Результат интеллектуальной деятельности: СИСТЕМА НАВИГАЦИИ БУКСИРУЕМОГО ПОДВОДНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к гидроакустическим навигационным системам, а именно к системам навигации подводных аппаратов относительно судна обеспечения, и может быть использовано для определения координат буксируемого подводного аппарата, осуществляющего гидролокацию рельефа дна.
Для изучения геоморфологического строения морского дна, например с целью выявления закономерностей распределения газовых гидратов в океанических отложениях, применяют буксируемые подводные аппараты (БПА), на которых установлено такое измерительное оборудование, как гидролокаторы бокового обзора (ГБО), ЛЧМ (линейно-частотная модуляция) профилографы и др. При этом возникает задача навигации подводного аппарата с целью приведения в однозначное соответствие объектов полученной карты дна с их точными географическими координатами.
Размещение измерительного оборудования на буксируемом подводном аппарате позволяет не только расширить зону проведения измерений (по сравнению со случаем, когда измерительное оборудование установлено на автономном подводном аппарате), но и повысить разрешение изображения дна (по сравнению со случаем, когда измерительное оборудование установлено на судне). Поскольку изображение дна строится относительно положения БПА, то необходимо создать систему определения географических координат БПА в режиме реального времени. Эта задача может быть решена с помощью различных гидроакустических навигационных систем.
Известна гидроакустическая синхронная дальномерная навигационная система дальнего действия [патент на изобретение RU №228914; МПК G01S 15/08, автор Касаткин Б.А.; опубликовано 10.12.2006], содержащая донную навигационную базу из М гидроакустических маяков-ответчиков с различными частотами ответа, в которой подводный объект генерирует акустические импульсы на частоте запроса, которые затем принимаются маяками-ответчиками и переизлучаются обратно на частоте ответа. Период времени между излучением импульса запроса и приемом переизлученного импульса для каждого маяка-ответчика определяется с помощью счетчиков. Пересчет полученных значений времени в дальность между маяками-ответчиками и подводным объектом осуществляет блок преобразования временных интервалов в дистанции, значения с выхода которого поступают на входы вычислителя координат объекта.
Конструктивными признаками аналога, совпадающими с существенными признаками заявляемой системы, являются: подводный аппарат, координаты которого необходимо определить, антенны подводной навигации, гидроакустический приемопередатчик.
Однако известный аналог обладает рядом недостатков, главными из которых можно считать то, что необходимо иметь заранее оснащенный маяками-ответчиками участок акватории, на котором планируется проводить поисковые работы, при этом пространственные координаты маяков-ответчиков должны иметь точную привязку к местности, а на маяках-ответчиках и подводном объекте должны быть установлены высокоточные часы. Все это приводит к удорожанию разведочных работ и затягиванию сроков их проведения.
Известна также система определения местоположения подводного аппарата [патент на изобретение RU №2062482; МПК G01S 15/06; авторы Черников В.Н., Котяшкин С.И.; опубликовано 20.06.1996]. В рассматриваемой системе определение координат подводного аппарата осуществляется за счет комплексного использования результатов измерений временных и фазовых характеристик сигналов, принимаемых системой антенн, установленной под днищем судна, в которой приемные элементы распределены на расстояниях кратных половине длины акустической волны.
Конструктивными признаками аналога, совпадающими с существенными признаками заявляемого устройства, являются: установленная на днище судна антенна подводной навигации, гидроакустический приемник и приемная антенна, установленные на подводном аппарате,
Однако известный аналог обладает недостатками, главный из которых - низкие скорости передвижения судна и подводного аппарата, что не позволяет получить большую карту рельефа дна, ограничивает зону подводных наблюдений и увеличивает сроки проведения исследования заданного участка дна.
Известна система определения координат подводных объектов [патент на изобретение RU №2004124358; МПК G01S 5/00; авторы Лисицын Е.Д., Кузмин Ю.И., Лейкин Ф.И.; опубликовано 27.01.2006], принятая за прототип и содержащая буксирующий объект, буксируемый подводный аппарат и буксируемую систему буев, в которой каждый буй снабжается Global Positioning System (GPS) приемником, высокостабильными синхронизированными по GPS часами, гидроакустической приемной системой, контроллером-измерителем временных интервалов. Все перечисленные объекты представлены в виде единой буксируемой системы, сохраняющей в постоянстве параметры длинной и короткой измерительных баз, а буксируемый объект снабжен высокостабильными часами и устройством определения глубины погружения буксируемого объекта.
