Результат интеллектуальной деятельности: ГИРОКОМПАС
Вид РИД
Изобретение
Изобретение относится к гироскопическим приборам для навигации, геодезии, измерения азимута на земной поверхности.
Известен автоматический гирокомпас (см. заявку RU 2002135184, МПК G01C 19/38, опубл. 10.08.2004 г.), принятый за прототип. Автоматический гирокомпас содержит корпус, установленный на наклонно-поворотном столе, размещенный в корпусе блок чувствительных элементов (БЧЭ), имеющий в своем составе датчик угловой скорости и датчики горизонта, систему разворота БЧЭ вокруг вертикальной оси, включающую задатчик разворота и привод, блок сервисной электроники и вычислительное устройство. На корпусе расположены индикаторы негоризонтальности БЧЭ, электрически связанные через блок сервисной электроники с выходами датчиков горизонта.
Недостатками устройства, принятого за прототип, являются:
- высокая сложность и трудоемкость изготовления устройства;
- высокие габариты и масса;
- недостаточная точность получаемых оценочных показателей.
Предлагаемым изобретением решается задача по минимизации материальных и временных затрат при создании инерциальных навигационных устройств.
Технический результат, получаемый при осуществлении изобретения, заключается в создании с минимальными затратами измерительного прибора, предназначенного для использования в различных областях техники с целью измерения, контроля угловой скорости вращения и углового положения в инерциальном пространстве.
Указанный технический результат достигается тем, что в предлагаемом гирокомпасе, содержащем корпус, поворотный стол, блок чувствительных элементов (БЧЭ), имеющий в своем составе датчик угловой скорости и датчики горизонта (акселерометры), систему разворота БЧЭ вокруг вертикальной оси, включающую задатчик разворота и привод, блок сервисной электроники и вычислительное устройство, новым является то, что корпус выполнен с возможностью вращения на своей оси, которая установлена на упорном подшипнике и зафиксирована в вертикально расположенном полом валу червячного редуктора, входной вал которого связан с приводным шаговым двигателем, корпус связан с внешней рамкой, установленной с возможностью качания в подшипниках, зафиксированных в корпусе, внешняя рамка в свою очередь связана с внутренней рамкой, установленной с возможностью качания в перпендикулярном направлении в подшипниках, зафиксированных во внешней рамке, на внутренней рамке, по оси качания, размещена первая вертикальная стойка с закрепленным на ней одноосным измерителем угловой скорости, представляющем собой волоконно-оптический гироскоп (ВОГ) с замкнутым контуром обратной связи, на корпусе выполнена вторая вертикальная стойка с установленным на ней линейным шаговым двигателем, ходовой винт которого через тягу связан с внешней рамкой, на внешней рамке выполнена третья вертикальная стойка с установленным на ней линейным шаговым двигателем, ходовой винт которого через тягу связан с внутренней рамкой, первый акселерометр установлен в нижней части первой стойки, жестко связанной с внутренней рамкой, а на кронштейне, расположенном снизу внешней рамки, перпендикулярно первому акселерометру расположен второй акселерометр.
Выполнение корпуса с возможностью вращения позволяет:
- выполнять поворот волоконно-оптического гироскопа на 360° вокруг своей оси;
- уменьшить массо-габаритные показатели;
- снизить конструктивную сложность гирокомпаса в целом.
Установка оси корпуса на упорном подшипнике и зафиксирована в вертикально расположенном полом валу червячного редуктора, входной вал которого связан с приводным шаговым двигателем, позволяет:
- обеспечить необходимую устойчивость корпуса со всеми установленными на нем элементами;
- обойтись без установки дополнительных подшипниковых узлов;
- добиться высокой степени компактности гирокомпаса;
- получить высокую степень точности отработки углового положения.
Выполнение связи корпуса с внешней рамкой, установленной с возможностью качания в подшипниках, зафиксированных в корпусе, а внешней рамки с внутренней рамкой, установленной с возможностью качания в перпендикулярном направлении в подшипниках, зафиксированных во внешней рамке, позволяет обеспечить получение положения волоконно-оптического гироскопа, соответствующего положению линии горизонта.
