Результат интеллектуальной деятельности: СЛЕЖЕНИЕ ЗА ПОЛОЖЕНИЕМ ГОЛОВЫ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к системе слежения за положением головы. Изобретение также относится к способу слежения за положением головы. Кроме того, изобретение относится к системе звуковоспроизведения.
Уровень техники
Воспроизведение звука в наушниках типично предоставляет ощущение того, что звук воспринимается "в голове". Разработаны различные алгоритмы виртуализации, которые создают иллюзию нахождения источников звука на конкретном расстоянии и в конкретном направлении. Типично, эти алгоритмы имеют цель аппроксимировать передаточную функцию источников звука (например, в случае стереофонического аудио, двух громкоговорителей перед пользователем) к ушам человека. Следовательно, виртуализация также упоминается как бинауральное воспроизведение звука.
Тем не менее, простое применение фиксированной виртуализации является недостаточным для создания реалистичной иллюзии "не в голове". Направленное восприятие человека, как считается, является очень чувствительным к перемещениям головы. Если виртуальные источники звука перемещаются вместе с перемещениями головы, как в случае фиксированной виртуализации, ощущение "не в голове" значительно ухудшается. Если соотношение между воспринимаемым звуковым полем и положением головы отличается от ожидаемого для компоновки с фиксированными источниками звука, иллюзия/восприятие размещения источника звука существенно ухудшается.
Устранение этой проблемы заключается в том, чтобы применять слежение за положением головы, как предложено, например, в работе P. Minnaar, S.K. Olesen, F. Christensen, H. Moller, "The importance of head movements for binaural room synthesis", Proceedings of the 2001 International Conference on Auditory Display, Эспо, Финляндия, 29 июля - 1 августа 2001 года, в которой положение головы измеряется с помощью датчиков. Алгоритм виртуализации затем адаптируется согласно положению головы так, что он учитывает измененную передаточную функцию от виртуального источника звука к ушам.
Для иллюзии "не в голове" известно то, что микроперемещения головы являются самыми важными, как показано в работе P. Mackensen, "Auditive Localization, Head movements, an additional cue in Localization", Von der Fakultat I - Geisteswissenschaften der Technischen Universitat Berlin. Поворот в горизонтальном направлении головы является намного более важным для локализации источников звука, чем продольный и поперечный наклоны головы. Поворот в горизонтальном направлении, зачастую называемый азимутом, является ориентацией, заданной относительно нейтрального положения головы, и касается поворота головы.
Сегодня доступно множество систем слежения за положением головы (главным образом бытовые наушники или игровые приложения), которые используют, например, ультразвуковую технологию (к примеру, наушники BeyerDynamic HeadZone PRO), инфракрасную технологию (к примеру, NaturalPoint TrackIR plus TrackClip), передающие устройства/приемные устройства, гироскопы (к примеру, Sony MDR-IF8000/MFR-DS8000) или несколько датчиков (к примеру, Polhemus FASTRAK 6DOF). В общем, эти системы слежения за положением головы определяют положение головы относительно окружения либо при помощи фиксированного ориентира со стабильным (инвариантным) положением относительно окружения (например, инфракрасного "маякового радиосигнала или использования магнитного поля Земли"), либо при помощи технологии датчиков, которая после калибровки не смещается значительно во время сеанса прослушивания (например, при помощи высокоточных гироскопов).
Тем не менее, известные системы слежения за положением головы не могут легко использоваться для мобильных вариантов применения, в которых пользователь перемещается. Для таких вариантов применения получение ориентира положения и направления является, в общем, трудным или невозможным, поскольку окружение является главным образом априори неизвестным и находится за рамками управления пользователя.
Сущность изобретения
Цель настоящего изобретения заключается в том, чтобы предоставлять усовершенствованную систему слежения за положением головы, которая может использоваться для мобильного пользователя. Изобретение задается посредством независимых пунктов формулы изобретения. Зависимые пункты формулы изобретения задают преимущественные варианты осуществления.