Конструктивными признаками аналога, совпадающими с существенными признаками заявляемого устройства, принятого нами за прототип, являются наличие буксирующего судна и буксируемого подводного аппарата, координаты которого определяются относительно координат буксирующего судна, наличие GPS приемника, оснащение буксируемого аппарата системой гидроакустической навигации и устройством измерения глубины погружения буксируемого аппарата.
Однако известный аналог обладает недостатками, среди которых необходимо отметить сложность построения и настройки буксируемой системы буев, образующих измерительную базу системы навигации подводного аппарата. Каждый буй должен быть оснащен средствами определения собственных координат по спутниковым навигационным системам и высокоточной системой подводной навигации для определения координат подводного объекта.
Недостатки прототипа устраняются заявляемой системой навигации буксируемого подводного аппарата.
Техническим результатом изобретения является уменьшение погрешности определения координат буксируемого подводного аппарата с одновременным снижением трудозатрат при выполнении подводных исследовательских работ.
Технический результат достигается тем, что система навигации буксируемого подводного аппарата содержит установленные на буксирующем судне GPS приемник, систему управления, многолучевой эхолот (МЛЭ), набортный блок гидролокатора, антенну подводной навигации и установленные на буксируемом подводном аппарате (БПА) гидролокатор бокового обзора (ГБО), управляющее устройство и транспондер подводной навигации.
