Результат интеллектуальной деятельности: ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА
Вид РИД
Изобретение
Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока, и может использоваться для минимизации потерь электроэнергии при питании асинхронного электродвигателя от преобразователя частоты, а также регулирования момента и скорости асинхронных двигателей с фазным ротором.
Известен электропривод переменного тока, содержащий асинхронный двигатель, трехфазный инвертор с ШИМ-регулятором тока, два датчика тока статора, с помощью которых реализуются обратные связи по фазным токам статора, датчик скорости, установленный на валу двигателя, с помощью которого реализуется обратная связь по скорости, регулятор скорости, блок расчета задания модуля тока намагничивания, регуляторы фазных токов намагничивания, блок расчета сигналов задания тока намагничивания, блок задания частоты вращения поля статора, блок коррекции задания на ток намагничивания, блок расчета скольжения двигателя для коррекции параметров регуляторов фазных токов намагничивания [1].
Недостатками данного устройства являются сложность и малая точность адаптивных регуляторов фазных токов намагничивания, параметры которых изменяются при изменении скольжения, а также большая погрешность вычисления угла между моментообразующими векторами, обусловленная температурным дрейфом параметров двигателя.
Наиболее близким к изобретению по технической сути и достигаемому результату является электропривод переменного тока, содержащий асинхронный двигатель, трехфазный инвертор с ШИМ-регулятором тока, два датчика тока статора, с помощью которых реализуются обратные связи по фазным токам статора, датчик скорости, установленный на валу двигателя, с помощью которого реализуется обратная связь по скорости, регулятор скорости, блок расчета задания на момент двигателя, блок расчета задания модуля тока статора, блок задания фазных токов статора, блоки расчета фазных потокосцеплений ротора, блок расчета скольжения, блок задания частоты вращения поля статора, блок коррекции задания момента двигателя, с помощью которого формируется модуль вектора тока статора, в котором корректирующий сигнал определяется путем сравнения заданного и рассчитанного угла между векторами тока статора и потокосцепления ротора, и суммируется с сигналом задания на момент двигателя [2].
Недостатками данного устройства являются сложность и малая точность адаптивных блоков расчета фазных потокосцеплений ротора, параметры которых изменяются при изменении скольжения, а также появление дополнительной погрешности вычисления угла между моментообразующими векторами, обусловленной температурным дрейфом параметров двигателя.
Целью изобретения является упрощение и повышение работоспособности схемы управления, минимизация тока статора за счет построения системы коррекции задания момента двигателя, осуществляющей выработку корректирующего сигнала в функции более просто определяемого параметра - тангенса угла между векторами тока статора и тока намагничивания, вычисляемого на основании измеренных значений фазных токов статора и ротора двигателя.