Система слежения за положением головы, предложенная в изобретении, определяет угол поворота головы пользователя относительно опорного направления, которое зависит от перемещения пользователя. Здесь перемещение пользователя должно пониматься как этап или процесс перемещения, включающий в себя, например, изменения места, положения или позы, такие как принятие положения лежа или сидя в расслабляющем кресле. Система слежения за положением головы согласно изобретению содержит измерительный датчик для измерения перемещения головы, чтобы предоставлять показатель, представляющий перемещение головы, и схему обработки для извлечения угла поворота головы пользователя относительно опорного направления из показателя. Опорное направление, используемое в схеме обработки, зависит от перемещения пользователя.
Преимущество задания опорного направления зависимым от перемещения пользователя состоит в том, что определение угла поворота головы является независимым от окружения, т.е. не привязывается фиксированно к окружению. Следовательно, каждый раз, когда пользователь, например, движется, и его части тела подвергаются перемещению, опорное направление адаптируется к этому перемещению. Неформально можно сказать, что опорное направление перемещается вместе с перемещением пользователя. Например, когда пользователь идет или бежит и бросает короткий взгляд вправо или влево, опорное направление не должно изменяться. Тем не менее, когда при ходьбе или беге пользователь поворачивает, его тело подвергается изменению положения (наклону), что, особенно если долго длится, должно приводить к изменению опорного направления. Это свойство является, в частности, важным, когда устройство слежения за положением головы используется вместе с устройством звуковоспроизведения, содержащим наушники для создания реалистичного ощущения при поддержании впечатления от ощущения "не в голове". Изобретение обеспечивает возможность того, что ориентация виртуального звукового поля не привязывается фиксированно к окрестностям, а перемещается с пользователем. В различных мобильных сценариях, в которых пользователь использует бинауральное воспроизведение, например, на портативном мультимедийном проигрывателе или мобильном телефоне, в ходе своего перемещения, это очень желательное свойство. Алгоритм виртуализации затем адаптируется согласно положению головы так, что он учитывает измененную передаточную функцию от виртуального источника звука к ушам. Для мобильных вариантов применения абсолютная ориентация головы менее релевантна, поскольку пользователь смещается в любом случае. Фиксация образа источника звука относительно земли, следовательно, не требуется.
В варианте осуществления схема обработки дополнительно выполнена с возможностью определять опорное направление как среднее направление головы пользователя во время перемещения пользователя. Когда пользователь выполняет небольшие перемещения головы в то время, когда, например, смотрит прямо вперед, эти небольшие перемещения головы могут точно измеряться относительно опорного направления, которое является прямым направлением. Тем не менее, при повороте головы посредством, например, 45 градусов влево и поддержании головы в этом положении в среднем важно измерять небольшие перемещения головы относительно этого нового положения головы. Использование среднего направления головы в качестве опорного направления, следовательно, является преимущественным, поскольку оно дает возможность адаптации слежения за положением головы к долговременным перемещениям головы (например, взгляду вбок в течение определенного периода времени, превышающего несколько секунд) и/или изменению пути движения пользователя (например, повороту при езде на велосипеде). Предполагается, что при измерении в течение длительного периода времени в среднем направление головы должно типично соответствовать направлению туловища пользователя. Другое преимущество в мобильном варианте применения состоит в том, что датчики слежения за положением головы, в частности акселерометры, демонстрируют смещение, связанное с шумом и нелинейностью датчиков. Это, в свою очередь, приводит к накоплению погрешностей со временем и приводит к раздражающему стационарному смещению положения виртуальных источников звука. Эта проблема, тем не менее, преодолевается при использовании этого изобретения, поскольку предложенное слежение за положением головы является практически нечувствительным к таким накопленным погрешностям.