При этом GPS приемник подключен к первому порту системы управления, ко второму порту которой подключен многолучевой эхолот, а к третьему порту системы управления подключен первый порт набортного блока гидролокатора, второй порт которого подключен к антенне подводной навигации, при этом третий порт набортного блока гидролокатора соединен через кабель-трос с размещенным на подводном буксируемом аппарате управляющим устройством, соединенным с транспондером подводной навигации и гидролокатором бокового обзора.
Отличительными признаками, доказывающими новизну заявляемой системы навигации буксируемого подводного аппарата, являются те, что сначала определяются координаты БПА в системе (X, Y, Z), за начало отсчета которой выбрано место расположения антенны GPS приемника на буксирующем судне, путем фазовой пеленгации БПА с помощью набортного блока гидролокации, антенны подводной навигации и транспондера подводной навигации, а затем система управления производит корректировку полученных координат БПА путем цифровой обработки по стандартному кросскорреляционному алгоритму изображений рельефа дна, полученных с помощью гидролокатора бокового обзора и многолучевого эхолота. Скорректированные координаты БПА на основании данных GPS приемника пересчитываются в географические координаты.
Таким образом, из уровня техники не известно влияние признаков, сходных с отличительными признаками заявляемой системы навигации буксируемого подводного аппарата, на достижение заявляемого технического результата, а именно: уменьшение погрешности определения координат буксируемого подводного аппарата с одновременным снижением трудозатрат при выполнении подводных исследовательских работ.
