Результат интеллектуальной деятельности: СПОСОБ КОРРЕКЦИИ ДРЕЙФА МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА, ИСПОЛЬЗУЕМОГО В СИСТЕМЕ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ
Вид РИД
Изобретение
Изобретение относится к области навигационного приборостроения для подвижных объектов различного назначения.
Уровень техники.
Существуют способы повышения эффективности пространственной ориентации операторов, управляющих движением подвижных объектов (автомобилей, водных и воздушных судов) с помощью систем дополненной реальности, состоящих из наголовного модуля, включающего прозрачные стереоочки или шлем дополненной реальности с прозрачными микродисплеями, систему позиционирования, обеспечивающую определение трех линейных координат положения точки наблюдения и трех угловых координат положения линии наблюдения в пространстве, и компьютера, в реальном времени генерирующего и передающего на микродисплеи видеоизображение виртуальных объектов, обозначающих траекторию движения и другую информацию по навигации и управлению. Примеры таких систем - шлем для пилотов истребителей-бомбардировщиков F-35 (http://www.vsi-hmcs.com/index.php/f-35-hmds); шлем Ebit Systems Targo Racer, используемый пилотами авиашоу Rocket Racing League (http://www.membrana.ru/articles/technic/2010/04/27/130400.html).
Для аналогичных целей могут применяться выпускаемые промышленностью очки дополненной реальности STAR 1200XL компании Vuzix, снабженные встроенной видеокамерой и датчиком ориентации, позволяющим определять три угловых координаты положения линии наблюдения в пространстве (reality/products star 1200xl.html), при этом данные о пространственном положении можно получать от спутниковой навигационной системы.
Используемые в подобных устройствах интегрированные микромеханические инерциальные датчики, включающие гироскопы, акселерометры и магнитометры, характеризуются значительным дрейфом данных гироскопов, достигающим значений до сотен градусов в час. Известны способы коррекции дрейфа гироскопов по углам крена и тангажа с помощью данных акселерометров, а по углу рыскания с помощью данных магнитометров посредством программно реализованного математического фильтра Калмана, как это делается, например, в выпускаемом промышленностью микромеханическом инерциальном датчике InertiaCube4 компании InterSense.
Недостатком способа коррекции дрейфа гироскопа по данным акселерометров и магнитометров является погрешность акселерометров и магнитометров, которая особенно для магнитометров может принимать большие и случайно изменяющиеся во времени значения из-за внешних магнитных влияний.
Известны способы коррекции дрейфа и калибровки гироскопов на движущихся объектах по данным спутниковых навигационных систем (RU 2462690, EP 1475609, EP 0934506), которые подразумевают неизменность ориентации инерциальных датчиков относительно движущегося объекта, на котором размещена приемная антенна спутниковой навигационной системы.
Недостатками известных способов коррекции дрейфа гироскопов на движущихся объектах по данным спутниковых навигационных систем в случае использования в составе систем дополненной реальности является неприменимость вследствие подвижности головы пользователя системы дополненной реальности относительно движущегося объекта, на котором находится пользователь, и координаты которого определяются спутниковой навигационной системой. В системах дополненной реальности критически важным является определение ориентации головы пользователя, поскольку эта информация используется для позиционирования изображений виртуальных объектов, выводимых на очки дополненной реальности.
В технологии дополненной реальности также известен способ позиционирования виртуальных объектов в реальной среде с помощью специальных надежно распознаваемых графических маркеров дополненной реальности - например, с помощью программной библиотеки ARToolKit (.Washington.edu/artoolkit/). Данная библиотека позволяет, в частности, определить положение камеры относительно графического маркера, представляющего собой четкое черно-белое изображение простых геометрических фигур.
Технической задачей создания предлагаемого изобретения является разработка способа коррекции дрейфа микромеханического гироскопа, используемого в системе дополненной реальности на движущемся объекте, по данным спутниковой навигационной системы и результатам распознавания образов графических маркеров дополненной реальности.
