СИСТЕМА АККУМУЛИРОВАНИЯ ЭНЕРГИИ ЭЛЕКТРОСТАНЦИИ
Вид РИД
Изобретение
ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[1] Настоящая заявка ссылается на приоритет предварительной заявки на патент США №61/233052, зарегистрированной 11.08.2009 г.Вильямом Р.Пейтцке (William R.Peitzke) и Мэттом Брауном (Matt Brown) под названием «Система аккумулирования энергии электростанции», содержание которой во всей полноте включается в настоящую заявку путем ссылки.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
ОБЛАСТЬ ТЕХНИКИ
[2] Настоящее изобретение, в общем, относится к аккумулированию и генерации электроэнергии. В частности, настоящее изобретение раскрывает систему для аккумулирования потенциальной энергии, использующую железнодорожные составы с электроприводом (железнодорожный состав в настоящей заявке определяется как множество вагонов), перевозящие загружаемые массы между нижним и верхним складами для аккумулирования потенциальной энергии путем использования электроэнергии электрической сети железнодорожными составами для транспортировки масс от нижнего складского помещения к верхнему и рекуперации потенциальной энергии и возврата в электрическую сеть путем электромагнитного рекуперативного торможения железнодорожных составов в процессе транспортировки масс от верхнего складского помещения к нижнему, с вспомогательным обеспечением, включающим обеспечение переменной и реактивной мощности и регулирование мощности вверх и вниз для возможности выравнивания.
ОБЛАСТЬ ТЕХНИКИ
[3] Электрическая сеть является все более усложняющейся системой, и согласование выработки электроэнергии с ее использованием является критическим элементом в поддержании стабильности ее работы. Данный вопрос усложняется еще больше в связи с добавлением альтернативных источников производства электроэнергии, таких как энергия ветра и энергия солнца, с которыми связаны возникающие вопросы взаимной согласованности производства электроэнергии. Необходимость в аккумулировании энергии для электростанции общего пользования как части электрической сети обусловливается растущими потребностями в оптимизации суточного графика нагрузок и качестве электроэнергии, включая частотное регулирование, управление напряжением, вращающийся резерв, невращающийся резерв и пуск из полностью обесточенного состояния. В настоящее время подсчитано, что в США потребность в запасах электроэнергии достигает 200000 МВт для изменения нагрузки и превышает 20000 МВт для качественного энергоснабжения.
[4] Аккумулирование энергии может быть достигнуто путем использования аккумуляторных батарей, емкостных систем аккумулирования энергии, систем аккумулирования кинетической энергии, таких как маховиков, или систем аккумулирования потенциальной энергии. Технологии аккумуляторных батарей для ионно-литиевых аккумуляторных батарей, проточных аккумуляторных батарей и натрий-серных аккумуляторных батарей (NaS) усовершенствуются, но обычно обеспечивают проектную мощность в районе всего лишь 50 МВт или меньше. Подобным же образом, емкостные системы аккумулирования энергии разумного масштаба обеспечивают мощность в диапазоне 1-10 МВт. Маховиковые системы аккумулирования энергии также обычно ограничены мощностью менее 20 МВт из-за ограничений, обусловленных физическим размером и конструкционными материалами.