Размещение на внутренней рамке по оси качания первой вертикальной стойки с закрепленным на ней одноосным измерителем угловой скорости, представляющий собой волоконно-оптический гироскоп (ВОГ) с замкнутым контуром обратной связи, позволяет:
- установить датчик угловой скорости, имеющий несколько степеней свободы;
- проводить измерение и контроль угловой скорости вращения в инерциальном пространстве;
- проводить измерения как в стационарном положении гирокомпаса, так при установке его на подвижном объекте.
Выполнение на корпусе второй вертикальной стойки с установленным на ней линейным шаговым двигателем, ходовой винт которого через тягу связан с внешней рамкой, позволяет:
- выставить посредством перемещения ходового винта внешнюю рамку в горизонтальное положение;
- обеспечить требуемую точность горизонтального положения внешней рамки;
- обеспечить необходимый рабочий угол поворота внешней рамки.
Выполнение на внешней рамке третьей вертикальной стойки с установленным на ней линейным шаговым двигателем, ходовой винт которого через тягу связан с внутренней рамкой, позволяет:
- выставить посредством перемещения ходового винта внутреннюю рамку в горизонтальное положение;
- обеспечить требуемую точность горизонтального положения внутренней рамки;
- обеспечить необходимый рабочий угол поворота внутренней рамки;
- обеспечить за счет изменения углового положения внутренней и внешней рамок вертикальное положение первая стойка с закрепленным на ней одноосным измерителем угловой скорости, представляющий собой волоконно-оптический гироскоп (ВОГ).
Установка первого акселерометра в нижней части первой стойки, жестко связанной с внутренней рамкой, а на кронштейне, расположенном снизу внешней рамки, перпендикулярно первому акселерометру - второго акселерометра, позволяет отгоризонтировать с высокой точностью внутреннюю рамку, на которой установлена вертикальная стойка с волоконно-оптическим гироскопом.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