Наиболее близким к предлагаемому изобретению является интегрированная инерциально-спутниковая система ориентации и навигации, предложенная в заявке RU 2462690, которая подразумевает размещение на движущемся объекте двух разнесенных на расстояние нескольких метров антенн спутниковой навигационной системы. В случае использования в составе системы дополненной реальности данная система неприменима из-за невозможности размещения на голове пользователя системы дополненной реальности громоздких устройств, обеспечивающих разнесение антенн спутниковой навигационной системы, а также вследствие подвижности головы пользователя относительно движущегося объекта.
Раскрытие изобретения
Технический результат предлагаемого изобретения состоит в повышение точности пространственной ориентации посредством микромеханических гироскопов за счет коррекции их дрейфа с помощью данных спутниковой навигационной системы и оптического распознавания маркеров дополненной реальности.
Указанный технический результат достигается тем, что способ коррекции дрейфа микромеханического гироскопа, используемого в системе дополненной реальности на движущемся объекте, состоит в том, что при движении объекта (например, воздушного или морского судна, автомобиля), на котором находится пользователь системы дополненной реальности, включающей очки дополненной реальности со встроенными микромеханическим гироскопом и видеокамерой, посредством математического аппарата линейного регрессионного анализа (Львовский Е.Н. Статистические методы построения эмпирических формул. Учебник для вузов. -М.: Высшая школа, 1988) по данным бортового приемника спутниковой навигационной системы строится трехмерный вектор направления движения объекта. Объем обрабатываемых при регрессионном анализе данных о линейных координатах варьируется и зависит от скорости движущегося объекта. При обнаружении участка прямолинейного движения по признаку неизменности параметров линейной регрессии производится коррекция угловых координат головы пользователя очков дополненной реальности, вырабатываемых по данным микромеханического гироскопа, приводящая угловые координаты головы пользователя по углам рыскания и тангажа к угловым координатам текущего вектора движения объекта с учетом смещения ориентации головы пользователя относительно движущегося объекта, определяемого с помощью оптического распознавания маркеров дополненной реальности (см. фиг.1), неподвижно размещаемых на движущемся объекте, например в пилотской кабине воздушного судна. Маркеры располагаются таким образом, чтобы хотя бы один из них обязательно попадал в поле зрения видеокамеры, встроенной в очки дополненной реальности. Обеспечивается подсветка маркеров, делающая их видимыми для видеокамеры в любое время суток. Выработка параметров ориентации головы пользователя по данным оптического распознавания графических маркеров дополненной реальности осуществляется с помощью свободно доступных на рынке программных пакетов дополненной реальности, например пакета ARToolKit компании ARToolworks Inc.
Фиг.1 - техническая реализация способа коррекции дрейфа микромеханического гироскопа, используемого в системе дополненной реальности на движущемся объекте.
Осуществление изобретения.
Осуществление предлагаемого способа коррекции дрейфа микромеханического гироскопа, используемого в системе дополненной реальности на движущемся объекте, заключается в следующем.
Система, осуществляющая предлагаемый способ (см. фиг.1), включает размещенные на борту движущегося объекта компьютер, приемник спутниковой системы навигации, очки дополненной реальности, имеющие встроенный микромеханический гироскоп и миниатюрную видеокамеру, три маркера дополненной реальности, представляющие собой четкие изображения трех различных геометрических фигур. Средние размеры маркеров 7×7 см, размеры графических маркеров могут варьироваться в зависимости от типа используемой видеокамеры и их удаления от пользователя. Маркеры могут быть нанесены либо непосредственно на плоские поверхности кабины движущегося объекта, либо на промежуточный носитель (бумага, липкая пленка, пластина из тонкого пластика) с последующим размещением в кабине движущегося объекта. Маркеры размещаются таким образом, чтобы при любом положении головы пользователя хотя бы один маркер попадал в поле зрения видеокамеры, встроенной в очки дополненной реальности, это условие определяет необходимость использования трех маркеров. Обеспечивается подсветка маркеров, делающих их видимыми для видеокамеры в любое время суток. Информация о точках размещения маркеров на движущемся объекте вводится в бортовой компьютер.