[5] Традиционные устройства аккумулирования потенциальной энергии состоят из механических подъемных устройств, поднимающих грузы с преодолением силы тяжести, и гидроаккумулирующих электростанций, аккумулирующих энергию в виде потенциальной энергии воды, нагнетаемой вверх с преодолением силы тяжести. Механические подъемные устройства ограничены по высоте несколькими сотнями метров и, следовательно, требуют использования очень тяжелых грузов для аккумулирования существенного количества электроэнергии. Это ведет к очень большим затратам, что делает данные устройства дорогими и неэкономичными. В гидроаккумулирующей электростанции вода нагнетается из резервуара на нижней отметке на более высокую отметку; аккумулированная вода затем выпускается через турбины для преобразования аккумулированной энергии в электричество по требованию. Снижение КПД рабочего цикла аккумулирования энергии таких систем обычно составляет около 25%, а сложности в получении разрешений, строительстве и эксплуатации затрудняют внедрение аккумулирующих электростанций. Для того чтобы построить такую систему, может потребоваться более десяти лет.
[6] Таким образом, желательно обеспечить аккумулирование потенциальной энергии с возможностью генерации электроэнергии в диапазоне 100-2000 МВт с высоким КПД и уменьшенными требованиями к монтажу и капитальным вложениям.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[7] В соответствии с вариантами осуществления изобретения, описанными в настоящей заявке, предлагается высокоэффективная система аккумулирования электроэнергии для электростанции общего пользования. Большие массы транспортируются вверх для аккумулирования энергии и вниз для ее выделения. Электрифицированная рельсовая железнодорожная сеть обеспечивает перемещение масс между двумя складскими дворами (площадками), расположенными на разных высотных отметках, с помощью содержащих двигатели-генераторы челночных транспортных устройств, объединенных в железнодорожные составы и управляемых с помощью автоматизированной системы управления. Пример осуществления изобретения содержит рельсовую систему, имеющую верхний и нижний складские дворы с соединительным путем между верхним и нижним складскими дворами, и множество управляющих элементов для организации маршрутизации в системе. Транспортные устройства челночного типа имеют электрический двигатель-генератор, связанный с опорными колесами, и включают в себя опорную структуру и встроенный механизм переноса для перемещения масс с возможностью их выгрузки. Двигатель-генератор на транспортных устройствах подключен к электрической сети. Система управления, подключенная к электрической сети, транспортные устройства и управляющие элементы рельсовой системы выполняют первую последовательность управления для аккумулирования энергии, когда электрическая сеть имеет избыток мощности, и выполняют вторую последовательность управления для передачи мощности в электрическую сеть, когда ей требуется дополнительная мощность. Первая последовательность управления приводит к тому, что выбранные транспортные устройства забирают массы, размещенные на нижнем складском дворе и, используя двигатель-генератор в качестве двигателя, получающего питание от электрической сети, перемещают из нижнего складского двора в верхний складской двор, при