Результат интеллектуальной деятельности: АНАЛИЗАТОР ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА
Вид РИД
Изобретение
Изобретение относится к железнодорожному транспорту, в частности к устройствам для индикации параметров движения локомотива. Известен «Блок бесплатформенной системы ориентации и система визуализации и регистрации движения подвижных объектов» (патент RU 2336496, G01C 021/10, 2007). Устройство содержит микроконтроллер, интерфейсную плату и три измерительных блока, каждый из которых содержит микромеханический гироскоп и акселерометр, а также вычислитель, блок системы сбора и передачи данных, средства визуализации и регистрации.
Наиболее близким из известных по технической сущности является «Анализатор режимов транспортного средства (патент РФ №2192668, 2002 г.)», выбранный в качестве прототипа.
Указанный анализатор, кроме измерителя аэровлияний и канала сложности трассы, содержит соединенные между собой: многопараметрический блок информации, сумматор, делитель и датчики, один из которых представлен датчиком направления трассы, в виде гироскопа, и соединенные между собой: генератор тактов, синхронизатор и память.
К недостаткам известного устройства следует отнести наличие методической погрешности измерения скорости и расстояния, так как датчик преодоленного пути кинематически связан с колесной парой, способной при движении проскальзывать относительно рельса, кроме того, диаметр катания ее колес подвержен износу, что случайным образом уменьшает мерную длину окружности.
Сущность технического решения представлена двумя гироскопами, закрепленными на разных штатных тележках колесных пар локомотива, соединенных с блоком логики, имеющим элементы И и ИЛИ, управляющим посредством синхронизатора долговременной трехканальной памятью, акселерометрами и формирователем, соединенными через два программируемых вычислителя со входами двустрочных индикаторов расстояния, скорости и хронологии соответственно.
Технический результат состоит в повышении точности определения местонахождения локомотива и соблюдении расписания движения. Заявленная совокупность существенных признаков находится в причинно-следственной связи с достигаемым техническим результатом.
Изобретение является промышленно применимым, потому что выполнено на основе широко известных, существующих прогрессивных технических средств.
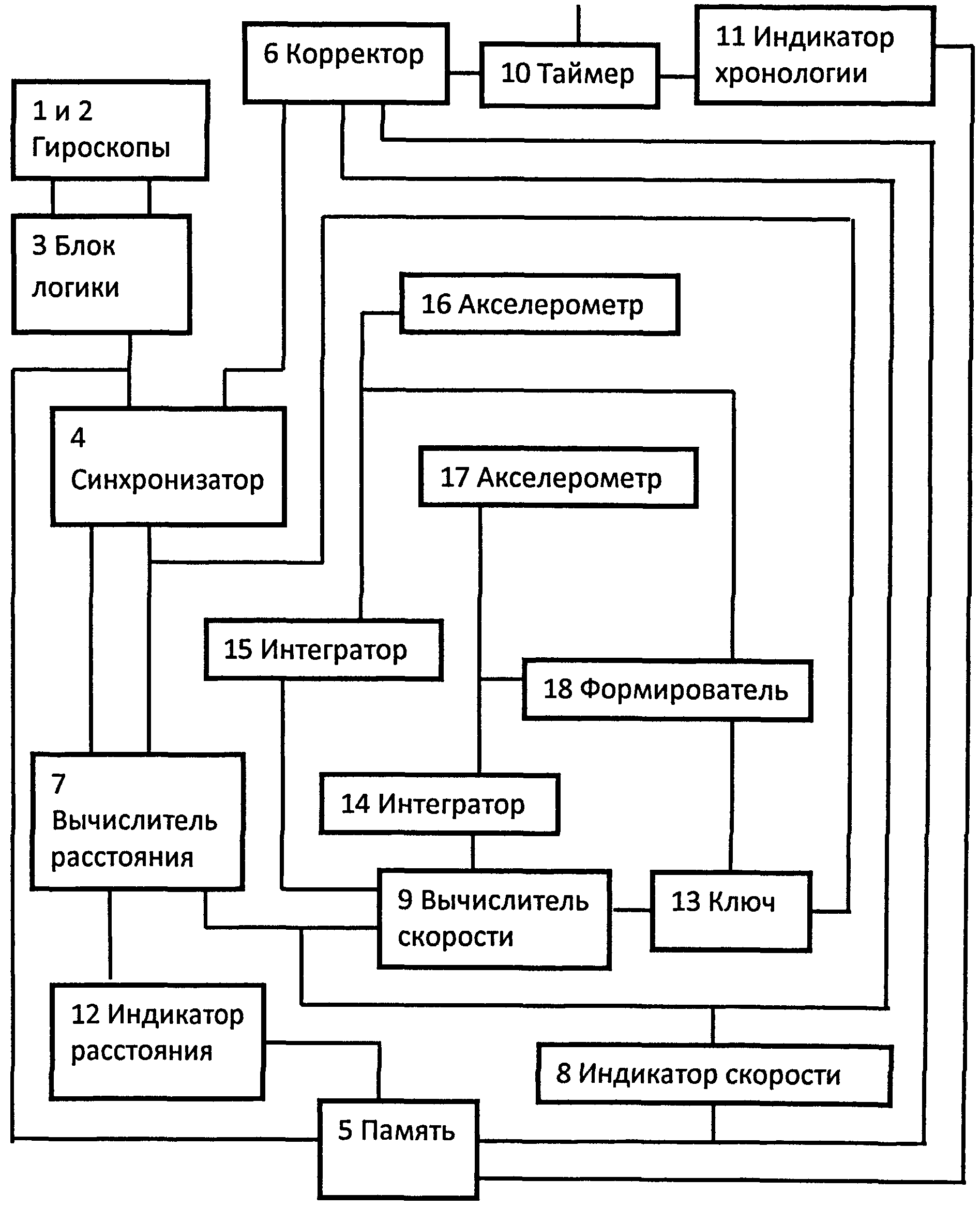
На фигуре 1 приведена блок-схема анализатора параметров движения локомотива.