Предлагаемый электропривод переменного тока содержит трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум статорным обмоткам асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой статора напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулятора тока, выходы двух датчиков фазного тока статора соединены с входами сумматора фазных токов статора, а также соединены с двумя входами первой группы фазных входов блока ШИМ-регулятора тока, а также соединены с двумя входами первой группы фазных входов блока вычисления параметра взаимной ориентации между вектором тока статора и параметром намагничивания, выход сумматора фазных токов статора соединен с третьим входом первой группы фазных входов ШИМ-регулятора тока статора и с третьим входом первой группы фазных входов блока вычисления параметра взаимной ориентации между вектором тока статора и параметром намагничивания, датчик скорости, установленный на валу двигателя, выход которого соединен с отрицательным входом блока сравнения, положительный вход которого подключен к блоку задания скорости, а выход блока сравнения подключен к входу пропорционально-интегрального регулятора скорости, выход которого подключен к входу блока ограничения, выход которого подключен к первому входу сумматора сигналов задания момента, выход которого подключен к входу формирователя задания модуля тока статора, выход которого подключен к амплитудному входу блока задания мгновенных значений тока статора, три фазных выхода которого соединены с тремя фазными входами второй группы входов ШИМ-регулятора тока, выход блока расчета параметра взаимной ориентации между векторами тока статора и параметра намагничивания соединен с отрицательным входом блока сравнения параметра взаимной ориентации, положительный вход которого соединен с блоком задания параметра взаимной ориентации, а выход блока сравнения параметра взаимной ориентации подключен ко входу блока коррекции задания момента двигателя, выход которого подключен ко второму входу сумматора сигналов задания момента, выход пропорционального блока расчета электрической частоты соединен с частотным входом блока задания мгновенных значений тока статора, выход блока задания разности частот вращения поля статора и ротора двигателя соединен с первым входом сумматора цепи задания частоты, асинхронный двигатель выполнен с фазным ротором, выход датчика скорости соединен с первым входом блока ограничения частоты, со вторым входом которого соединен выход блока задания скорости, а выход блока ограничения частоты соединен со вторым входом сумматора цепи задания частоты, выход которого соединен с входом пропорционального блока расчета электрической частоты, два фазных вывода ротора через датчики фазного тока ротора соединены в общую точку, к которой также напрямую подключен третий фазный вывод ротора, выходы двух датчиков фазного тока ротора соединены с входами сумматора фазных токов ротора, а также соединены с двумя входами второй группы фазных входов блока вычисления параметра взаимной ориентации между вектором тока статора и параметром намагничивания, выход сумматора фазных токов ротора соединен с третьим входом второй группы фазных входов блока вычисления параметра взаимной ориентации между вектором тока статора и параметром намагничивания, параметром намагничивания двигателя является намагничивающий ток, а параметром взаимной ориентации между векторами тока статора и параметром намагничивания является тангенс угла между векторами тока статора и намагничивающего тока.
