Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ПРЕКРАЩЕНИЕМ МЕДЛЕННОГО ПЕРЕДВИЖЕНИЯ ДЛЯ ЭЛЕКТРОМОБИЛЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к предложению улучшения устройства управления прекращением медленного передвижения, предоставляемого в электромобиле, таком как аккумуляторное транспортное средство, которое использует только электромотор в качестве своего источника питания, и гибридное транспортное средство, которое движется посредством использования энергии, извлекаемой из двигателя и электромотора.
Уровень техники
[0002] Электромобиль приводит в действие электромотор в соответствии с диапазоном, выбранным посредством манипуляции с переключением передач, которое выполняется водителем для того, чтобы формировать режим передвижения транспортного средства. Посредством передачи этой мощности из электромотора на ходовые колеса может быть реализовано передвижение посредством электроэнергии.
[0003] Когда электромобилю инструктируется двигаться на очень низкой скорости (инструктируется медленное передвижение) за счет крутящего момента для медленного передвижения с выбранным диапазоном переднего или заднего хода, как в случае транспортного средства с автоматической трансмиссией, электромотор приводится в действие и управляется так, что он выводит мгновенный крутящий момент для медленного передвижения из электромотора, и этот крутящий момент для медленного передвижения передается на ходовые колеса, чтобы обеспечивать медленное передвижение электромобиля.
[0004] Например, патентный документ 1 предлагает технологию управления медленным передвижением для электромобиля. В этой технологии, в дополнение к предоставлению возможности медленного передвижения электромобиля, как упомянуто выше, выполняется прекращение медленного передвижения, которое уменьшает крутящий момент для медленного передвижения электромотора (вплоть до нуля), когда удовлетворяется заданное условие разрешения прекращения медленного передвижения. Это заданное условие состоит в том, что значение определения скорости транспортного средства ниже заданного значения, и также тормозная сила превышает или равна заданному значению, например, когда транспортное средство находится в остановленном состоянии без намерения начинать передвижение транспортного средства. Такое прекращение медленного передвижения выполняется, поскольку медленное передвижение не осуществляется сразу, а также поскольку может подавляться потребление мощности.
[0005] Тем не менее, в устройстве управления прекращением медленного передвижения для электромобиля, как раскрыто в патентном документе 1, прекращение медленного передвижения, которое уменьшает крутящий момент для медленного передвижения электромотора (вплоть до нуля), безусловно выполняется, когда удовлетворяется заданное условие разрешения прекращения медленного передвижения, например, когда транспортное средство находится в остановленном состоянии без намерения начинать передвижение транспортного средства. Следовательно, возникает следующая проблема.
[0006] Например, далее поясняется случай, в котором водитель регулирует скорость транспортного средства в районе 0 посредством незначительного увеличения/снижения тормозной силы через манипулирование с педалью тормоза, в то время как электромобиль выводит крутящий момент для медленного передвижения в прямом направлении вследствие задания диапазона переднего хода (режима вождения).
[0007] В этом случае, удовлетворяется условие разрешения прекращения медленного передвижения, связанное со скоростью транспортного средства, поскольку скорость транспортного средства находится в районе 0. С другой стороны, не удовлетворяется условие разрешения прекращения медленного передвижения, связанное с тормозной силой, поскольку тормозная сила используется для того, чтобы регулировать скорость транспортного средства в районе 0 относительно мгновенного крутящего момента для медленного передвижения, и, следовательно, не превышает или равна вышеуказанному заданному значению. Следовательно, в этом случае, крутящий момент для медленного передвижения выдается из электромотора без выполнения прекращения медленного передвижения.
[0008] Если водитель увеличивает тормозную силу по неосторожности или для того, чтобы останавливать транспортное средство, тормозная сила становится больше или равной заданному значению, так что удовлетворяется условие разрешения прекращения медленного передвижения, связанное с тормозной силой. В это время, удовлетворяется и условие разрешения прекращения медленного передвижения, связанное со скоростью транспортного средства, и условие разрешения прекращения медленного передвижения, связанное с тормозной силой, так что крутящий момент для медленного передвижения быстро сбрасывается до 0 посредством выполнения прекращения медленного передвижения.
[0009] До того как крутящий момент для медленного передвижения сбрасывается до 0 посредством такого прекращения медленного передвижения, водитель сосредотачивает свое внимание на регулировании скорости транспортного средства в районе 0 посредством манипулирования с тормозом, как упомянуто выше, и, следовательно, вообще не знает об изменении крутящего момента. Следовательно, когда крутящий момент для медленного передвижения сбрасывается до 0 посредством прекращения медленного передвижения, водитель чувствует уменьшение крутящего момента, не связанное с его действиями при вождении, т.е. непреднамеренное уменьшение крутящего момента. Следовательно, возникает такая проблема, что у водителя возникает странное ощущение.
[0010] Эта проблема возникает аналогично также в случае, если водитель регулирует скорость электромобиля в районе 0 посредством осторожного манипулирования с тормозом, в то время как электромобиль выводит крутящий момент для медленного передвижения в обратном направлении вследствие задания диапазона заднего хода (режима заднего хода).
Список цитируемых источников
Патентные документы
[0011] Патентный документ 1. Публикация заявки на патент Японии № 2010-093990.
Раскрытие изобретения
[0012] Задача настоящего изобретения заключается в том, чтобы создать устройство управления прекращением медленного передвижения для электромобиля, разработанное для решения вышеуказанной проблемы посредством осуществления такой идеи, что проблема может разрешаться в случае, если прекращение медленного передвижения запрещается, с тем чтобы не выполнять прекращение медленного передвижения, даже если удовлетворяется условие разрешения прекращения медленного передвижения, когда скорость транспортного средства находится в заданной области низких скоростей с выводимым крутящим моментом для медленного передвижения.
[0013] Для этого согласно настоящему изобретению устройство управления прекращением медленного передвижения для электромобиля имеет нижеприведенную конструкцию. Сначала, будет пояснен электромобиль, который является базовым предварительным условием основной конструкции согласно настоящему изобретению. Этот электромобиль выполнен с возможностью передвижения посредством передачи мощности из электромотора на ходовое колесо в соответствии с диапазоном переключения передач, выбранным посредством манипулирования с переключением передач, которое выполняется водителем для того, чтобы формировать режим передвижения транспортного средства. Кроме того, электромобиль выполнен с возможностью медленного передвижения на очень низкой скорости за счет крутящего момента для медленного передвижения, извлекаемого из электромотора. Кроме того, электромобиль выполнен с возможностью осуществления прекращения медленного передвижения, так что крутящий момент для медленного передвижения электромотора уменьшается, когда удовлетворяется условие разрешения прекращения медленного передвижения. Условие разрешения прекращения медленного передвижения состоит в том, что абсолютное значение скорости транспортного средства ниже значения скорости для определения остановки транспортного средства, и тормозная сила превышает или равна заданному значению тормозной силы.
[0014] Для такого электромобиля, устройство управления прекращением медленного передвижения согласно настоящему изобретению включает в себя средство определения области скоростей для запрещения прекращения медленного передвижения, выполненное с возможностью определения того, ниже или нет абсолютное значение скорости транспортного средства значения скорости для запрещения прекращения медленного передвижения в состоянии, в котором крутящий момент для медленного передвижения выдается без выполнения прекращения медленного передвижения; и средство запрещения прекращения медленного передвижения, выполненное с возможностью запрещения прекращения медленного передвижения независимо от удовлетворения условия разрешения прекращения медленного передвижения, когда средство определения области скоростей для запрещения прекращения медленного передвижения определяет то, что абсолютное значение скорости транспортного средства находится в области скоростей для запрещения прекращения медленного передвижения. Кроме того, средство определения области скоростей для запрещения прекращения медленного передвижения включает в себя таймер запрещения прекращения медленного передвижения, выполненный с возможностью измерения истекшего времени, в течение которого абсолютное значение скорости транспортного средства меньше значения скорости для запрещения прекращения медленного передвижения. Кроме того, средство запрещения прекращения медленного передвижения выполнено с возможностью запрещения прекращения медленного передвижения, когда таймер запрещения прекращения медленного передвижения указывает заданное значение времени.
[0015] Согласно такому устройству управления прекращением медленного передвижения для электромобиля, прекращение медленного передвижения запрещается независимо от удовлетворения условия разрешения прекращения медленного передвижения, когда абсолютное значение скорости транспортного средства попадает в область скоростей для запрещения прекращения медленного передвижения, которая меньше значения скорости для запрещения прекращения медленного передвижения в состоянии вывода крутящего момента для медленного передвижения.
[0016] В случае если прекращение медленного передвижения выполняется в этой области скоростей для запрещения прекращения медленного передвижения, как упомянуто выше, водитель чувствует уменьшение крутящего момента, не соответствующее его действию при вождении, со странным ощущением. Это обусловлено тем, что выполняется прекращение медленного передвижения, когда тормозная сила увеличивается так, что она удовлетворяет условию разрешения прекращения медленного передвижения, связанному с тормозной силой, в ситуации, когда удовлетворяется условие разрешения прекращения медленного передвижения, связанное со скоростью транспортного средства, при этом еще не удовлетворяется условие разрешения прекращения медленного передвижения, связанное с тормозной силой. Тем не менее, согласно настоящему изобретению, такое уменьшение крутящего момента, вызывающее странное ощущение, может не допускаться посредством запрещения прекращения медленного передвижения.