В бортовой компьютер поступают данные об изменяющихся линейных координатах движущегося объекта от приемника спутниковой системы навигации, данные гироскопа и видеокартинка от видеокамеры, встроенной в очки дополненной реальности. Компьютер посредством линейного регрессионного анализа постоянно вычисляет угловые координаты вектора направления движения объекта по линейным координатам от приемника системы спутниковой навигации. Также компьютер постоянно вычисляет угловые координаты головы пользователя относительно маркеров дополненной реальности по видеокартинке от видеокамеры и угловые координаты головы пользователя по данным от микромеханического гироскопа. При обнаружении прямолинейного участка движения объекта по признаку неизменности угловых координат вектора движущегося объекта производится коррекция угловых координат (углы рыскания и тангажа) по данным гироскопа путем приведения их к угловым координатам вектора движения объекта с учетом углового смещения головы пользователя относительно движущегося объекта.
Для осуществления изобретения может быть использован автономный мобильный компьютер, имеющий карманные размеры. Очки смешанной реальности представляют собой прозрачные стекла, либо проекторы изображения на сетчатку глаза, которые выводят стереопару трехмерных объемных изображений виртуальных объектов, сформированных компьютером. В качестве прозрачных очков смешанной реальности могут быть использованы соответствующие очки, выпускаемые промышленностью, например, STAR 1200XL компании Vuzix, снабженные микромеханическим инерциальным датчиком и миниатюрной видеокамерой. Линейные координаты точки наблюдения можно получать, используя компактный приемник глобальных навигационных систем повышенной точности GLONASS/GPS/SBAS (например, Garmin GTN 625).
Способ коррекции дрейфа микромеханического гироскопа состоит в том, что при движении объекта, на котором находится пользователь системы дополненной реальности, включающей очки дополненной реальности со встроенными видеокамерой и микромеханическим гироскопом, по данным которого вырабатываются угловые координаты головы пользователя, и бортовой приемник спутниковой навигационной системы, отличающийся