В дополнительном варианте осуществления измерительный датчик содержит, по меньшей мере, акселерометр для извлечения угловой скорости поворота головы пользователя в качестве показателя на основе центробежной силы, вызываемой посредством поворота. Акселерометр может быть размещен на макушке или, когда используются два акселерометра, на противоположных сторонах головы, предпочтительно близко к ушам. Акселерометры являются в настоящее время экономически недорогим товаром в бытовых вариантах применения. Кроме того, они имеют меньшую потребляемую мощность по сравнению с другими альтернативами, такими как, например, гироскопические датчики.
В дополнительном варианте осуществления схема обработки выполнена с возможностью извлекать среднее направление головы пользователя из угловой скорости головы пользователя. Среднее направление головы получается посредством интегрирования угловой скорости во времени. Таким образом, среднее направление головы рассматривается в качестве оценки направления тела пользователя. Преимущество этого варианта осуществления состоит в том, что дополнительные датчики не требуются для определения углового поворота головы.
В дополнительном варианте осуществления среднее направление определяется как средний угол поворота за предварительно определенный период времени. Например, среднее направление может рассматриваться за скользящее временное окно. Таким образом, средняя ориентация головы, представляющая оцененное направление тела, становится независимой от направления тела задолго до текущего момента, тем самым давая возможность адаптации для оценки к перенаправлению тела пользователя, которое, например, происходит при поворотах во время движения и т.д.
В дополнительном варианте осуществления усреднение является адаптивным. Усреднение может выполняться за предварительно определенный период. Обнаружено, что для больших предварительно определенных периодов получается хорошая характеристика чувствительности к небольшим и быстрым перемещениям головы, тем не менее, она приводит к медленной адаптации к перенаправлению головы. Это обеспечивает субоптимальную производительность для мобильных вариантов применения (например, при поворотах на велосипеде). Наоборот, для небольших значений предварительно определенного периода слежение за положением головы предоставляет плохую характеристику, поскольку оно приводит к нестабильному формированию звуковых образов. Поэтому преимущественным является использование более быстрой адаптации системы слежения за положением головы к большим перенаправлениям, чем к небольшим перенаправлениям. Следовательно, система слежения за положением головы медленно адаптируется к небольшим перемещениям головы, которые, в свою очередь, используются для ощущения виртуализации, и быстро к перенаправлению, являющемуся результатом вождения в плотном потоке или значительных и длительных перемещений головы.
В дополнительном варианте осуществления схема обработки дополнительно выполнена с возможностью использовать направление туловища тела пользователя во время перемещения пользователя в качестве опорного направления. Типично, в стационарном окружении прослушивания громкоговорители размещаются так, что центр такой компоновки (например, представленный посредством физического центрального громкоговорителя) располагается перед телом пользователя. Посредством рассмотрения туловища тела в качестве представления тела пользователя виртуальные источники звука в режиме бинаурального воспроизведения аналогично могут размещаться так, как если они размещаются перед телом пользователя. Преимущество этого варианта осуществления состоит в том, что компоновка виртуальных источников звука зависит исключительно от направления пользователя, а не от окружения. Это исключает необходимость наличия опорных точек, не привязанных к пользователю. Кроме того, настоящий вариант осуществления является очень удобным для мобильных вариантов применения, в которых окружение постоянно изменяется.
В дополнительном варианте осуществления направление туловища тела пользователя определяется как прямое направление тела от опорной точки, расположенной на туловище тела. Например, опорная точка может выбираться в центре грудины или в солнечном сплетении. Преимущество этого варианта осуществления состоит в том, что опорная точка задается по выбору в точке с направлением, которое является стабильным относительно ориентации туловища, и, следовательно, это сокращает необходимость в калибровке опорного направления.
В дополнительном варианте осуществления измерительный датчик содержит магнитное передающее устройство, присоединенное к опорной точке, и магнитный датчик, присоединенный к голове пользователя для приема магнитного поля, передаваемого посредством магнитного передающего устройства. Посредством передачи магнитного поля и измерения принимаемой интенсивности поля ориентация головы может преимущественно измеряться беспроводным и незаметным способом без необходимости в дополнительном физическом или механическом средстве.