Краткое описание чертежей
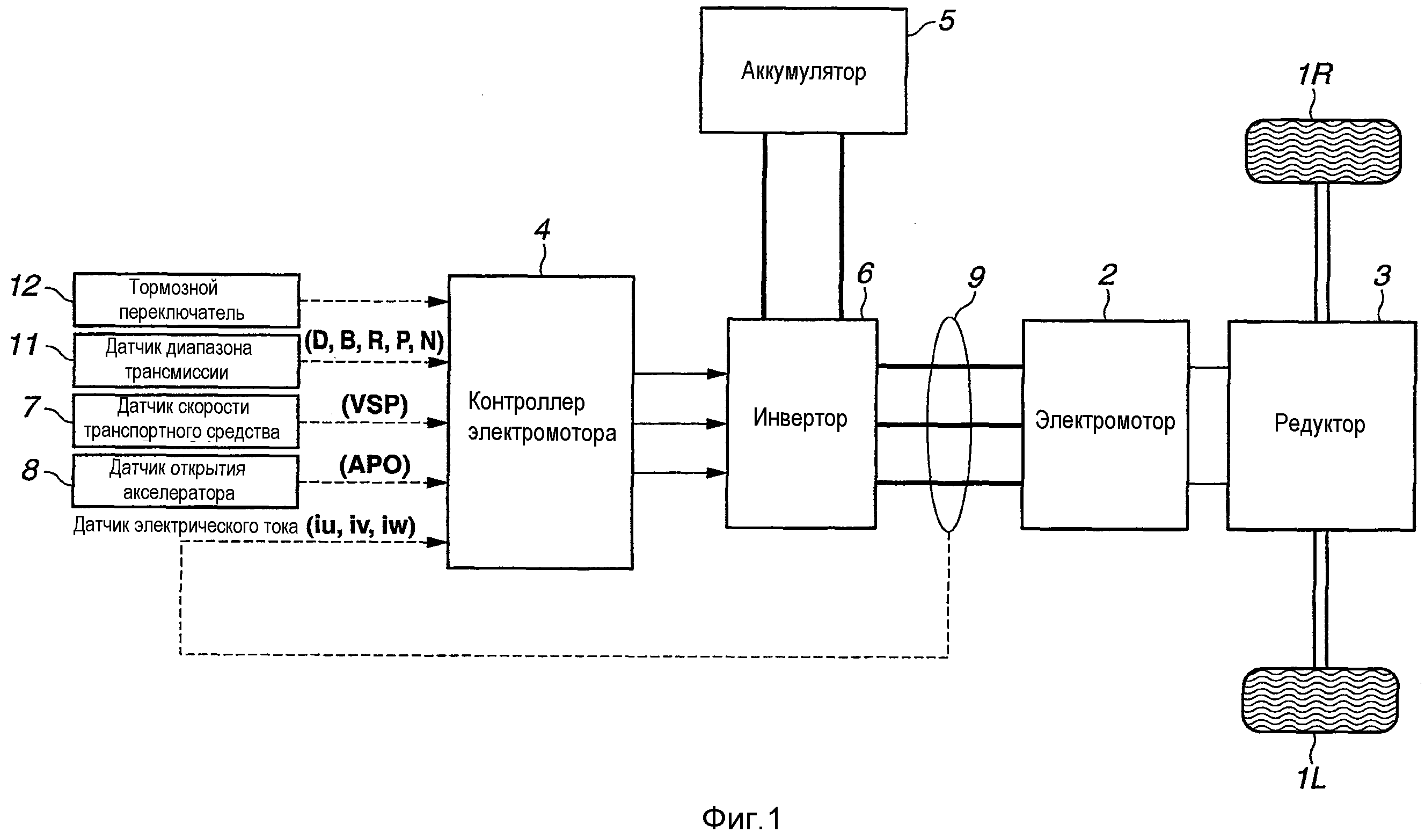
[0017] Фиг.1 представляет собой схематичный вид системы, показывающий приводную систему и систему управления для приводной системы в транспортном средстве, снабженном устройством управления прекращением медленного передвижения в варианте осуществления согласно настоящему изобретению.
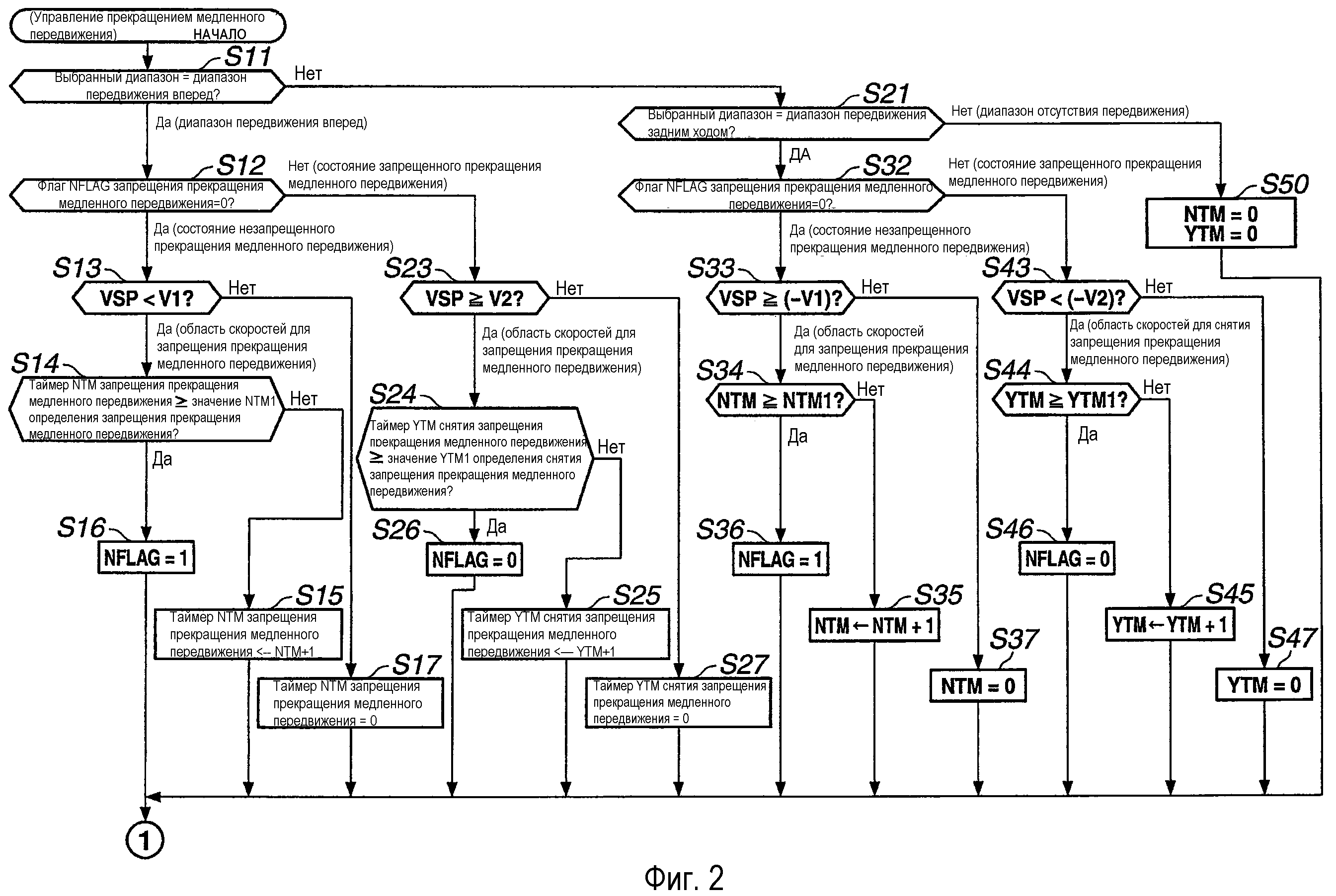
Фиг.2 представляет собой блок-схему последовательности операций способа, показывающую первую половину программы управления прекращением медленного передвижения, которая выполняется посредством контроллера электромотора, показанного на Фиг.1.
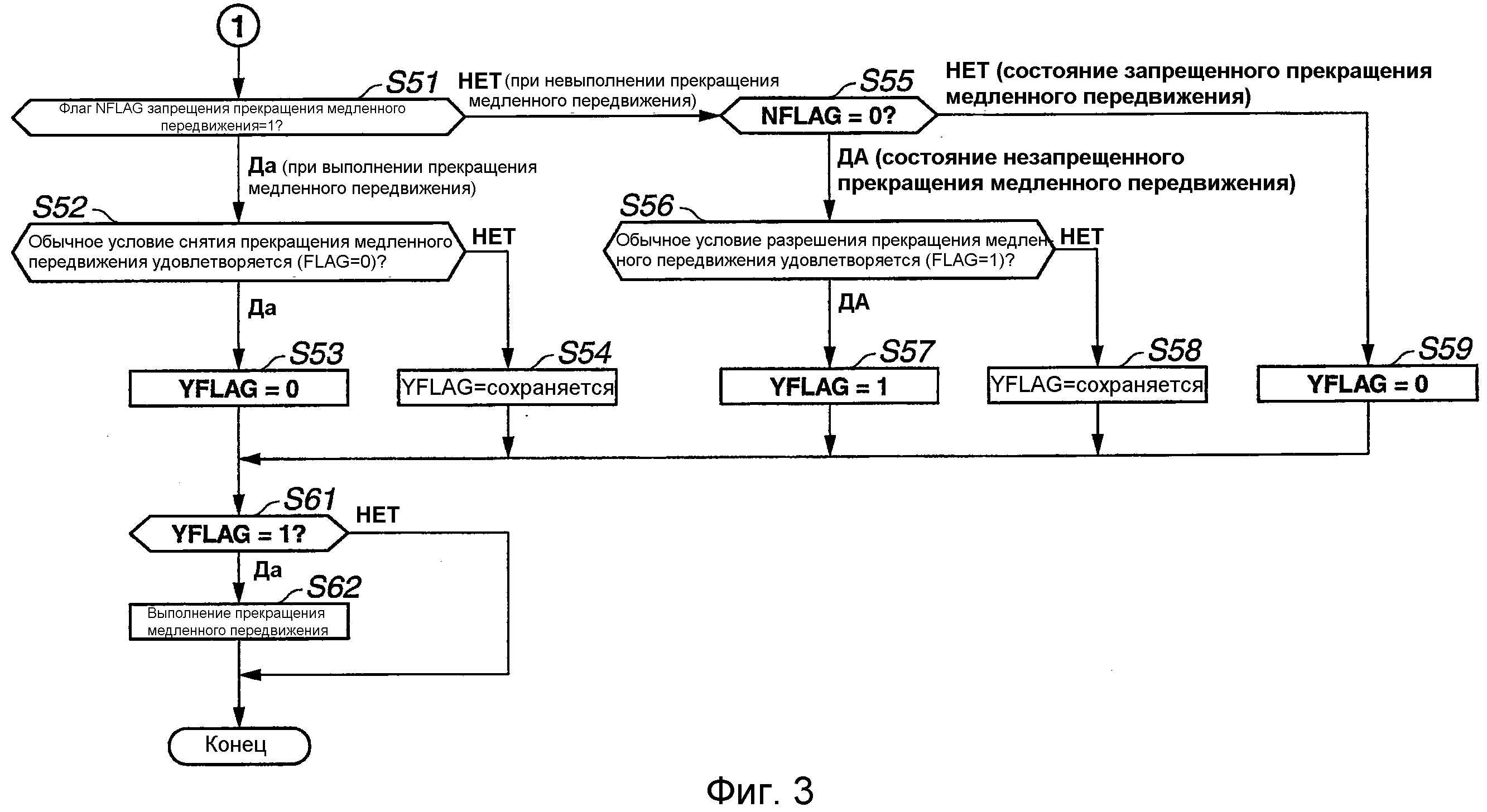
Фиг.3 представляет собой блок-схему последовательности операций способа, показывающую вторую половину программы управления прекращением медленного передвижения, которая выполняется посредством контроллера электромотора, показанного на Фиг.1.