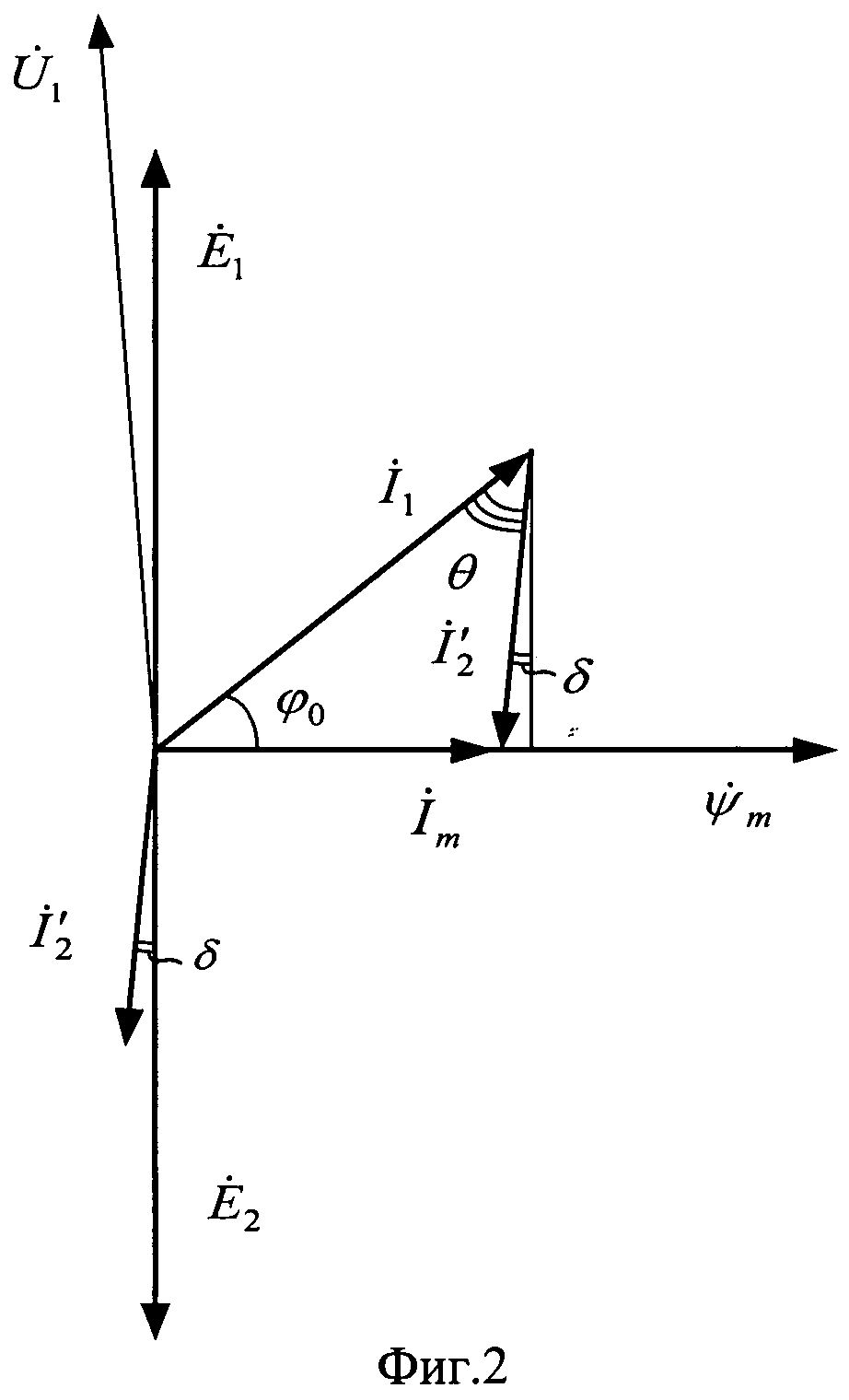
На фиг.1 приведена функциональная схема электропривода переменного тока; на фиг.2 приведена векторная диаграмма асинхронного двигателя для определения угла φ0.
Электропривод переменного тока содержит инвертор 1, два силовых выхода которого соединены через датчики тока 2 и 3 с двумя обмотками статора асинхронного двигателя 4, а третий выход инвертора 1 соединен с третьей обмоткой статора двигателя 4 напрямую. На валу двигателя 4 установлен датчик скорости 5. Управляющие входы инвертора 1 соединены с выходами блока широтно-импульсной модуляции (ШИМ) регулятора тока 6. Выходы датчиков тока 2, 3 соединены с отрицательными входами сумматора тока 7, а также с двумя отрицательными фазными входами блока ШИМ регулятора тока 6, еще с одним отрицательным фазным входом которого соединен выход сумматора тока 7. Выход датчика скорости 5 соединен с отрицательным входом блока сравнения скорости 8, положительный вход которого подключен к блоку задания скорости 9, а выход блока сравнения скорости 8 подключен к входу регулятора скорости 10, выход которого подключен ко входу блока ограничения 11, выход которого подключен к первому входу сумматора сигналов задания момента двигателя 12, выход которого подключен к входу формирователя задания модуля тока статора 13, выход которого подключен к амплитудному входу блока задания мгновенных значений тока статора 14, три фазных выхода которого соединены с тремя положительными фазными входами блока ШИМ регулятора тока 6. Второй вход сумматора сигналов задания момента 12 подключен к выходу блока коррекции задания момента двигателя 15, вход которого соединен с выходом блока 16 сравнения величин заданного и рассчитанного тангенса угла между векторами тока статора и тока намагничивания, положительный вход которого соединен с выходом блока 17 задания тангенса угла между векторами тока статора и тока намагничивания, а отрицательный вход блока сравнения 16 соединен с выходом блока 18 вычисления тангенса угла между векторами тока статора и тока намагничивания. Выходы датчиков фазного тока статора 2, 3 и выход сумматора фазных токов статора 7 подключены к первым фазным входам блока 18 вычисления тангенса угла между векторами тока статора и тока намагничивания. Два фазных вывода ротора двигателя 4 подключены к первым выводам датчиков 19, 20 фазного тока ротора, вторые выводы которых соединены в общую точку, к которой также напрямую подключен третий фазный вывод ротора. Выходы датчиков фазного тока ротора 19, 20 подключены к отрицательным входам сумматора фазных токов ротора 21, выход которого, а также выходы датчиков фазного тока ротора 19, 20, подключены ко вторым фазным входам блока 18 вычисления тангенса угла между векторами тока статора и тока намагничивания. Выход датчика скорости 5 соединен с первым входом блока ограничения частоты 22, со вторым входом которого соединен выход блока задания скорости 9, а выход блока 22 соединен с одним входом сумматора 23 цепи задания частоты, второй вход которого соединен с блоком 24 задания разности частот вращения поля статора и ротора двигателя, выход сумматора 23 соединен со входом пропорционального блока расчета электрической частоты 25, выход которого соединен с частотным входом блока задания мгновенных значений тока статора 14.