В дополнительном варианте осуществления магнитное передающее устройство содержит две ортогональные катушки, размещенные в поперечной плоскости, при этом магнитное поле каждой из двух ортогональных катушек модулируется с помощью различных частот модуляции. Предпочтительно, первая катушка размещается в направлении слева направо, а вторая катушка - в направлении вперед-назад. Таким образом, создаются два магнитных поля с различными ориентациями, которые предоставляют возможность магнитному датчику различать ориентацию относительно двух катушек, например, посредством соотношений между наблюдаемыми интенсивностями поля вместо чувствительности к абсолютным интенсивностям поля. Таким образом, способ становится более устойчивым к изменениям абсолютной интенсивности поля, которые, например, могут являться результатом варьирования расстояния до передающего устройства.
Наличие магнитных полей двух ортогональных катушек, модулированных с помощью различных частот модуляции, в частности, является преимущественным для подавления стационарных искажений магнитного опорного поля вследствие близлежащих ферромагнитных материалов, к примеру столбов, кресел, конструкций в эконом-классе поезда и т.д., или пропускающих материалов, таких как, например, одежда, носимая поверх магнитного передающего устройства или магнитного датчика. Магнитное поле может модулироваться с помощью относительно высокой частоты, предпочтительно в частотном диапазоне 20-30 кГц, так что колебания вне этой полосы частот, к примеру медленные изменения, являющиеся результатом вышеуказанных внешних воздействий, подавляются. Дополнительное преимущество настоящего варианта осуществления состоит в том, что посредством выбора различных частот модуляции для обеих катушек магнитного передающего устройства и при помощи избирательной фильтрации для этих частот в принимаемом магнитном поле в магнитном датчике можно считывать направление головы в двух измерениях с помощью магнитного датчика, содержащего одну катушку.
В дополнительном варианте осуществления магнитный датчик содержит катушку, при этом катушка размещается в предварительно определенном направлении головы пользователя. Это является удобной ориентацией катушки, поскольку она упрощает вычисление угла поворота.
В дополнительном варианте осуществления схема обработки выполнена с возможностью извлекать угол поворота головы пользователя из магнитного поля, принятого посредством магнитного датчика в качестве показателя.
Согласно другому аспекту изобретения предусмотрен способ слежения за положением головы. Следует принимать во внимание, что признаки, преимущества, комментарии и т.д., описанные выше, в равной степени применимы к этому аспекту изобретения.
Изобретение дополнительно предоставляет систему звуковоспроизведения, содержащую систему слежения за положением головы согласно изобретению.
Эти и другие аспекты, признаки и преимущества изобретения должны становиться очевидными и должны истолковываться со ссылкой на описанные далее варианты осуществления.