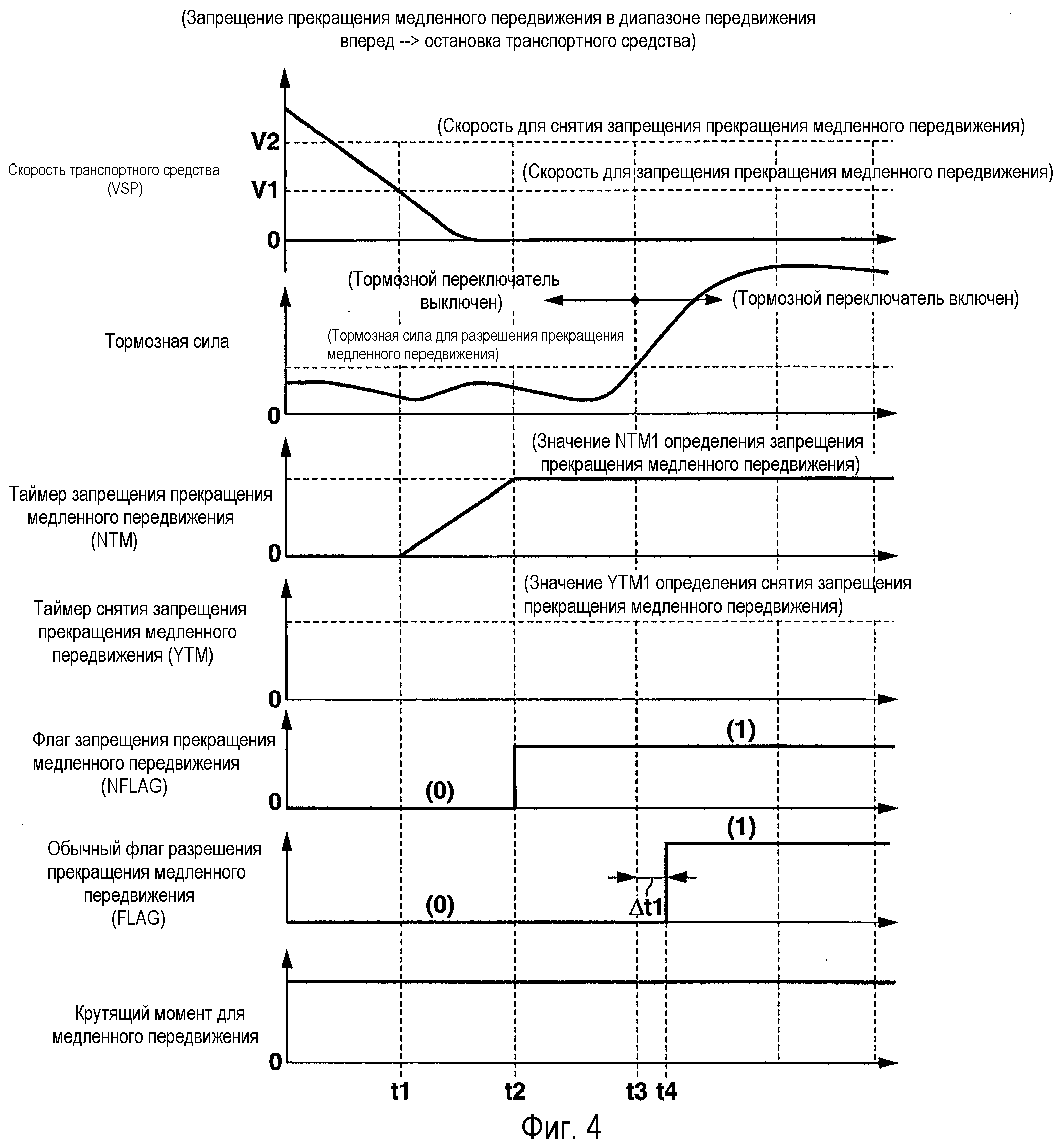
Фиг.4 представляет собой временную диаграмму, показывающую рабочее состояние посредством управляющей программы по Фиг.2 и 3, в случае если скорость транспортного средства электромобиля поддерживается на уровне в районе 0 посредством осторожного манипулирования с тормозом с крутящим моментом для медленного передвижения, сопутствующим диапазону передвижения вперед, и затем тормозная сила увеличивается до уровня, позволяющего удовлетворять условию разрешения прекращения медленного передвижения.
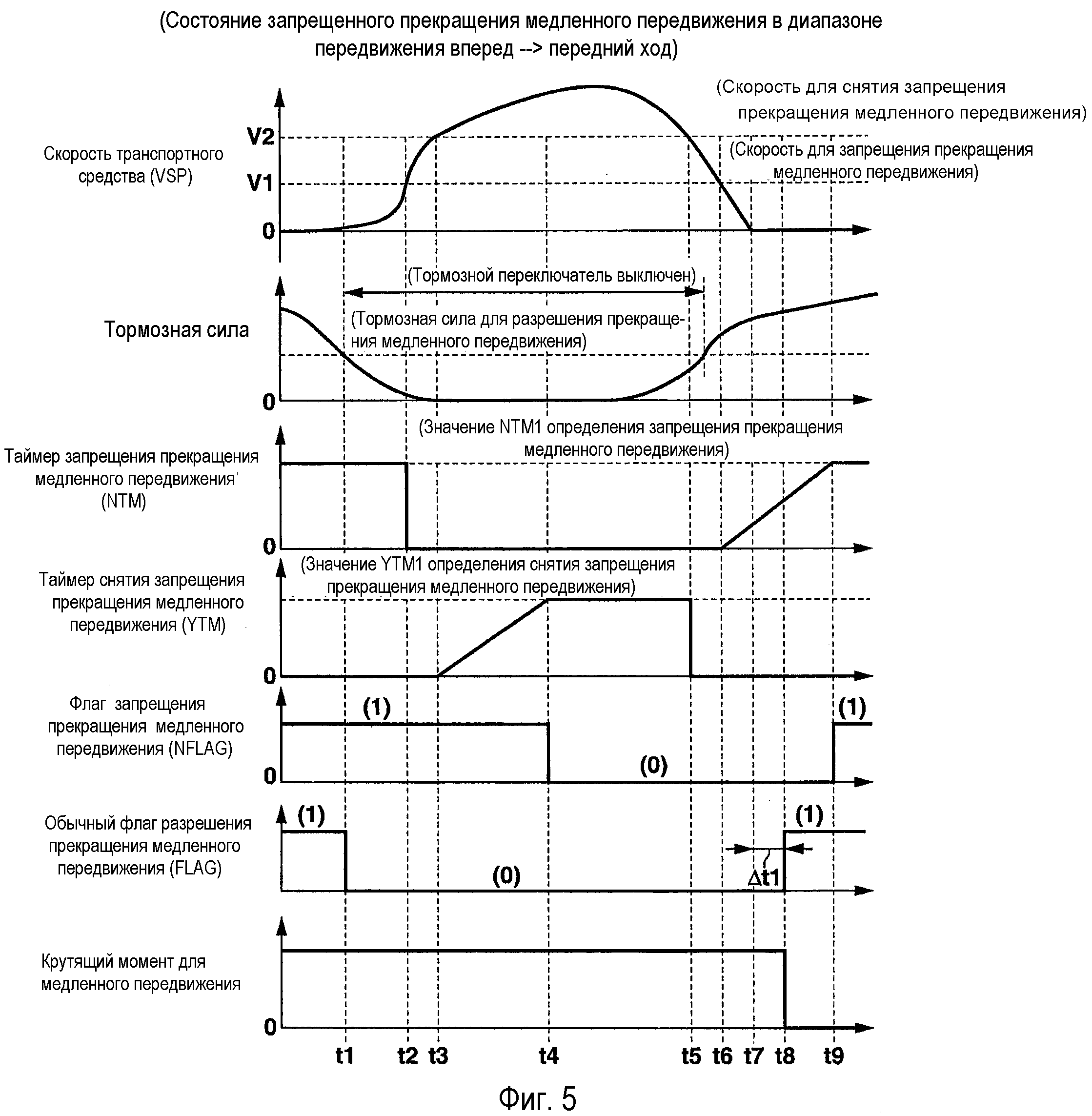
Фиг.5 представляет собой временную диаграмму, показывающую рабочее состояние посредством управляющей программы по Фиг.2 и 3, в случае если медленное передвижение осуществляется из состояния, в котором прекращение медленного передвижения запрещается, как показано на Фиг.4, и затем медленное передвижение заканчивается, чтобы останавливать транспортное средство посредством манипулирования с тормозом.