Электропривод переменного тока работает следующим образом.
Инвертор 1 через датчики 2,3 фазных токов питает статорные обмотки асинхронного двигателя 4 широтно-модулируемыми пульсациями силового напряжения, длительность которых определяется управляющими пульсациями, поступающими с выхода ШИМ регулятора тока 6. Формирование задания на блок ШИМ регулятора тока 6 происходит следующим образом.
Сигнал задания на скорость  , поступающий с блока задания скорости 9, сравнивается на блоке сравнении 8 с сигналом текущей скорости вращения ротора ω-, поступающего с датчика скорости 5, и поступает на вход пропорционально-интегрального (ПИ) регулятора 10, сигнал с выхода которого поступает на блок ограничения 11. Сигнал с выхода блока ограничения 11 поступает на первый вход сумматора сигналов задания момента 12, на второй вход блока 12 поступает корректирующий сигнал с выхода блока коррекции задания момента двигателя 15. Сигнал с выхода сумматора сигналов задания момента 12 поступает на вход формирователя задания модуля тока статора 13, с выхода которого задание на модуль тока статора поступает на амплитудный вход блока задания мгновенных значений тока статора 14, в котором формируются заданные мгновенные значения тока статора.
, поступающий с блока задания скорости 9, сравнивается на блоке сравнении 8 с сигналом текущей скорости вращения ротора ω-, поступающего с датчика скорости 5, и поступает на вход пропорционально-интегрального (ПИ) регулятора 10, сигнал с выхода которого поступает на блок ограничения 11. Сигнал с выхода блока ограничения 11 поступает на первый вход сумматора сигналов задания момента 12, на второй вход блока 12 поступает корректирующий сигнал с выхода блока коррекции задания момента двигателя 15. Сигнал с выхода сумматора сигналов задания момента 12 поступает на вход формирователя задания модуля тока статора 13, с выхода которого задание на модуль тока статора поступает на амплитудный вход блока задания мгновенных значений тока статора 14, в котором формируются заданные мгновенные значения тока статора.
При разгоне двигателя его скорость ω2 меньше скорости задания  , и сигнал разности
, и сигнал разности  на выходе блока сравнения 8 не равен нулю, он поступает на вход ПИ-регулятора скорости 10, ограничивается блоком ограничения 11. Сигнал задания на момент двигателя проходит через сумматор 12, и дает задание блоку 13 на формирование величины модуля пускового тока статора.
на выходе блока сравнения 8 не равен нулю, он поступает на вход ПИ-регулятора скорости 10, ограничивается блоком ограничения 11. Сигнал задания на момент двигателя проходит через сумматор 12, и дает задание блоку 13 на формирование величины модуля пускового тока статора.
После окончания разгона двигателя в установившемся режиме при достижении заданной скорости, когда Δω становится равным нулю, сигнал на выходе ПИ-регулятора скорости 10 становится меньше порогового значения, установленного блоком ограничения 11, вследствие чего поступающий сигнал через сумматор 12 на блок 13 обеспечивает формирование модуля тока статора в соответствии с величиной нагрузки на валу двигателя.
Частота тока статора формируется следующим образом. С датчика скорости вращения ротора 5 поступает сигнал ω2 на первый вход блока ограничения сигнала частоты вращения ротора 22, на второй вход которого также поступает сигнал
с блока задания скорости 9, сигнал ωогр на выходе блока 22, поступающий на первый вход сумматора 23, определяется в соответствии с правилом

На второй вход сумматора 23 с блока 24 поступает сигнал задания разности частот вращения поля статора и ротора двигателя Δω, сумматор 23 проводит вычисление механической частоты вращения магнитного потока статора  в соответствии с формулой:
в соответствии с формулой:

Сигнал с выхода блока 24 поступает на вход пропорционального блока 25, осуществляющего пропорциональный перерасчет желаемой механической частоты вращения поля статора в электрическую частоту тока статора в соответствии с выражением

где pn - число пар полюсов.