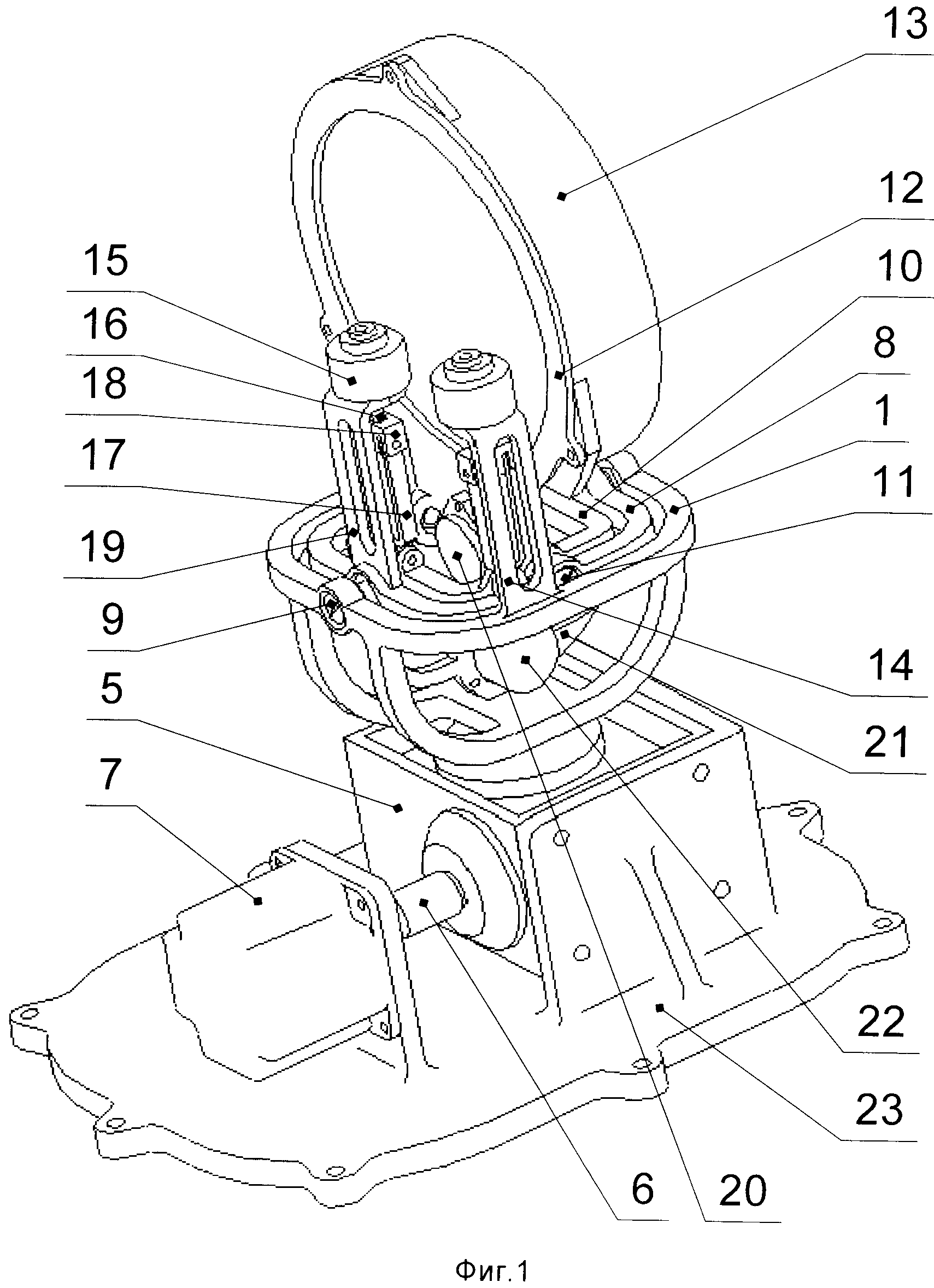
Сущность изобретения поясняется чертежами, где на фиг.1 показан общий вид гирокомпаса; на фиг.2 - схема установки оси корпуса в выходном полом валу редуктора.
Гирокомпас содержит корпус 1, выполненный с возможностью вращения на своей оси 2, которая установлена на упорном подшипнике 3 и зафиксирована в вертикально расположенном полом валу 4 червячного редуктора 5, входной вал 6 которого связан с приводным шаговым двигателем 7. Корпус 1 связан с внешней рамкой 8, установленной с возможностью качания в подшипниках 9, зафиксированных в корпусе 1. Внешняя рамка 8 в свою очередь связана с внутренней рамкой 10, установленной с возможностью качания в перпендикулярном направлении в подшипниках 11, зафиксированных во внешней рамке 8. На внутренней рамке 10 по оси качания размещена первая вертикальная стойка 12 с закрепленным на ней одноосным измерителем угловой скорости, представляющий собой волоконно-оптический гироскоп (ВОГ) 13 с замкнутым контуром обратной связи. На корпусе 1 выполнена вторая вертикальная стойка 14 с установленным на ней линейным шаговым двигателем 15, ходовой винт 16 которого через тягу 17, имеющей гайку 18, связан с внешней рамкой 8. На внешней рамке 8 выполнена третья вертикальная стойка 19 с установленным на ней аналогичным линейным шаговым двигателем 15, ходовой винт 16 которого через тягу 17 с гайкой 18 связан с внутренней рамкой 10. Первый акселерометр 20 установлен в нижней части первой стойки 12, жестко связанной с внутренней рамкой 10. На кронштейне 21, расположенном снизу внешней рамки 8, перпендикулярно первому акселерометру 20 расположен второй акселерометр 22. Вся конструкция размещается на плите 23.