этом управляющие элементы выполнены с возможностью направления по определенному маршруту транспортных устройств, которые затем выгружают массы на верхнем складском дворе. Вторая последовательность управления приводит к тому, что выбранные транспортные устройства забирают массы, размещенные на верхнем складском дворе, и, используя двигатель-генератор в качестве генератора, поставляют электроэнергию в электрическую сеть путем рекуперативного торможения выбранных транспортных устройств при движении с верхнего складского двора в нижний складской двор, а управляющие элементы выполнены с возможностью направлять по определенному маршруту выбранные транспортные устройства, которые затем выгружают массы на нижнем складском дворе.
[8] В примерах осуществления изобретения массы складируют на верхнем и нижнем складских дворах в подвешенном состоянии над складскими путями, и каждое транспортное устройство устанавливается под выбранные массы. Механизм переноса содержит опорный элемент на несущей конструкции на каждом транспортном устройстве и устанавливается под массу, которая складирована для обеспечения качения под нагрузкой.
[9] В примерах осуществления изобретения для приема высоковольтного питания подстанция соединена с электрической сетью, а путевая система распределения электроэнергии соединена с подстанцией с помощью трансформаторов, подключенных к системе распределения электроэнергии с заданными интервалами. К трансформаторам подсоединены шины питания, причем каждой шине питания соответствует путь в рельсовой системе. Каждое транспортное устройство содержит контакторы для подключения к шинам питания и к устройству управления тягой (traction control unit, TCU). Устройство TCU содержит схемы выпрямителя/инвертора для регулирования мощности, подключенные к двигателю-генератору, и блок управления для управления схемами усилителя/инвертора для ускорения, замедления или стационарного режима работы двигателя-генератора. Первый выпрямитель/инвертор со стороны электростанции и второй выпрямитель/инвертор со стороны двигателя-генератора эксплуатируются с использованием блока управления, контролирующего реактивную мощность в выпрямителе/инверторе со стороны электростанции с целью регулирования реактивной мощности (volt-ampere-reactive, VAR) электрической сети.
[10] В некоторых вариантах осуществления изобретения используются реверсивные обходные соединители, которые в ответ на сигнал с блока управления обеспечивают выборочный обход схем выпрямителя/инвертора с прямым подключением двигателя-генератора транспортных устройств на выбранном соединительном силовом пути к шине питания для синхронной работы после ускорения/замедления транспортных устройств. Регулировка напряжения в системе, в ответ на сигнал от электростанции, для регулирования вверх или регулирования вниз выполняется в каждом транспортном устройстве при асинхронной работе.