Анализатор параметров движения локомотива имеет два инерциальных датчика измерения курса 1 и 2, которые выполнены в виде гироскопов. Гироскопы имеют по два выхода соответственно каждому из ортогональных измерений курса, а именно уклонов (тангажа) и поворотов (рыскания). Каждый датчик измерения курса закреплен на отдельной тележке локомотива. Выходы гироскопов соединены с блоком логики 3. Блок логики 3 имеет две двухвходовых схемы И, выходы которых объединены схемой ИЛИ. Входы одной схемы И соединены с выходами поворотов (рыскания) каждого из датчиков измерений курса. Входы другой схемы И соединены с выходами уклонов (тангажа) каждого из датчиков измерений курса (гироскопов).
Выход блока логики 3 соединен параллельно с первым входом управляемого синхронизатора 4 и со считывающим входом долговременной памяти 5, имеющей многоканальную структуру для считывания цифровых данных, например, в виде триад. Управляемый синхронизатор 4 выполнен, например, в виде кольцевого счетчика на заранее заданное максимальное число импульсов для участка обращения локомотива, повторяемых циклически, как правило, многократно, последовательность которых совместно определяет некоторый временной интервал. В обратную связь кольцевого счетчика введена логическая схема ИЛИ, соединенная через первый вход с блоком логики 3.
Второй вход регулируемого синхронизатора 4 подключен к выходу корректора 6, первый вход которого соединен параллельно с первыми входами программного вычислителя расстояний 7, двустрочного цифрового индикатора скорости 8 и с выходом программного вычислителя средней скорости 9. Второй вход корректора 6 соединен параллельно с первым выходом упомянутой долговременной памяти 5 и вторым входом двустрочного цифрового индикатора скорости 8. Третий вход корректора 6 соединен с выходом управляемого таймера 10. Корректор 6 имеет два делителя. Регистр делимого одного из них соединен с выходом долговременной памяти 5, а регистр делителя соединен с выходом программируемого вычислителя средней скорости 9, при этом выход частного соединен с регистром делителя частоты. Регистр делимого второго делителя соединен с таймером 10 и выход частного является выходом корректора 6.
Управляемый таймер 10 вторым выходом соединен с первым входом двустрочного цифрового индикатора хронологии 11. Второй вход двустрочного индикатора хронологии 11 соединен со вторым выходом долговременной памяти 5. Третий выход долговременной памяти 5 соединен с первым входом двустрочного цифрового индикатора расстояния 12, второй вход которого соединен с выходом программного вычислителя расстояний 7.
Первый выход управляемого синхронизатора 4 соединен со вторым входом программного вычислителя расстояния 7. Программный вычислитель расстояния 7 работает по принципу калькулятора и выполняет встроенные функции: отсчета (формирования) сомножителя, умножения и суммирования, имеет схему управления и, по крайней мере, два регистра, первый из которых предназначен для хранения предыдущего значения, а другой использован для запрограммированных (встроенных) указанных текущих арифметических операций.