Подробное описание изобретения
[0018] В дальнейшем в этом документе подробнее поясняются варианты осуществления согласно настоящему изобретению со ссылкой на чертежи.
Конфигурация
Фиг.1 является видом, показывающим приводную систему и систему управления для приводной системы в транспортном средстве, снабженном устройством управления прекращением медленного передвижения в варианте осуществления согласно настоящему изобретению. Транспортное средство в этом варианте осуществления, как показано на Фиг.1, представляет собой транспортное средство с электроприводом, которое может двигаться посредством приведения в действие передних левого и правого (ходовых) колес 1L и 1R или заднего левого и правого (ходовых) колес. Эти передние левое и правое колеса 1L и 1R приводятся в действие посредством электромотора 2 через редуктор 3, включающий в себя блок дифференциала.
[0019] Аккумулятор 5 выступает в качестве источника электроэнергии. Контроллер 4 электромотора преобразует мощность постоянного тока (DC) аккумулятора 5 в мощность переменного тока (AC) посредством инвертора 6. Эта мощность переменного тока подается в электромотор 2 под управлением инвертора 6. Тем самым электромотор 2 управляется таким образом, что крутящий момент электромотора 2 становится равным результату вычисления (значению целевого крутящего момента электромотора) контроллера 4 электромотора.
[0020] В случае если результатом вычисления (значением целевого крутящего момента электромотора) контроллера 4 электромотора является крутящий момент для медленного передвижения в ответ на запрос на медленное передвижение транспортного средства, контроллер 4 электромотора подает ток формирования крутящего момента для медленного передвижения в электромотор 2 посредством использования инвертора 6. В это время электромотор 2 формирует крутящий момент для медленного передвижения и передает этот крутящий момент для медленного передвижения через редуктор 3 на левое и правое колеса 1L и 1R, так что транспортное средство может ехать за счет медленного передвижения.
[0021] Кроме того, в случае если результатом вычисления (значением целевого крутящего момента электромотора) контроллера 4 электромотора является отрицательное значение для необходимости электромотору 2 формировать рекуперативное торможение, контроллер 4 электромотора прикладывает нагрузку для выработки электроэнергии к электромотору 2 посредством инвертора 6. В это время электроэнергия, сформированная посредством рекуперативного торможения электромотора 2, преобразуется в мощность постоянного тока (DC) посредством преобразования переменного тока в постоянный инвертора 6 и затем заряжается в аккумулятор 5.
[0022] Контроллер 4 электромотора принимает сигналы, извлекаемые из датчика 7 скорости транспортного средства, датчика 8 открытия акселератора, датчика 9 электрического тока, датчика 11 диапазона трансмиссии и тормозного переключателя 12, в качестве информации для вышеуказанного вычисления значения целевого крутящего момента электромотора. Датчик 7 скорости транспортного средства считывает скорость VSP транспортного средства, которая является скоростью электромобиля относительно земли. Датчик 8 открытия акселератора считывает открытие APO акселератора (требуемую электромотором нагрузку), которое является величиной нажатия педали акселератора водителем. Датчик 9 электрического тока считывает электрический ток (значения iu, iv и iw электрического тока для трехфазного переменного тока, имеющего U-фазу, V-фазу и W-фазу в случае Фиг.1) электромотора 2. Датчик 11 диапазона трансмиссии считывает то, что выбрано из диапазона переднего хода (D-диапазона, т.е. режима вождения), диапазона ограничения частоты вращения электромотора (B-диапазона, т.е. режима торможения, соответствующего режиму торможения двигателем в случае транспортного средства с автоматической трансмиссией), диапазона заднего хода (R-диапазона, т.е. режима заднего хода), диапазона остановки транспортного средства (N-диапазона, т.е. режима нейтрали) и диапазона парковки (P-диапазона, т.е. режима парковки), посредством манипулирования с переключением передач водителем, чтобы формировать команду для режима передвижения транспортного средства. Другими словами, датчик 11 диапазона трансмиссии считывает выбранное в данный момент положение переключения коробки передач. Тормозной переключатель 12 включается (переходит во включенное состояние) в ответ на уровень хода педали тормоза или уровень давления жидкости главного цилиндра, который приводит к тому, что тормозная сила становится больше или равной заданному значению тормозной силы (значению тормозной силы для разрешения прекращения медленного передвижения), предоставленному для определения того, что у водителя нет намерения начинать передвижение транспортного средства.
[0023] Контроллер 4 электромотора формирует PWM-сигнал для управления электромотором 2 в соответствии с принимаемой информацией и формирует сигнал приведения в действие для инвертора 6 посредством использования приводящей схемы в соответствии с PWM-сигналом. Инвертор 6 включает в себя, например, два переключающих элемента (например, силовые полупроводниковые элементы, такие как IGBT) в расчете на каждую фазу. Инвертор 6 включает/выключает соответствующие переключающие элементы в соответствии с сигналом приведения в действие и тем самым преобразует постоянный ток, поданный из аккумулятора 5, в переменный ток, либо преобразует переменный ток из электромотора 2 в постоянный ток. Таким образом, инвертор 6 подает электрический ток, соответствующий значению целевого крутящего момента электромотора, в электромотор 2.
[0024] Электромотор 2 формирует движущую силу согласно переменному току, поданному из инвертора 6, и затем передает движущую силу через редуктор 3 на левое и правое колеса 1L и 1R. Кроме того, когда электромотор 2 тормозит посредством левого и правого колес 1L и 1R в ходе передвижения транспортного средства, т.е. во время так называемого обратного приведения в действие, в электромотор 2 подается нагрузка для выработки электроэнергии, так что электромотор 2 выполняет рекуперативное торможение. Тем самым в это время кинетическая энергия транспортного средства регенерируется и накапливается (заряжается) в аккумуляторе 5.
[0025] Управление прекращением медленного передвижения
Контроллер 4 электромотора выполняет управление прекращением медленного передвижения посредством выполнения управляющих программ, показанных на Фиг.2 и 3. Другими словами, контроллер 4 электромотора вычисляет значения целевого крутящего момента электромотора для медленного передвижения и выводит свои команды в инвертор 6, так что выполняется управление приведением в действие электромотора 2 для медленного передвижения (включающее в себя управление прекращением медленного передвижения, управление запрещением прекращения медленного передвижения, управление снятием запрещения прекращения медленного передвижения).
[0026] Управляющие программы Фиг.2 и 3 многократно выполняются, когда переключатель зажигания электромобиля находится во включенном состоянии (включен). На этапе S11 по Фиг.2 определяется то, является или нет активным (т.е. выбран или нет) диапазон передвижения вперед, к примеру, вышеуказанный диапазон переднего хода (D) и диапазон ограничения частоты вращения электромотора (B) (соответствующий диапазону торможения двигателем).
[0027] Если на этапе S11 определяется то, что диапазон передвижения вперед не является активным, на этапе S21 определяется то, является или нет активным (т.е. выбран или нет) диапазон передвижения задним ходом, к примеру, диапазон заднего хода (R). Если на этапе S21 определяется то, что диапазон передвижения задним ходом не является активным, диапазон отсутствия передвижения, к примеру диапазон остановки транспортного средства (N) и диапазон парковки (P), является активным (т.е. выбран).
[0028] Если на этапе S11 определяется то, что диапазон передвижения вперед является активным, программа переходит к этапу S12, так что запрещение или разрешение прекращения медленного передвижения определяется следующим образом. На этапе S12 определяется то, указывает флаг NFLAG запрещения прекращения медленного передвижения, который задается так, как упомянуто ниже, «0» или «1», т.е. ложь или истину. Тем самым определяется то, (еще) не запрещено или (уже) запрещено прекращение медленного передвижения.
[0029] Если на этапе S12 флаг NFLAG запрещения прекращения медленного передвижения указывает «0» (NFLAG=0, т.е. состояние еще незапрещенного прекращения медленного передвижения), программа переходит к этапу S13, чтобы определять то, должно или нет быть запрещено прекращение медленного передвижения, т.е. чтобы определять то, должен или нет флаг NFLAG запрещения прекращения медленного передвижения задаваться равным «1», следующим образом. Сначала, на этапе S13 определяется то, находится или нет скорость VSP транспортного средства в области скоростей для запрещения прекращения медленного передвижения, которая ниже скорости (значения) V1 для запрещения прекращения медленного передвижения, предоставленного для диапазона передвижения вперед, как показано на Фиг.4 и 5.
[0030] Далее приводятся пояснения относительно скорости V1 для запрещения прекращения медленного передвижения для диапазона передвижения вперед, как показано на Фиг. 4 и 5. Датчик 7 скорости транспортного средства по Фиг.1, который используется для определения в отношении области скоростей для запрещения прекращения медленного передвижения, определяет значение скорости VSP транспортного средства, которое включает в себя ошибку определения вследствие шума. Следовательно, в этом варианте осуществления, в случае если значение скорости VSP транспортного средства попадает в диапазон от 0 до значения (V1: 0,2 км/ч, например), немного превышающего абсолютную величину ошибки определения, это значение скорости VSP транспортного средства не используется в качестве порогового значения для определения в отношении области скоростей для запрещения прекращения медленного передвижения. Определение в отношении области скоростей для запрещения прекращения медленного передвижения выполняется следующим образом.
[0031] В случае диапазона передвижения вперед значение определения скорости VSP транспортного средства в ходе медленного передвижения является положительным значением. Следовательно, как показано на Фиг.4 и 5, V1 обозначает скорость для запрещения прекращения медленного передвижения. Кроме того, область скоростей транспортного средства (VSP=0~V1) ниже скорости V1 для запрещения прекращения медленного передвижения для диапазона передвижения вперед, обозначает область скоростей для запрещения прекращения медленного передвижения, как показано на Фиг.4 и 5.