[11] В описанных вариантах осуществления изобретения предлагается способ предоставления дополнительных услуг электростанции с применением рельсовой системы и транспортных устройств, подключенных к электрической сети. При приеме команды на дополнительные услуги производится управление выбранной группой транспортных устройств в отношении реактивной мощности, ускорения и замедления для взаимодействия с электрической сетью для выполнения команды на дополнительные услуги. Если команда на дополнительные услуги является командой регулирования реактивной мощности, транспортные устройства, имеющие схемы выпрямителя/инвертора для подачи питания к двигателю-генератору, регулируют реактивную мощность в схемах выпрямителя/инвертера для настройки управления реактивной мощности в соответствии с требованиями электрической сети. Если команда на дополнительные услуги является командой по регулированию вверх/регулированию вниз, по меньшей мере один силовой путь из соединительных путей выбирается для асинхронной работы и двигатель-генератор на транспортных устройствах, проходящих выбранный силовой путь, управляется для регулирования вверх или регулирования вниз мощности, подаваемой в электрическую сеть или получаемой из электрической сети.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
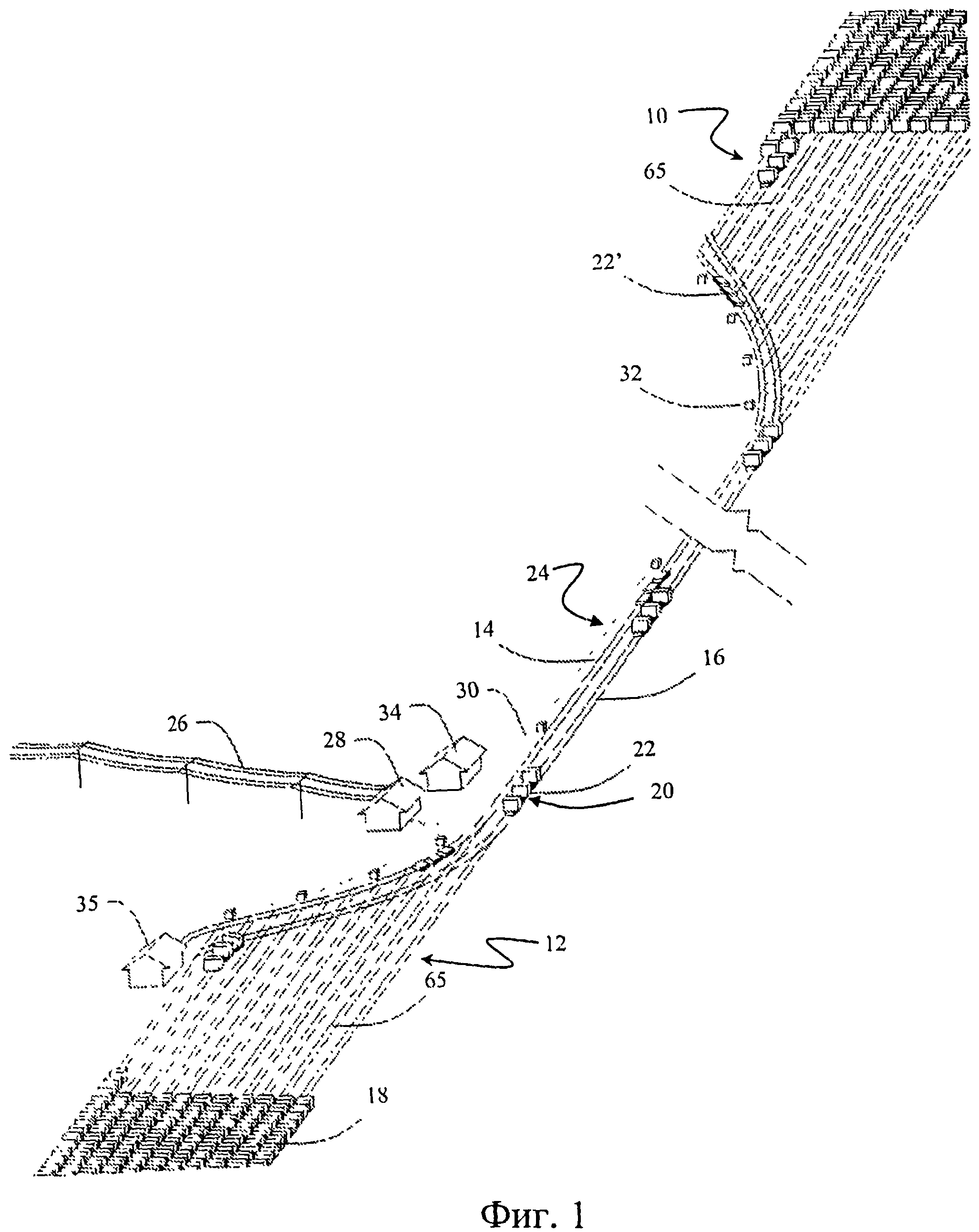
[12] На фиг.1 - приведен общий вид в перспективе варианта известной системы аккумулирования энергии;
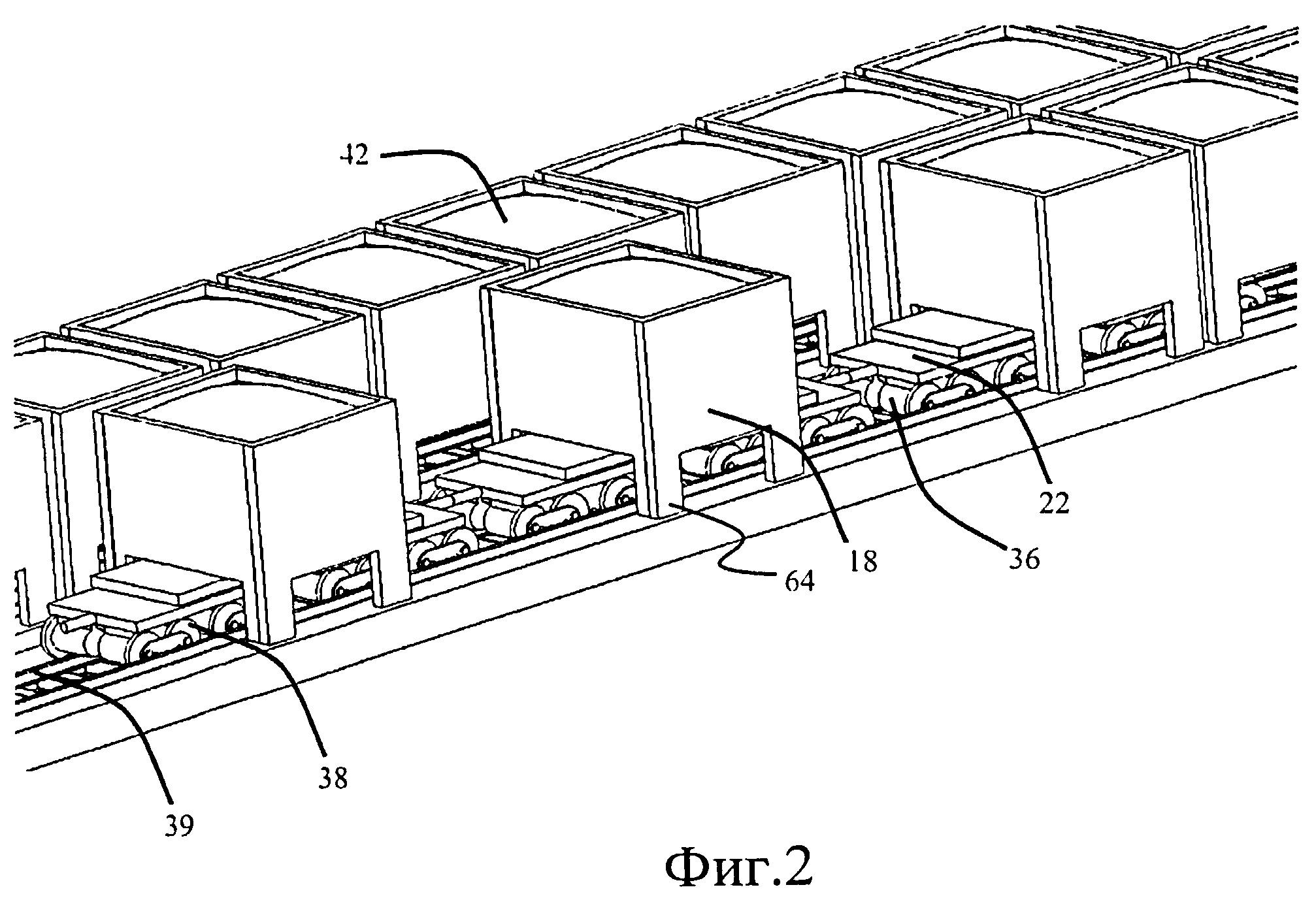
[13] на фиг.2 приведен вид в перспективе первого примера рабочих железнодорожных составов с множеством транспортных устройств и масс для аккумулирования, используемых в системе аккумулирования энергии, показанной на фиг.1;
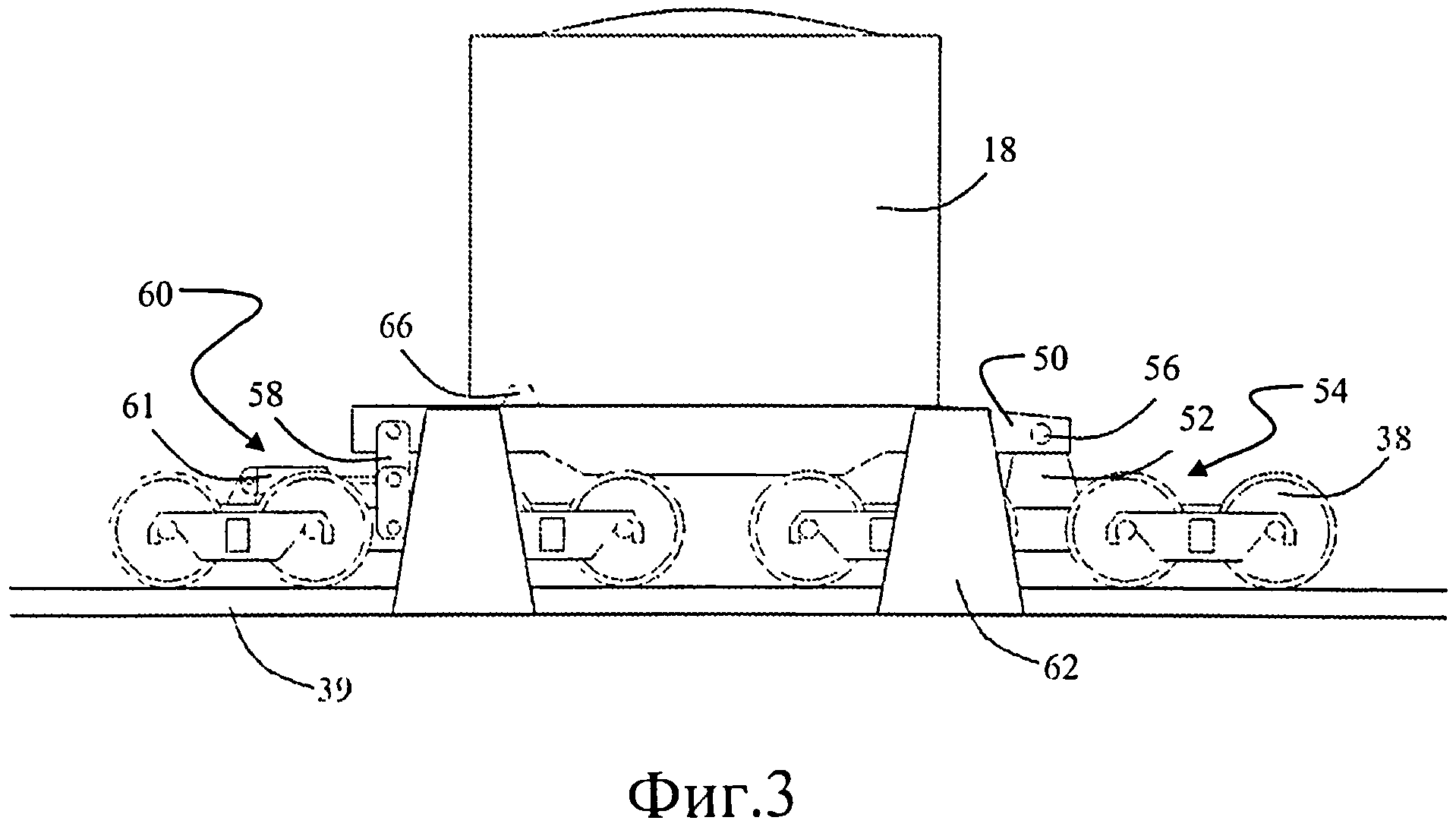
[14] на фиг.3 приведен вид сбоку одного транспортного устройства первого варианта, принявшего и поднявшего массу для транспортировки;
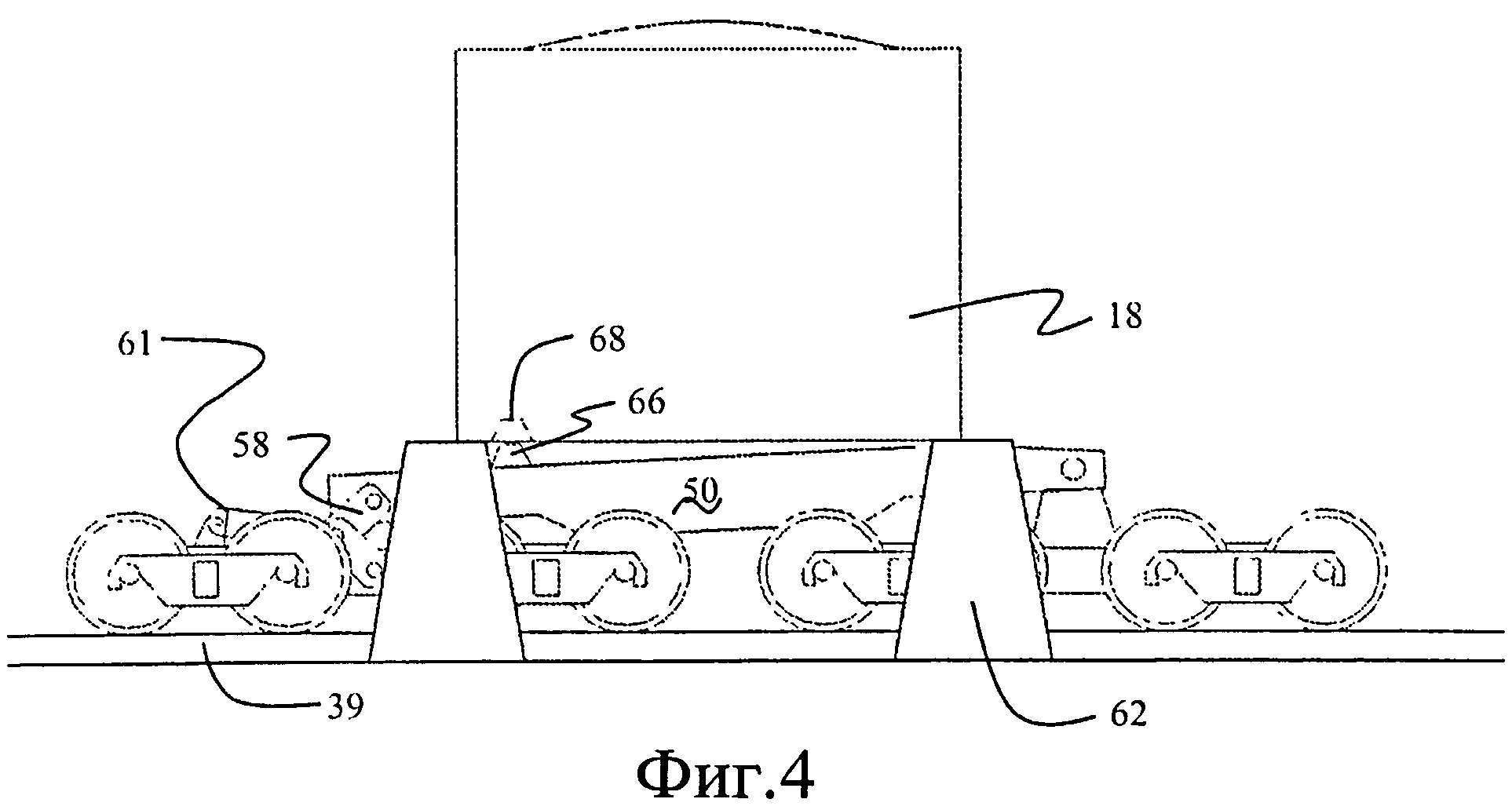
[15] на фиг.4 приведен вид сбоку транспортного устройства, представленного на фиг.3, в положении для приема массы для транспортировки;
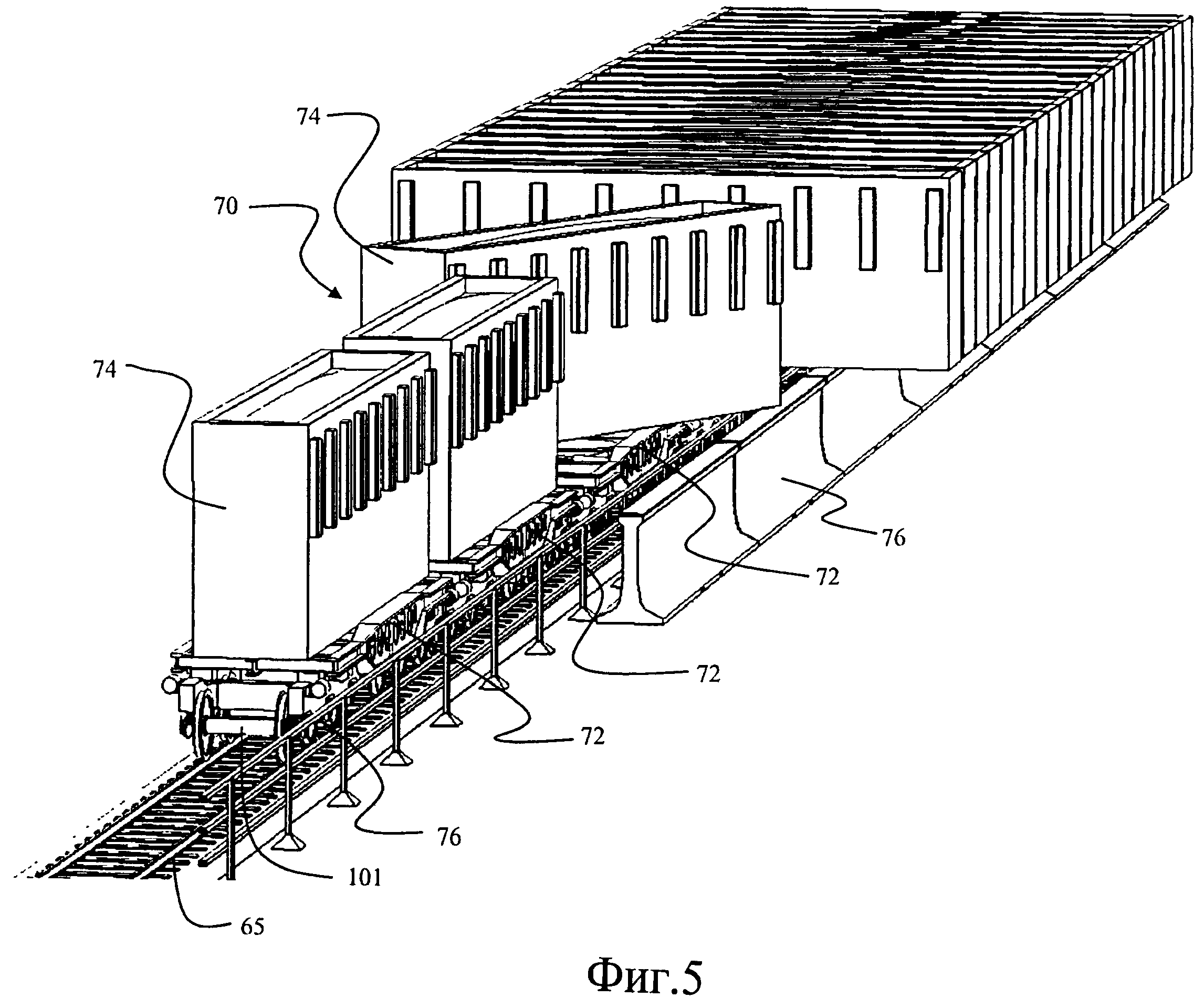
[16] на фиг.5 приведен вид в перспективе рабочих железнодорожных составов со вторым примером варианта транспортных устройств и масс для складирования;
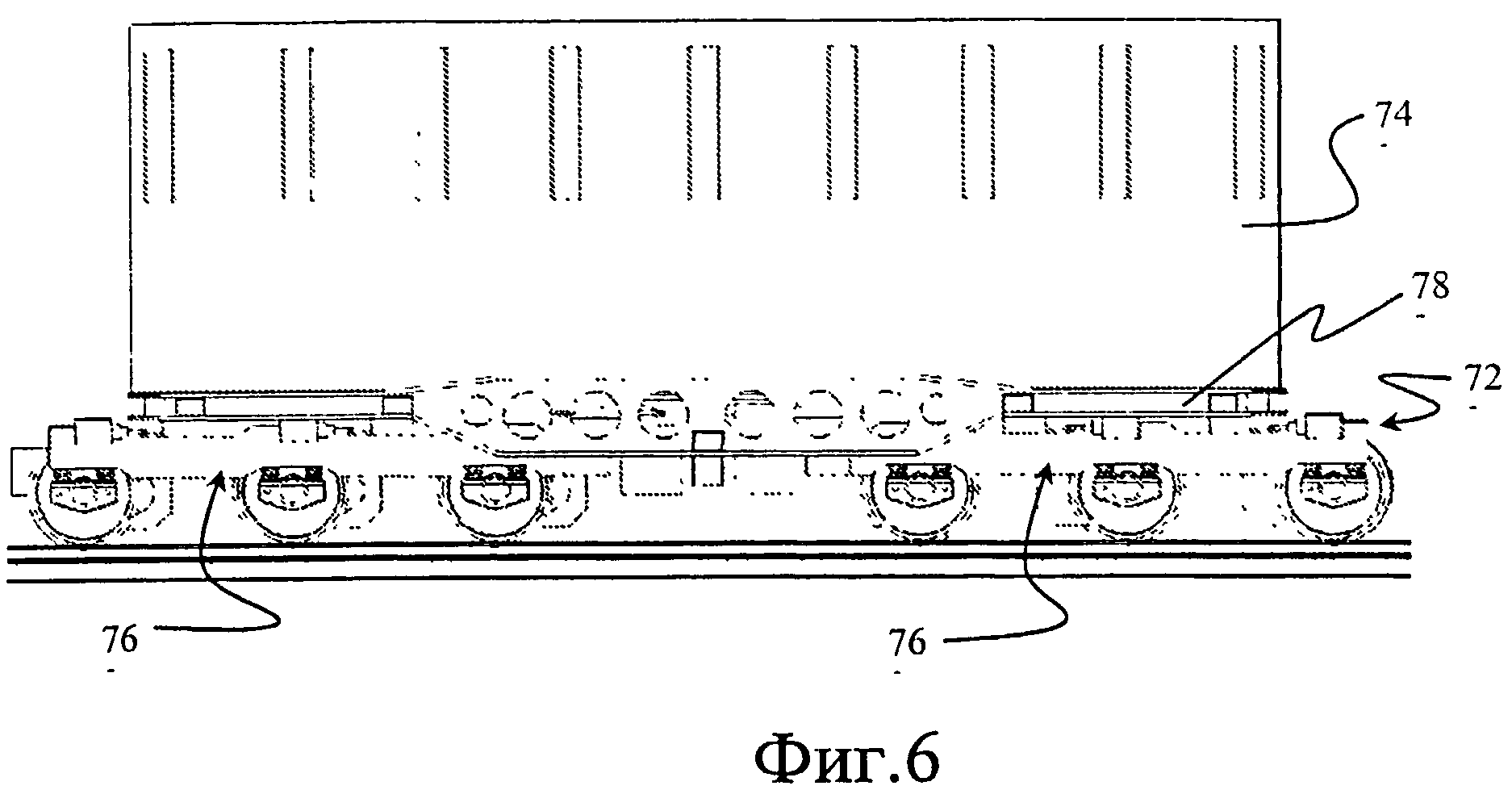
[17] на фиг.6 приведен вид сбоку одного транспортного устройства второго варианта осуществления изобретения с массой в транспортном положении;
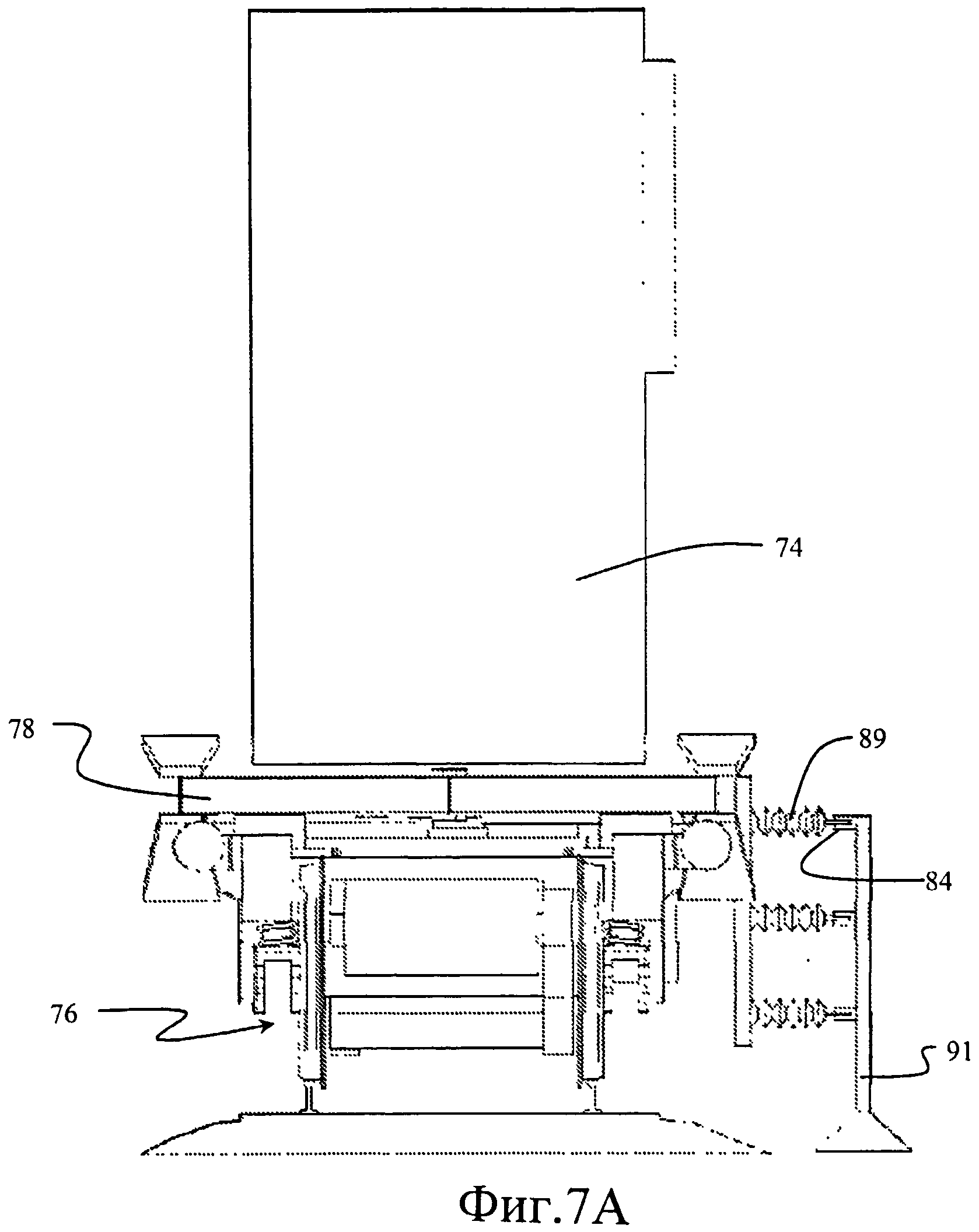
[18] на фиг.7А приведен вид сзади транспортного устройства, изображенного на фиг.6;
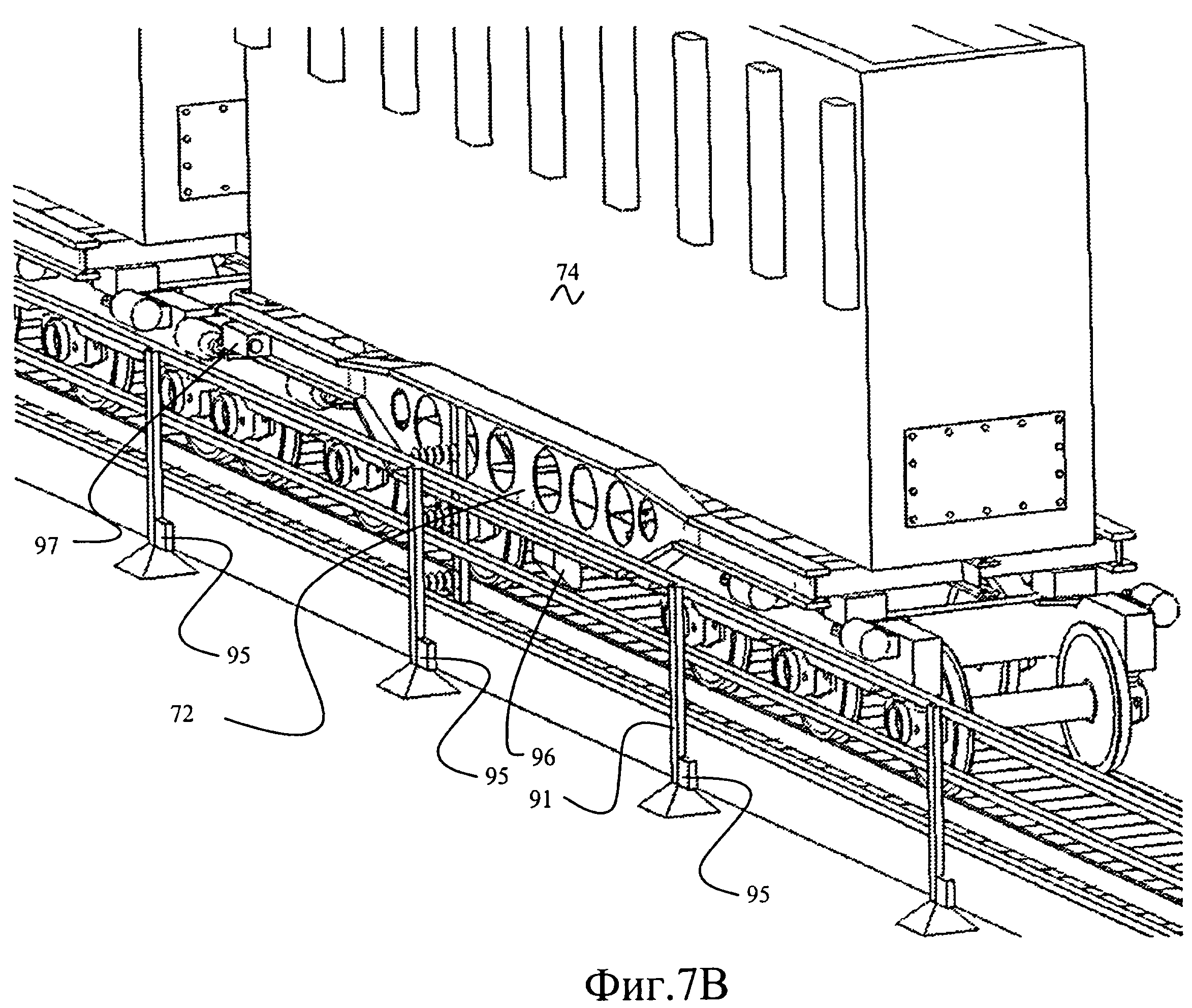
[19] на фиг.7В приведен частичный вид в перспективе сбоку транспортного устройства и путевых компонентов;
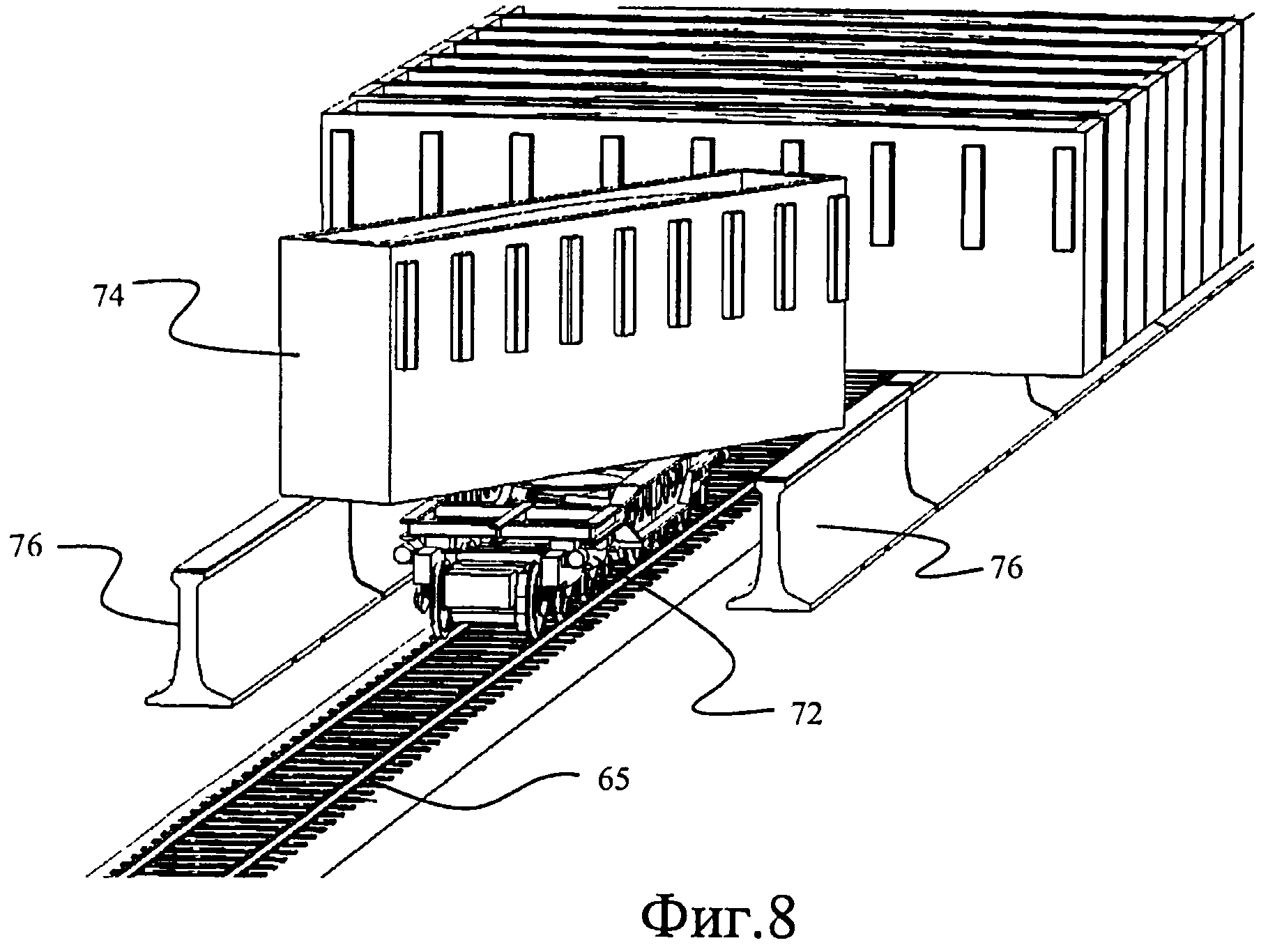
[20] на фиг.8 приведен вид в перспективе одного транспортного устройства второго варианта с массой в процессе поворота для складирования;
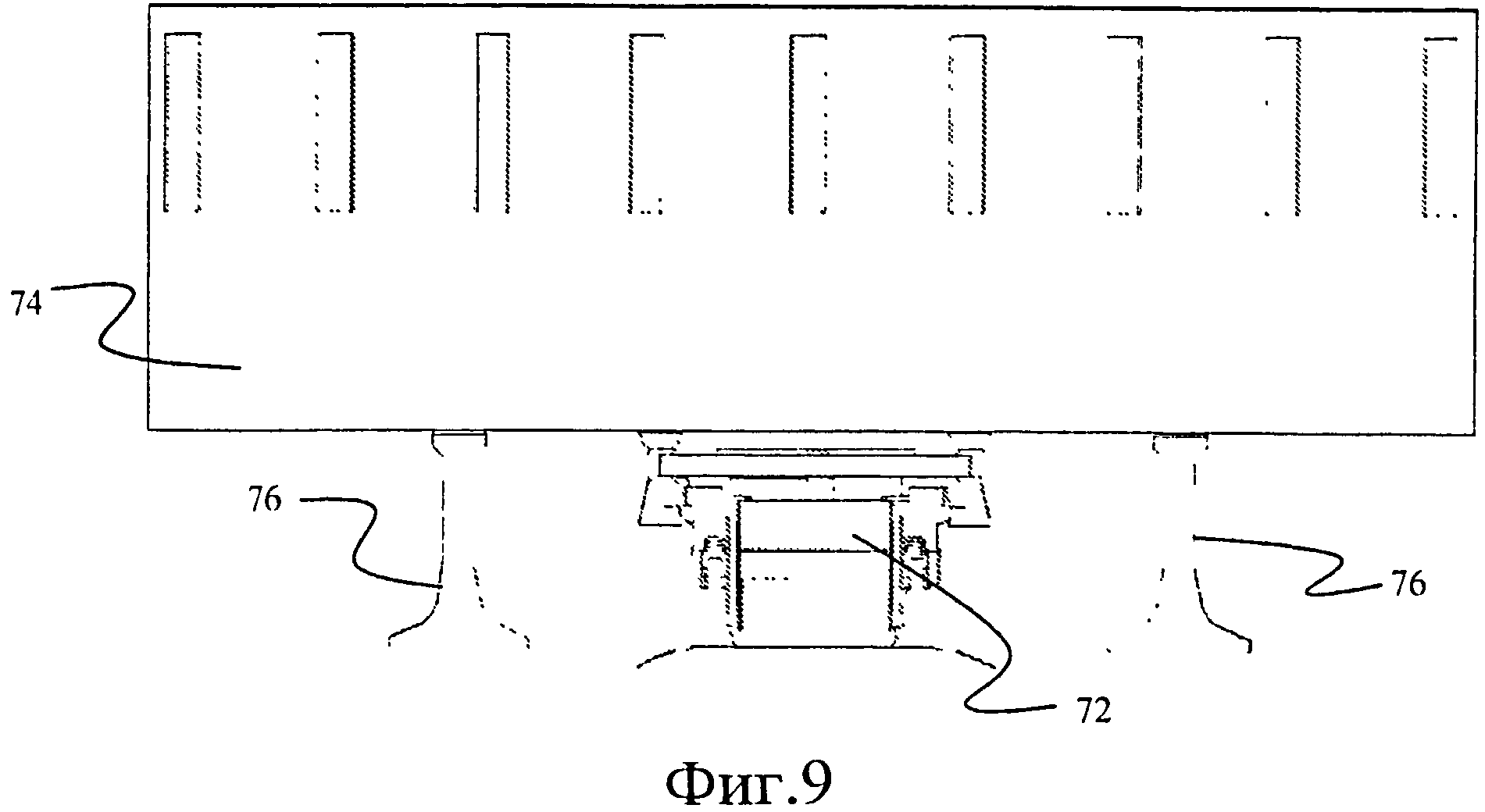
[21] на фиг.9 приведен вид с торца транспортной тележки второго варианта осуществления изобретения с массой, повернутой для складирования;
[22] на фиг.10А приведено детальное изометрическое изображение поворотной опорной системы для перемещения массы на транспортной тележке, изображенной на фиг.6;
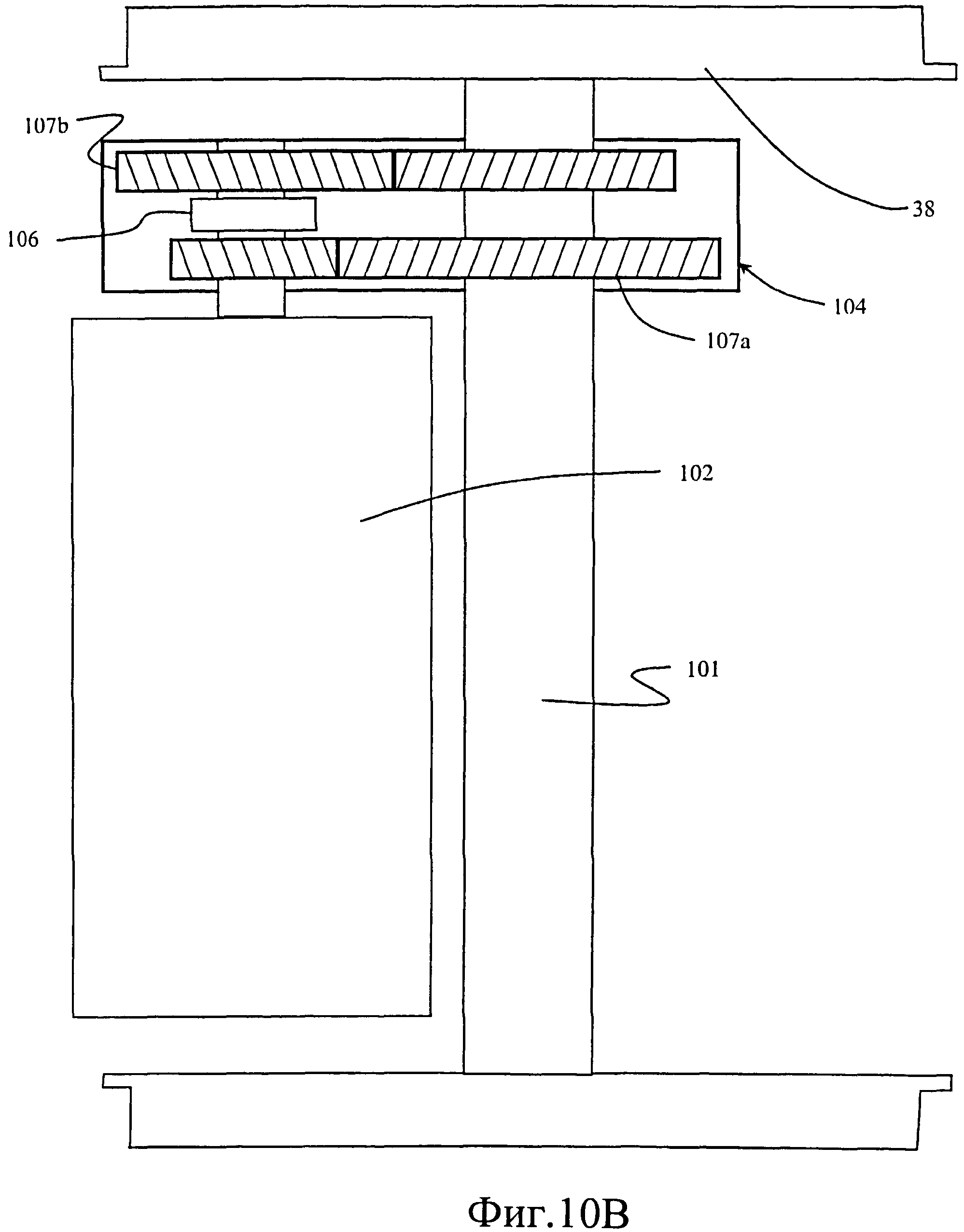
[23] на фиг.10В приведено поперечное сечение примера трансмиссии для применения с ведущими осями;
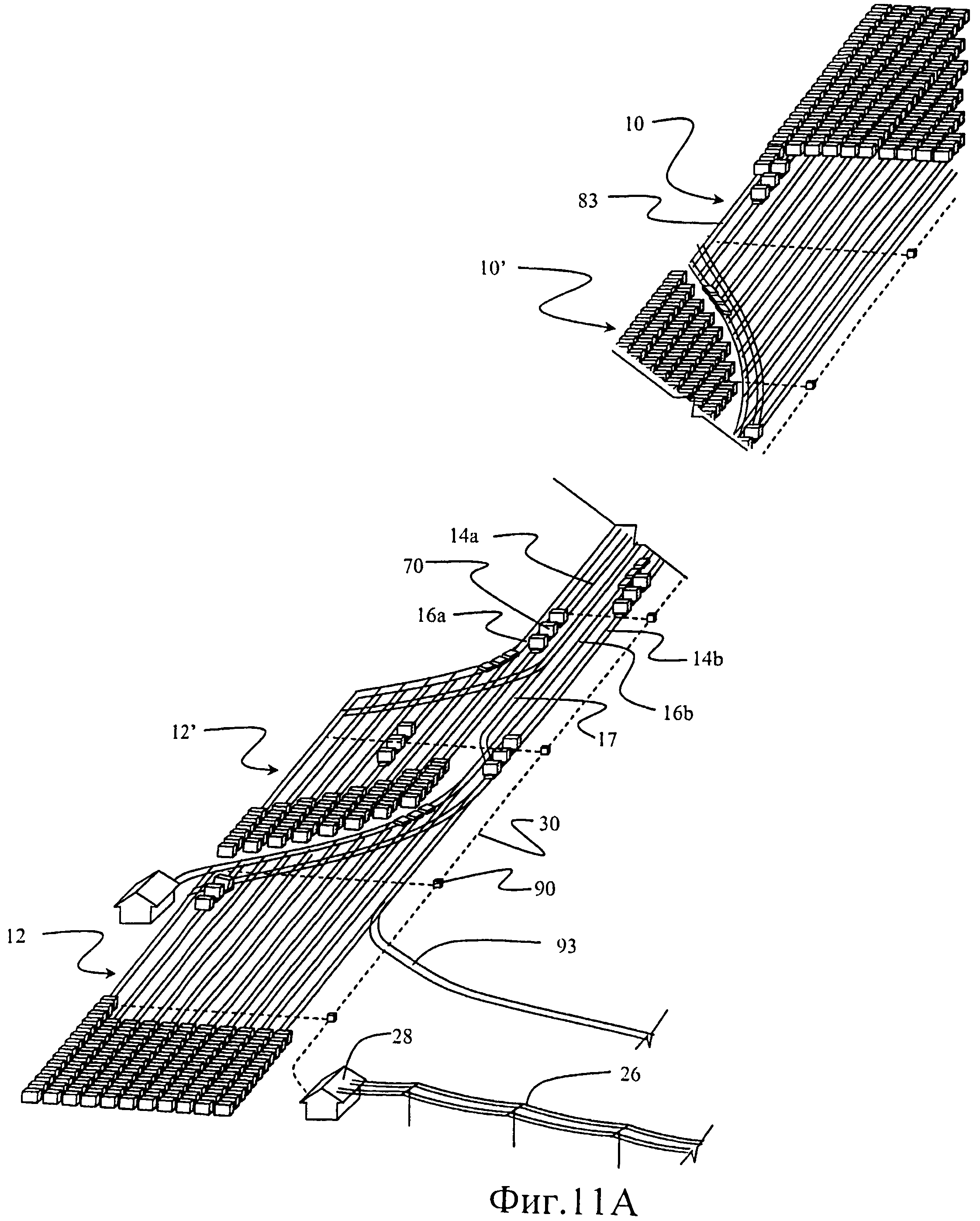
[24] на фиг.11А приведено наглядное изображение примера силовой и возвратной схемы с множеством путей, используемой в варианте осуществления системы аккумулирования энергии;
[25] на фиг.11В приведен пример плана верхнего складского двора для системы аккумулирования энергии;
