Результат интеллектуальной деятельности: ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ
Вид РИД
Изобретение
Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с шестью степенями свободы.
Целью изобретения является повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по шести координатам. При этом некоторые приводы вращательного движения установлены на каретках, установленных на круглой направляющей. Это дает возможность полного оборота вокруг вертикальной оси. Это важно для многих устройств, например для тренажеров, технологических установок.
В качестве аналога механизма взято устройство - пространственный механизм с шестью степенями свободы (монография J.P. Merlet, Parallel Robots (Second Edition), Springer 2006, (Fig. 2.39, page 54), включающий основание, выполненное в виде круглой направляющей, выходное звено, шесть кинематических цепей, каждая из которых содержит входное звено, выполненное в виде каретки, установленной на основании, начальную сферическую кинематическую пару, сопряженную с входным звеном, и конечную сферическую пару, сопряженную с выходным звеном.
Недостатком данного устройства - аналога является наличие слишком большого количества кинематических цепей, которые могут «мешать» друг другу и ограничивать функциональные возможности механизма, в частности при вращениях вокруг горизонтальных осей.
За прототип механизма взято устройство (монография J.Р. Merlet, Parallel Robots (Second Edition), Springer 2006, (Fig. 2.43, page 56) - пространственный механизм с шестью степенями свободы, включающий основание, выполненное в виде круглой направляющей, выходное звено, три кинематические цепи, каждая из которых содержит входное звено, выполненное в виде каретки, установленной на основании, начальную кинематическую пару и конечную сферическую пару, сопряженную с выходным звеном, причем в двух кинематических цепях начальные кинематические пары выполнены в виде вращательных кинематических пар, а между начальной кинематической парой и конечной сферической парой расположена промежуточная кинематическая пара.
Недостатком данного устройства (прототипа) является наличие лишь трех кинематических цепей, которые не обеспечивают достаточной устойчивости выходного звена механизма.
Технический результат - устранение отмеченного недостатка и повышение технической и эксплуатационной эффективности устройства манипулирования в пространстве.
На фиг.1 представлена принципиальная схема пространственного механизма с шестью степенями свободы.
Примечание: на фиг.1 апострофами (′), (″), (′″), (″″) обозначаются позиции элементов механизма по принадлежности к одной кинематической цепи.
Устройство - пространственный механизм с шестью степенями свободы (фиг.1) включает основание 1, выполненное в виде круглой направляющей, выходное звено 2, четыре кинематические цепи, каждая из которых содержит входное звено 3′, 3″, 3′″, 3″″ выполненные в виде кареток, установленных на основании 1, начальную кинематическую пару 4′, 4″, 5′″, 5″″, сопряженные с входным звеном 3′, 3″, 3′″, 3″″, и конечную сферическую пару 6′, 6″, 6′″, 6″″, сопряженные с выходным звеном 2, причем в двух кинематических цепях между кинематическими парами 4′, 4″ и 6′, 6″ дополнительно установлены промежуточные звенья 7′, 7″ и 8′, 8″, которые соединены между собой вращательными кинематическими парами 9′, 9″ и образуют вращательные кинематические пары 4′, 4″ с входными звеньями 3′, 3″ и выходным звеном 2 посредством сферических кинематических пар 6′, 6″, при этом в двух других кинематических цепях установлены по одному промежуточному звену 10′″, 10″″, которые образуют с выходным звеном 2 и входными звеньями 3′″ и 3″″ сферические кинематические пары 5′″, 5″″ и 4′″, 4″″.
Устройство (Фиг.1) - пространственный механизм с шестью степенями свободы работает следующим образом: относительно основания 1 конечное звено 2 перемещается под действием кинематических цепей. При этом движение передается по двум направлениям от входных звеньев, выполненных в виде кареток 3′, 3″, 3′″, 3″″ и установленных на основании 1. По первому направлению движение передается параллельно по двум кинематическим цепям на начальные кинематические пары 4′, 4″, которые сопряжены с входными звеньями 3′, 3″, далее через промежуточные звенья 7′, 7″ и 8′, 8″, которые связаны соответственно между собой вращательными кинематическими парами 9′, 9″, на конечные сферические пары 6′, 6″ с последующим выходом на звено 2, причем в этих кинематических цепях начальные кинематические пары 4′, 4″ и промежуточные кинематические пары 8′, 8″ выполнены в виде вращательных кинематических пар, а по второму направлению движение передается по двум другим параллельным кинематическим цепям от начальных сферических кинематических пар 4′″, 4″″ на конечные сферические пары 6′″, 6″″ через соответствующие промежуточные звенья 9′″, 9″″ и далее через сферические пары 6′″ и 6″″ на сопряженное с ними выходное звено 2.
Технический результат достигается тем, что в многозвенном пространственном механизме с шестью степенями свободы, содержащим выполненное в виде круглой направляющей основание, выходное звено, кинематические цепи, каждая из которых содержит входное звено, выполненное в виде установленной на основании каретки, начальную кинематическую пару, сопряженную с выходным звеном, и конечную сферическую пару, сопряженную с выходным звеном. Для обеспечения устойчивости выходного звена в предлагаемом устройстве две кинематические цепи содержат начальные и промежуточные вращательные кинематические пары и конечные сферические пары, соединенные с выходным звеном, а две другие кинематические цепи имеют по одному промежуточному звену, которые образуют с входными и выходными звеньями сферические кинематические пары.