Получение нового технического результата при использовании новой совокупности отличительных признаков свидетельствует о соответствии заявляемого изобретения критерию «изобретательский уровень».
Изобретение поясняется чертежами, где
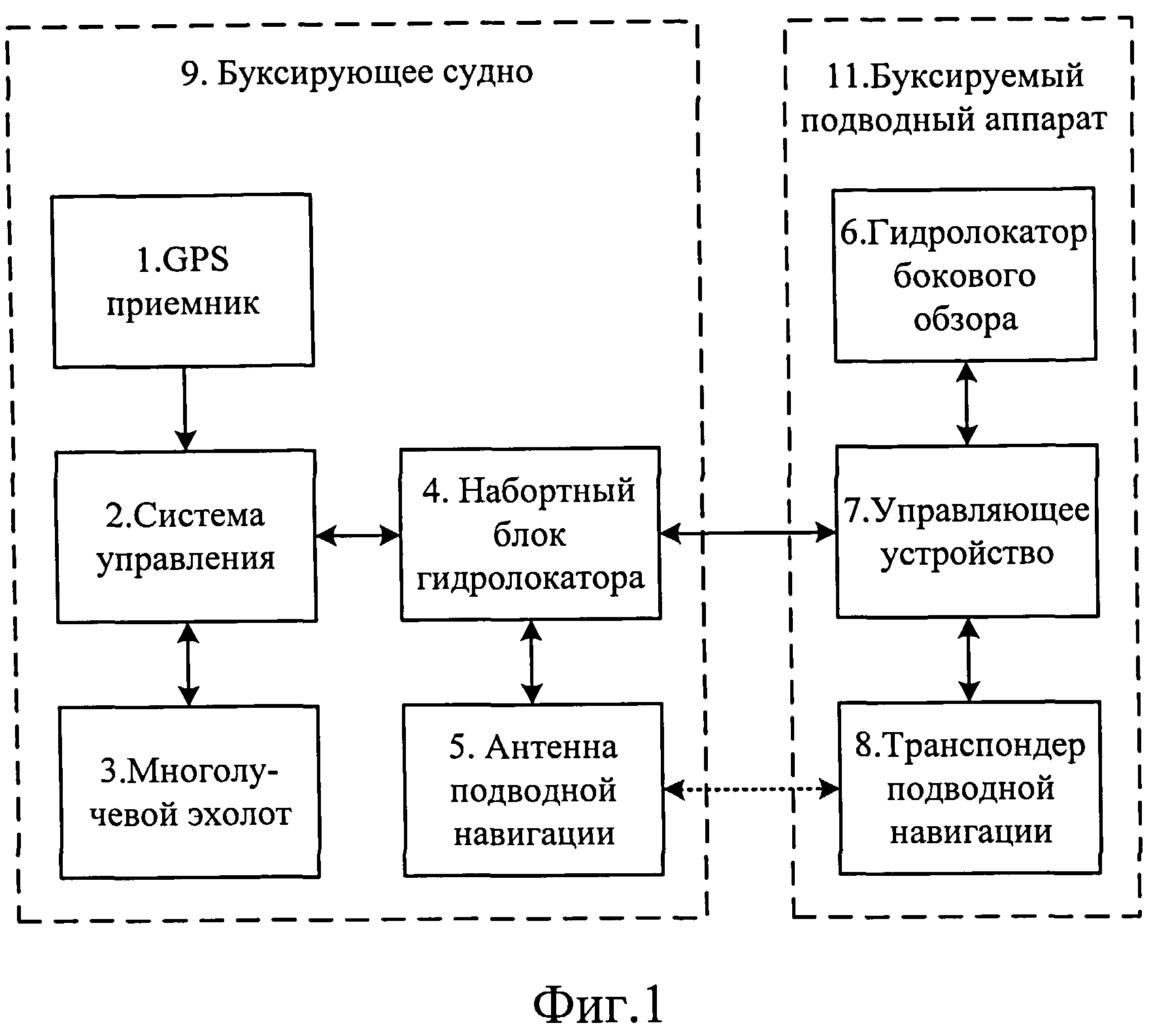
На фиг.1 показана структурная схема системы навигации буксируемого подводного аппарата.
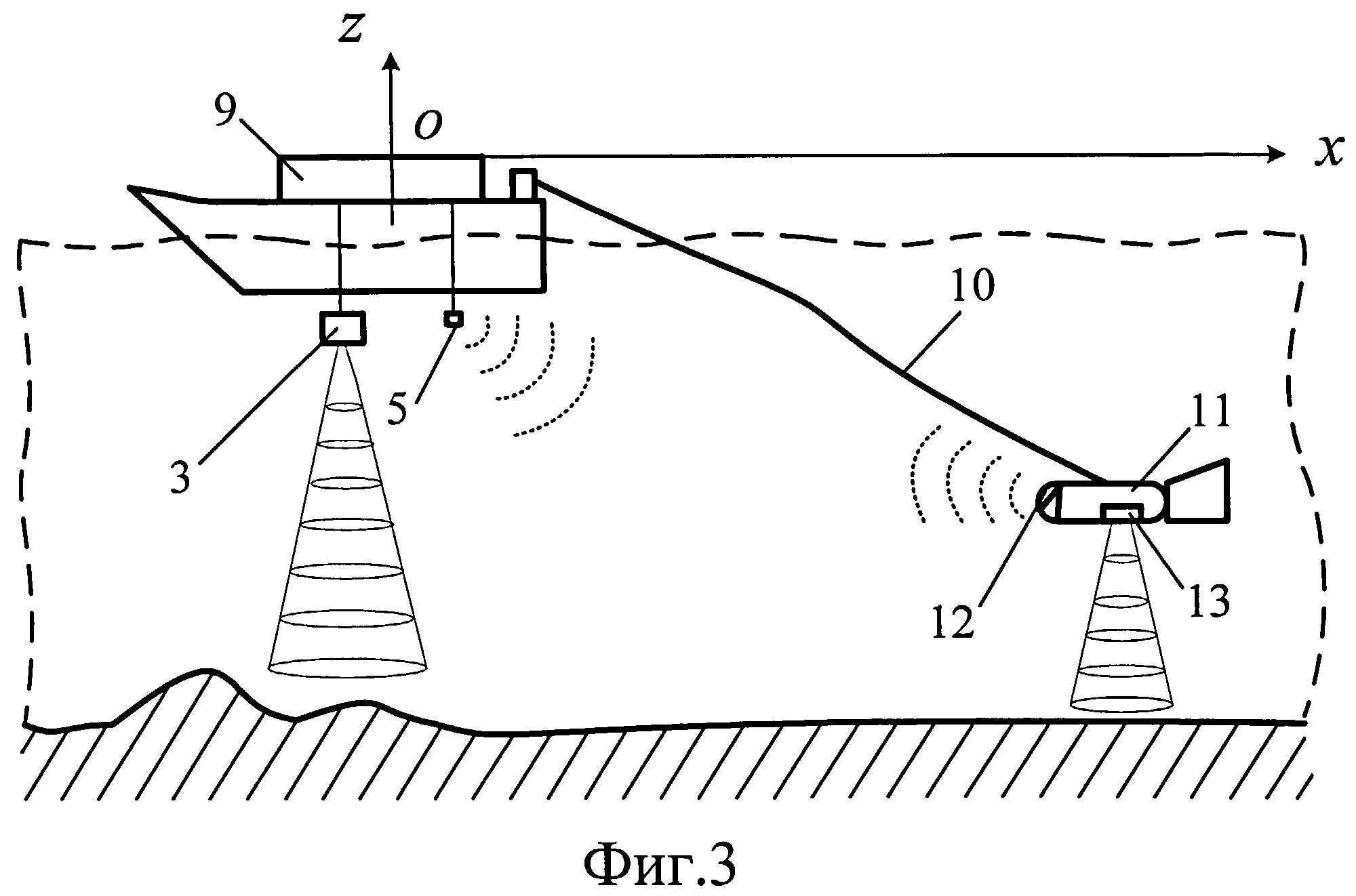
На фиг.2 представлена иллюстрация метода определения координат буксируемого подводного аппарата в горизонтальной плоскости (вид сверху).
На фиг.3 приведена иллюстрация метода определения координат буксируемого подводного аппарата (БПА) в вертикальной плоскости (вид сбоку).
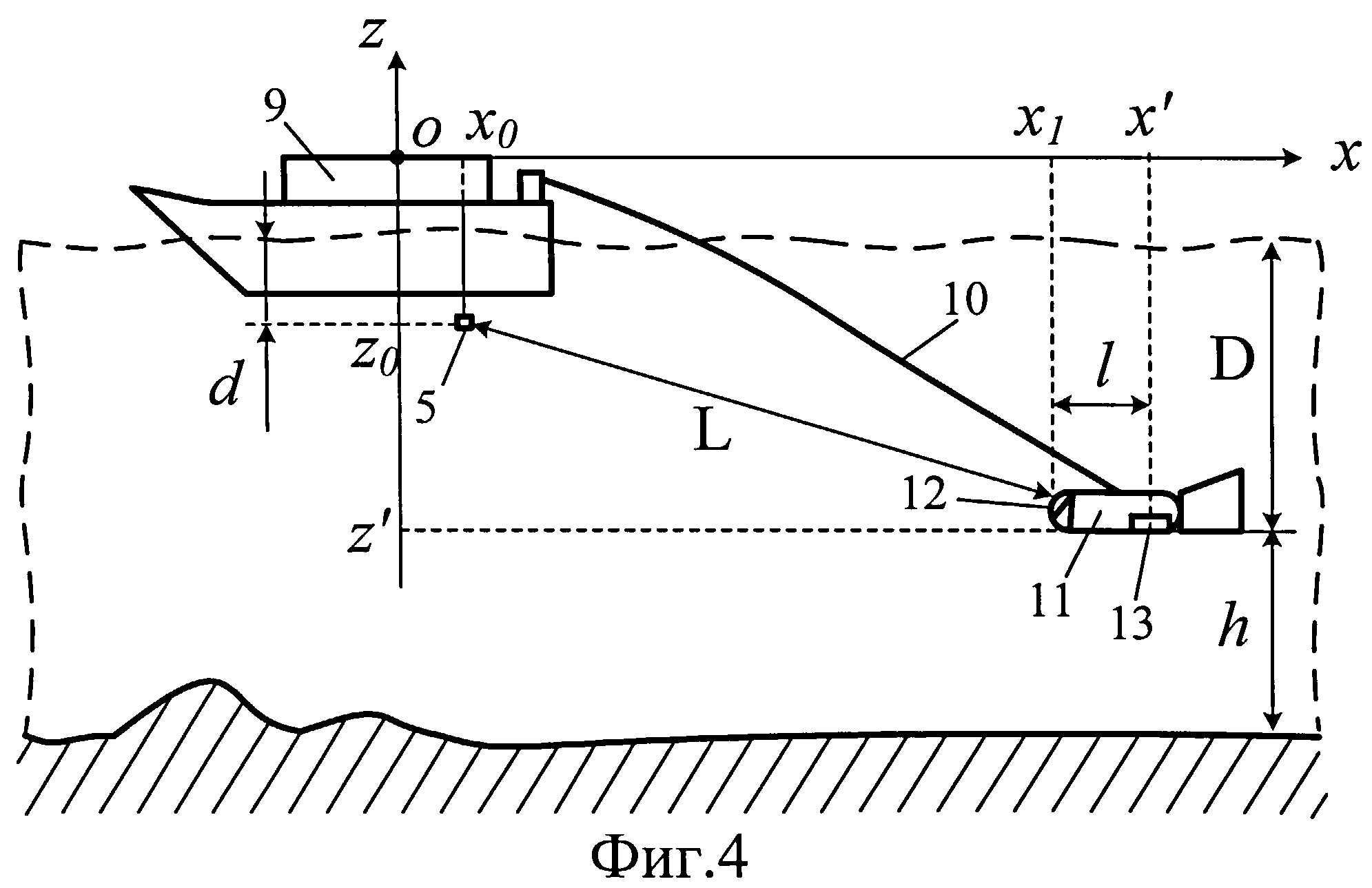
На фиг.4 изображена иллюстрация метода определения координат БПА в вертикальной плоскости с обозначенными углами, координатами и расстояниями, которые использованы в математических выражениях.
На фиг.5 показана трехмерная иллюстрация метода определения координат расположения элементов системы навигации буксируемого подводного аппарата в системе координат X, Y, Z.
На фигурах, поясняющих изобретение, введены следующие обозначения:
1 - GPS (Global Positioning System) приемник;
2 - система управления;
3 - многолучевой эхолот;
4 - набортный блок гидролокатора;
5 - антенна подводной навигации;
6 - гидролокатор бокового обзора;
7 - управляющее устройство;
8 - транспондер подводной навигации;
9 - буксирующее судно;
10 - кабель-трос;
11 - буксируемый подводный аппарат (БПА).
12 - антенна транспондера подводной навигации;
13 - антенна гидролокатора бокового обзора.
На фиг.1 показана структурная схема системы навигации буксируемого подводного аппарата.