Сигнал  с выхода блока 25 подается на частотный вход блока задания мгновенных значений тока статора 14, на амплитудный вход которого поступает сигнал задания на модуль тока статора
с выхода блока 25 подается на частотный вход блока задания мгновенных значений тока статора 14, на амплитудный вход которого поступает сигнал задания на модуль тока статора  , на выходе блока 14 формируются мгновенные значения фазных сигналов задания на ток статора, зависящие от времени t в соответствии с формулами:
, на выходе блока 14 формируются мгновенные значения фазных сигналов задания на ток статора, зависящие от времени t в соответствии с формулами:
Сформированные таким образом сигналы задания на фазные токи статора поступают на фазные входы положительной группы входов регулятора тока 6. На фазные входы отрицательной группы входов регулятора тока 6 поступают сигналы с датчиков тока 2, 3 и сумматора токов 7. В регуляторе тока 6 сравниваются заданные и измеренные значения фазных токов статора и формируются на шести выходах сигналы управления, подаваемые на шесть управляющих входов трехфазного инвертора 1.
Момент двигателя формируется и поддерживается на требуемом уровне путем поддержания на требуемом уровне амплитуды тока статора  , а также задания постоянной величины абсолютной разности между скоростями вращения поля статора и ротора Δω, при этом осуществляется коррекция задания момента двигателя, влияющего на амплитуду тока статора при отклонении угла между векторами тока статора и тока намагничивания от заданного значения. Момент асинхронного двигателя можно определить по формулам 3
, а также задания постоянной величины абсолютной разности между скоростями вращения поля статора и ротора Δω, при этом осуществляется коррекция задания момента двигателя, влияющего на амплитуду тока статора при отклонении угла между векторами тока статора и тока намагничивания от заданного значения. Момент асинхронного двигателя можно определить по формулам 3

где φ0 - угол между векторами тока статора  и тока намагничивания
и тока намагничивания  .
.

где Lm - взаимная индуктивность статора и ротора;  - приведенная индуктивность рассеяния ротора;
- приведенная индуктивность рассеяния ротора;  - приведенное активное сопротивление ротора.
- приведенное активное сопротивление ротора.
Момент двигателя при постоянном значении тока статора будет максимальным при задании блоком 24 оптимального значения сигнала Δωопт

Оптимальное значение угла между векторами тока статора и тока намагничивание составляет φопт=45°, при этом tgφопт=1.
Блок формирователя задания модуля тока статора 13 получает входной сигнал с выхода сумматора 12, производит формирование задания модуля тока статора в соответствии с формулой

и подает этот сигнал на амплитудный вход блока задания мгновенных значений тока статора 14.
Блок 18 вычисления тангенса угла φ0 работает следующим образом. На входы блока 18 поступают измеренные мгновенные значения фазных токов статора и ротора. На основании использования треугольника токов, приведенного на векторной диаграмме (Фиг.2), в соответствии с тригонометрическим соотношением

где ke - коэффициент трансформации двигателя.
Угол δ мал, поэтому можно принять cosδ≈1. Модули токов статора и ротора определяются на основании формул преобразования переменных трехфазной системы координат в двухфазную систему.



где kc - согласующий коэффициент пропорциональности, выбор которого осуществляется из условий инвариантности мощности реальной трехфазной машины и приведенной двухфазной машины  .
.
Учитывая известные соотношения между обратными тригонометрическими функциями

получим выражение тангенса угла φ0 в виде
На вход блока 15 с выхода блока сравнения 16 поступает разность

При неоптимальном значении угла φ0 сигнал Δtgφ0 от блока сравнения 16 поступает на вход блока 15, который вырабатывает корректирующий сигнал задания момента двигателя ΔM*, поступающий на сумматор 12. Если Δtgφ0<0, то происходит уменьшение сигнала коррекции задания момента двигателя ΔM* с шагом приращения ξ=0,0005Мн, пока угол φ0 не станет равным 45°, если Δtgφ0>0, то происходит увеличение сигнала коррекции задания момента двигателя ΔM* с шагом убывания ξ=0,0005, если Δ(tgφ0)=0, то значение задания на момент не изменяется. Считывание мгновенных значений tgφ0 и расчет Δtgφ0 происходит циклически с дискретностью, определяемой быстродействием системы.