[0032] Следует отметить, что скорость V1 для запрещения прекращения медленного передвижения для диапазона передвижения вперед выше значения скорости для определения остановки транспортного средства, как и следовало ожидать. Это значение скорости для определения остановки транспортного средства используется для определения того, удовлетворяется или нет условие разрешения прекращения медленного передвижения, связанное с обычной скоростью транспортного средства.
[0033] В этом варианте осуществления, как показано на Фиг.4 и 5, скорость для снятия запрещения прекращения медленного передвижения (V2: 0,5 км/ч, например) для диапазона передвижения вперед задается таким образом, что скорость V2 для снятия запрещения прекращения медленного передвижения выше на величину гистерезиса (допустимый запас) скорости V1 для запрещения прекращения медленного передвижения для диапазона передвижения вперед. Диапазон скоростей транспортного средства (VSP≥V2), превышающий или равный скорости V2 для снятия запрещения прекращения медленного передвижения, задается как область скоростей для снятия запрещения прекращения медленного передвижения. Посредством задания этого, существует гистерезисная область скоростей между скоростью V1 для запрещения прекращения медленного передвижения для диапазона передвижения вперед и скоростью V2 для снятия запрещения прекращения медленного передвижения для диапазона передвижения вперед. Следовательно, можно не допускать возникновения избыточного переключения между запрещением прекращения медленного передвижения и снятием запрещения прекращения медленного передвижения.
[0034] В случае диапазона передвижения задним ходом значение определения скорости VSP транспортного средства является отрицательным значением. Следовательно, значение (-V1), заданное так, что оно имеет полярность, противоположную полярности в случае диапазона передвижения вперед, показанного на Фиг.4 и 5, обозначает скорость для запрещения прекращения медленного передвижения. Кроме того, 0>VSP≥(-V1) обозначает область скоростей для запрещения прекращения медленного передвижения для диапазона передвижения задним ходом. Заданное значение (-V2) обозначает скорость для снятия запрещения прекращения медленного передвижения для диапазона передвижения задним ходом, и VSP<(-V2) обозначает область скоростей для снятия запрещения прекращения медленного передвижения для диапазона передвижения задним ходом.
[0035] Хотя на этапе S13 определяется то, что скорость VSP транспортного средства находится в области скоростей для запрещения прекращения медленного передвижения (VSP<V1), на этапе S14 определяется то, уже указывает или нет (достиг или нет) таймер NTM запрещения прекращения медленного передвижения значение NTM1 определения запрещения прекращения медленного передвижения. Этот таймер NTM запрещения прекращения медленного передвижения функционирует с возможностью измерения истекшего времени со времени, когда скорость VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения. До тех пор пока показание таймера NTM запрещения прекращения медленного передвижения не достигнет значения NTM1 определения запрещения прекращения медленного передвижения, программа переходит к этапу S15. На этапе S15 таймер NTM запрещения прекращения медленного передвижения увеличивается, и тем самым измеряется продолжительность, истекшая от момента времени, когда скорость VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения (заданную посредством VSP<V1).
[0036] Когда таймер NTM запрещения прекращения медленного передвижения становится больше или равным значению NTM1 определения запрещения прекращения медленного передвижения посредством приращения таймера NTM запрещения прекращения медленного передвижения на этапе S15, а именно, когда заданное время, соответствующее значению NTM1 определения запрещения прекращения медленного передвижения, истекло со времени, когда скорость VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения, программа переходит от этапа S14 к этапу S16. На этапе S16 флаг NFLAG запрещения прекращения медленного передвижения задается равным «1», так что прекращение медленного передвижения запрещается. Следует отметить, что этапы S13 и S14 соответствуют средству определения области скоростей для запрещения прекращения медленного передвижения согласно настоящему изобретению, и этап S16 соответствует средству запрещения прекращения медленного передвижения согласно настоящему изобретению.
[0037] Если на этапе S13 определяется то, что скорость VSP транспортного средства находится за пределами области скоростей для запрещения прекращения медленного передвижения (заданной посредством VSP<V1), программа переходит к этапу S17. На этапе S17 таймер NTM запрещения прекращения медленного передвижения сбрасывается до «0».
[0038] Если на этапе S12 определяется то, что флаг NFLAG запрещения прекращения медленного передвижения указывает «1» (т.е. состояние уже запрещенного прекращения медленного передвижения), программа переходит к этапу S23, чтобы определять то, должно или нет быть снято запрещение прекращения медленного передвижения, т.е. должен или нет флаг NFLAG запрещения прекращения медленного передвижения задаваться равным «0», следующим образом. Сначала, на этапе S23 определяется то, находится или нет скорость VSP транспортного средства в области скоростей для снятия запрещения прекращения медленного передвижения, которая выше или равна скорости V2 для снятия запрещения прекращения медленного передвижения для диапазона передвижения вперед, как показано на Фиг. 4 и 5.
[0039] Хотя на этапе S23 определяется то, что скорость VSP транспортного средства находится в области скоростей для снятия запрещения прекращения медленного передвижения (заданной посредством VSP≥V2), на этапе S24 определяется то, уже указывает или нет (достиг или нет) таймер YTM снятия запрещения прекращения медленного передвижения значение YTM1 определения снятия запрещения прекращения медленного передвижения. Этот таймер YTM снятия запрещения прекращения медленного передвижения функционирует с возможностью измерения истекшего времени со времени, когда скорость VSP транспортного средства переходит в область скоростей для снятия запрещения прекращения медленного передвижения. До тех пор, пока показание таймера YTM снятия запрещения прекращения медленного передвижения не достигнет значения YTM1 определения снятия запрещения прекращения медленного передвижения, программа переходит к этапу S25. На этапе S25 таймер YTM снятия запрещения прекращения медленного передвижения увеличивается, и тем самым измеряется продолжительность, истекшая со времени, когда скорость VSP транспортного средства переходит в область скоростей для снятия запрещения прекращения медленного передвижения (заданную посредством VSP≥V2).
[0040] Когда на этапе S25 таймер YTM снятия запрещения прекращения медленного передвижения становится больше или равным значению YTM1 определения снятия запрещения прекращения медленного передвижения посредством приращения таймера YTM снятия запрещения прекращения медленного передвижения, а именно, когда заданное время, соответствующее значению YTM1 определения снятия запрещения прекращения медленного передвижения, истекло со времени, когда скорость VSP транспортного средства переходит в область скоростей для снятия запрещения прекращения медленного передвижения (заданную посредством VSP≥V2), программа переходит от этапа S24 к этапу S26. На этапе S26 флаг NFLAG запрещения прекращения медленного передвижения сбрасывается до «0», так что запрещение прекращения медленного передвижения снимается. Следует отметить, что этапы S23 и S24 соответствуют средству определения области скоростей для снятия запрещения прекращения медленного передвижения согласно настоящему изобретению, и этап S26 соответствует средству снятия запрещения прекращения медленного передвижения согласно настоящему изобретению.
[0041] Если на этапе S23 определяется то, что скорость VSP транспортного средства находится за пределами области скоростей для снятия запрещения прекращения медленного передвижения (заданной посредством VSP≥V2), программа переходит к этапу S27. На этапе S27 таймер YTM снятия запрещения прекращения медленного передвижения сбрасывается до «0».
[0042] Если на этапе S21 определяется то, что диапазон передвижения задним ходом, к примеру, R-диапазон является активным (т.е. выбран), программа переходит к этапу S32, чтобы проводить разрешение/запрещение прекращения медленного передвижения следующим образом. На этапе S32 определяется то, указывает флаг NFLAG запрещения прекращения медленного передвижения (который задается так, как упомянуто ниже) «0» или «1». Тем самым определяется то, еще не запрещено или уже запрещено прекращение медленного передвижения.
[0043] Если на этапе S32 определяется то, что флаг NFLAG запрещения прекращения медленного передвижения указывает «0» (NFLAG=0), программа переходит к этапу S33, чтобы определять то, должно или нет быть запрещено прекращение медленного передвижения, т.е. должен или нет флаг NFLAG запрещения прекращения медленного передвижения задаваться равным «1», следующим образом. Сначала, на этапе S33 определяется то, находится или нет скорость VSP транспортного средства в области скоростей для запрещения прекращения медленного передвижения, которая превышает или равна первому заданному значению (-V1), предоставленному для диапазона передвижения задним ходом.
[0044] Хотя на этапе S33 определяется то, что скорость VSP транспортного средства находится в области скоростей для запрещения прекращения медленного передвижения (заданной посредством VSP≥-V1), на этапе S34 определяется то, уже указывает или нет (достиг или нет) таймер NTM запрещения прекращения медленного передвижения значение NTM1 определения запрещения прекращения медленного передвижения. Этот таймер NTM запрещения прекращения медленного передвижения функционирует с возможностью измерения истекшего времени со времени, когда скорость VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения (заданную посредством VSP≥-V1). До тех пор пока показание таймера NTM запрещения прекращения медленного передвижения не достигнет значения NTM1 определения запрещения прекращения медленного передвижения, программа переходит к этапу S35. На этапе S35 таймер NTM запрещения прекращения медленного передвижения увеличивается, тем самым измеряется продолжительность, истекшая со времени, когда скорость VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения (заданную посредством VSP≥-V1).
[0045] Когда на этапе S35 таймер NTM запрещения прекращения медленного передвижения становится больше или равным значению NTM1 определения запрещения прекращения медленного передвижения посредством приращения таймера NTM запрещения прекращения медленного передвижения, а именно, когда заданное время, соответствующее значению NTM1 определения запрещения прекращения медленного передвижения, истекло со времени, когда скорость VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения (заданную посредством VSP≥-V1), программа переходит от этапа S34 к этапу S36. На этапе S36 флаг NFLAG запрещения прекращения медленного передвижения задается равным «1», так что прекращение медленного передвижения запрещается. Следует отметить, что этапы S33 и S34 соответствуют средству определения области скоростей для запрещения прекращения медленного передвижения согласно настоящему изобретению, и этап S36 соответствует средству запрещения прекращения медленного передвижения согласно настоящему изобретению.