Краткое описание чертежей
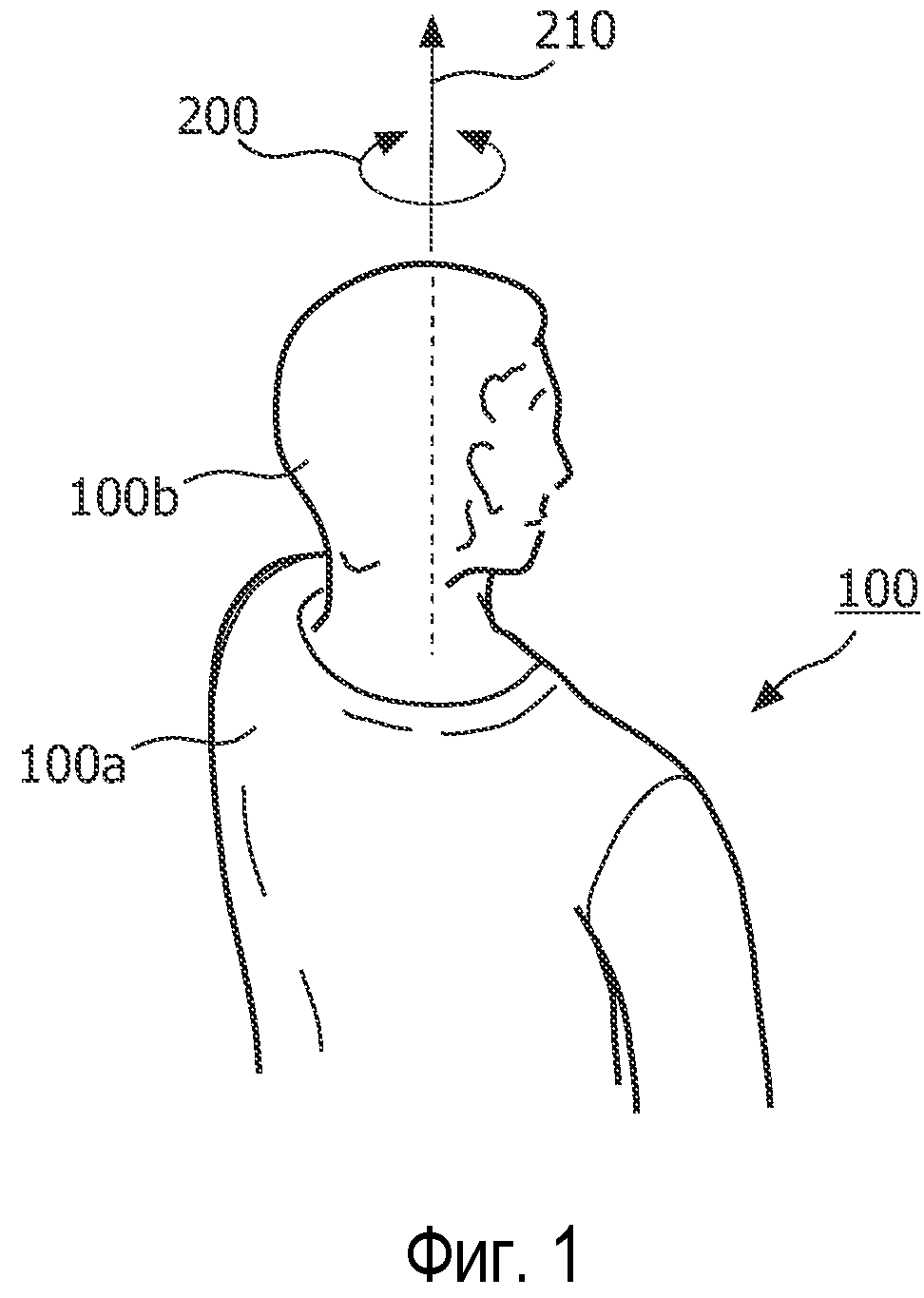
Фиг.1 иллюстрирует поворот головы;
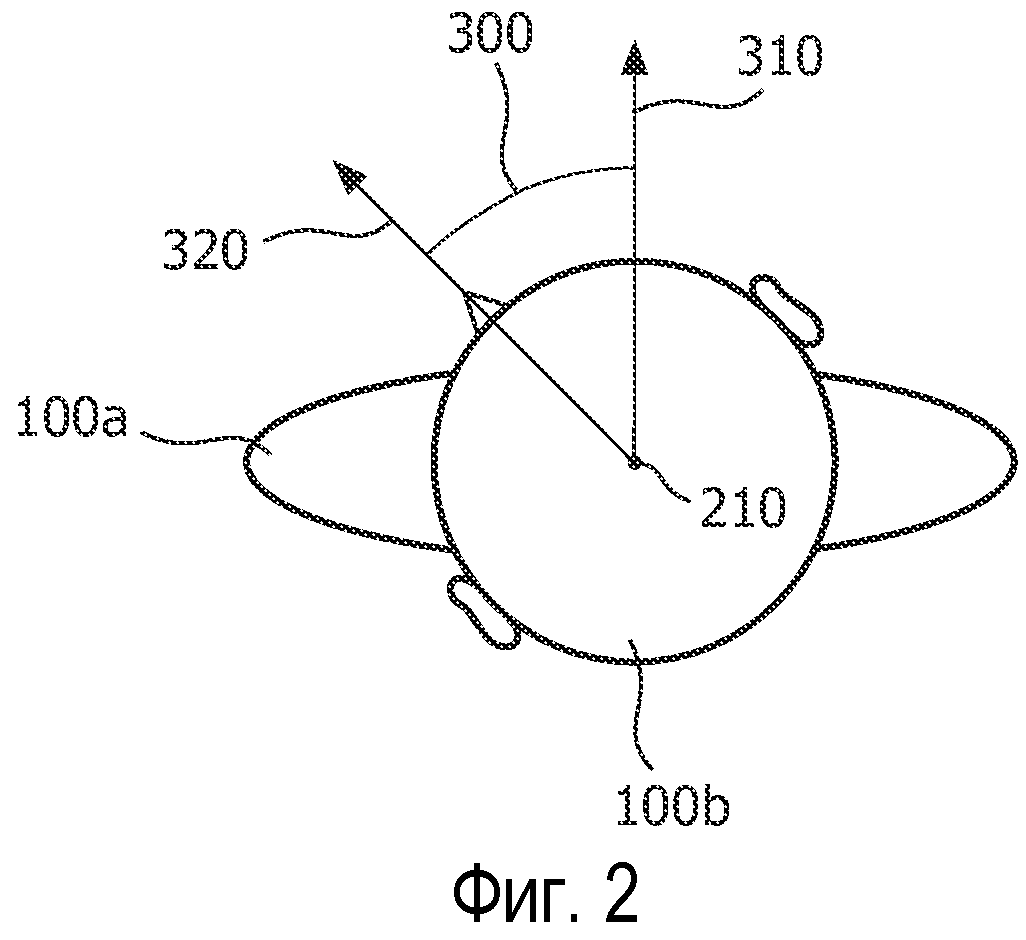
фиг.2 показывает угол поворота головы пользователя относительно опорного направления;
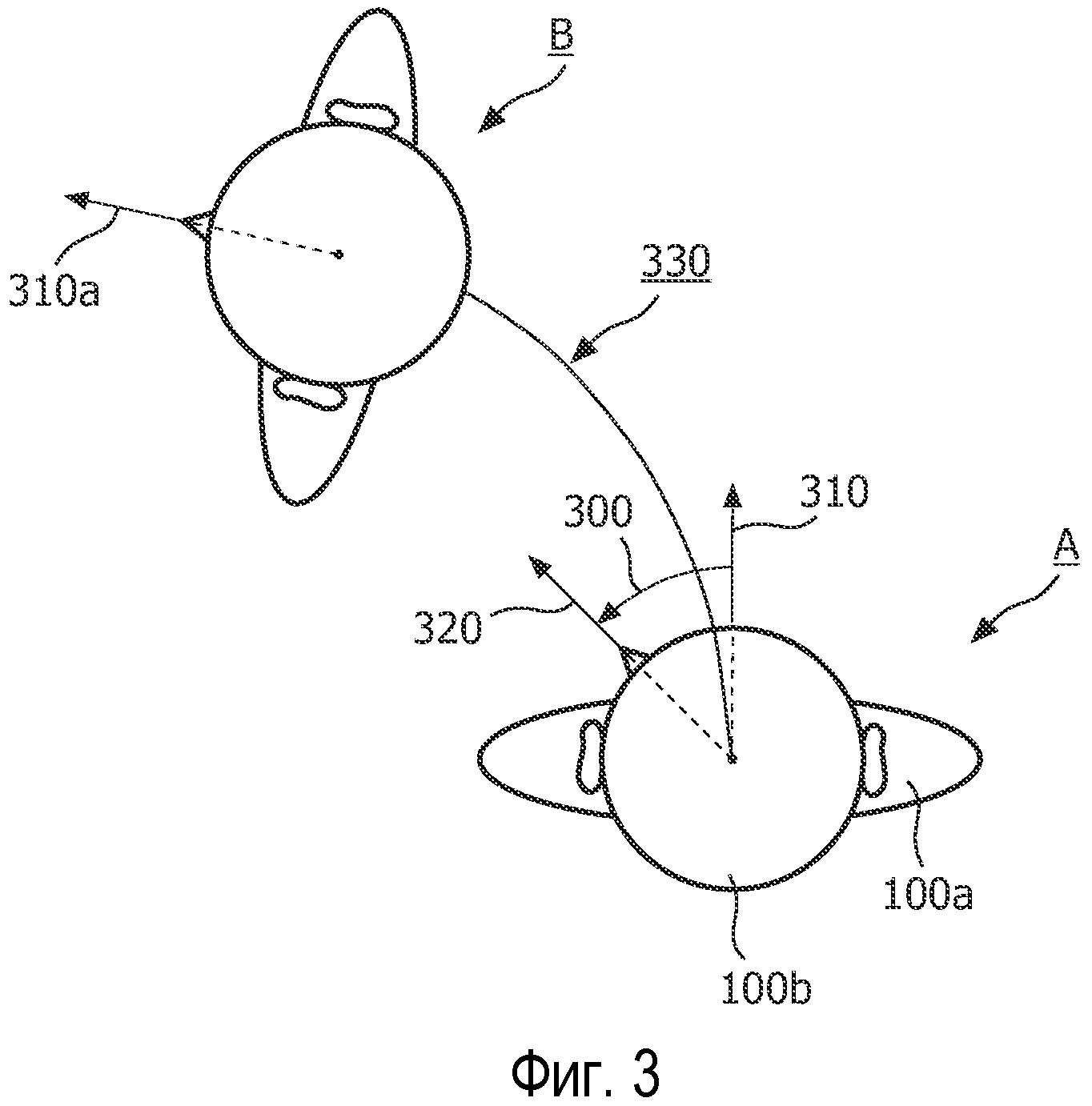