Гирокомпас функционирует следующим образом. Работа гирокомпаса проводится в выносном варианте после позиционирования его на местности или после полной остановки подвижного объекта и выключения маршевого двигателя. Перед началом работы необходимо провести работы по предварительному ориентированию гирокомпаса (здесь не рассматриваются). Далее необходимо отгоризонтировать гирокомпас. Горизонтирование гирокомпаса происходит за счет перемещения ходовых винтов 16 после включения шаговых двигателей 15. Угол шага - 7,5°, который преобразуется в 0,0417 мм линейного перемещения. При перемещении гаек 18 по ходовым винтам 16 происходит перемещение тяг 17, приводящее к изменению углового положения внутренней 10 и внешней 8 рамок. Рассогласование углового положения отрабатывается датчиками горизонта - акселерометами 20 и 22. После выхода акселерометров 20 и 22 и соответсвенно внутренней 10 и внешней рамки 8 в линию горизонта, первая стойка 12 с закрепленным на ней одноосным измерителем угловой скорости, представляющем собой волоконно-оптический гироскоп (ВОГ) 13, оказывается в строго вертикальном положении, которое для него является рабочим. Далее производится определение истинного азимута. Основным элементом для определения истинного азимута является ВОГ 13, обладающий высокой устойчивостью к электромагнитным помехам, механическим и температурным возмущениям. ВОГ 13 предназначен для измерения и контроля угловой скорости вращения Земли в инерциальном пространстве (здесь не рассматривается). Величина и знак угловой скорости передаются в виде 32-х разрядного числа с плавающей запятой, типа float, через асинхронный последовательный гальванически развязанный интерфейс RS-485. Диапазон измеряемой угловой скорости ±90°/с. При повороте первой стойки 12 вокруг своей оси 2, которая установлена на упорном подшипнике 3 и зафиксирована в вертикально расположенном полом валу 4 червячного редуктора 5, подключенный к компьютерной системе ВОГ 13 через асинхронный последовательный гальванически развязанный интерфейс RS-485 выдает данные своего углового положения. Вращение на червячный редуктор 5 передается от шагового двигателя 7. Основной угловой шаг двигателя - 1,6°.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании с минимальными затратами измерительного прибора, предназначенного для использования в различных областях техники с целью измерения, контроля угловой скорости вращения и углового положения в инерциальном пространстве.