Преимущество предлагаемого электропривода переменного тока заключается в минимизации тока статора, обеспечивающего заданный момент двигателя, за счет более простого и точного определения требуемого сигнала коррекции задания момента двигателя, выполняемого на основании сравнения заданного и вычисленного тангенса угла между векторами тока статора и тока намагничивания, определяемого с помощью измеренных мгновенных значений токов статора и ротора.
Источники информации
1. Патент РФ №2396696, МПК H02 27/04. Электропривод переменного тока. В.Н.Мещеряков, В.А.Корчагина. Опубл. 10.08.2010. Бюл. №22.
2. Патент РФ №2447573, МПК H02 27/04. Электропривод переменного тока. В.Н.Мещеряков, Зотов В.А., Мещерякова О.В. Опубл. 10.04.2012. Бюл. №10.
Электропривод переменного тока, содержащий трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум статорным обмоткам асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой статора напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулятора тока, выходы двух датчиков фазного тока статора соединены с входами сумматора фазных токов статора, а также соединены с двумя входами первой группы фазных входов блока ШИМ-регулятора тока, а также соединены с двумя входами первой группы фазных входов блока вычисления параметра взаимной ориентации между вектором тока статора и параметром намагничивания, выход сумматора фазных токов статора соединен с третьим входом первой группы фазных входов ШИМ-регулятора тока статора и с третьим входом первой группы фазных входов блока вычисления параметра взаимной ориентации между вектором тока статора и параметром намагничивания, датчик скорости, установленный на валу двигателя, выход которого соединен с отрицательным входом блока сравнения, положительный вход которого подключен к блоку задания скорости, а выход блока сравнения подключен к входу пропорционально-интегрального регулятора скорости, выход которого подключен к входу блока ограничения, выход которого подключен к первому входу сумматора сигналов задания момента, выход которого подключен к входу формирователя задания модуля тока статора, выход которого подключен к амплитудному входу блока задания мгновенных значений тока статора, три фазных выхода которого соединены с тремя фазными входами второй группы входов ШИМ-регулятора тока, выход блока расчета параметра взаимной ориентации между векторами тока статора и параметра намагничивания соединен с отрицательным входом блока сравнения параметра взаимной ориентации, положительный вход которого соединен с блоком задания параметра взаимной ориентации, а выход блока сравнения