[26] на фиг.11С приведен пример плана нижнего складского двора;
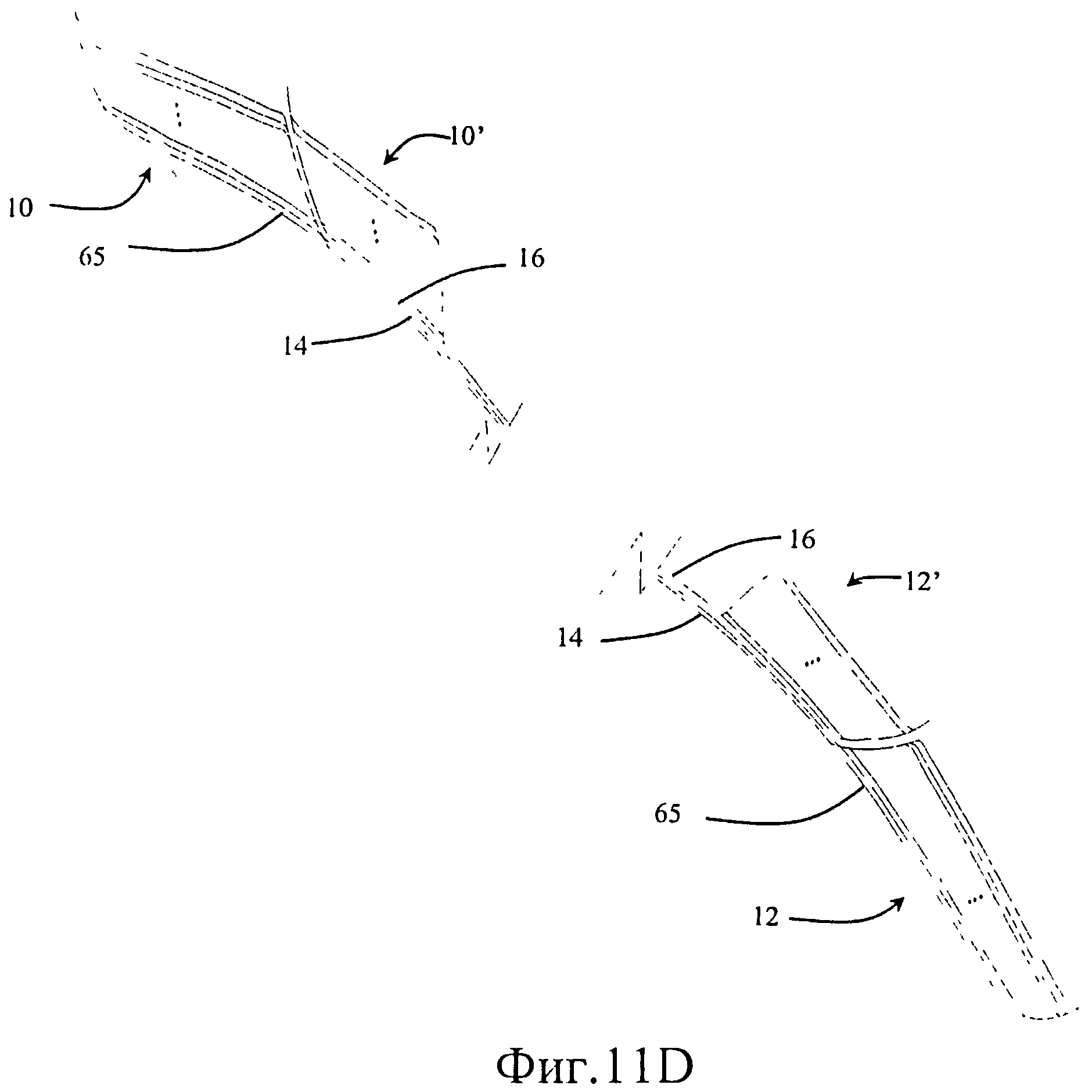
[27] на фиг.11D приведен пример плана дополнительного расширения верхнего и нижнего складских дворов;
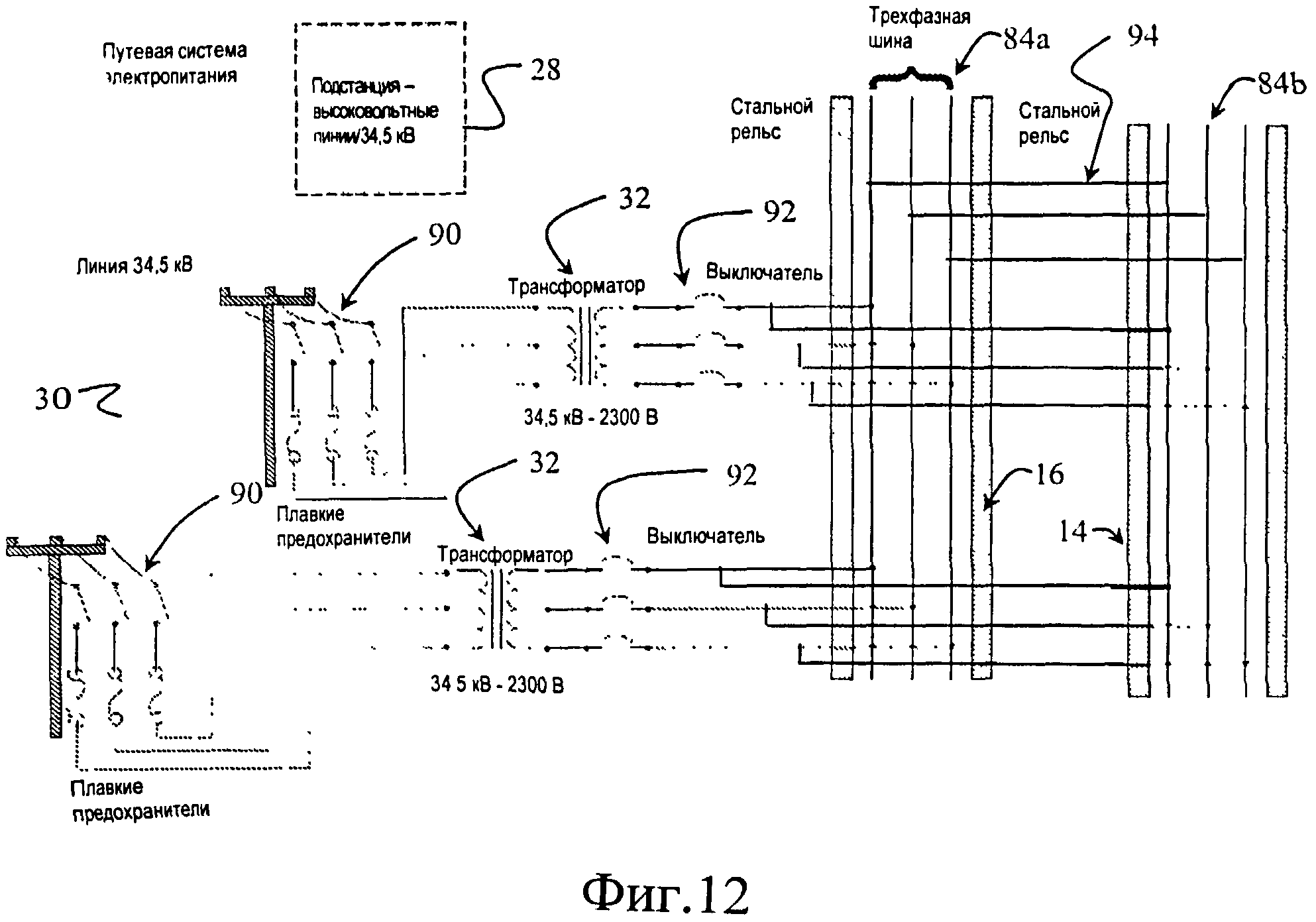
[28] на фиг.12 приведена путевая схема электропитания для варианта осуществления системы;
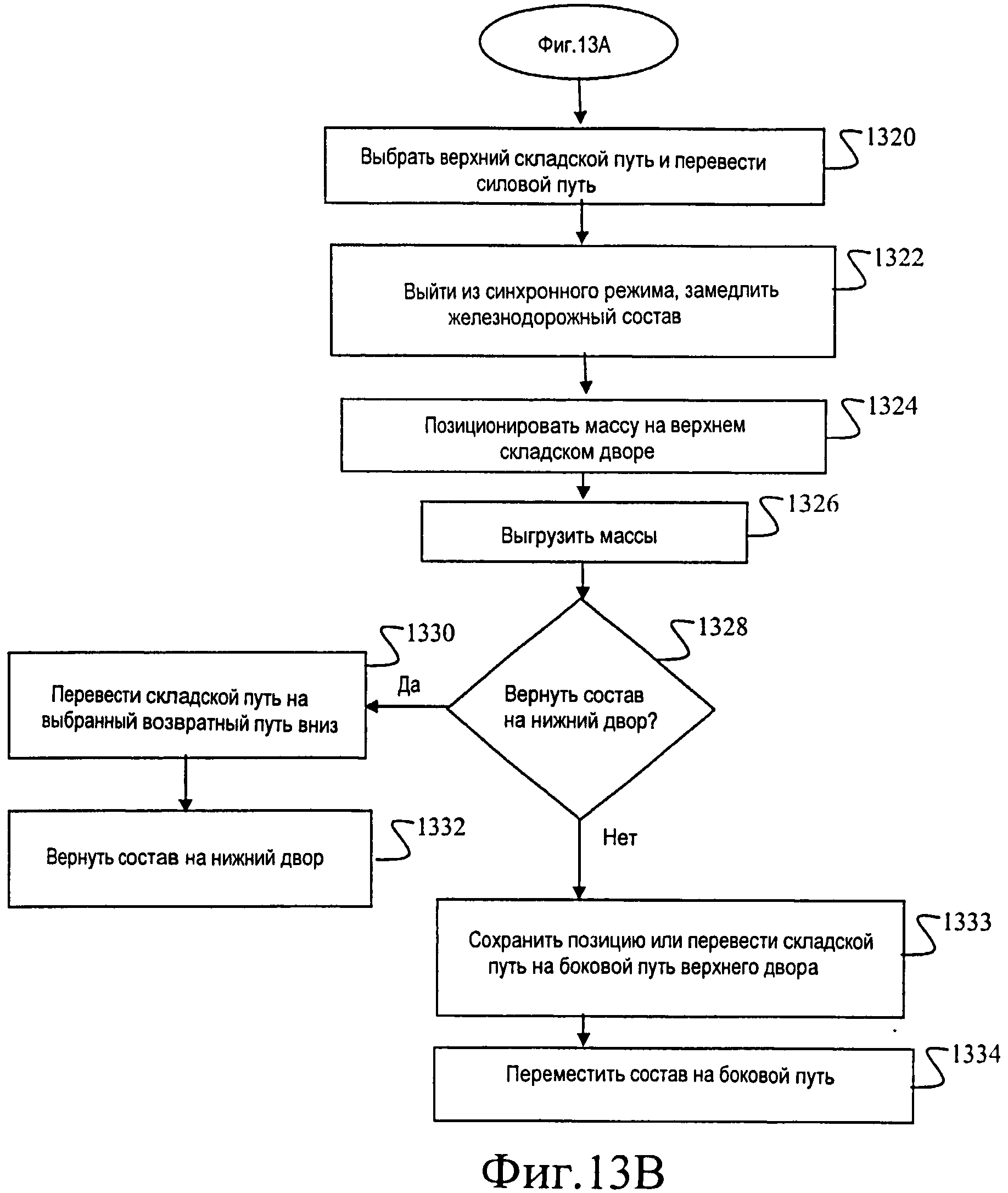
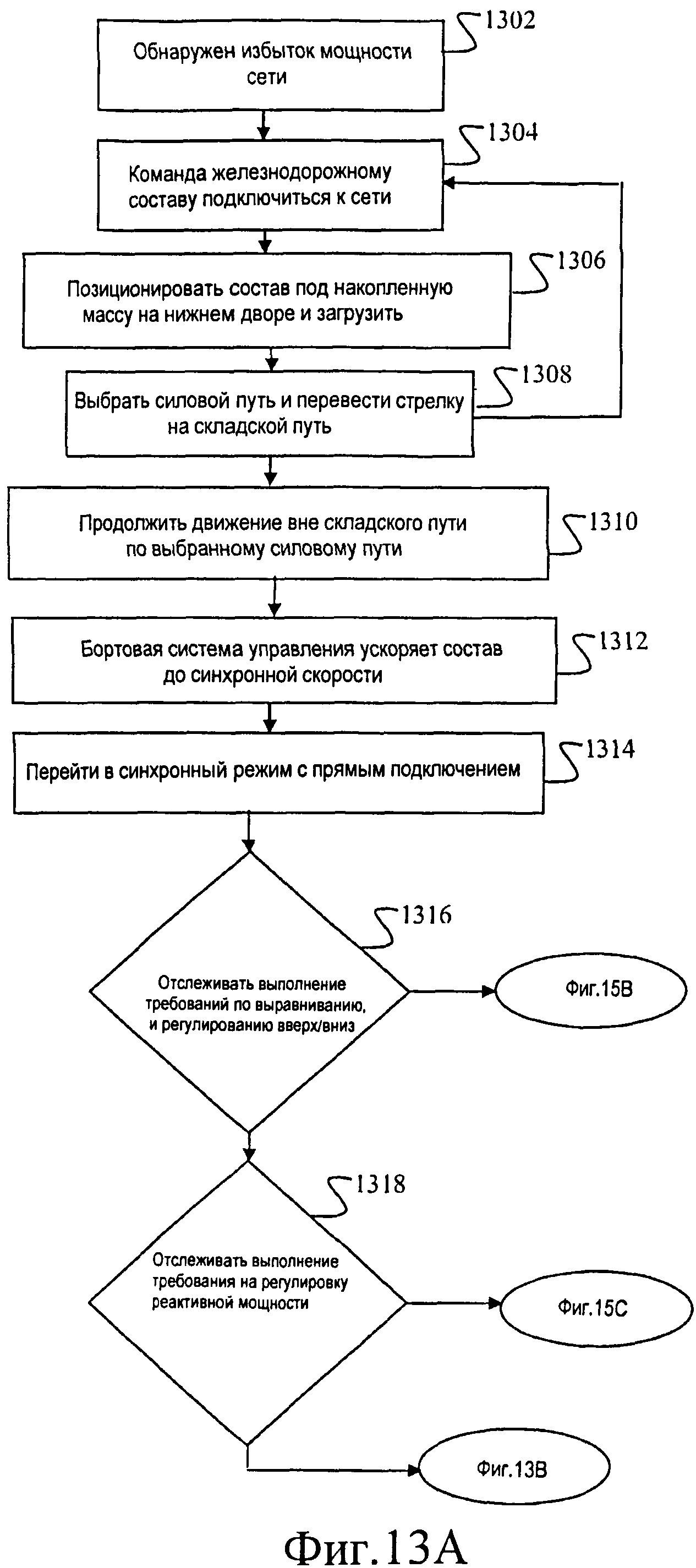
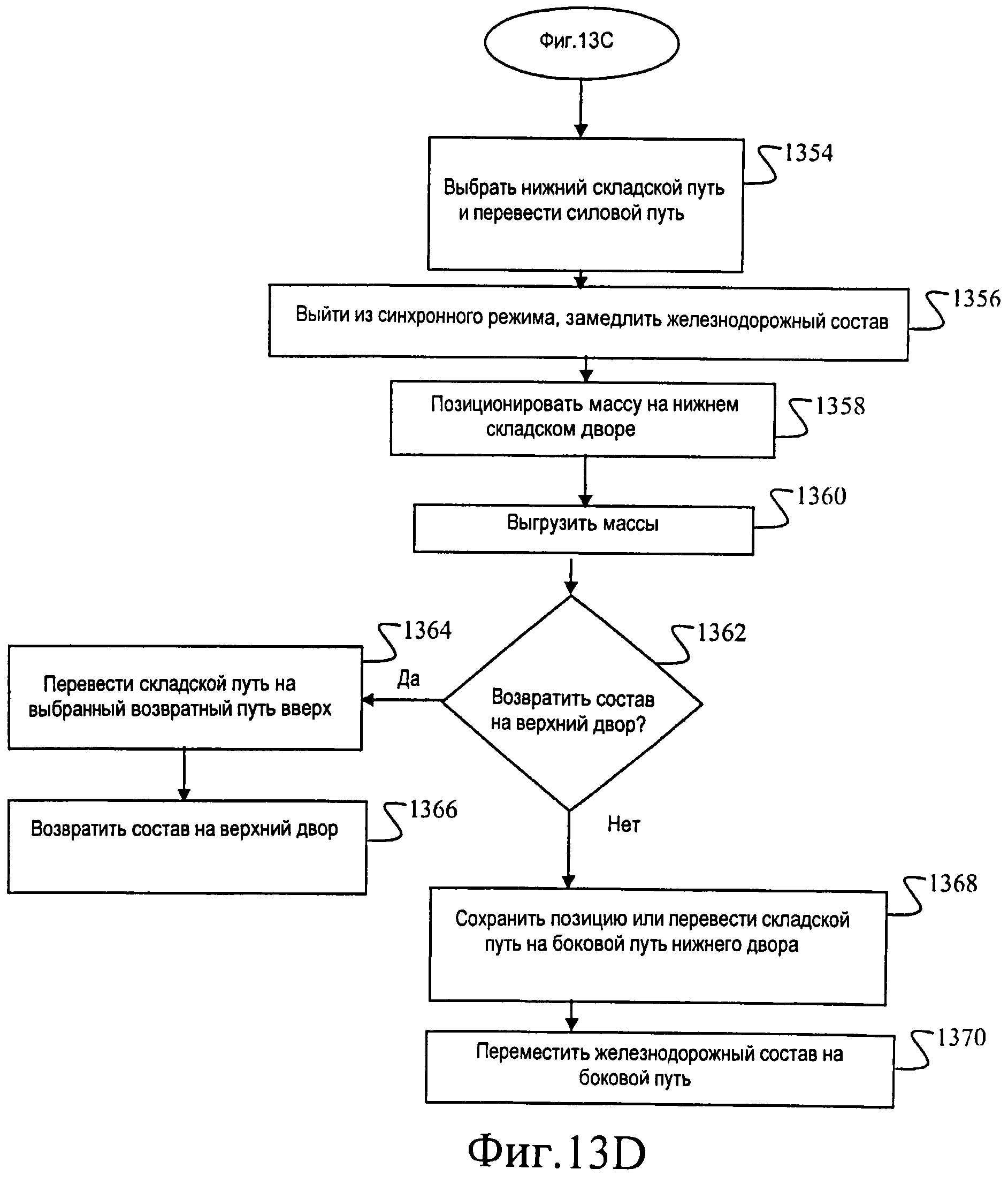
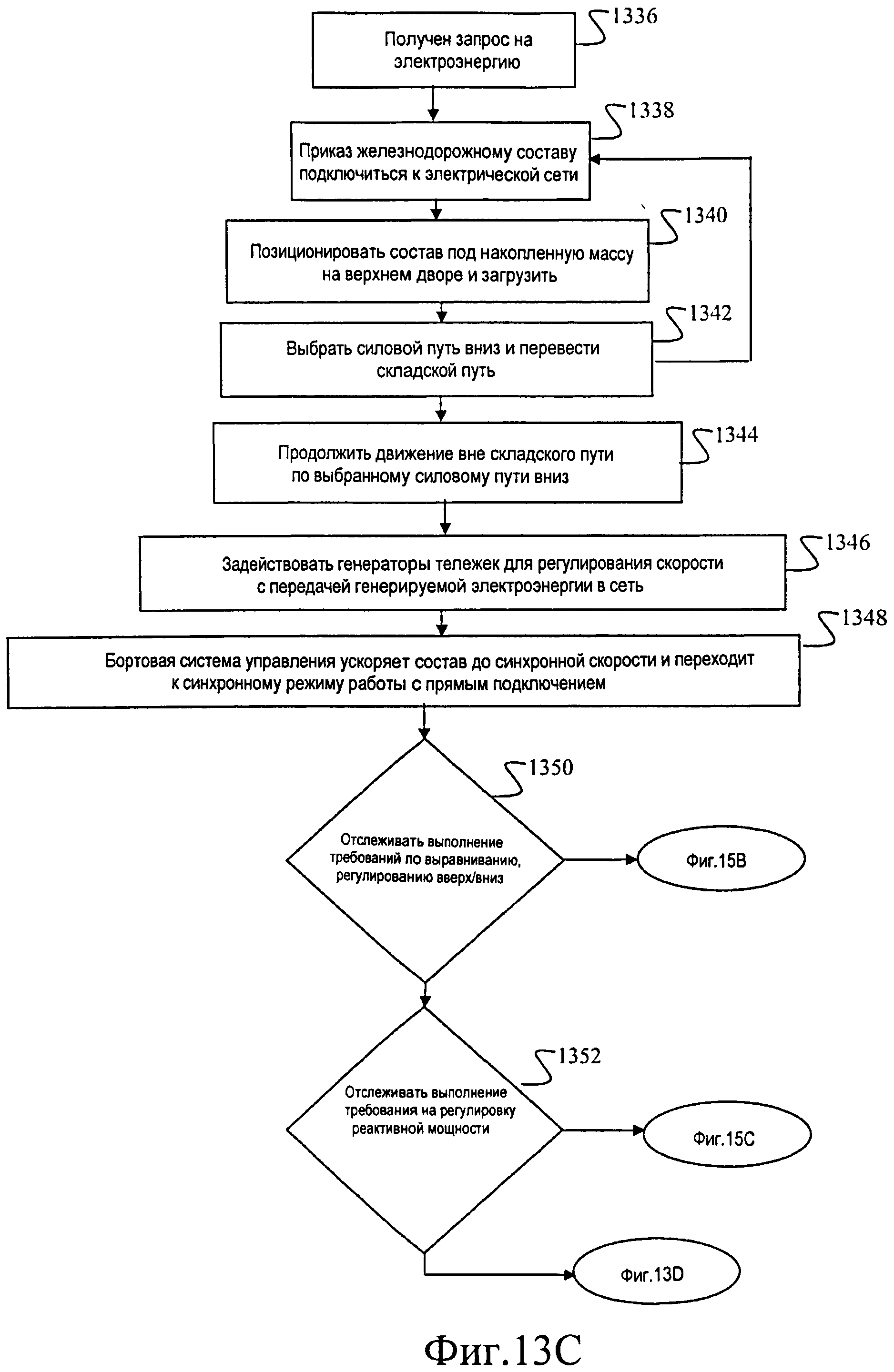
[29] на фиг.13А-D приведена блок-схема примера последовательности действий для описанных вариантов осуществления системы аккумулирования энергии;
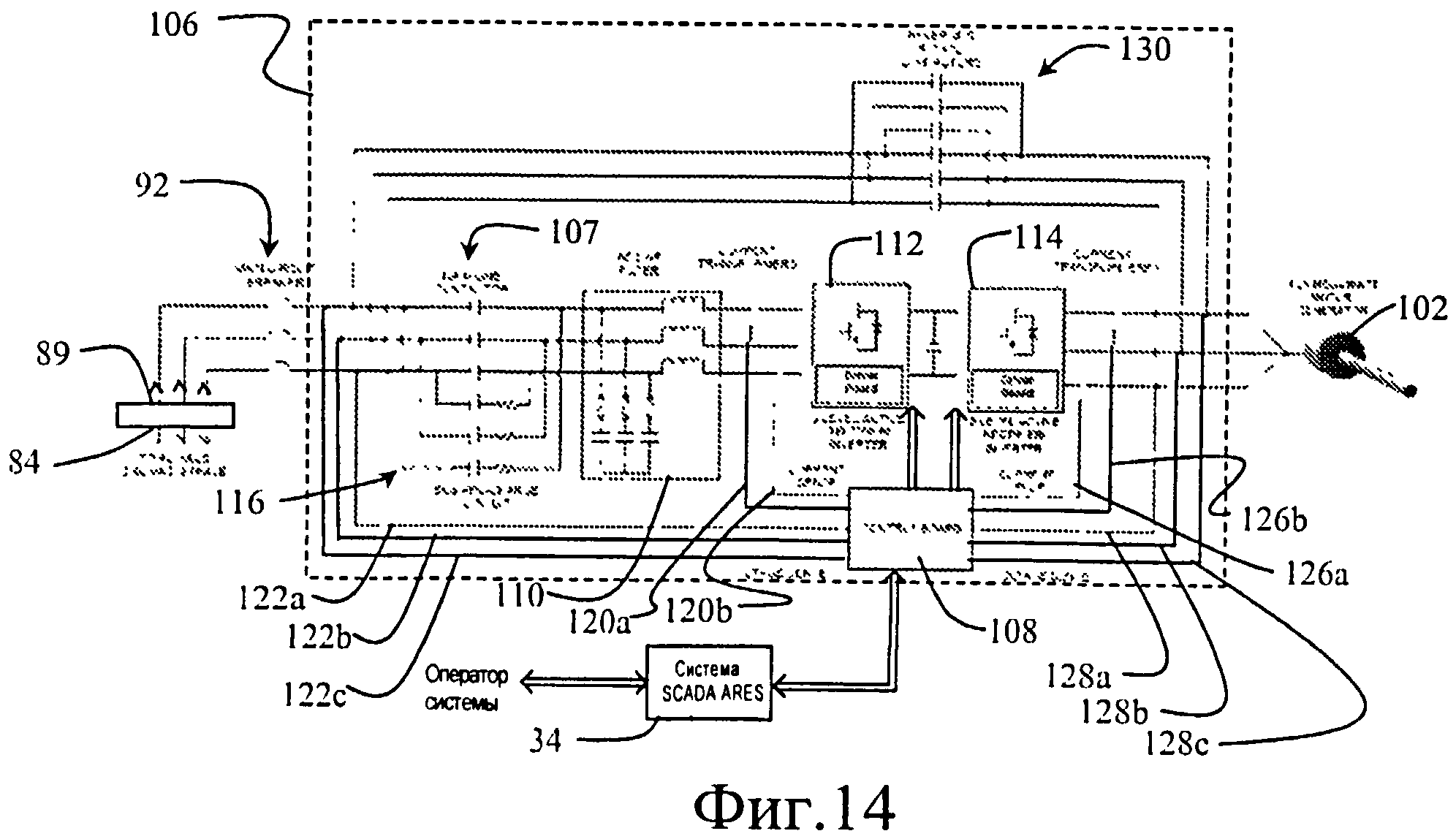
[30] на фиг.14 приведена электрическая схема транспортного устройства для варианта осуществления системы;
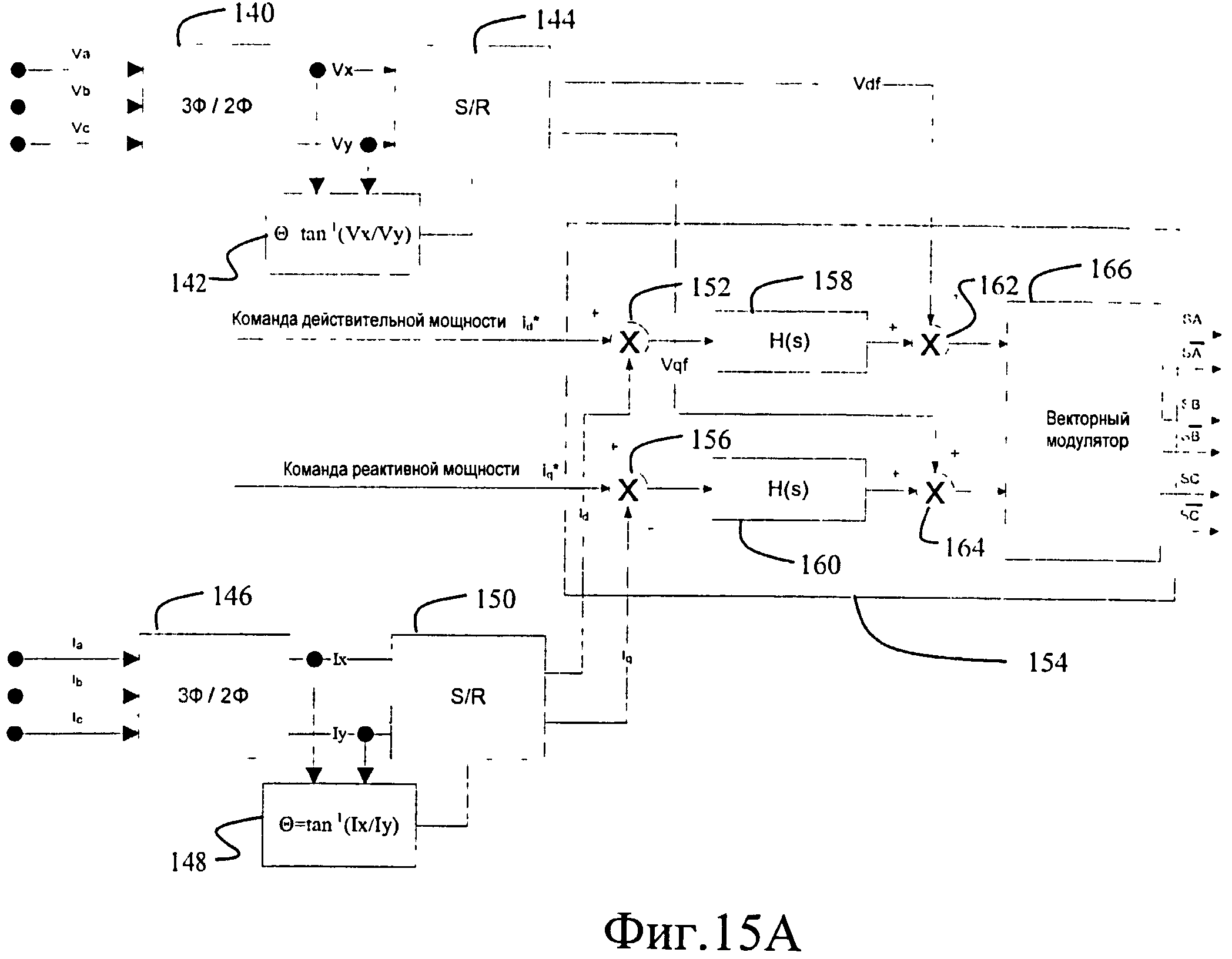
[31] на фиг.15А приведена технологическая карта рабочих характеристик для контроллера питания транспортного устройства;
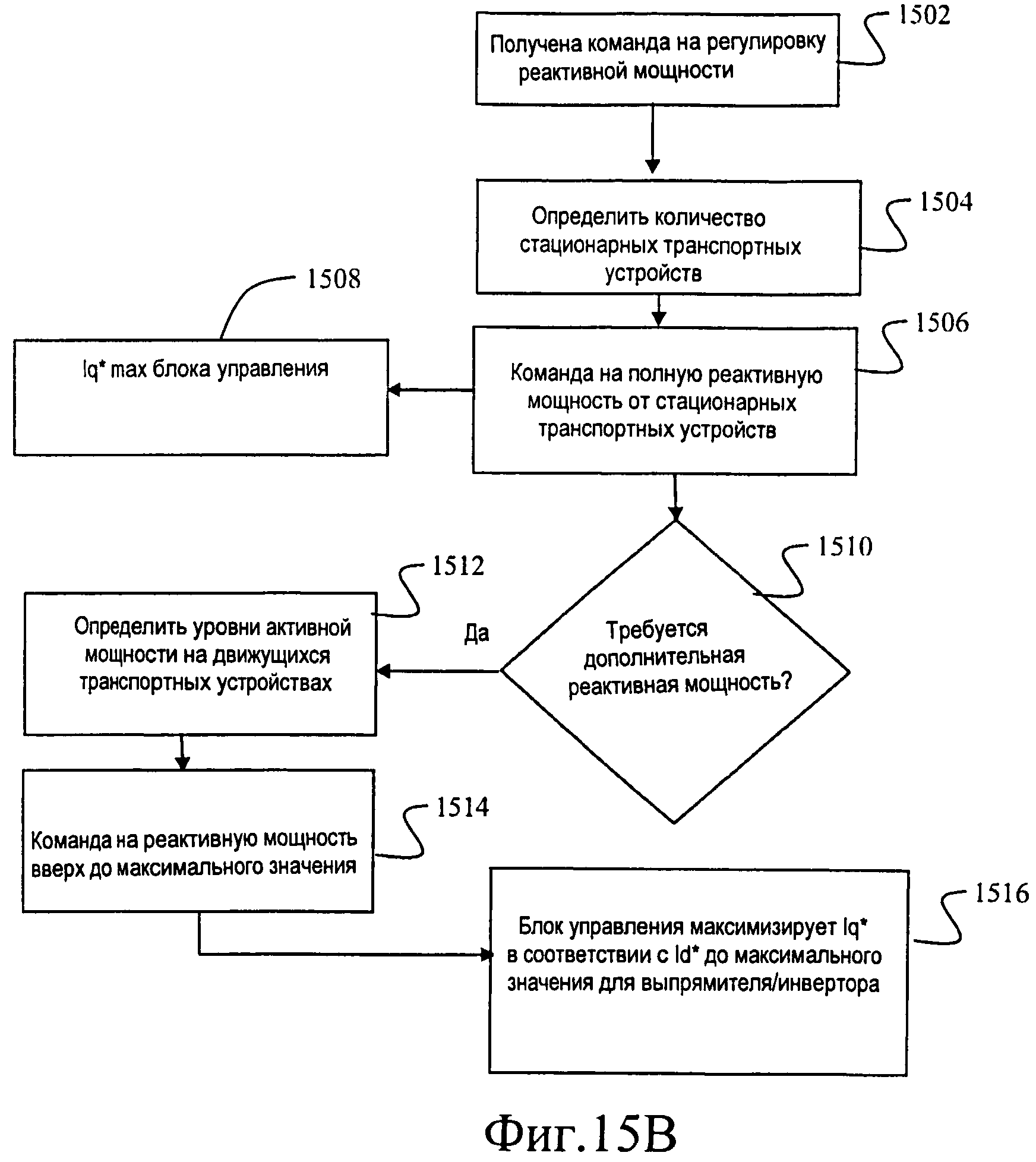
[32] на фиг.15 В приведена блок-схема примера операций для поддержки VAR в системе;
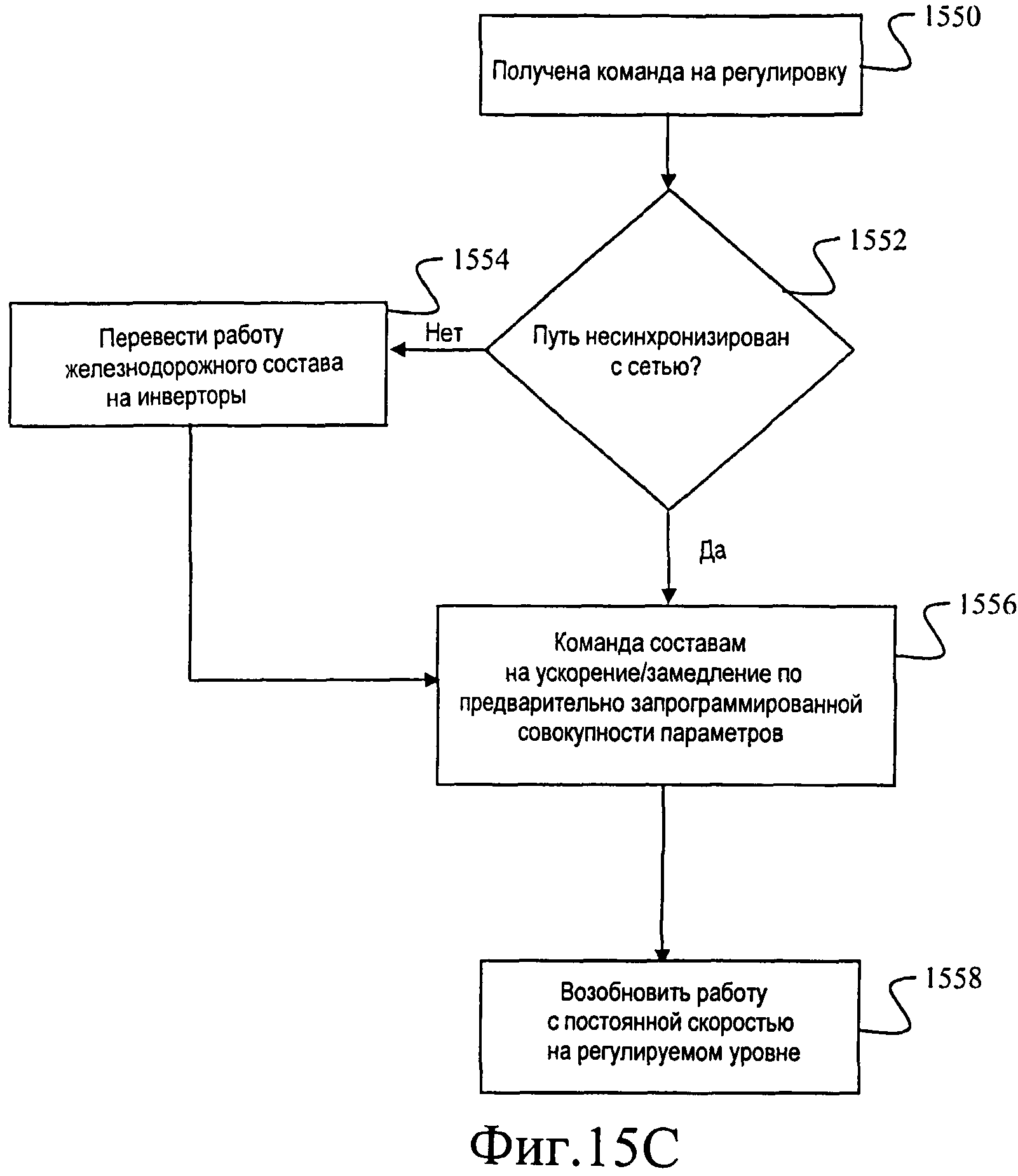
[33] на фиг.15С приведена блок-схема примера операций выравнивания для регулирования вверх или регулирования вниз в системе.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[34] Как видно из чертежей, приложенных для более детального описания различных вариантов осуществления изобретения, на фиг.1 представлен вариант усовершенствованной железнодорожной системы аккумулирования энергии (advanced rail energy storage, ARES), имеющей верхний складской двор 10, нижний складской двор 12 и соединительные пути 14 и 16. Несмотря на то что на фиг.1 показаны только единичные силовой и возвратный пути, может быть использовано множество путей в зависимости от требований системы, как будет описано более подробно в дальнейшем. Крупные массы 18 транспортируются между складскими дворами 10 и 12 с помощью железнодорожных составов 20 с электроприводом, которые составляют элементы поезда, состоящие из одного или более челночных транспортных устройств 22, в электрифицированной железнодорожной сети 24, созданной путями 14, 16, аккумулируя или выдавая энергию. Пустые транспортные устройства (обозначенные 22′) возвращаются по электрифицированной железнодорожной сети 24. Железнодорожная сеть включает множество групп соединительных путей, обеспечивающих двунаправленное движение загруженных и пустых транспортных устройств. В периоды аккумулирования или выдачи энергии непрерывный поток железнодорожных составов транспортных устройств с электроприводом перемещает массы между складскими дворами. Железнодорожная сеть подключена к местной электрической сети посредством проводов 26, подсоединенных к электрической подстанции 28 и распределенных через путевые электрические распределительные линии 30 переменного тока и трансформаторы 32, что обеспечивает энергетическую взаимосвязь с интервалами примерно 1060 футов (323 метра) с шинами питания или «третьими рельсами», что будет описано более подробно далее, которые содержат компонент материала с высокой проводимостью вдоль их длины, такого как алюминий или медь, для предотвращения омических потерь в процессе передачи электроэнергии. Железнодорожная сеть может содержать элементы 35 для хранения и ремонта транспортных устройств.