Гирокомпас, содержащий корпус, поворотный стол, блок чувствительных элементов (БЧЭ), имеющий в своем составе датчик угловой скорости и датчики горизонта (акселерометры), систему разворота БЧЭ вокруг вертикальной оси, включающую задатчик разворота и привод, блок сервисной электроники и вычислительное устройство, отличающийся тем, что корпус выполнен с возможностью вращения на своей оси, которая установлена на упорном подшипнике и зафиксирована в вертикально расположенном полом валу червячного редуктора, входной вал которого связан с приводным шаговым двигателем, корпус связан с внешней рамкой, установленной с возможностью качания в подшипниках, зафиксированных в корпусе, внешняя рамка в свою очередь связана с внутренней рамкой, установленной с возможностью качания в перпендикулярном направлении в подшипниках, зафиксированных во внешней рамке, на внутренней рамке по оси качания размещена первая вертикальная стойка с закрепленным на ней одноосным измерителем угловой скорости, представляющем собой волоконно-оптический гироскоп (ВОГ) с замкнутым контуром обратной связи, на корпусе выполнена вторая вертикальная стойка с установленным на ней линейным шаговым двигателем, ходовой винт которого через тягу связан с внешней рамкой, на внешней рамке выполнена третья вертикальная стойка с установленным на ней линейным шаговым двигателем, ходовой винт которого через тягу связан с внутренней рамкой, первый акселерометр установлен в нижней части первой стойки, жестко связанной с внутренней рамкой, а на кронштейне, расположенном снизу внешней рамки, перпендикулярно первому акселерометру расположен второй акселерометр.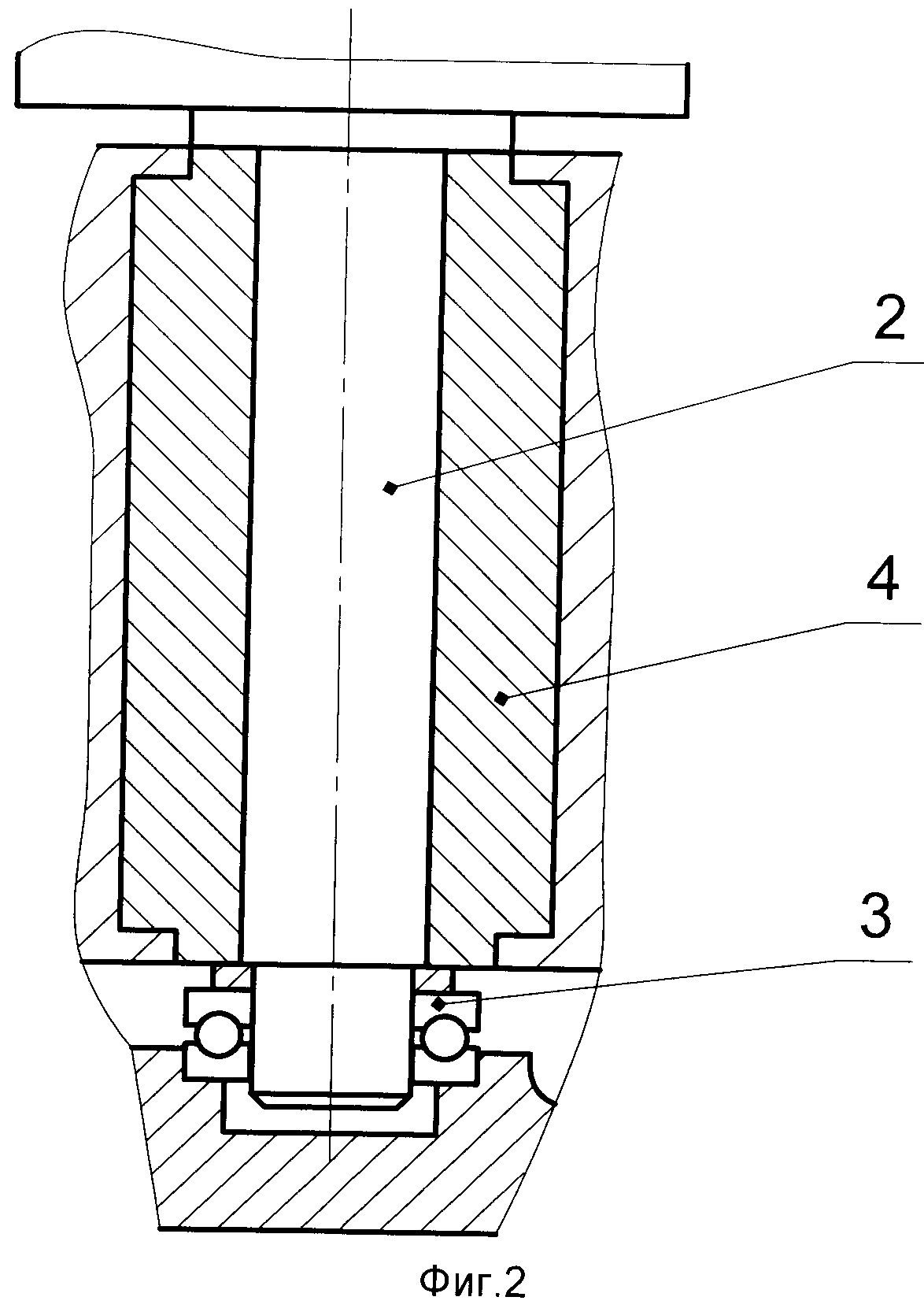
Механизм подачи патронов для автоматического стрелкового оружия с ленточным питанием
Способ безокислительной термической обработки деталей и сборочных единиц
Способ доработки серийного транспортного средства, оснащенного кузовом-фургоном, в специальное транспортное средство и установочный комплект для такой доработки
Топопривязчик
Локальная система терморегулирования воздуха зоны автоматизированных рабочих мест операторов мобильного информационно-аналитического комплекса вооружений
Мобильный комплекс навигации и топопривязки
Оружейная установка с прицельным устройством и способ его выверки
Способ изготовления деталей типа "стакан"
Модуль управления мобильного комплекса топогеодезической привязки
Стрелковое оружие
Механизм отражения стрелкового оружия
Способ автоматизированного определения навигационно-топогеодезических параметров
Осколочно-фугасная боевая часть