Второй выход управляемого синхронизатора 4 соединен параллельно с третьим входом программного вычислителя расстояния 7 и с первым входом ключа 13, выполненного в виде логической схемы И, например диодной. Выход ключа 13 соединен с первым входом программного вычислителя средней скорости 9. Второй его вход, например суммирования, программного вычислителя средней скорости 9 соединен с выходом интегратора 14. Третий вход, например вычитания, программного вычислителя скорости 9 соединен с выходом интегратора 15. Оба интегратора преимущественно имеют входы аналогового типа, например, в виде RC-цепи, в том числе с операционным усилителем.
Программный вычислитель средней скорости 9 работает по принципу калькулятора и выполняет встроенные функции: суммирования или вычитания и деления одного из результатов на число 2. Он имеет схему управления и, по крайней мере, два регистра, первый из которых предназначен для хранения предыдущего значения, а другой использован для запрограммированных (встроенных) указанных текущих арифметических операций.
Входы интеграторов 14 и 15 соединены с выходами двух инерциальных датчиков, в частности акселерометров 16 и 17, например аналоговых, и параллельно с двумя входами формирователя 18, выполненного, например, в виде логической двухвходовой диодной схемы ИЛИ.
Инерциальные датчики 16 и 17 закреплены на локомотиве встречно, то есть один попутно движению, а другой наоборот. Выход формирователя 18 соединен с управляющим входом ключа 13, выполненного, например, в виде диодной логической двухвходовой схемы И.
Анализатор работает следующим образом.
Акселерометры 16 и 17, ориентированные в разные стороны относительно движения, вырабатывают сигналы ускорения (возрастающего, равномерного или убывающего), например, в аналоговой форме. Режим разгона поезда (локомотива с составом) обычно устанавливают после стоянки, окончания кривой, на спуске, на площадке, после проверки тормозов и окончания нейтральной вставки на контактной сети или ограничения скорости. Перед станциями, на подъемах и в некоторых иных случаях возможно замедление поезда. Разгон или замедление отражаются на величине ускорения процесса. При равномерной скорости ускорение имеет нулевое значение.
Если один из акселерометров вырабатывает сигнал ускорения, например, при разгоне, то другой акселерометр, ориентированный на измерение обратного воздействия, никакого сигнала не вырабатывает. Сигнал ускорения поступает по одной из параллельных цепей на формирователь 18, например, диодного типа.
После формирователя 18 сигналы (разгон или замедление), например выпрямленные, передаются на вход ключа 13, выполненного по схеме логического И, например, диодного типа, и подготавливают его к открытию.
От одного из двух акселерометров 16 или 17 сигнал ускорения поступает на соответственный интегратор 14 или 15, например, аналогового типа (считающегося простым, но достаточно точным). После интегрирования сигнал соответствует значениям текущей скорости.
Числовые значения ускорений поступают на вход программируемого вычислителя средней скорости 9, и если его программа активирована, то начинается расчет среднего значения. Для вычисления возрастающего среднего значения автоматически выполняется суммирование предыдущего с текущим значением и, затем, деление на число два. Для вычисления уменьшающего среднего значения автоматически выполняется вычитание текущего значения из предыдущего и затем деление на число два.
Управление программой арифметических действий осуществляет управляемый синхронизатор 4 через ключ 13, который закрывается автоматически на этапах движения с равномерной скоростью, то есть, когда ускорение равно нулю, что предусмотрено для исключения искажений расчета среднего значения.
Интервалы вычислений задаются кольцевым счетчиком управляемого синхронизатора 4. Частное от деления является средней скоростью за интервал и передается параллельно в регистр индикатора скорости 8 и в программируемый вычислитель расстояния 7. На период отключения программируемого вычислителя средней скорости в его регистре сохраняется последнее ее значение.
Программируемый вычислитель расстояния 7, работающий по принципу (функции) калькулятора, выполняет расчет приращений расстояния, обозначенных предыдущей и текущей командами, поступающими с выхода управляемого синхронизатора 4. Приращение расстояния определяется умножением средней скорости на число импульсов, заданное управляемым синхронизатором 4 с учетом предыдущего пересчета корректором 6.
Рассчитанное произведение поступает в регистр текущего значения сумматора программируемого вычислителя расстояния 7 в качестве одного из слагаемых. Другим слагаемым является предыдущее значение, сохраненное в отдельном его регистре.