тем, что по данным спутниковой навигационной системы строится трехмерный вектор направления движения объекта, последовательные значения которого анализируются бортовым вычислителем с помощью математического метода регрессионного анализа и при выявлении участка прямолинейного движения по признаку неизменности параметров линейной регрессии производится коррекция угловых координат головы пользователя по углам рыскания и тангажа, приводящая их к угловым координатам текущего вектора движения объекта с учетом смещения ориентации головы пользователя относительно движущегося объекта, определяемого с помощью оптического распознавания маркеров дополненной реальности, неподвижно размещенных на движущемся объекте в поле зрения видеокамеры.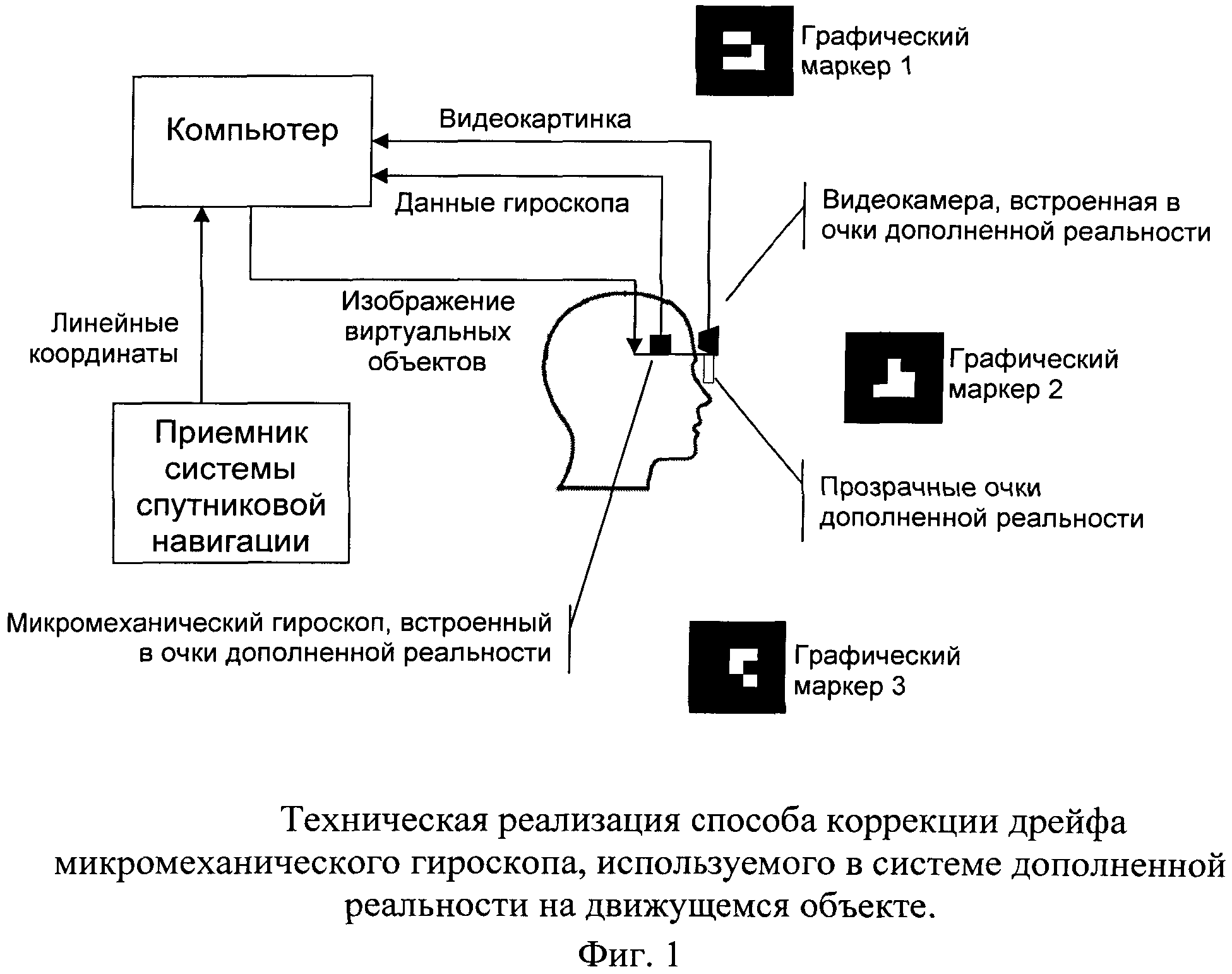
Способ обучения авиадиспетчеров диспетчерских пунктов руления, старта и посадки на реальном летном поле
Способ обучения сотрудников службы авиационной безопасности с применением системы дополненной реальности
Способ пространственной ориентации пилотов воздушных судов при посадке
Способ формирования изображения дополненной реальности, обеспечивающий корректное восприятие удаления виртуальных объектов
Способ предполетной навигации авиапассажиров в аэропорте
Способ формирования изображения дополненной реальности, обеспечивающий совпадение визуальных характеристик реальных и виртуальных объектов
Система формирования координат воздушного судна в условиях неполной и неточной навигационной информации
Способ обучения авиадиспетчеров диспетчерских пунктов руления, старта и посадки на реальном летном поле
Способ обучения сотрудников службы авиационной безопасности с применением системы дополненной реальности
Способ пространственной ориентации пилотов воздушных судов при посадке
Способ формирования изображения дополненной реальности, обеспечивающий корректное восприятие удаления виртуальных объектов
Способ предполетной навигации авиапассажиров в аэропорте
Способ формирования изображения дополненной реальности, обеспечивающий совпадение визуальных характеристик реальных и виртуальных объектов
Система формирования координат воздушного судна в условиях неполной и неточной навигационной информации