Система навигации буксируемого подводного аппарата содержит установленные на буксирующем судне GPS приемник 1, систему управления 2, многолучевой эхолот 3, набортный блок гидролокатора 4, антенну подводной навигации 5 и буксируемый подводный аппарат, содержащий гидролокатор бокового обзора 6, управляющее устройство 7 и транспондер подводной навигации 8.
GPS приемник 1 подключен к первому порту системы управления 2. При этом ко второму порту системы управления 2 подключен многолучевой эхолот 3, а к третьему порту системы управления 2 подключен первый порт набортного блока гидролокатора 4, второй порт которого подключен к антенне подводной навигации 5.
Кроме того, третий порт набортного блока гидролокатора 4 подключен через кабель-трос к управляющему устройству 7, соединенному с транспондером подводной навигации 8 и гидролокатором бокового обзора 6.
При этом расположение на буксирующем судне 9 антенны GPS приемника 1 (точка О на фиг.2, фиг.3, фиг.4 и фиг.5), многолучевого эхолота 3 и антенны подводной навигации 5 фиксировано, расстояния их взаимного положения измерены и заданы в базе данных системы управления 2.
Система навигации буксируемого подводного аппарата работает следующим образом.
GPS приемник 1 в режиме реального времени определяет координаты расположения GPS антенны, которые затем по цифровой шине передаются системе управления 2. Одновременно с этим многолучевой эхолот 3 осуществляет трехмерное сканирование дна узкими лучами фиксированной ширины и передает измеренные данные в систему управления 2, которая сопоставляет полученную многолучевым эхолотом 3 трехмерную карту расстояний до подводных объектов с координатами, полученных от GPS приемника 1.