[35] Выбранное количество транспортных устройств 22 в каждом железнодорожном составе 20 имеют электрический привод, как электрифицированные толкатели или тихоходы, и управляются автоматизированной системой 34 управления, как будет описано более подробно далее. Каждый электрифицированный толкатель использует ходовые тележки, сопоставимые с тележками, используемыми в современных дизель-электрических локомотивах, которые используют реверсивные электрические двигатели-генераторы в качестве тяговых двигателей для перемещения масс из нижнего складского двора на верхний складской двор и в качестве генераторов для динамического торможения при перемещении масс из верхнего складского двора на нижний складской двор. В таком применении электрические двигатели-генераторы, которые приводят в движение колеса, аккумулируют потенциальную энергию в процессе подъема масс при движении вверх в режиме двигателя и высвобождают энергию посредством генерации в режиме динамического торможения при спуске масс во время движении вниз. В примерах осуществления изобретения, описанных в настоящей заявке, в качестве транспортных устройств используют стандартные железнодорожные тележки, такие как 3-осные радиальные тележки, изготовленные компанией «Electro-Motive Diesel, Inc.», как описано в заявке на патент США 2010/0011984 А1, опубликованной 21 января 2010 г. под названием «Радиальная тележка с автоматическим управлением» (Self-Steering Radial Bogie). Каждая тележка имеет множество колес для взаимодействия со стальными рельсами железнодорожной сети с системой ARES и общепринятую ширину колеи для совместимости с традиционными железнодорожными линиями.
[36] Варианты осуществления изобретения, изображенные на фиг.1 и фиг.2, показывают транспортные устройства 22 с тележками 36, каждая из которых имеет множество колес 38, движущихся по рельсам 39 железнодорожной сети. Каждое транспортное устройство содержит опорную структуру, описанную более подробно далее, для перевозки масс 18, которые могут состоять из бетона (такого как железобетон и/или бетон с последующим напряжением, или тяжелый железобетон и/или тяжелый бетон с последующим напряжением, полученные из руды, такой как таконит) или любого другого достаточно твердого и прочного материала, такого как высокопрочная пластмасса, металл, дерево и подобного. Массы могут быть цельными, изготовленными из базового материала, такого как железобетон, или пустотелыми и заполненными грузом 42, таким как грунт, камень, вода, смоченный песок, смоченный гравий, смоченный базальт, железная руда или любой другой достаточно плотный материал, предпочтительно полученный в ходе экскавации на месте эксплуатации. В примере осуществления изобретения каждая масса является железобетонным контейнером, изготовленным из сборных напряженно армированных бетонных панелей с последующим напряжением или сборных железобетонных панелей, имеющих внешние размеры 17′ (5 метров) в высоту на 17′ (5 метров) в ширину на 19,5′ (6 метров) в длину. Боковые стены и основание масс имеют толщину 18′′ (46 сантиметров), что дает общий объем 5636 кубических футов (150 кубических метров). С грузом плотностью примерно 150 фунт на фут в кубе (2430 кг/м3) и подобной плотностью материалов контейнера общий вес каждой массы может достичь 424 тонн. Каждая масса может быть снабжена системой труб, чтобы иметь возможность разжижать водой или нагнетанием воздуха находящийся в контейнере материал, что позволяет легко удалять или заменять наслоения содержимого в случае необходимости для корректировки веса массы или центра тяжести или в случае, если желательно произвести смачивание аккумулирующей среды для регулирования плотности массы.
[37] Транспортные устройства 22 являются низкопрофильными, поэтому они могут проходить под загруженными массами, которые хранятся на верхнем и нижнем складских дворах в подвешенном состоянии над складскими путями, что будет более подробно описано в дальнейшем. Как показано на фиг.3 и фиг.4, механизм переноса для складирования первого варианта осуществления изобретения включает рычажное основание 50, которое первым концом крепится к стойке 52, выступающей из первой тележки 54 транспортного устройства 22, с помощью оси 56 вращения. Складной шарнир 58 прикрепляет рычажное основание непосредственно у его второго конца ко второй тележке 60 транспортного устройства. В сложенном положении рычажного основания 50, показанном на фиг.4, транспортное устройство 22 может свободно катиться под массой 18. Выдвижной складной шарнир 58 с гидроцилиндром 61 для подъема рычажного основания 50, как показано на фиг.3, поднимает массы с их неподвижных опор 62, показанных на фиг.3 или фиг.4, или вместе с неотъемлемыми ногами-опорами 64, как показано на фиг.2. Эта операция повторяется в обратном порядке на верхнем и нижнем складских дворах для погрузки и выгрузки масс. В показанном варианте рычажное основание имеет дугообразную форму, что обеспечивает зазор у первого конца в месте монтажа оси/стойки в нижнем положении. Предварительное напряжение балочной конструкции рычажного основания с соответствующим выпрямлением рычажного основания из-за прилагаемого усилия при подъеме массы обеспечивает необходимую дугообразную форму в ненагруженном сложенном состоянии. Шип 66 зацепления на рычажном основании входит в стыковочный паз 68 в массе 18 для закрепления массы при движении рычажного основания при выдвижении складного шарнира.
[38] В варианте осуществления изобретения, изображенном на фиг.3 и фиг.4, опоры 62 располагаются с возможностью поддержки четырех прямоугольных масс, каждая из которых опирается в одном углу на соответствующую опору. В других вариантах могут использоваться К-образные направляющие или подобные выступающие вверх опорные элементы, что снижает требования к допускам на совмещение. В варианте с собственными ногами-опорами, показанном на фиг.2, наличие опор для масс на уровне земли обеспечивает доступ к рельсам 39 складских путей 65 на складских дворах для технического обслуживания. Подобным образом, использование К-образных направляющих, подвижных опорных столбов или аналогичных подвижных опорных конструкций обеспечивает доступ для технического обслуживания.
[39] Наличие транспортных устройств, способных катиться под массами, делает возможным загружать и выгружать индивидуальные массы последовательно и точно на складских дворах. Это позволяет системе ARES парковать индивидуальные массы очень близко друг к другу на складских дворах, что значительно уменьшает длину электрифицированной железнодорожной системы, необходимой для целей хранения. Данная особенность также позволяет получать больше пространства для индивидуальных масс на борту электрических транспортных устройств, тем самым обеспечивая возможность применения множества колесных тележек для перемещения массы, то есть создается возможность суммарной транспортировки более тяжелых масс, что требует меньше складского пути. В таком случае значительно улучшаются плотность хранения масс для аккумулирования энергии и рентабельность общей системы.
[40] Во втором варианте осуществления изобретения для железнодорожных составов применяются транспортные устройства и перевозимые массы, показанные на фиг.5. В данном варианте каждый железнодорожный состав 70 включает в себя четыре транспортных устройства 72. В данном примере осуществления изобретения два транспортных устройства в железнодорожном составе являются толкателями с тяговыми электродвигателями, что будет более подробно описано далее, и два транспортных устройства не имеют двигателей. Массы 74 в горизонтальном разрезе имеют прямоугольную форму, позволяющую отливочной форме основания массы по периферии опираться на конструкцию транспортного устройства, что будет более подробно описано далее. Как показано на фиг.6 и фиг.7А, каждая масса 74 при перевозке располагается в продольном направлении на транспортном устройстве 72 для транспортировки в пределах железнодорожной сети. Каждое транспортное устройство в показанном варианте использует две 3-осные радиальные тележки, несущие опорную структуру 78. Это обеспечивает допустимую нагрузку примерно 50 тонн на ось. Каждое транспортное устройство содержит механизм переноса для складирования, описанный более подробно далее, который позволяет производить подъем массы 74 и ее поворот в поперечное или повернутое положение, как показано на фиг.8. При полном повороте, как показано на фиг.9, масса располагается перпендикулярно складскому пути 65 и опускается с помощью механизма переноса для складирования на опорах или опорных направляющих 76. Как описано в отношении предыдущего варианта осуществления изобретения, подвижные К-образные направляющие, используемые в качестве опорных направляющих для складирования масс, обеспечивают свободный доступ к складским путям для беспрепятственного обслуживания. К-образные направляющие обычно используются в качестве дорожных барьеров. Для изображенных вариантов осуществления изобретения в разрезе К-образные направляющие имеют в ширину примерно 6′ (1,8 метра) у основания с уменьшением ширины на вершине до 2′ (0,6 метра). Верхняя поверхность каждой опорной направляющей имеет покрытие из армированной резины. Опорные направляющие вкапываются в полосе отчуждения в щебеночный балласт из первичной породы.
[41] Как и в случае с первым вариантом осуществления изобретения, потенциальная энергия в примере осуществления описанной выше крупномасштабной системы ARES аккумулируется примерно в 14000 массах, каждая из которых составляет примерно 240 тонн и является железобетонным контейнером, изготовленным из сборных напряженно армированных бетонных панелей с последующим напряжением или сборных железобетонных панелей, имеющих внешние размеры: 13′ (3,9 метра) в высоту, на 39′ (11,9 метра) в ширину, на 6,6′′ (2 метра) в длину (пути). Боковые стены и основание масс имеют толщину 18" (0,45 метра), что дает общий объем массы 3350 кубических футов (20 куб. метров). Емкость каждой массы будет заполнена скальной породой, такой как базальт, напластованный в песке, предпочтительно полученный в ходе экскавации на месте эксплуатации, в зависимости от конкретных местоположений данная смесь материалов даст вес примерно 143 фунта (65 кг) на квадратный фут (0,09 м2). Вес бетонной контейнерной конструкции также составляет примерно 143 фунта на квадратный фут (1590 кг/м2). Массы хранятся перпендикулярно складским путям на подвижных железобетонных опорных направляющих, которые идут параллельно путям на складском дворе, что минимизирует требования к пространству и облегчая быструю погрузку на транспортные устройства, как описано выше. Каждая масса может быть снабжена системой труб, чтобы иметь возможность разжижать водой или нагнетанием воздуха находящийся в контейнере материал, что позволяет легко удалять или заменять наслоения содержимого в случае необходимости для корректировки веса массы или центра тяжести или в случае, если желательно произвести смачивание аккумулирующей среды для регулирования плотности массы. В другом варианте массы составляются из взаимосвязанных слоев материала, что дает возможность с помощью крана снимать или перемещать массы по слоям или секциям. Хорошо выраженная прямоугольная форма данных масс, позволяющая накапливать их перпендикулярно над складскими путями, существенно сокращает длину складских путей, необходимых для системы ARES заданной мощности, а после загрузки и в процессе движения способствует значительному уменьшению полярного момента инерции транспортных устройств, повышая надежность и сокращая износ колес. Прямоугольные массы второго варианта осуществления изобретения могут быть выполнены с размерами, соответствующими размерам AREMA (American Railway Engineering and Maintenance-of-Way Association, Американская ассоциация по строительству и обслуживанию железных дорог) для ограниченных грузовых перевозок с взаимозаменяемостью, обеспечивающих поставку по железной дороге пустых контейнеров для масс для использования на предприятиях ARES.
[42] На фиг.5, а также фиг.10А каждое транспортное устройство 72 в железнодорожном составе 70 из четырех транспортных устройств оборудуется механизмом переноса, в котором используется множество гидроцилиндров 80, приводимых в действие соленоидным сервоклапаном или другим известным устройством управления и получающих питание от гидронасоса 82, находящегося на железнодорожном составе. Гидронасос получает питание от третьего рельса. Механизм переноса также содержит гидравлический подъемник 86, включающий поворотный принимающий стол 87, на котором располагаются массы и который расположен посередине транспортного устройства, поддерживаемый продольными конструктивными элементами 88 и поперечными конструктивными элементами 90, входящими в состав опорной структуры 78, и имеет размеры, которые необходимы для компенсации веса масс и любых опрокидывающих моментов, возникающих во время работы.
[43] Когда железнодорожный состав находится в положении для приема первой массы, подъемник приводится в движение, принимающий стол поднимается и масса поднимается с опорных направляющих на высоту зазора. Железнодорожный состав затем отъезжает от складированных масс до тех пор, пока вторая масса не окажется в положении над вторым транспортным устройством для подъема. В то время как вторая масса поднимается, первая масса и принимающий стол поворачиваются с помощью гидронасосов 80 до тех пор, пока масса не окажется параллельной пути. Затем масса опускается на опорную структуру 78 над двумя тележками транспортного устройства. Данная операция повторяется для погрузки масс на третье и четвертое транспортные устройства железнодорожного состава. После этого железнодорожный состав готов для отправки по силовому пути.
[44] Выгрузка масс на складском дворе прибытия выполняется путем обратного процесса. Железнодорожный состав прибывает на складской путь, конечная масса поднимается и поворачивается из продольного положения в поперечное положение для размещения с уменьшенным интервалом на К-образных опорах для складирования. По мере того как железнодорожный состав движется вперед для размещения первой массы, соседняя масса в железнодорожном составе затем поднимается, поворачивается, затем опускается в порядке следования на опорные направляющие. Этот шаг затем повторяется для третьей и четвертой массы в железнодорожном составе, который затем проходит под рядом накопленных масс и выпускается для перемещения по возвратному пути на исходный складской двор.
[45] На фиг.11А показаны детали примера осуществления начальных путевых участков силовой и возвратной путевой системы. Конкретные элементы каждой системы ARES будут зависеть от планируемой мощности складирования и генерации, разности уровней между нижним и верхним складскими дворами и уклона. Предприятие ARES с разностью уровней между верхним и нижним складскими дворами в 3600 футов (110 метров) и средним уклоном между складскими дворами 7,5% сможет заряжаться и разряжаться при 1000 МВт, при этом получая 8000 МВт-ч полезной аккумулированной энергии. Подобный пример осуществления изобретения может включать следующие фиксированные элементы.
[46] Пять параллельных электрифицированных основных путей, состоящих из двух силовых путей 14а и 14b, двух возвратных путей 16а и 16b и резервного пути 17, способного работать в любом из двух режимов; каждый основной путь имеет в длину 8,1 мили (13 км), соединяя верхний и нижний складские дворы. В других вариантах могут использоваться дополнительные силовые и возвратные пути для установления размеров системы ARES в соответствии с требованиями по мощности. В варианте осуществления изобретения с четырьмя силовыми путями и двумя возвратными путями основные пути обеспечивают загруженность для 203 или больше железнодорожных составов, которые находятся в режиме непрерывной загрузки или выгрузки и возврата. Рабочая скорость железнодорожного состава по силовому пути составляет примерно 35 миль/час (56 км/час) с бортовой системой электропитания для электрифицированных транспортных устройств в синхронном режиме, что будет описано далее, но может управляться при иной желаемой скорости для изменения потребляемой или вырабатываемой мощности питания. Синхронная скорость управления обеспечивает прямое соединение тяговых двигателей-генераторов на транспортных устройствах с путевой системой переменного тока со значительной экономией от повышения эффективности. Скорость пустого железнодорожного состава на возвратном пути является функцией общего количества железнодорожных составов в системе; тем не менее, примерная скорость возврата составляет 60-70 миль/час (100-110 км/час). В данном варианте примерно четырнадцать процентов общей длины силовых путей занято двигающимися железнодорожными составами, которые разнесены в пространстве примерно на 1300 футов (390 м) в движении, когда четыре пути заняты под загрузку/выгрузку и два заняты возвращающимися железнодорожными составами. Суммарная длина шести рабочих путей между верхним и нижним складскими дворами составляет 48,6 миль (78 км). Резервный путь может выступать в качестве замены либо силового пути, либо возвратного пути, по мере необходимости, что позволяет производить обслуживание и повышает эксплуатационную надежность. Силовой, возвратный и резервный пути имеют полную возможность функционировать в любом качестве и могут заменять друг друга, что обеспечивает ротацию в ходе регламентного технического обслуживания путей и даже распределение износа путей.