[0046] Если на этапе S33 определяется то, что скорость VSP транспортного средства находится за пределами области скоростей для запрещения прекращения медленного передвижения (заданное посредством VSP≥-V1), программа переходит к этапу S37. На этапе S37 таймер NTM запрещения прекращения медленного передвижения сбрасывается до «0».
[0047] Если на этапе S32 определяется то, что флаг NFLAG запрещения прекращения медленного передвижения указывает «1» (т.е. состояние уже запрещенного прекращения медленного передвижения), программа переходит к этапу S43, чтобы определять то, должно или нет быть снято запрещение прекращения медленного передвижения, т.е. должен или нет флаг NFLAG запрещения прекращения медленного передвижения задаваться равным «0», следующим образом. Сначала, на этапе S43 определяется то, находится или нет скорость VSP транспортного средства в области скоростей для снятия запрещения прекращения медленного передвижения, которая ниже второго заданного значения (-V2), предоставленного для диапазона передвижения задним ходом, упомянутого выше, по сравнению с Фиг. 4 и 5.
[0048] Хотя на этапе S43 определяется то, что скорость VSP транспортного средства находится в области скоростей для снятия запрещения прекращения медленного передвижения (заданной посредством VSP<-V2), на этапе S44 определяется то, уже указывает или нет (достиг или нет) таймер YTM снятия запрещения прекращения медленного передвижения значение YTM1 определения снятия запрещения прекращения медленного передвижения. Этот таймер YTM снятия запрещения прекращения медленного передвижения функционирует с возможностью измерения истекшего времени со времени, когда скорость VSP транспортного средства переходит в область скоростей для снятия запрещения прекращения медленного передвижения (заданную посредством VSP<-V2). До тех пор пока показание таймера YTM снятия запрещения прекращения медленного передвижения не достигнет значения YTM1 определения снятия запрещения прекращения медленного передвижения, программа переходит к этапу S45. На этапе S45 таймер YTM снятия запрещения прекращения медленного передвижения увеличивается, и тем самым измеряется продолжительность, истекшая со времени, когда скорость VSP транспортного средства переходит в область скоростей для снятия запрещения прекращения медленного передвижения (заданную посредством VSP<-V2).
[0049] Когда на этапе S45 таймер YTM снятия запрещения прекращения медленного передвижения становится больше или равным значению YTM1 определения снятия запрещения прекращения медленного передвижения посредством приращения таймера YTM снятия запрещения прекращения медленного передвижения, а именно, когда заданное время, соответствующее значению YTM1 определения снятия запрещения прекращения медленного передвижения, истекло со времени, когда скорость VSP транспортного средства переходит в область скоростей для снятия запрещения прекращения медленного передвижения (заданную посредством VSP<-V2), программа переходит от этапа S44 к этапу S46. На этапе S46 флаг NFLAG запрещения прекращения медленного передвижения сбрасывается до «0», так что запрещение прекращения медленного передвижения снимается. Следует отметить, что этапы S43 и S44 соответствуют средству определения области скоростей для снятия запрещения прекращения медленного передвижения согласно настоящему изобретению, и этап S46 соответствует средству снятия запрещения прекращения медленного передвижения согласно настоящему изобретению.
[0050] Если на этапе S43 определяется то, что скорость VSP транспортного средства находится за пределами области скоростей для снятия запрещения прекращения медленного передвижения (заданной посредством VSP<-V2), программа переходит к этапу S47. На этапе S47 таймер YTM снятия запрещения прекращения медленного передвижения сбрасывается до «0».
[0051] Если на этапе S21 определяется то, что диапазон отсутствия передвижения, к примеру, диапазон остановки транспортного средства (N) и диапазон парковки (P) является активным (т.е. выбран), программа переходит к этапу S50. На этапе S50, как таймер NTM запрещения прекращения медленного передвижения, так и таймер YTM снятия запрещения прекращения медленного передвижения сбрасываются до «0», чтобы подготавливаться к следующему управлению прекращением медленного передвижения.
[0052] После того как запрещение/разрешение (состояние флага NFLAG запрещения прекращения медленного передвижения) прекращения медленного передвижения определяется по отдельности относительно диапазона передвижения вперед и диапазона передвижения задним ходом, как упомянуто выше со ссылкой на Фиг.2, фактическое выполнение/снятие (состояние флага YFLAG выполнения прекращения медленного передвижения) прекращения медленного передвижения определяется посредством обработки по Фиг.3 на основе флага NFLAG запрещения прекращения медленного передвижения и обычно общего разрешения/снятия (состояния обычного флага FLAG разрешения прекращения медленного передвижения) прекращения медленного передвижения.
[0053] На этапе S51 по Фиг.3 определяется то, указывает или нет флаг YFLAG выполнения прекращения медленного передвижения, заданный так, как упомянуто ниже, «1», так что определяется то, фактически выполняется или фактически не выполняется прекращение медленного передвижения (т.е. в ходе выполнения или нет). Если на этапе S51 состояние флага YFLAG выполнения прекращения медленного передвижения равно «1» (т.е. в ходе выполнения прекращения медленного передвижения), программа переходит к этапу S52. На этапе S52 определяется то, указывает или нет обычный флаг FLAG разрешения прекращения медленного передвижения «0». Тем самым проверяется то, удовлетворяется или нет обычно общее условие снятия для прекращения медленного передвижения (т.е. должен или нет крутящий момент для медленного передвижения выводиться посредством отмены прекращения медленного передвижения).
[0054] Далее поясняются обычно общие условия снятия и разрешения для прекращения медленного передвижения. Второе условие разрешения для прекращения медленного передвижения означает остановленное состояние транспортного средства, включающее в себя отсутствие намерения начинать передвижение транспортного средства. Например, определяется то, что условие разрешения прекращения медленного передвижения удовлетворяется, если тормозной переключатель 12 по Фиг.1 включается в ответ на уровень хода педали тормоза или уровень давления жидкости главного цилиндра, который приводит к тому, что тормозная сила становится больше или равной заданному значению тормозной силы, а также если состояние, в котором скорость VSP транспортного средства находится в области скоростей для прекращения медленного передвижения около 0, продолжается в течение заданной длительности. Кроме того, первое условие снятия для прекращения медленного передвижения означает время, когда предварительная операция, чтобы начинать передвижение транспортного средства, выполняется в остановленном состоянии транспортного средства. Например, определяется то, что условие снятия прекращения медленного передвижения удовлетворяется, если тормозной переключатель 12 по Фиг.1 выключается в ответ на уровень хода педали тормоза или уровень давления жидкости главного цилиндра, который приводит к тому, что тормозная сила становится меньше заданного значения тормозной силы.
[0055] Если на этапе S52 определяется то, что обычно общее условие снятия прекращения медленного передвижения удовлетворяется, а именно, если определяется то, что крутящий момент для медленного передвижения должен выводиться посредством снятия прекращения медленного передвижения, программа переходит к этапу S53. На этапе S53 флаг YFLAG выполнения прекращения медленного передвижения задается равным «0». Тем самым крутящий момент для медленного передвижения выдается без выполнения прекращения медленного передвижения.
[0056] Тем не менее, если на этапе S52 определяется то, что обычно общее условие снятия прекращения медленного передвижения не удовлетворяется, программа переходит к этапу S54. На этапе S54 флаг YFLAG выполнения прекращения медленного передвижения поддерживается как есть. Тем самым текущее (настоящее) выполнение/отсутствие выполнения прекращения медленного передвижения продолжается.
[0057] Если на этапе S51 определяется то, что состояние флага YFLAG выполнения прекращения медленного передвижения равно «0» (YFLAG=0), а именно, если определяется то, что прекращение медленного передвижения не в ходе выполнения, программа переходит к этапу S55. На этапе S55 определяется то, равно состояние флага NFLAG запрещения прекращения медленного передвижения «0» или «1», так что определяется то, еще не запрещено или уже запрещено прекращение медленного передвижения. Если прекращение медленного передвижения еще не запрещено (NFLAG=0), программа переходит к этапу S56. На этапе S56 определяется то, удовлетворяется или нет обычно общее условие разрешения прекращения медленного передвижения, посредством определения того, равно или нет состояние обычного флага FLAG разрешения прекращения медленного передвижения «1». Другими словами, на этапе S56 определяется то, должен или нет крутящий момент для медленного передвижения быть задан равным 0 посредством прекращения медленного передвижения.
[0058] Если на этапе S56 определяется то, что обычно общее условие разрешения прекращения медленного передвижения удовлетворяется, а именно, определяется то, что крутящий момент для медленного передвижения должен быть задан равным 0, программа переходит к этапу S57. На этапе S57 выполняется прекращение медленного передвижения, чтобы не выводить крутящий момент для медленного передвижения посредством задания флага YFLAG выполнения прекращения медленного передвижения равным «1».
[0059] С другой стороны, если на этапе S56 определяется то, что обычно общее условие разрешения прекращения медленного передвижения не удовлетворяется, программа переходит к этапу S58. На этапе S58 флаг YFLAG выполнения прекращения медленного передвижения поддерживается как есть. Тем самым текущее выполнение/отсутствие выполнения прекращения медленного передвижения продолжается.
[0060] Если на этапе S55 определяется то, что состояние флага NFLAG запрещения прекращения медленного передвижения равно «1» (состояние запрещенного прекращения медленного передвижения), программа переходит к этапу S59. На этапе S59 флаг YFLAG выполнения прекращения медленного передвижения задается равным «0», независимо от обычно общего условия снятия или разрешения прекращения медленного передвижения, как определено на этапах S52 и S56. Тем самым крутящий момент для медленного передвижения выдается без выполнения прекращения медленного передвижения.