Гидролокатор бокового обзора 6 осуществляет сканирование дна узким лучом, в результате чего получается детальная картина рельефа дна, объекты которой расположены относительно траектории движения БПА 11. Эти данные (карта дна), а также измеренная гидролокатором бокового обзора 6 величина заглубления БПА 11 и расстояние от БПА 11 до дна, передаются через управляющее устройство 7 по кабель-тросу 10 в набортный блок гидролокатора 4, который затем передает эти данные системе управления 2.
При этом для определения положения БПА 11 используется система подводной навигации, работающая по принципу фазовой пеленгации и включающая набортный блок гидролокатора 4, антенну подводной навигации 5 и транспондер подводной навигации 8. Набортный блок гидролокатора 4 через передающий гидрофон антенны подводной навигации 5 посылает сигнал запроса и одновременно и запускает имеющийся в его составе счетчик. Гидроакустический сигнал, излученный в ответ антенной транспондера подводной навигации 12, регистрируется двумя приемными гидрофонами антенны подводной навигации 5, которые расположены в горизонтальной плоскости.
По разности фаз гидроакустического сигнала, зарегистрированного приемными гидрофонами антенны подводной навигации 5, набортный блок гидролокатора 4 определяет угол прихода сигнала в горизонтальной плоскости (угол α на фиг.5). Время возврата гидроакустического сигнала tз, измеренное счетчиком, а также величина угла α передаются в систему управления 2.
Система управления 2 производит вычисление координат БПА 11, обработку информации о рельефе дна, корректировку координат БПА 11 и записывает всю совокупность полученной информации в файл.
Для определения координат {x', y', z') БПА 11 система управления 2 выполняет следующие вычисления.
Скорость звука в воде определяется по формуле Лероя:

где c=c (T, S, z) - скорость звука в воде, м/с;
T - температура воды, °C;
S - соленость воды, %;
z - глубина, м.
Среднее значение скорости звука в воде для глубины, на которую опустился БПА 11, определяется путем интегрирования выражения (1):

где  - средняя скорость звука в воде, м/с;
- средняя скорость звука в воде, м/с;
D - заглубление БПА 11, м;
d - заглубление антенны подводной навигации 5, м.
По измеренному времени распространения гидроакустического сигнала вычисляется расстояние L между антенной подводной навигации 5 и антенной транспондера подводной навигации 12:

где L - расстояние между антенной подводной навигации 5 и антенной транспондера подводной навигации 12, м;
 - средняя скорость звука в воде для заданного заглубления БПА 11, м/с;
- средняя скорость звука в воде для заданного заглубления БПА 11, м/с;
tз - время возврата гидроакустического сигнала, с.
За начало отсчета выбрано место расположения антенны GPS приемника 1 (точка О на фиг.4). Координата антенны гидролокатора бокового обзора 13 по оси Oz относительно выбранного начала отсчета определяется по формуле:

где z' - координата антенны гидролокатора бокового обзора 13 по оси Oz, м;
z0 - координата антенны подводной навигации 5 по оси Oz, м;
d - заглубление антенны подводной навигации 5, м.
Угол прихода β гидроакустического сигнала на антенну подводной навигации 5 (показан фиг.5) в вертикальной плоскости равен

где β - угол прихода гидроакустического сигнала на антенну подводной навигации 5 в вертикальной плоскости относительно оси Oz, градусов.
Координата антенны гидролокатора бокового обзора 13 по оси Оx относительно выбранного начала отсчета находится по формуле:

где x' - координата антенны гидролокатора бокового обзора 13 по оси Оx, м;
x1 - координата антенны транспондера подводной навигации 12 по оси Ох, м;
l - расстояние между антенной транспондера подводной навигации 12 и антенной гидролокатора бокового обзора 13, м;
x0 - координата антенны подводной навигации 5 по оси Ох, м;
α - угол прихода гидроакустического сигнала на антенну подводной навигации 5 в горизонтальной плоскости относительно оси Ох, градусы.
Затем вычисляется координата антенны гидролокатора бокового обзора 13 по оси Оy относительно выбранного начала отсчета:

где y' - координата антенны гидролокатора бокового обзора 13 по оси Oy, м;
y0 - координата антенны подводной навигации 5 по оси Oy, м.