[47] Верхний складской двор 10 и нижний складской двор 12 показаны на фиг.11 В и фиг.11С, в одном примере осуществления изобретения каждый содержит примерно шестнадцать складских путей 65 по 1,2 мили (2 км) длиной. Каждый складской двор имеет примерно 1,7 мили (2,7 км) в длину и 800" (240 м) в ширину; дополнительная длина позволяет располагать индивидуальные складские пути уступами с трапецеидальной зоной охвата, что позволяет производить маневровые работы в начале и конце каждого пути. Множество соединительных путей и стрелок выполнены с возможностью для загруженного железнодорожного состава отправляться со складского двора для начала движения по одному из главных путей каждые 7,4 сек с интервалами между железнодорожными составами, как указано выше. Множество изолированных шин 84 питания, как описано выше, предоставляют путевое электропитание переменного тока (АС) для транспортных устройств-толкателей в железнодорожных составах, работающих на главных путях, резервном пути и складских путях. Эти шины питания подключены через определенные интервалы к путевой распределительной системе переменного тока на напряжение 2300 В, которая обеспечивает передачу питания к железнодорожным составам или от них в процессе работы на складских дворах, а также при генерации или выгрузке на главных путях. На фиг.7А показан пример выполнения шин 84 питания и соответствующих контакторов 89, закрепленных на конструкции толкателей с тяговыми электродвигателями в железнодорожном составе. На изображенном варианте показана вертикальная опора 91, на которой крепятся шины питания 3-фазного тока. В другом варианте осуществления изобретения путевое электропитание передается к транспортным устройствам и от них с помощью шин питания постоянного тока мощностью 3 кВт с соответствующим преобразованием в переменный ток на борту транспортных устройств.
[48] Дополнительные складские пути могут быть задействованы, в случае необходимости, для обеспечения резервных железнодорожных составов с быстрым доступом к складскому двору для немедленного ввода в действие в случае нарушений движения. Дополнительные массы, в случае необходимости, могут быть сформированы для поддержания резерва. Резервные транспортные устройства и резервные массы могут складироваться на одном и том же резервном запасном пути (одних и тех же резервных запасных путях). Подъездной путь 93 (показан на фиг.11А) задействуется для обеспечения доступа с предприятия ARES к рельсовой нитке общего пользования (для облегчения первоначального строительства, поставки транспортных устройств и оборудования для эксплуатации и ремонта). Транспортные устройства являются взаимозаменяемыми для предприятий ARES в разных местоположениях для работы в периоды максимальной региональной потребности в аккумулированной электроэнергии с оптимальными затратами. Тележки со стандартной шириной колеи для транспортных устройств обеспечивают транспортировку по коммерческой железнодорожной сети к любому требуемому местоположению.
[49] На фиг.11D показаны дополнительные верхний и нижний складские дворы 10′ и 12′, которые организуются в пределах верхнего и нижнего складских дворов 10 и 12. Такая конфигурация обеспечивает увеличение аккумулирующейся мощности, в то же время предоставляя легкость доступа с помощью стрелок к силовым, возвратным и резервным путям в железнодорожной системе.
[50] Для показанных вариантов осуществления изобретения все пути на предприятии системы ARES, включая складской путь, являются электрифицированными с параллельными шинами питания, что обеспечивает непрерывную подачу электропитания переменного тока к транспортным устройствам. Пути состоят из тяжелого (136 фунтов/ярд, 70 кг/м) рельса с закаленной головкой и со стандартной шириной колеи. Путь укладывается на дорожное основание повышенной прочности с прямой фиксацией колеи на железобетонные анкеры, уложенные с интервалом примерно 620′ (190 м) для показанного примера осуществления изобретения, для предотвращения деформации колеи на нисходящем уклоне. Решетка дорожного основания состоит из нескольких слоев балластной призмы, обычно щебеночного балласта основного слоя и подушки из горячей асфальтобетонной смеси. Складские дворы содержат множество параллельных складских путей, поэтому норма времени для отгрузки каждой массы не ограничена временем, которое необходимо для того, чтобы один ряд транспортных устройств был установлен в заданное положение и принял свои соответствующие грузы.
[51] На фиг.12 показана путевая система электропитания для настоящего варианта осуществления изобретения. Как описано выше со ссылкой на фиг.1, подстанция 28, связанная с высоковольтными линиями электропередачи, преобразует доступное электропитание в напряжение 34,5 кВ. Путевые электрические распределительные линии 30 распределяют или возвращают электроэнергию по путям в системе, представленной в виде силового пути 14 и возвратного пути 16 на фиг.12. Разъединители 90 с предохранителями соединяют электрические распределительные линии с трансформаторами 32, служащими для преобразования напряжения между 34,5 кВ и 2300 В переменного рабочего напряжения. Выключатели 92 соединяют шины 84а и 84b питания 3-фазного тока, которые соответствуют каждому пути для связи с контакторами на электрифицированных толкателях в железнодорожных составах. Для повышенной эффективности энергия, получаемая в результате рекуперативного торможения, либо на силовом пути, либо на возвратном пути, подается посредством прямого контакта с помощью соединительных проводов 94 между шинами питания для использования при подаче предпочтительного питания в железнодорожные составы, двигающиеся вверх, что позволяет не использовать соответствующую подстанцию и местный трансформатор и избежать потерь при передаче.
[52] Один вариант осуществления настоящего изобретения представляет из себя высокоэффективную и низкозатратную систему аккумулирования потенциальной энергии. Величину входной и выходной мощности можно значительно варьировать путем регулирования скорости и/или количества транспортных устройств с электроприводом, находящихся в движении. Стандартные фрикционные тормоза могут использоваться для парковки транспортных устройств с электроприводом и для их остановки в случае отказа в работе.
[53] Компьютер или компьютеры, входящие в автоматизированную систему 34 управления и выполняющие программное обеспечение для диспетчерского контроля и сбора данных (supervisory control and data acquisition, SCADA), используются для управления работой системы аккумулирования энергии. Далее приводится описание компьютерных датчиков, силовых приводов и примера алгоритма, которые могут использоваться для управления системой ARES для описанных примеров осуществления изобретения. Это только один пример компьютерных датчиков, приводов и процесса, и система аккумулирования энергии не ограничивается данными компьютерными датчиками, приводами и процессом.
[54] Система ARES функционирует заданным способом в зависимости от таких факторов, как требования к аккумулированию и высвобождению энергии, величине мощности аккумулирования или высвобождения, набор дополнительных услуг, которые система предоставляет для электрической сети, погодные условия и другие. В системе для индивидуального железнодорожного состава используются датчики, которые включают, но не ограничиваются этим, датчики положения, скорости, ускорения, положения массы, скорости и буксования колеса, электрической составляющей силы тока, электрической составляющей напряжения, электрический датчик температуры, механический датчик температуры, датчик положения рельсовой стрелки и другие. Эти датчики и коммуникационные компоненты могут быть проводными или беспроводными с различными системами и протоколами связи. В системе управления для индивидуального железнодорожного состава могут использоваться контроллеры, к которым относятся, но не ограничиваются этим, контроллер фрикционного тормоза, механизма стрелки, электрические и электронные выключатели, подъемные механизмы для масс железнодорожного состава и другие. Эти контроллеры могут быть электромеханическими, пневматическими или гидравлическими.
[55] Путевые локационные метки 95, расположенные через каждые 50 футов (15 м) вдоль главных путей, как показано на фиг.7В (закрепленные, например, на стойках для шин питания), выдают сигнал в датчики 96 на железнодорожных составах, сообщая о местоположении и скорости каждого железнодорожного состава. Используя эту информацию, система SCADA управляет движением всех транспортных устройств, находящихся в движении. На складских дворах локационные метки располагаются с гораздо меньшим интервалом, чтобы помочь позиционировать железнодорожные составы для погрузки масс. Локационные метки могут также располагаться на самих массах для окончательного позиционирования массы для погрузки. Приемопередатчик 97 дифференциальной GPS на железнодорожных составах, в качестве резерва для локационных датчиков/локационных меток, могут также передавать все местоположения транспортного устройства на дисплей, работающий в реальном масштабе времени, в центр управления. Передатчик локальной дифференциальной GPS на предприятии ARES или рядом с ним используют для повышения точности данных о транспортных устройствах, получаемых в центре управления. Дополнительные датчики на каждом железнодорожном составе отслеживают и управляют работой выпрямителя/инвертора, статусом резервного аккумулятора, статусом двигателя-генератора, работой подъемного механизма, работой тормозов, состоянием пути и объемом гидравлической среды, подаваемой под управлением системы SCADA. В примере осуществления изобретения мультиплексная телеметрическая система функционирует посредством шин, которые могут передавать однозначные команды каждому железнодорожному составу, с резервной системой связи, соединенной с локационными датчиками.
[56] Процесс запуска, работы и остановки аккумулирующей системы является заранее заданным набором шагов, которые выполняются компонентами. Также могут существовать заранее заданные шаги для изменения подводимой или производимой мощности, для выведения железнодорожного состава из процесса для ремонта и другие. Каждый шаг в процессе может быть выполнен одним датчиком и/или приводом или множеством датчиков и/или приводов. Кроме того, каждый железнодорожный состав может быть запрограммирован для работы в качестве элемента одноранговой ячеистой системы, в которой железнодорожный состав отвечает на оперативные требования, получаемые из центра управления, предусмотренным программой образом в отношении его позиции относительно других железнодорожных составов и установок стрелок. Пример блок-схемы работы представлен на фиг.13A-D.
[57] На шаге 1302 детектируется избыток мощности электрической сети и система ARES приступает к аккумулированию энергии. Используя пример системы согласно второму варианту осуществления изобретения и условную нумерацию железнодорожных составов, нумерацию масс и местоположений для аккумулирования для целей обозначения, железнодорожный состав №178 подключается к электрической сети и перемещается в позицию под массу №1584 в местоположение 4L-128 (складской путь 4, место складирования 128 нижнего складского двора) на шаге 1304. Железнодорожный состав загружают на шаге 1306; механизм переноса на первом транспортном устройстве железнодорожного состава №178 выдвигается для приема массы №1584, железнодорожный состав перемещается на одну позицию и механизм переноса на втором транспортном устройстве выдвигается для приема массы №1585, железнодорожный состав перемещается на одну позицию и механизм переноса на третьем транспортном устройстве выдвигается для приема массы №1586, железнодорожный состав перемещается на одну позицию и механизм переноса на четвертом транспортном устройстве выдвигается для приема массы №1587. Железнодорожная стрелка №L47 переводит складской путь №4 для права проезда вверх по выбранному силовому пути на шаге 1308. Данный процесс загрузки последовательно повторяется. Например, железнодорожный состав №179 затем перемещается в позицию под массу №1588 в местоположение 4L-132 (путь 4, пилонная позиция 132 нижнего складского двора) и т.д.
[58] Железнодорожный состав №178 продвигается по складскому пути №4 с правом проезда вверх и задействует электрическую сеть на шаге 1310. Бортовая система управления ускоряет железнодорожный состав до синхронной скорости на шаге 1312, а затем переводит в синхронный режим с прямым подключением на шаге 1314. Затем система ARES контролирует выравнивание (по требованиям к регулированию мощности вверх/регулированию мощности вниз по стандартам предприятия или ISO) на шаге 1316 и отслеживает требования для регулировки реактивной мощности на шаге 1318. Железнодорожная стрелка U21 переводится для права проезда вверх по складскому пути №8 на верхнем складском дворе на шаге 1320. Бортовая система управления переходит из синхронного режима с прямым подключением в режим замедления железнодорожного состава от синхронной скорости на шаге 1322. Железнодорожный состав №178 позиционирует массу №1584 в местоположение 8U-275 (путь 8, пилонная позиция 275 верхнего складского двора) на шаге 1324, железнодорожный состав затем выгружает массы на шаге 1326; механизм переноса на первом транспортном устройстве железнодорожного состава №178 выдвигается для выгрузки массы №1584 в местоположении 8U-275, железнодорожный состав перемещается на одну позицию и механизм переноса на втором транспортном устройстве выдвигается для выгрузки массы №1585, железнодорожный состав перемещается на одну позицию и механизм переноса на третьем транспортном устройстве выдвигается для выгрузки массы №1586, железнодорожный состав перемещается на одну позицию и механизм переноса на четвертом транспортном устройстве выдвигается для выгрузки массы №1587. Затем на шаге 1328 производится определение, оставлять ли железнодорожный состав №178 на верхнем складском дворе или возвращать на нижний складской двор для транспортировки дополнительных масс. В случае возврата железнодорожная стрелка U21 переводит складской путь №8 для движения с правом проезда вниз по выбранному возвратному пути на шаге 1330 и железнодорожный состав №178 спускается с пути №8 в нижний двор на шаге 1322. В случае если состав остается, стрелка U21 переводит складской путь №8 на боковой путь верхнего складского двора на шаге 1333 и железнодорожный состав №178 перемещается на шаге 1334 с пути №8 на боковой путь верхнего складского пути. В зависимости от требований к складским рельсовым путям, железнодорожный состав может оставаться в позиции под массами. Шаги последовательно повторяются для дополнительных масс для аккумулирования до тех пор, пока не будут выполнены требования к аккумулированию энергии, выдвинутые предприятием или ISO.
[59] При приеме запроса на электроэнергию в соответствии с требованиями предприятия или ISO, на шаге 1336 стрелка U21 соединяет боковой путь верхнего складского двора с путем №8 верхнего склада и железнодорожный состав №178 подключается к электрической сети на шаге 1338 и перемещается в позицию под массу №1587 в местоположение 8U-275 (путь 8, пилонная позиция 275 верхнего двора) и загружается на шаге 1340. Для загрузки железнодорожного состава механизм переноса на первом транспортном устройстве железнодорожного состава №178 выдвигается для загрузки массы №1587 в местоположении 8U-275, железнодорожный состав перемещается на одну позицию и механизм переноса на втором транспортном устройстве выдвигается для загрузки массы №1586, железнодорожный состав перемещается на одну позицию и механизм переноса на третьем транспортом устройстве выдвигается для загрузки массы №1585, железнодорожный состав перемещается на одну позицию и механизм переноса на четвертом транспортном устройстве выдвигается для загрузки массы №1584. Железнодорожная стрелка №U21 на шаге 1344 переводит путь №8 для права проезда вниз. Железнодорожный состав №178 на шаге 1346 движется по пути №8 с правом проезда вниз и задействует генераторы тележек для управления скоростью, передавая вырабатываемую электроэнергию в электрическую сеть по мере достижения нижнего двора. Эта операция последовательно повторяется для дополнительных железнодорожных составов. Железнодорожный состав №177 перемещается в позицию под массой №1583 в местоположение 8U276 и т.д.
[60] Бортовая система управления ускоряет железнодорожный состав №178 до синхронной скорости и затем переводится в синхронный режим с прямым подключением на шаге 1348. Затем система контролирует выравнивания (по требованиям к регулированию вверх/регулированию вниз), на шаге 1350 и отслеживает требования для регулировки реактивной мощности на шаге 1352. При приближении к нижнему складскому двору железнодорожную стрелку L47 на шаге 1354 переводят для права проезда вниз на путь №4 нижнего двора. Бортовая система управления переходит из синхронного режима с прямым подключением в режим замедления железнодорожного состава от синхронной скорости на шаге 1356. Железнодорожный состав №178 позиционирует массу №1587 в местоположение 4L-128 на шаге 1358. Затем железнодорожный состав выгружает массы на шаге 1360; механизм переноса на первом транспортном устройстве железнодорожного состава №178 выдвигается для выгрузки массы №1587 в местоположении 4L-128, железнодорожный состав перемещается на одну позицию и механизм переноса на втором транспортном устройстве выдвигается для выгрузки массы №1586, железнодорожных состав передвигается на одну позицию и механизм переноса на третьем транспортном устройстве выгружает массу №1585, железнодорожный состав перемещается на одну позицию и механизм переноса выдвигается для выгрузки массы №1585. Затем на шаге 1362 производится определение, оставлять железнодорожный состав №178 на нижнем дворе или возвращать на верхний двор для транспортировки дополнительных масс. В случае возвращения железнодорожная стрелка U21 переводит путь №8 с правом проезда вверх на выбранный возвратный путь на шаге 1364 и железнодорожный состав №178 поднимается со складского пути №8 на верхний двор на шаге 1366. В случае если состав оставляют на нижнем складском дворе, позиция железнодорожного состава либо сохраняется, либо складской путь переводится на боковой путь на шаге 1368 и железнодорожный состав перемещается по боковому пути на шаге 1370.
[61] На фиг.10А два транспортных устройства в каждом железнодорожном составе, каждое с двумя трехосными радиальными тележками 76, дающими в совокупности шесть осей 101, получают питание от внутренних синхронных двигателей-генераторов 102 переменного тока с постоянными магнитами для создания достаточного усилия для торможения железнодорожного состава при движении вниз. Такие синхронные двигатели-генераторы заменяют асинхронные двигатели-генераторы, используемые в настоящее время в отрасли железнодорожных перевозок. Оставшиеся транспортные устройства не получают питания посредством тяговых ведущих осей и размещаются поочередно между толкателями в железнодорожном составе для достижения максимального сцепления за счет масс, загруженных в процессе погрузки и выгрузки. В других вариантах осуществления изобретения общее количество осей и/или транспортных устройств с силовым приводом может меняться в зависимости от эксплуатационных требований.
[62] Вращающий момент двигателей-генераторов передается на ведущие оси или от них через механический редуктор 104, и скорость ведущих колес определяется числом полюсов в двигателе-генераторе, постоянным передаточным отношением редуктора и частотой привода устройства 106 управления тягой (TCU), предоставленных для каждого толкателя, что далее будет описано более подробно.
[63] Как показано на фиг.10В, работа железнодорожных составов синхронно с путевой системой распределения улучшается за счет применения элементов трансмиссии в редукторе 104. Кулачковая муфта 105, работающая между блоками 107а и 107b шестерен, обеспечивает выбор первой синхронной скорости для силового режима работы транспортных устройств в загруженном железнодорожном составе и второй синхронной скорости для возвратного режима работы железнодорожных составов в ненагруженном состоянии.
[64] Скорость железнодорожного состава определяется с помощью TCU, который в ответ на команды из центра управления системы SCADA определяет частоту, с которой работают синхронные двигатели-генераторы, а значит, и скорость транспортных устройств в железнодорожном составе.