При вынужденно малой скорости, не предусмотренной заданием на процесс, управляемый синхронизатор 4 автоматически посредством корректора 6 с двухкаскадным делением уменьшает частоту управляющих импульсов. Корректор 6 работает от управляемого таймера 10 на рабочей частоте, которая установлена на 10-15 процентов меньшей, чем частота отсчета естественного времени. Частота управляющих импульсов в редких случаях может быть увеличена, если отношение скоростей окажется меньше единицы. Управляемый таймер 10 предусмотрено отключать на период стоянок, что позволяет определять фактическое время движения поезда.
Рабочая частота кратно уменьшается делителем в отношении, полученном от деления заданной скорости на текущую скорость, которое выполняет другой делитель корректора 6. Обычно при делении отношение скоростей получается более единицы.
Управляемый синхронизатор 4 выполнен, например, в виде кольцевого счетчика на заранее заданное максимальное число импульсов, повторяемых циклически, как правило, многократно, последовательность которых совместно определяет некоторый временной интервал. Временной интервал и максимальное число импульсов (обычно, по числу пикетов) выбирают заранее, например около 2-3 десятков, при формировании долговременной памяти в соответствии с периодом преодоления максимально длинного элемента профиля на заданной скорости. Блок логики 3 при выявлении момента смены элементов профиля любой меньшей длины, чем максимальная, через логическую схему ИЛИ, включенную в обратную связь кольцевого счетчика, автоматически возвращает его на начала цикла.
Кроме команд смены участков профиля блок логики 3 считывает из долговременной памяти 5 триаду заданных значений: средней скорости на элементе профиля, преодоленного расстояния и времени движения, которые передаются в отдельные регистры индикаторов 8, 12 и 11. В долговременную память 5 полезно внести местоположения участков проверки тормозов, нейтральных вставок и других обязательных особенностей технологии процесса движения поезда, информация о которых может оказаться полезной при анализе процесса.
Размещение гироскопов на разных штатных тележках колесных пар локомотива позволило совместно с логической схемой И блока логики 3 исключить методическую ошибку, вносимую при движении локомотива по стрелочным переводам. Так, если передняя тележка на стрелочном переводе отклонилась от прямого пути, то первый гироскоп выдаст команду о начале кривой.
Затем эта тележка после стрелочного перевода отклоняется обратно на участок прямого пути, и первый гироскоп выдаст команду о начале кривой в другую сторону. Пара этих одиночных команд не влияет на работу анализатора, так как автоматически исключается логической схемой И. Подобные ошибочные команды другого гироскопа (на соседней тележке) исключены таким же образом. Так, вторая тележка со стрелочным переводом совмещается позже, и, следовательно, ее гироскоп то же выдаст команду о начале кривой (третью). Затем аналогично возникает четвертая команда. В каждой таком случае ошибочные команды о кривых разнесены во времени. Логические схемы И исключают команды о кривых, смещенных во времени. Однако при нахождении обоих тележек на кривой одного радиуса, за пределами стрелочных переводов, оба гироскопа выдают команды одного знака. Двухвходовая логическая схема И блока логики 3 по таким парам измерений кривых образует объективную команду, пригодную для функционирования управляемого синхронизатора 4.
В долговременной памяти 5 кроме команд, управляющих считыванием, предусмотрено, по крайней мере, три канала: времени движения, средней скорости на элементе профиля и преодоленного расстояния.
В моменты появления визуализации в строках «заданное» на цифровых индикаторах 8, 11 и 12 имеется возможность зрительно сопоставить значения в строках «текущее», то есть по средней скорости на элементе профиля, времени движения и преодоленного расстояния, которые вводятся эпизодически и позволяют использовать выводы о совпадении или разнице в качестве рекомендаций по выполнению процесса движения, следовательно, расписания.
Технический эффект выражается в повышении точности определения местонахождения локомотива и соблюдения расписания движения.
Точность местонахождения отслеживается непосредственной фиксацией конструктивных особенностей пути движения гироскопами, исключая необходимость какого-либо дополнительного продольного обустройства трассы. Принцип периодического измерения ускорения акселерометрами исключает накопление ошибки и упрощает соблюдение заданных параметров движения поезда, что способствует соблюдению расписания движения.
Боковая рама тележки грузового вагона
Соединение буксы с боковой рамой тележки грузового вагона
Боковая рама тележки грузового вагона
Соединение буксы с боковой рамой тележки грузового вагона