Для корректировки координат (x', y', z') подводного буксируемого аппарата система управления 2 по стандартному кросскорреляционному алгоритму (описанному, например, в [Токарев М.П. Адаптивные алгоритмы обработки изображений частиц для расчета мгновенных полей скорости / Токарев М.П., Маркович Д.М., Бильский А.В. // Вычислительные технологии. - 2007. - том 12. - №3. - С.109-131]) осуществляет цифровую обработку изображений рельефа дна, полученных с помощью гидролокатора бокового обзора 6 и многолучевого эхолота 3. Найденное смещение положения подводного объекта на карте дна, полученной гидролокатором бокового обзора 6, относительно положения того же самого подводного объекта на карте дна, полученной с помощью многолучевого эхолота 3, используется для уточнения координат БПА 11.
Полученные скорректированные координаты 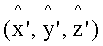 БПА 11 на основании данных GPS приемника пересчитываются в географические координаты (φ, λ,
БПА 11 на основании данных GPS приемника пересчитываются в географические координаты (φ, λ,  ) где φ - географическая широта, градусов; λ - географическая долгота, градусов.
) где φ - географическая широта, градусов; λ - географическая долгота, градусов.
Таким образом, достигнута поставленная цель, а именно: уменьшение погрешности определения координат буксируемого подводного аппарата с одновременным снижением трудозатрат при выполнении подводных исследовательских работ. При этом точность координат расположения объектов на детальной карте рельефа дна, полученной с помощью БПА 11, повышается за счет коррекции координат ПБА 11 посредством кросскорреляционной обработки изображений дна, полученных с помощью МЛЭ 3 и ГБО 6.
В качестве GPS приемника 1 может быть использован «NovAtel DL-V3», обладающий точностью определения координат до 10 см.
В качестве системы управления 2 может быть использовано оборудование National Instruments: корзина PXI-1062Q с контроллером PXIe-8133 и модулями расширения интерфейсов PXI-8432/4 и PXI-8234. Управляющая программа такой системы написана на языке Lab VIEW.
В качестве МЛЭ 3 может быть использован многолучевой эхолот «Корвет-МЛЭ-250» (ОАО концерн «Океанприбор»).
В качестве БПА 11 может быть использован гидролокатор бокового обзора «СОНИК-ЗД» (ВНИИОкеангеология), у которого уже имеется свой набортный блок гидролокатора, управляющее устройство и опционально подключение антенны подводной навигации и транспондера подводной навигации.