[65] Для описанного варианта осуществления изобретения два транспортных устройства, которые приводятся в движение тяговыми электродвигателями как электрифицированные толкатели в железнодорожном составе, движутся каждый на двух парах радиальных трехосных тепловозных тележек с электрической передачей. Такая конструкция предусматривает шесть осей на каждый вагон и обеспечивает нагрузку на колесо для загруженного железнодорожного состава в 50000 фунтов (50 тонн на ось). Для примера осуществления описанного варианта изобретения каждый рекуперативный тяговый двигатель-генератор имеет пиковую мощность 1,25 МВт, приходящуюся на ось с понижающим редуктором, как описано выше. При скорости 35 миль/ч (56 км/час) и уклоне в 7,5% каждая ось, снабженная двигателем-генератором, будет генерировать мощность, отдаваемую в электрическую сеть, (после потерь КПД в системе) в размере 0,74 МВт из потенциальной энергии масс, перевозимых каждым железнодорожным составом, находящимся в движении. Потребность в пиковой электроэнергии на ось тягового толкателя рассчитывается как энергия массы железнодорожного состава в движении при скорости 35 миль/ч (12,5 МВт), деленная на количество ведущих осей на состав (12), умноженная на резервную мощность 20% для ускорения/замедления (1,2).
[66] Отдаваемая в электрическую сеть мощность оси толкателя может быть вычислена как мощность загруженного железнодорожного состава в движении при 35 миль/ч (56 км/час) (12,5 МВт), деленная на весовое отношение массы к составу (1,26), деленная на количество ведущих осей на состав (12), умноженная на сниженный КПД в системе одностороннего движения (0,89), что дает в результате 0,74 МВт.
[67] Каждый железнодорожный состав в примере осуществления изобретения, представляющий из себя поезд из двух толкателей и двух транспортных устройств без электропривода, что дает 12 ведущих осей, будет генерировать примерно 8,8 мегаватт отдаваемой мощности при синхронизированной передаче прямо в электрическую сеть при скорости 35 миль/ч (56 км/час) и уклоне 7,5%. Варианты уклона в пределах конкретного предприятия ARES подбираются путем изменения параметров устройства двигателя-генератора и/или редуктора на каждой оси для получения максимальной мощности для уклона с учетом компонента резервной мощности для ускорения или замедления, соответствующих данному уклону. Варианты уклона на разных площадках ARES могут подбираться путем увеличения количества неведущих осей, если пиковый уклон является более пологим, или увеличением количества ведущих осей, если уклон является более крутым. В других вариантах осуществления изобретения варианты уклона могут подбираться путем изменения соотношения толкателей к нетяговым транспортным устройствам в железнодорожном составе; или комбинацией этих двух способов.
[68] В случае применения предприятия ARES в 1000 МВт на полную проектную мощность будет использовано 1326 двигателей-генераторов с осевой подвеской на 227 толкателях в 114 железнодорожных составах, нагруженных массами, в движении по шести силовым путям в данный момент времени. Другие 106 железнодорожных составов либо возвращаются на загруженный складской двор для принятия своего следующего груза из масс, либо находятся в процессе упорядочивания своей загрузки. Наличие незагруженных железнодорожных составов, возвращающихся для загрузки по возвратным путям с примерной контрольной скоростью, равной двойной скорости, с полным грузом (путем изменения передаточного числа трансмиссии в существующем варианте для обеспечения синхронного режима возврата) по силовым путям значительно сокращает капитальные затраты системы при минимальном влиянии на КПД.
[69] Варианты уклона для данной системы могут подбираться путем регулировки параметров двигателей-генераторов исходя из требований в электроэнергии для самого крутого участка железной дороги и сокращения количества задействованных двигателей-генераторов на данном транспортном устройстве или железнодорожном составе, таким образом, чтобы потребность в электроэнергии соответствовала потенциальной энергии уклона пути в данной точке. Это позволяет каждому железнодорожному составу устанавливать заданную скорость синхронизации с электрической сетью без потери синхронизации с прямым подключением. По существу используют регулирование железнодорожных составов путем изменения количества двигателей-генераторов, находящихся в рабочем режиме, для соответствия уклону пути, вместо изменения частоты управления их двигателей-генераторов.
[70] Для получения необходимых эксплуатационных характеристик тяговых транспортных устройств применяется бортовая система электропитания, изображенная на фиг.14. Путевая система электропитания (для показанных вариантов это трехфазная система на 2300 В переменного напряжения) подключается к электрифицированному транспортному устройству или толкателю через разнесенные автоматические выключатели 92, присоединенные к шинам 84 питания. Контакторы 89 на транспортном устройстве соединяются с устройством 106 управления тягой (TCU). Контакторы 107 главной железнодорожной линии, управляемые блоком 108 управления TCU, описанные далее более подробно, подключаются к контакторам шин питания с регулированием параметров электропитания через линейный фильтр 110 переменного тока к первому трехуровневому активному выпрямителю/инвертору 112 на стороне электростанции общего пользования. Для приведенных вариантов используется схема биполярного транзистора с изолированным затвором (insulated gate bipolar transistor, IGBT). Второй трехуровневый активный выпрямитель/инвертор 114 со стороны генератора передает питание к двигателям-генераторам 102 (или от них). Предлагается схема 116 предварительного заряда шины, также управляемая блоком управления. Датчики 120а и 120b тока и датчики 122а, 122b и 122 с напряжения используются блоком управления для регистрации и управления выпрямителями/инверторами со стороны путевой системы электропитания, а датчики 126а и 126b тока и датчики 128а, 128b и 128 с напряжения используются блоком управления для регистрации мощности двигателя-генератора и управления этой мощностью. Блок управления обеспечивает управление ускорением, замедлением и выравниванием двигателей-генераторов, что будет более подробно описано далее.
[71] Реверсивные обходные контакторы 130 применяются для прямого подключения двигателя-генератора к путевой системе электропитания для синхронной работы при заданной контрольной скорости транспортного устройства. Ускорение транспортного устройства до контрольной скорости осуществляется схемами выпрямителя/инвертора с IGBT, при этом в отсутствие требований к управлению выравниванием, блок управления задействует соответствующие реверсивные обходные контакторы для синхронного режима работы. При необходимости блок управления повторно задействует схемы выпрямителя/инвертора с IGBT, отсоединяя реверсивные обходные контакторы для замедления транспортного устройства или для выполнения требований электрической сети по выравниванию, что будет описано более подробно далее.
[72] Взаимосвязь управления с помощью программного обеспечения SCADA в центре управления выполняется посредством блока управления на каждом транспортном устройстве, как описывалось ранее. Оперативное управление транспортным устройством осуществляется блоком 108 управления TCU. Блок управления разделяет активную мощность и реактивную мощность как для выпрямителя/инвертора со стороны генератора, так и для выпрямителя/инвертора со стороны электростанции. Разделение осуществляется использованием преобразований стационарных систем во вращательные, хорошо известных в литературе. В выпрямителе/инверторе 114 со стороны генератора (изображенного на фиг.14) реактивная мощность выравнивается по продольной оси генератора. В выпрямителе/инверторе 112 со стороны электростанции (изображенном на фиг.14) ось активной мощности выравнивается с напряжением электростанции, где компонент реактивной мощности сдвинут по фазе на 90 градусов относительно напряжения электростанции. Разделение активной и реактивной мощностей обеспечивает управление степенями ускорения и замедления, а также тарифами на электроэнергию для транспортных устройств независимо от реактивной мощности, создаваемой транспортным устройством. Это имеет место даже при нулевой скорости и нулевом ускорении, когда активная мощность равна нулю, но реактивная мощность остается выбираемой и доступной для поддержки электростанции.
[73] Как подробно показано на фиг.15А, для управления каждым из выпрямителей/инверторов 112, 114 трехфазные напряжения Va, Vb и Vc (пересчитанные, как необходимо) отдатчиков 128а, 128b и 128 с напряжения принимаются первым фазовым конвертором 140, который дает на выходе два фазовых напряжения Vx и Vy. Вычислитель 142 фазового сдвига определяет фазовый сдвиг 0 (рассчитанный как θ=tan-1 (Vx/Vy)) для первого преобразователя 144 стационарной системы во вращательную, который дает на выходе действительную составляющую напряжения Vdf и мнимую составляющую напряжения Vqf. Подобным образом трехфазный ток со значениями ia, ib и ic поступает от датчиков 126а и 126b тока в качестве входных значений второго конвертера 146, который дает на выходе фазовые токи Ix и Iy. Второй вычислитель 148 фазового сдвига определяет фазовый сдвиг 0 (рассчитанный как θ=tan-1 (Ix/Iy)) для второго преобразователя 150 стационарной системы во вращательную, который дает на выходе действительную составляющую тока Id и мнимую составляющую тока Iq. На основании требований к ускорению/замедлению или других системных требований, которые будут далее описаны более подробно, центр управления SCADA выдает команду для активной мощности (обозначенную id*), которая принимается первым сумматором 152 в контроллере 154 инвертора выпрямителя, который принимает выходной сигнал id из второго преобразователя 150 стационарной системы во вращательную. Команда для реактивной мощности (обозначенная iq*) вырабатывается системой SCADA для второго сумматора 156 в контроллере выпрямителя/инвертора, который принимает выходной сигнал iq от второго преобразователя стационарной системы во вращательную. Составляющая суммарной активной мощности подается на первый компенсатор 158, а составляющая суммарной реактивной мощности подается на второй компенсатор 160. Выходной сигнал первого компенсатора подается на сумматор 162, принимающий Vdf от первого преобразователя стационарной системы во вращательную, для формирования команды для активной мощности Vd*, а выходной сигнал второго компенсатора подается на сумматор 164, принимающий Vqf от первого преобразователя стационарной системы во вращательную, для формирования команды для реактивной мощности Vq*. Значения Vd* и Vq* формируются в качестве входных сигналов для векторного модулятора 166, который вырабатывает цифровые сигналы переключения SA, SA инверсный, SB, SB инверсный и SC, SC инверсный для выпрямителей/инверторов для регулирования мощности. Контроллер выпрямителя/инвертора для выпрямителя/инвертора 112 со стороны электростанции получает команды как для активной мощности, так и для реактивной мощности от SCADA, в то время как контроллер выпрямителя/инвертора для выпрямителя/инвертора 114 со стороны генератора имеет команду для реактивной мощности, установленную в нуль.
[74] В описываемых вариантах осуществления выпрямители/инверторы частично рассчитаны на основе требований двигателей-генераторов для обеспечения возможности использования комбинированного IGBT-управления реактивной мощностью всех транспортных устройств с электроприводом в системе для поддержки реактивной мощности (Volt-Ampere Reactive, VAR) для электростанций или независимых системных операторов (ISO), связанных с системой ARES. По меньшей мере один IGBT в каждом транспортном устройстве подключается к высоковольтной системе передачи посредством бортовой и путевой систем электропитания, как показано и описано со ссылкой на фиг.12 и фиг.14. Команды для активной мощности (Р компонента) блока управления TCU обеспечивают необходимые операции по ускорению и замедлению транспортных устройств. Реактивная мощность (Q компонента), доступная в биполярных транзисторах с изолированным затвором (IGBT) выпрямителя/инвертора, может регулироваться для приема/потребления реактивной мощности из высоковольтной системы, как описано выше. Для всех транспортных устройств, не создающих никакой активной мощности (остановленных и ожидающих погрузки или перемещения), полная допустимая мощность транзисторов IGBT в TCU доступна для реактивной мощности. Получив команду, реактивный ток (из фазы входа напряжения), направленный через транзисторы IGBT выпрямителя/инвертора с помощью блока управления, может быть использован для оказания воздействия на напряжение в электрической сети. Измерение напряжения и команды на регулировку реактивной мощности могут быть получены на основе измерения напряжения в центре управления электрической сетью в необходимых местоположениях, географически отделенных от системы ARES.
[75] В примерах осуществления изобретения для регулирования реактивной мощности даже со 100% транзисторов IGBT в рабочем состоянии для ускорения/замедления или для асинхронного управления выбранными транспортными устройствами используются инверторы с повышенной примерно на 4% мощностью, что дает возможность использования 25% номинальной мощности для управления реактивной мощностью в ответ на запросы/требования на регулировку реактивной мощности.
[76] Команда на регулировку реактивной мощности может быть сгенерирована одним из трех практических способов. Первый заключается в том, что система аккумулирования энергии просто выдает команду с уровнем реактивной мощности. Он может быть переменным или фиксированным и часто устанавливается в нуль для управления системой с коэффициентом мощности, равным единице. Во втором подходе уровни реактивной мощности задаются командой внешнего оператора, часто оператором системой передачи электрической сети. При этом оператор ручным образом подает команду на установку различных уровней реактивной мощности в течение дня или сезонно, по необходимости. Третий подход заключается в замыкании контура настройки напряжения, когда устанавливается заданное значение напряжения для работающего предприятия, и оно сравнивается с реальным рабочим напряжением. Разница между этими двумя уровнями создает сигнал ошибки, который затем может использоваться для команды на регулировку реактивной мощности. Система SCADA, функционирующая в автоматизированной системе управления, как показано на фиг.14, может осуществлять такую регулировку для описанных вариантов. Таким образом, общая или индивидуальная команда может быть послана выбранному количеству выпрямителей/инверторов транспортных устройств, необходимых для выполнения необходимой регулировки реактивной мощности.
[77] Команда на регулировку реактивной мощности обрабатывается выпрямителем/инвертором транспортного устройства, как показано на фиг.15В. Команда уровня реактивной мощности принимается на шаге 1502 в системе управления ARES из центра управления электрической сети. Система SCADA определяет количество транспортных устройств, которые являются стационарными, на шаге 1504 и выдает команду в блоки управления в этих транспортных устройствах на изменение максимальной реактивной мощности в сторону увеличения до общей требуемой реактивной мощности на шаге 1506. Блоки управления управляемых блоков выпрямителей/инверторов транспортных устройств в данных транспортных устройствах выдают команды Iq* для создания выпрямителем/инвертором со стороны электростанции полной реактивной мощности на шаге 1508. Если требуется дополнительная реактивная мощность, сверх той, которая может быть создана стационарными транспортными устройствами на шаге 1510, SCADA определяет уровни активной мощности на каждом задействованном транспортном устройстве на шаге 1512 и выдает команду на увеличение реактивной мощности до полной номинальной мощности выпрямителей/инверторов, как описано выше, для транспортных устройств в движении на шаге 1514 до полной требуемой реактивной мощности. Блок управления на каждом транспортном устройстве под управлением SCADA выдает команды Iq* на увеличение до полной номинальной мощности, согласующиеся с командой Id*, выданной для активной мощности при работе транспортного устройства на шаге 1516.
[78] Аналогично, в то время как наивысшая производительность во всей системе ARES может быть получена в синхронном режиме работы электрифицированных транспортных устройств по силовым путям, регулирование мощности электросети вверх или регулирование мощности электросети вниз и также выравнивание мощности, которая аккумулируется или генерируется, может быть достигнуто путем эксплуатации выбранных транспортных устройств асинхронно вместе с TCU, как описано со ссылками на фиг.14 и фиг.15А, путем приведения в движение или торможения блоков выпрямителя/инвертора при конкретной требуемой мощности. Выделение одного или более выбранных силовых путей, необходимых для использования с целью создания требуемой величины регулирования мощности вверх/регулирования мощности вниз или выравнивания посредством асинхронного режима работы железнодорожных составов на выбранном пути (выбранных путях), обеспечивает контроль скорости всех железнодорожных составов, идущих по данному пути, с одновременной поддержкой разделения между железнодорожными составами, находящимися в движении, и с установлением последовательности въезда на складские дворы или выезда с этих дворов. Эксплуатация оставшихся силовых путей в синхронном режиме работы сохраняет более высокий общий КПД для оставшихся электрифицированных транспортных устройств в системе.
[79] В процессе генерации требования к быстрому регулированию вниз требует первоначального дополнительного торможения железнодорожных составов на выбранном силовом пути, в результате чего возникает выброс мощности. Для предотвращения воздействия данного выброса на сеть путевая система электропитания, как показано на фиг.12, обеспечивает поглощение мощности посредством команды SCADA возвращающимся транспортным устройствам увеличить скорость, что влечет за собой более высокий расход энергии. Использование возвращающихся железнодорожных составов для поглощения любых выбросов мощности дает возможность использовать команды на немедленное регулирование вниз без сильного воздействия на сеть, независимо от статуса работы системы ARES.
[80] Алгоритм регулирования мощности вверх или регулирования мощности вниз, а также выравнивания показан на фиг.15С. Когда получена команда на регулировку на шаге 1550, от центра управления электрической сети электростанции, работающей по контракту, или электростанции независимого системного оператора производится определение того, эксплуатируется ли какой-либо силовой путь в несинхронизированном режиме на шаге 1552. Если нет, SCADA отдает команду железнодорожным составам на каком-либо выбранном пути переключиться на работу выпрямителя/инвертора на шаге 1554. После переключения или если какой-либо силовой путь уже работает в несихронизированном режиме, SCADA выдает команды железнодорожным составам на выбранном пути на ускорение или замедление по предварительно запрограммированной совокупности параметров на шаге 1556, где отклонение потребляемой мощности равно заданному командой регулированию вверх или регулированию вниз. В запросе на регулирование мощности вниз, когда замедление создало бы иным образом скачок в потребляемой мощности для данного пути, взаимосвязь силовых путей, как описано выше, позволяет задействовать избыток мощности для снабжения питанием возвращающихся железнодорожных составов с транспортными устройствами на возвратном пути. Железнодорожные составы затем возобновляют работу с постоянной скоростью на мощности выпрямителя/инвертора при измененной скорости для обеспечения необходимой потребляемой мощности. Если достигается недостаточное регулирование мощности вверх или регулирование мощности вниз путем перевода одного силового пути в асинхронный режим работы, SCADA направит железнодорожные пути по второму силовому пути для преобразования мощности выпрямителя/инвертора.
[81] Операции по выравниванию выполняются в пределах системы ARES для формирования определенной выходной мощности или аккумулирования энергии путем регулирования одного или более путей в асинхронном режиме работы для получения определенной мощности, потребляемой железнодорожными составами. Регулировки выравнивания в более долгосрочном периоде могут быть подобраны путем изменения скорости отправки железнодорожных составов по данному силовому пути.
[82] Описанные варианты осуществления изобретения предоставляют возможность аккумулирования энергии и энергоснабжения, а также предоставления вспомогательных услуг, таких как регулировка реактивной мощности, регулировка мощности вверх и регулировка мощности вниз в электрической сети.
[83] В то время как представленное описание изобретения позволяет специалисту изготовить и использовать то, что может рассматриваться в настоящее время как лучший вариант осуществления изобретения, для специалистов в данной области очевидно наличие вариантов, комбинаций и эквивалентов указанных варианта, способа и примеров, изложенных в настоящей заявке. Изобретение, таким образом, не ограничено вышеизложенными вариантом, способом и примерами и определяется объемом формулы изобретения.