107921/09; заявл. 15.05.1997; опубл. 20.11.1998.
3. Фатеев, Ю.Л. Определение угловой ориентации на основе глобальных навигационных спутниковых систем. // Радиотехника, №7, 2002. - С.51-57
4. Фатеев Ю.Л. Динамические методы измерения угловой ориентации объектов на основе систем ГЛОНАСС/GPS // Электронный журнал «Исследовано в России», 70, стр.770-780, 2004. URL: http://zhurnal.ape.relarn.ru/articles/2004/070.pdf.
5. Яворский Б.М., Детлаф А.А., Лебедев А.К. Справочник по физике для инженеров и студентов ВУЗов - М.: Оникс, 2007. - 1056 с.
Способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов, по которому радионавигационные сигналы от n космических аппаратов принимают антенно-приемным устройством объекта, по принятым радионавигационным сигналам измеряют координаты объекта, отличающийся тем, что прием радионавигационных сигналов осуществляют не менее чем двумя разнесенными и размещенными непосредственно на вращающемся объекте антеннами антенно-приемного устройства, измеряют координаты точек траектории вращения антенн, вычисляют два вектора приращения в 3-х последовательно измеренных точках координат антенн, определяют направление оси вращения по нормальному вектору плоскости вращения и модуль угловой скорости объекта как ,где j=1, 2, …, m - номер антенны;k - номер точки текущего измерения координат антенны;B - база j-ой антенны;ΔB - вектор приращения координат j-ой антенны между первой и второй (из 3-х последовательно измеренных) точками текущего измерения;ΔB - вектор приращения координат j-ой антенны между второй и третьей (из 3-х последовательно измеренных) точками текущего измерения;Δt - дискретность текущих измерений, с.
Газостатический подшипник
Способ поиска шумоподобных сигналов с минимальной частотной манипуляцией
Устройство для нанесения покрытий на порошки
Способ получения прозрачной проводящей пленки insno
Способ дистанционного обследования объектов электрических сетей
Пульсовый оксиметр
Способ определения погрешности формирования псевдодальности навигационного сигнала
Устройство для теплоизоляции скважины в многолетнемерзлых породах
Устройство для бестраншейной замены трубопровода
Стенд для градуировки тензоэлементов
Способ определения термоокислительной стабильности смазочных материалов
Устройство для фокусировки типа "линза люнеберга"
Грузоподъемный механизм
Газостатический подшипник
Способ поиска шумоподобных сигналов с минимальной частотной манипуляцией
Устройство для нанесения покрытий на порошки
Способ получения прозрачной проводящей пленки insno
Способ дистанционного обследования объектов электрических сетей
Пульсовый оксиметр
Способ определения погрешности формирования псевдодальности навигационного сигнала