Система навигации буксируемого подводного аппарата, содержащая буксирующее судно, буксируемый подводный аппарат, GPS приемник, систему гидроакустической навигации, отличающаяся тем, что GPS приемник размещен на буксирующем судне, на котором дополнительно установлены многолучевой эхолот, антенна подводной навигации, система управления, набортный блок гидролокатора, а буксируемый подводный аппарат содержит гидролокатор бокового обзора, управляющее устройство и транспондер подводной навигации, при этом GPS приемник подключен к первому порту системы управления, ко второму порту которой подключен многолучевой эхолот, а к третьему порту системы управления подключен первый порт набортного блока гидролокатора, второй порт которого подключен к антенне подводной навигации, а третий порт набортного блока гидролокатора соединен через кабель-трос с размещенным на подводном буксируемом аппарате управляющим устройством, соединенным с транспондером подводной навигации и гидролокатором бокового обзора.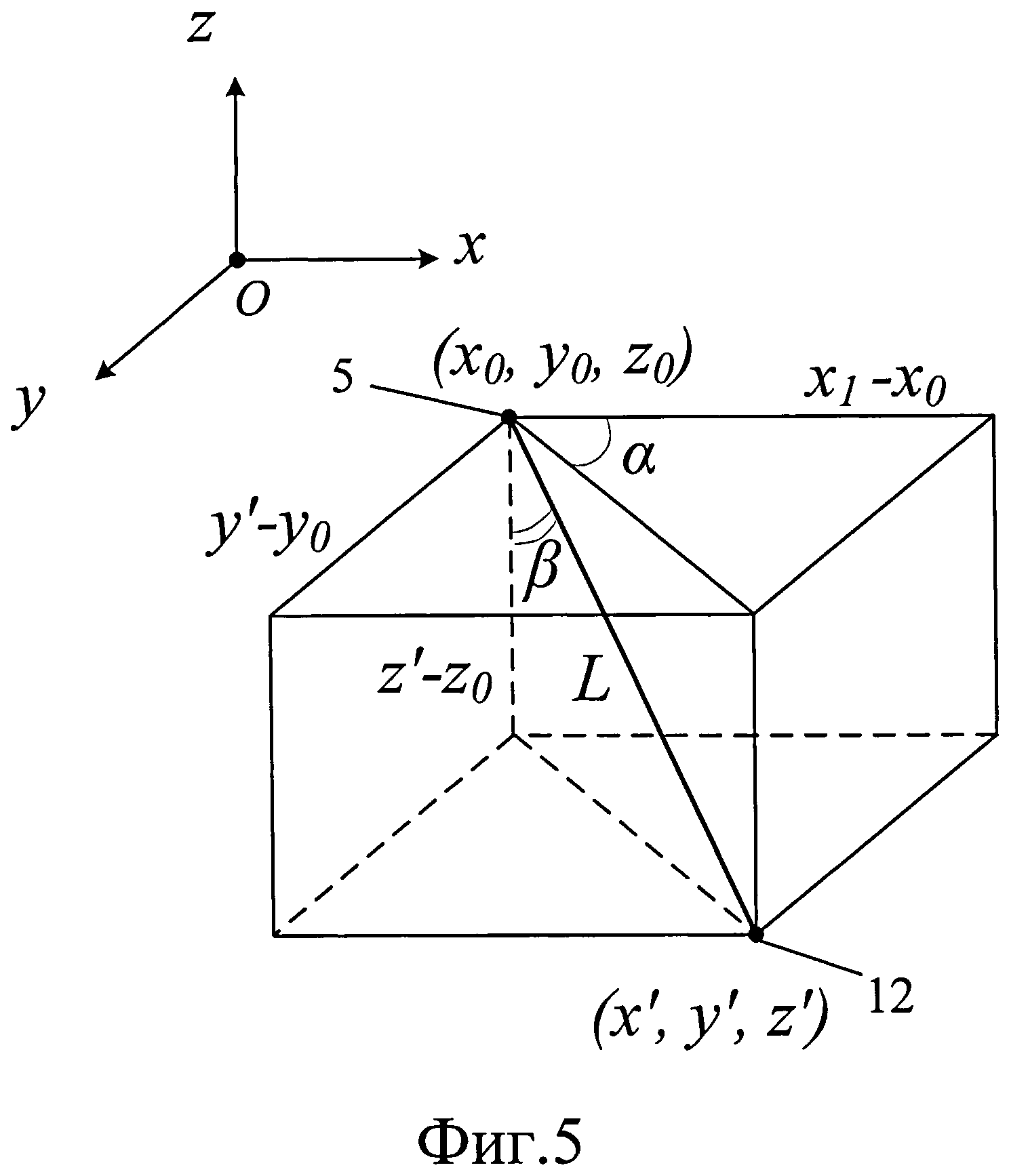
Способ бурения скважин на саморазрушающейся пене по замкнутому циркуляционному циклу, установка и композиция саморазрушающейся пены для его осуществления
Способ установки взрывораспорного анкера
Способ извлечения наноразмерных частиц из техногенных отходов производства флотацией
Способ реставрации анодных штырей алюминиевых электролизеров
Композиция, ингибирующая полимеризацию при переработке жидких продуктов пиролиза, способ ее получения и способ ингибирования полимеризации при переработке жидких продуктов пиролиза
Способ выделения углеродных наночастиц
Способ определения места короткого замыкания на воздушной линии электропередачи по замерам с двух ее концов (варианты)
Способ открытой разработки наклонно залегающих маломощных пластовых месторождений
Способ автоматизированного составления схемы дорожно-транспортного происшествия
Способ получения сорбента
Способ определения остаточных закалочных напряжений
Способ бурения скважин на саморазрушающейся пене по замкнутому циркуляционному циклу, установка и композиция саморазрушающейся пены для его осуществления
Способ установки взрывораспорного анкера
Способ извлечения наноразмерных частиц из техногенных отходов производства флотацией
Способ реставрации анодных штырей алюминиевых электролизеров
Композиция, ингибирующая полимеризацию при переработке жидких продуктов пиролиза, способ ее получения и способ ингибирования полимеризации при переработке жидких продуктов пиролиза
Способ выделения углеродных наночастиц
Способ определения места короткого замыкания на воздушной линии электропередачи по замерам с двух ее концов (варианты)
Способ открытой разработки наклонно залегающих маломощных пластовых месторождений
Способ автоматизированного составления схемы дорожно-транспортного происшествия