параметра взаимной ориентации подключен ко входу блока коррекции задания момента двигателя, выход которого подключен ко второму входу сумматора сигналов задания момента, выход пропорционального блока расчета электрической частоты соединен с частотным входом блока задания мгновенных значений тока статора, выход блока задания разности частот вращения поля статора и ротора двигателя соединен с первым входом сумматора цепи задания частоты, отличающийся тем, что асинхронный двигатель выполнен с фазным ротором, выход датчика скорости соединен с первым входом блока ограничения частоты, со вторым входом которого соединен выход блока задания скорости, а выход блока ограничения частоты соединен со вторым входом сумматора цепи задания частоты, выход которого соединен с входом пропорционального блока расчета электрической частоты, два фазных вывода ротора через датчики фазного тока ротора соединены в общую точку, к которой также напрямую подключен третий фазный вывод ротора, выходы двух датчиков фазного тока ротора соединены с входами сумматора фазных токов ротора, а также соединены с двумя входами второй группы фазных входов блока вычисления параметра взаимной ориентации между вектором тока статора и параметром намагничивания, выход сумматора фазных токов ротора соединен с третьим входом второй группы фазных входов блока вычисления параметра взаимной ориентации между вектором тока статора и параметром намагничивания, параметром намагничивания двигателя является намагничивающий ток, а параметром взаимной ориентации между векторами тока статора и параметром намагничивания является тангенс угла между векторами тока статора и намагничивающего тока.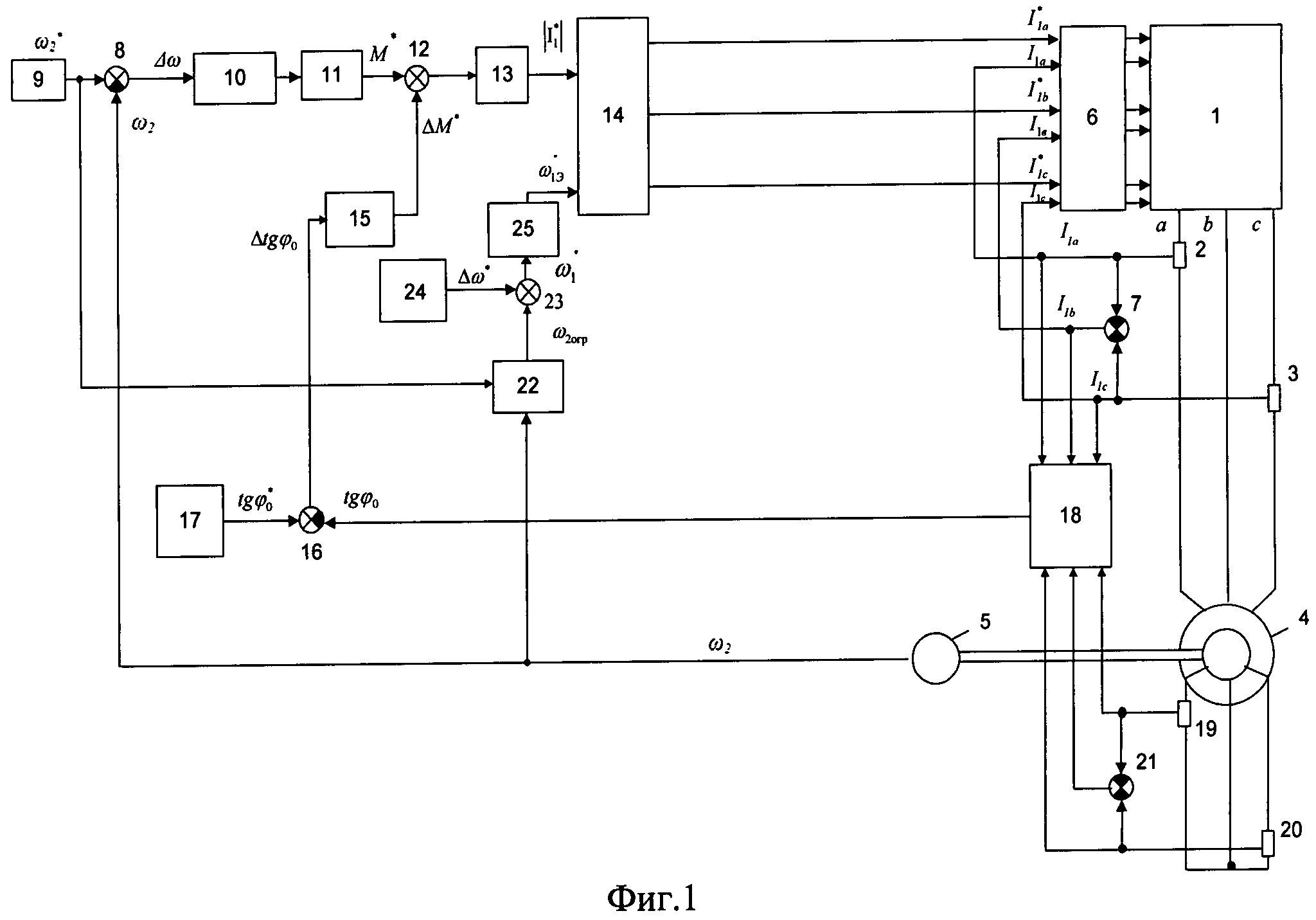
Двухдвигательный электропривод
Асинхронный вентильный каскад
Электропривод переменного тока
Устройство компенсации высших гармоник, адаптированное к электроприводу переменного тока
Термостат
Способ управления автономным асинхронным двигателем
Способ стабилизации частоты вращения синхронного двигателя
Электропривод переменного тока
Способ импульсного преобразования постоянного тока
Способ управления автономным асинхронным генератором
Двухдвигательный электропривод
Устройство отбора статического электричества
Электропривод переменного тока
Устройство компенсации высших гармоник, адаптированное к электроприводу переменного тока
Устройство отбора атмосферного электричества и защиты объектов от удара молнии
Устройство комплексного управления перетоками активной, реактивной мощности и ограничения токов короткого замыкания
Способ стабилизации частоты вращения синхронного двигателя