Пространственный механизм с шестью степенями свободы, включающий основание, выполненное в виде круглой направляющей, выходное звено, кинематические цепи, каждая из которых содержит входное звено, выполненное в виде каретки, установленной на основании, начальную кинематическую пару, сопряженную с входным звеном, и конечную сферическую пару, сопряженную с выходным звеном, отличающийся тем, что в нем выполнены четыре кинематические цепи, две из которых имеют по два дополнительных промежуточных звена, которые соединены между собой вращательными кинематическими парами, образуют вращательные кинематические пары с входными звеньями и сферические кинематические пары между промежуточными звеньями и выходными звеньями, при этом в двух других кинематических цепях установлены по одному промежуточному звену, которые образуют с входными и выходными звеньями сферические кинематические пары.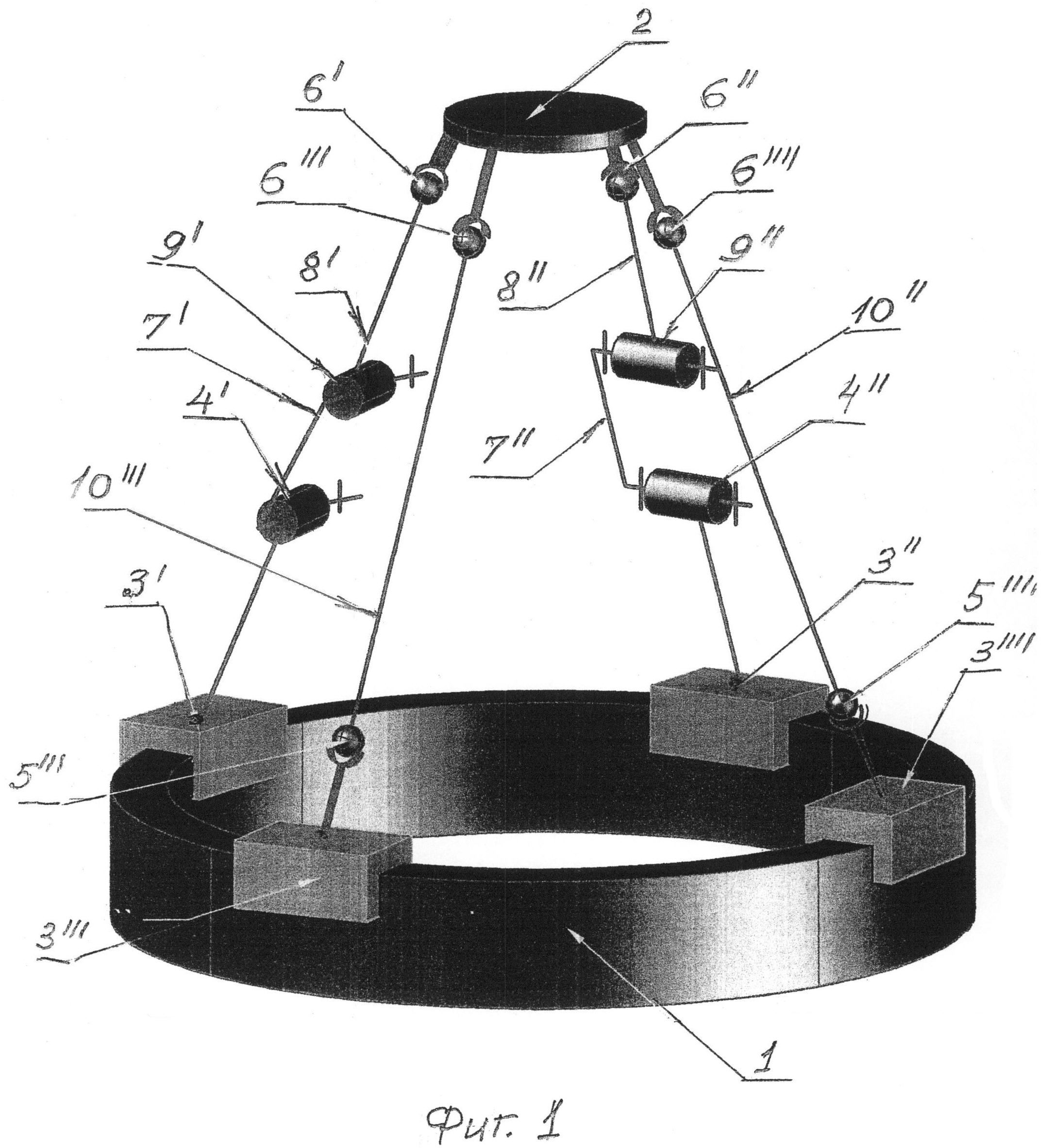
Устройство для циклического погружения и всплытия морского буя
Волновой способ получения карбоксиметилированного крахмала
Стан для раскатки деталей типа тел вращения
Способ моделирования переходных процессов накопления повреждений в диагностируемом объекте и устройство бифуркационной модели
Способ получения покрытия на стальной подложке
Устройство для шлифования пазов дисков газотурбинных двигателей
Способ определения адгезионной прочности тонких твердых покрытий на изделиях
Способ волновой очистки ректификационных колонн от тяжелых нефтяных остатков, содержащих мелкие механические частицы
Многопоточная вально-планетарная коробка передач
Способ изготовления полых валов из жаропрочных сплавов и сталей и устройство для его осуществления
Ориентирующая платформа с шестью степенями свободы