[0061] После того как состояние флага YFLAG выполнения прекращения медленного передвижения (выполнение или снятие прекращения медленного передвижения) задается на этапах S53, S54 и S57-S59, как упомянуто выше, программа переходит к этапу S61. На этапе S61 определяется то, равно или нет состояние флага YFLAG выполнения прекращения медленного передвижения «1». Если на этапе S61 состояние флага YFLAG выполнения прекращения медленного передвижения равно «1» (YFLAG=1), программа переходит к этапу S62. На этапе 62 выполняется прекращение медленного передвижения. Если состояние флага YFLAG выполнения прекращения медленного передвижения не равно «1», прекращение медленного передвижения снимается (отменяется) без выполнения процесса этапа S62.
[0062] Операции и преимущества
Далее поясняются характерные операции и преимущества, достижимые согласно управлению прекращением медленного передвижения этого варианта осуществления, как показано на Фиг.2 и 3, в случае, показанном на Фиг. 4 и 5. Другими словами, как показано посредством временной диаграммы по Фиг.4, скорость электромобиля поддерживается в районе 0 посредством осторожного манипулирования с тормозом с формированием крутящего момента для медленного передвижения в диапазоне передвижения вперед, и затем тормозная сила увеличивается до уровня, достаточного для того, чтобы удовлетворять условию разрешения прекращения медленного передвижения. После этого, как показано посредством временной диаграммы по Фиг.5, выполняется медленное передвижение вперед.
[0063] Фиг.4 является функциональной временной диаграммой в случае, если водитель поддерживает скорость VSP транспортного средства на уровне в районе 0 посредством приложения незначительной тормозной силы, вызываемой посредством осторожного манипулирования с тормозом, в то время как крутящий момент для медленного передвижения выдается из электромотора 2 с выбранным диапазоном передвижения вперед, как показано на Фиг.4, и затем тормозная сила увеличивается так, что она становится больше или равной значению тормозной силы для разрешения прекращения медленного передвижения, так что электромобиль останавливается.
[0064] Значение определения скорости VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения, которая ниже скорости V1 для запрещения прекращения медленного передвижения, посредством начального манипулирования с тормозом в момент t1 времени. В это время управляющая программа по Фиг.2 выбирает контур, включающий в себя этап S11, этап S12, этап S13, этап S14 и этап S15. Посредством процесса этапа S15 увеличивается таймер NTM запрещения прекращения медленного передвижения. Тем самым истекшее время измеряется от момента t1 времени, в который значение определения скорости VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения (заданную посредством VSP<V1).
[0065] В момент t2 времени показание таймера NTM запрещения прекращения медленного передвижения достигает значения NTM1 определения запрещения прекращения медленного передвижения. В это время на этапе S14 определяется то, что значение определения скорости VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения (ниже скорости V1 для запрещения прекращения медленного передвижения) в состоянии вывода крутящего момента для медленного передвижения. Тем самым программа переходит от этапа S14 к этапу S16. Как результат, в момент t2 времени флаг NFLAG запрещения прекращения медленного передвижения задается равным «1», так что выдается команда запрещения прекращения медленного передвижения.
[0066] В момент t3 времени водитель увеличивает тормозную силу до уровня, большего или равного значению тормозной силы разрешения прекращения медленного передвижения, по неосторожности или для того, чтобы останавливать электромобиль. В ответ на это, включается тормозной переключатель 12. Из этого сигнала тормозного переключателя 12, можно определять, удовлетворяется или нет условие разрешения прекращения медленного передвижения, связанное с тормозной силой.
[0067] Когда заданный период Δt1 времени только что истек от момента t3 времени, в который удовлетворяется условие разрешения прекращения медленного передвижения, связанное с тормозной силой (т.е. в который тормозной переключатель 12 включен), обычный флаг FLAG разрешения прекращения медленного передвижения задается равным «1» в момент t4 времени, как показано на Фиг.4, поскольку удовлетворяются как условие разрешения прекращения медленного передвижения, связанное с тормозной силой, так и условие разрешения прекращения медленного передвижения, связанное со скоростью VSP транспортного средства.
[0068] Тем не менее, поскольку состояние флага NFLAG запрещения прекращения медленного передвижения равно «1» с момента t2 времени, управляющая программа по Фиг.3 выбирает контур, включающий в себя этап S51, этап S55 и этап S59. Посредством процесса этапа S59 флаг YFLAG выполнения прекращения медленного передвижения задается равным «0». Таким образом, хотя обычный флаг FLAG разрешения прекращения медленного передвижения задается равным «1» в момент t4 времени, как упомянуто выше, прекращение медленного передвижения запрещается, так что крутящий момент для медленного передвижения продолжает выводиться также после момента t4 времени, как показано на Фиг.4.
[0069] Другими словами, согласно этому варианту осуществления в случае, если определяется то, что значение определения скорости VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения ниже скорости V1 для запрещения прекращения медленного передвижения, с выдачей крутящего момента для медленного передвижения (момент t1 времени), и затем это состояние продолжается в течение длительности, заданной согласно значению NTM1 определения запрещения прекращения медленного передвижения для таймера (момент t2 времени), определяется то, что значение определения скорости VSP транспортного средства в достаточной степени переходит в область скоростей для запрещения прекращения медленного передвижения ниже скорости V1 для запрещения прекращения медленного передвижения. Следовательно, на этапе S16 флаг NFLAG запрещения прекращения медленного передвижения задается равным «1», чтобы запрещать прекращение медленного передвижения. Соответственно, даже если обычный флаг FLAG разрешения прекращения медленного передвижения задается равным «1» в момент t4 времени в ответ на тормозную силу, увеличенную до уровня, большего или равного значению тормозной силы разрешения прекращения медленного передвижения (включение тормозного переключателя 12) в момент t3 времени, прекращение медленного передвижения не выполняется, так что крутящий момент для медленного передвижения продолжает выводиться также после момента t4 времени, как показано на Фиг.4.
[0070] Если прекращение медленного передвижения реализуется в ответ на FLAG=1 момента t4 времени, у водителя возникает странное ощущение, поскольку уменьшение крутящего момента, вызываемое вследствие этого прекращения медленного передвижения, не связано с действиями при вождении водителя, т.е. не соответствует намерению водителя, как упомянуто выше. Тем не менее согласно этому варианту осуществления можно не допускать возникновения уменьшения крутящего момента, сопутствующего странному ощущению, поскольку крутящий момент для медленного передвижения продолжает выводиться посредством запрещения прекращения медленного передвижения также после момента t4 времени, как показано на Фиг.4.
[0071] Кроме того, в этом варианте осуществления определяется то, что значение определения скорости VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения в случае, если значение определения скорости VSP транспортного средства становится ниже скорости V1 для запрещения прекращения медленного передвижения, которая немного превышает значение, полученное посредством прибавления ошибки определения датчика 7 скорости транспортного средства к 0, но не в случае, если значение определения скорости VSP транспортного средства становится равным 0. Соответственно, определение может осуществляться точно, поскольку ошибка определения датчика 7 скорости транспортного средства исключается. Следовательно, вышеуказанные преимущества могут достигаться в большей степени.
[0072] Кроме того, в этом варианте осуществления определяется то, что значение определения скорости VSP транспортного средства уже переходит в область скоростей для запрещения прекращения медленного передвижения, когда длительность, заданная согласно значению NTM1 определения запрещения прекращения медленного передвижения, истекла в состоянии, в котором значение определения скорости VSP транспортного средства ниже скорости V1 для запрещения прекращения медленного передвижения (в момент t2 времени), но не сразу, когда значение определения скорости VSP транспортного средства становится ниже скорости V1 для запрещения прекращения медленного передвижения (в момент t1 времени). Также с этой точки зрения, определение может выполняться точно, так что вышеуказанные преимущества могут достигаться.
[0073] Поскольку транспортное средство остановлено посредством увеличения тормозной силы после момента t3 времени, значение определения скорости VSP транспортного средства остается ниже скорости V1 для запрещения прекращения медленного передвижения также после момента t4 времени. Поскольку флаг NFLAG запрещения прекращения медленного передвижения не задается равным «0», если значение определения скорости VSP транспортного средства не становится выше или равным скорости V2 для снятия запрещения прекращения медленного передвижения, как пояснено посредством этапов S23, S24 и S26 по Фиг.2, флаг NFLAG запрещения прекращения медленного передвижения поддерживается равным «1». Тем самым запрещение прекращения медленного передвижения продолжает выполняться также после момента t4 времени.
[0074] Фиг.5 является функциональной временной диаграммой в случае, если тормозная сила уменьшается от состояния, в котором прекращение медленного передвижения запрещается в диапазоне передвижения вперед, как показано на Фиг.4, так что медленное передвижение реализуется таким образом, что оно изменяет во времени значение определения скорости VSP транспортного средства, как показано на Фиг.5, и затем тормозная сила постепенно увеличивается таким образом, что значение определения скорости VSP транспортного средства уменьшается, с тем заканчивать медленное передвижение и тем самым останавливать транспортное средство, как показано на Фиг.5.
[0075] В момент t1 времени, в который тормозная сила становится ниже значения тормозной силы разрешения прекращения медленного передвижения посредством вышеуказанного начального уменьшения тормозной силы, тормозной переключатель 12 изменяется из включенного состояния на отключенное состояние. Тем самым условие разрешения прекращения медленного передвижения, связанное с тормозной силой, перестает удовлетворяться, так что обычный флаг FLAG разрешения прекращения медленного передвижения сбрасывается до «0» в момент t1 времени.
[0076] В момент t2 времени значение определения скорости VSP транспортного средства становится выше или равным скорости V1 для запрещения прекращения медленного передвижения посредством медленного передвижения, сформированного посредством уменьшения тормозной силы. Тем самым значение определения скорости VSP транспортного средства выходит из области скоростей для запрещения прекращения медленного передвижения и переходит в гистерезисную область скоростей, так что управляющая программа по Фиг.2 выбирает этапы S13 и S17. Посредством выполнения процесса этапа S17 таймер NTM запрещения прекращения медленного передвижения сбрасывается до 0, как показано на Фиг.5.
[0077] В момент t3 времени значение определения скорости VSP транспортного средства становится выше или равным скорости V2 для снятия запрещения прекращения медленного передвижения посредством дополнительного повышения скорости VSP транспортного средства, вызываемого посредством медленного передвижения. Тем самым управляющая программа по Фиг.2 выбирает контур, включающий в себя этапы S11, S12, S23, S24 и S25. Посредством выполнения процесса этапа S25 таймер YTM снятия запрещения прекращения медленного передвижения увеличивается, и тем самым измеряется истекшее время от момента t3 времени, в который скорость VSP транспортного средства переходит в область скоростей для снятия запрещения прекращения медленного передвижения (заданную посредством VSP≥V2).
[0078] В момент t4 времени, в который показание таймера YTM снятия запрещения прекращения медленного передвижения достигает значения YTM1 определения снятия запрещения прекращения медленного передвижения, процесс этапа S24 распознает, что значение определения скорости VSP транспортного средства уже переходит в область скоростей для снятия запрещения прекращения медленного передвижения, так что программа переходит от этапа S24 к этапу S26. Следовательно, флаг NFLAG запрещения прекращения медленного передвижения сбрасывается до «0» в момент t4 времени, как показано на Фиг.5, так что выдается команда снятия запрещения прекращения медленного передвижения. В момент t5 времени, в который скорость VSP транспортного средства становится ниже скорости V2 для снятия запрещения прекращения медленного передвижения, таймер YTM снятия запрещения прекращения медленного передвижения сбрасывается до «0» на этапе S27.
[0079] Как показано на Фиг.5, обычный флаг FLAG разрешения прекращения медленного передвижения задается равным «1», когда удовлетворяется как условие разрешения прекращения медленного передвижения, связанное со скоростью VSP транспортного средства, так и условие разрешения прекращения медленного передвижения включенного состояния (торможение) тормозного переключателя 12. Более конкретно, обычный флаг FLAG разрешения прекращения медленного передвижения не задается равным «1» до момента t8 времени, в который истек заданный период Δt1 времени, от момента t7 времени, в который остановлено транспортное средство. Следовательно, состояние обычного флага FLAG разрешения прекращения медленного передвижения по-прежнему равно «0» в момент t4 времени, в который выдается команда снятия запрещения прекращения медленного передвижения.
[0080] Следовательно, от момента t1 времени до момента t4 времени по Фиг.5, управляющая программа по Фиг.3 выбирает контур, включающий в себя этапы S51, S55 и S59. От момента t4 времени до момента t8 времени по Фиг.5, управляющая программа по Фиг.3 выбирает контур, включающий в себя этапы S51, S55, S56 и S58. Другими словами, от момента t1 времени до момента t8 времени по Фиг.5, флаг YFLAG выполнения прекращения медленного передвижения поддерживается равным «0», так что прекращение медленного передвижения не осуществляется. Таким образом, медленное передвижение может быть реализовано посредством непрерывного вывода крутящего момента для медленного передвижения, как показано на Фиг.5.
[0081] В момент t6 времени по Фиг.5, значение определения скорости VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения, которая ниже скорости V1 для запрещения прекращения медленного передвижения. В это время управляющая программа по Фиг.2 выбирает контур, включающий в себя этапы S11, S12, S13, S14 и S15. Посредством выполнения процесса этапа S15 таймер NTM запрещения прекращения медленного передвижения увеличивается, так что истекшее время измеряется от момента t6 времени, в который скорость VSP транспортного средства переходит в область скоростей для запрещения прекращения медленного передвижения, заданную посредством VSP<V1.
[0082] В момент t9 времени, в который таймер NTM запрещения прекращения медленного передвижения достигает значения NTM1 определения запрещения прекращения медленного передвижения, процесс этапа S14 определяет то, что скорость транспортного средства уже переходит в область скоростей для запрещения прекращения медленного передвижения (заданную посредством VSP<V1) с выводимым крутящим моментом для медленного передвижения. Тем самым, программа переходит от этапа S14 к этапу S16. Следовательно, флаг NFLAG запрещения прекращения медленного передвижения задается равным «1», так что команда запрещения прекращения медленного передвижения выдается в момент t9 времени.
[0083] От момента t8 времени до момента t9 времени по Фиг.5, состояние флага NFLAG запрещения прекращения медленного передвижения равно «0», и состояние обычного флага FLAG разрешения прекращения медленного передвижения равно «1», как упомянуто выше. Следовательно, в течение периода времени между t8 и t9, сначала управляющая программа по Фиг.3 выбирает контур, включающий в себя этапы S51, S55, S56 и S57, так что флаг YFLAG выполнения прекращения медленного передвижения задается равным «1», а затем управляющая программа по Фиг.3 выбирает контур, включающий в себя этапы S51, S52 и S54, так что флаг YFLAG выполнения прекращения медленного передвижения поддерживается равным «1». Соответственно, от момента t8 времени до момента t9 времени по Фиг.5, крутящий момент для медленного передвижения задается равным 0 посредством выполнения прекращения медленного передвижения в ответ на состояние «1» флага YFLAG выполнения прекращения медленного передвижения.
[0084] После момента t9 времени, управляющая программа по Фиг.3 выбирает контур, включающий в себя этапы S51, S52 и S54, так что прекращение медленного передвижения продолжается. Следовательно, крутящий момент для медленного передвижения постоянно остается равным 0.
[0085] Согласно этому варианту осуществления определяется то, что значение определения скорости VSP транспортного средства становится выше или равным скорости V2 для снятия запрещения прекращения медленного передвижения во время запрещения прекращения медленного передвижения (момент t3 времени). Затем, когда состояние, в котором значение определения скорости VSP транспортного средства выше или равно скорости V2 для снятия запрещения прекращения медленного передвижения, продолжается в течение заданного периода времени, соответствующего значению YTM1 определения снятия запрещения прекращения медленного передвижения (момент t4 времени), запрещение прекращения медленного передвижения снимается (отменяется) посредством задания флага NFLAG запрещения прекращения медленного передвижения равным «0» на этапе S26. Впоследствии, обычное управление прекращением медленного передвижения согласно обычному флагу FLAG разрешения прекращения медленного передвижения может быть выполнено без странного ощущения, как показано посредством периода t8-t9 по Фиг.5.
[0086] Кроме того, согласно этому варианту осуществления определяется то, что значение определения скорости VSP транспортного средства переходит в область скоростей для снятия запрещения прекращения медленного передвижения в случае, если значение определения скорости VSP транспортного средства становится выше или равным скорости V2 для снятия запрещения прекращения медленного передвижения, которая немного превышает значение, полученное посредством прибавления ошибки определения датчика 7 скорости транспортного средства к скорости V1 для запрещения прекращения медленного передвижения, но не в случае, если значение определения скорости VSP транспортного средства становится равным скорости V1 для запрещения прекращения медленного передвижения. Соответственно, определение может осуществляться точно, поскольку ошибка определения датчика 7 скорости транспортного средства исключается. Следовательно, вышеуказанные преимущества могут достигаться в большей степени.
[0087] Кроме того, согласно этому варианту осуществления определяется то, что значение определения скорости VSP транспортного средства уже переходит в область скоростей для снятия запрещения прекращения медленного передвижения, когда длительность, заданная согласно значению YTM1 определения снятия запрещения прекращения медленного передвижения, истекла в состоянии, в котором значение определения скорости VSP транспортного средства выше или равно скорости V2 для снятия запрещения прекращения медленного передвижения (в момент t4 времени). Другими словами, не определяется то, что электромобиль сразу двигается в прямом направлении, когда значение определения скорости VSP транспортного средства становится выше или равным скорости V2 для снятия запрещения прекращения медленного передвижения (в момент t3 времени). Также с этой точки зрения, определение может выполняться точно, так что вышеуказанные преимущества могут достигаться в большей степени.
[0088] В вышеприведенном варианте осуществления операции и преимущества поясняются только в случае, если выбран диапазон передвижения вперед, в качестве характерного примера со ссылкой на Фиг. 4 и 5. Тем не менее даже в случае, если выбран диапазон передвижения задним ходом, управляющая программа по Фиг.2 переходит от этапа S21 к этапу S32 и выбирает контур, включающий в себя этапы S33 в S47. Затем выполняется управление по Фиг.3. Следовательно, могут достигаться операции и преимущества, аналогичные преимуществам в случае диапазона передвижения вперед.
[0089] Кроме того, «прекращение медленного передвижения» согласно варианту осуществления настоящего изобретения не ограничивается сбросом крутящего момента для медленного передвижения до 0. «Прекращение медленного передвижения» согласно варианту осуществления может представлять собой структуру, в которой крутящий момент для медленного передвижения сбрасывается до уровня, еще меньшего обычного небольшого значения для медленного передвижения.
Устройство преобразования мощности
Конструкция оконной секции транспортного средства
Устройство для диагностики неисправностей расходомера воздуха
Конструкция двери транспортного средства
Передняя подпольная конструкция транспортного средства
Устройство для улучшения чувствительности рулевого управления транспортного средства
Батарея плоского типа
Устройство защиты при столкновении транспортных средств
Конструкция размещения блока аккумуляторных батарей транспортного средства
Передняя подпольная конструкция транспортного средства
Устройство преобразования мощности
Конструкция оконной секции транспортного средства
Устройство для диагностики неисправностей расходомера воздуха
Конструкция двери транспортного средства
Передняя подпольная конструкция транспортного средства
Устройство для улучшения чувствительности рулевого управления транспортного средства
Батарея плоского типа
Устройство защиты при столкновении транспортных средств
Конструкция размещения блока аккумуляторных батарей транспортного средства
Передняя подпольная конструкция транспортного средства