фиг.3 иллюстрирует угол поворота головы пользователя относительно опорного направления, при этом опорное направление зависит от перемещения пользователя;
фиг.4 схематично показывает пример системы слежения за положением головы согласно изобретению, которая содержит измерительный датчик и схему обработки;
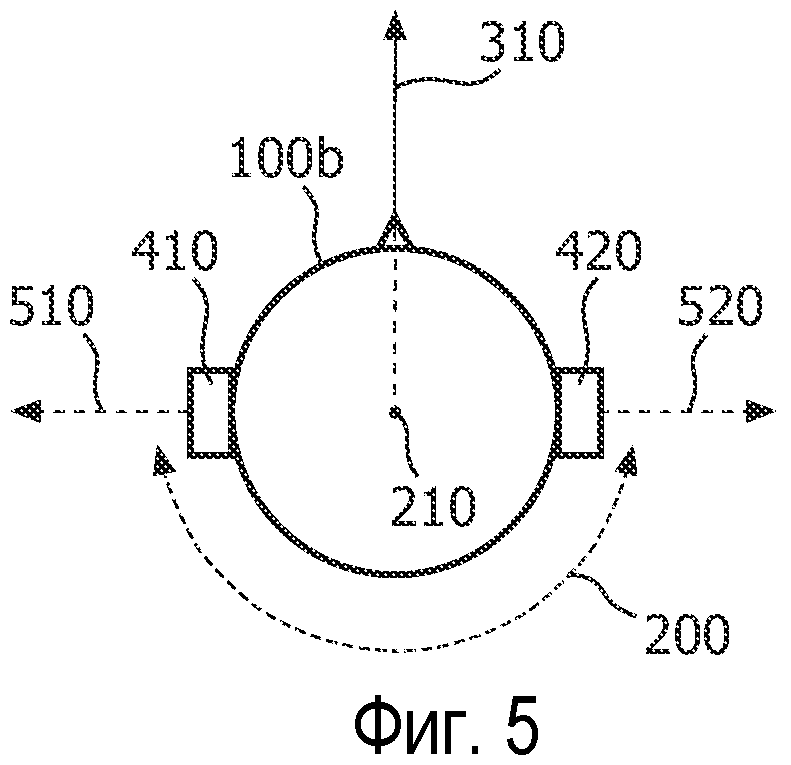
фиг.5 показывает пример измерительного датчика, содержащего, по меньшей мере, один акселерометр для извлечения угловой скорости поворота головы на основе центробежной силы, вызываемой посредством поворота;
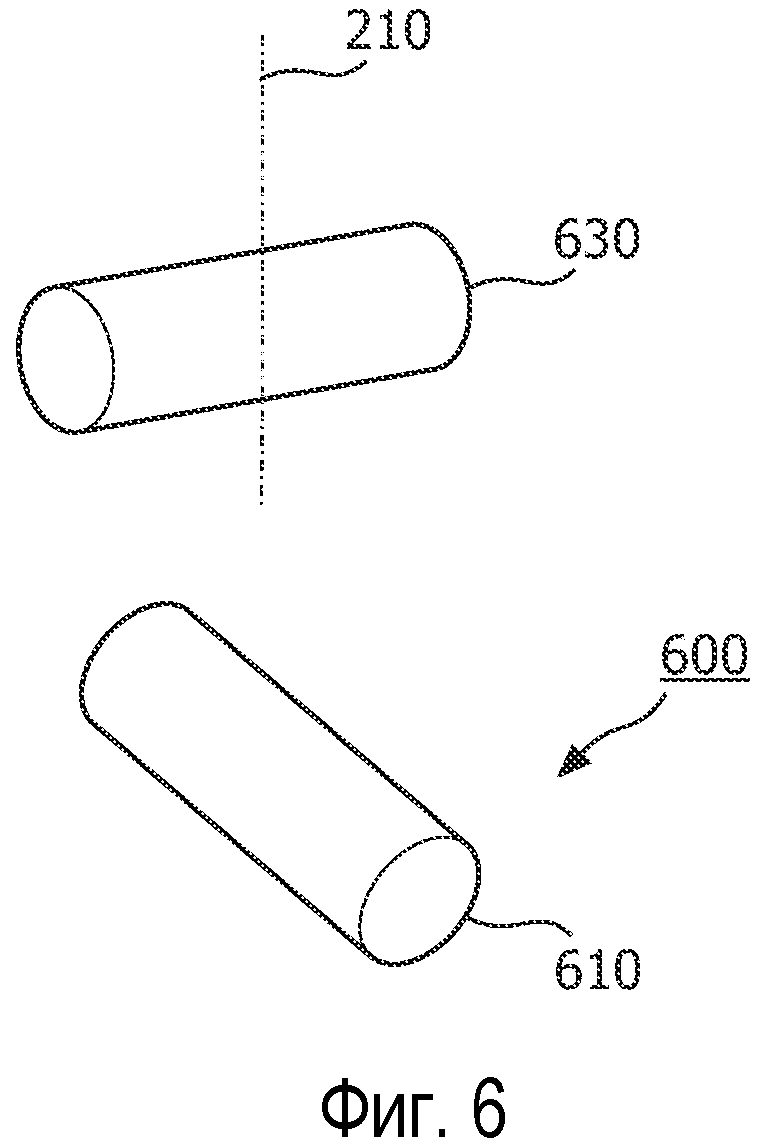
фиг.6 показывает пример измерительного датчика, содержащего магнитное передающее устройство и магнитный датчик для приема магнитного поля, передаваемого посредством магнитного передающего устройства, при этом магнитное передающее устройство содержит одну катушку;
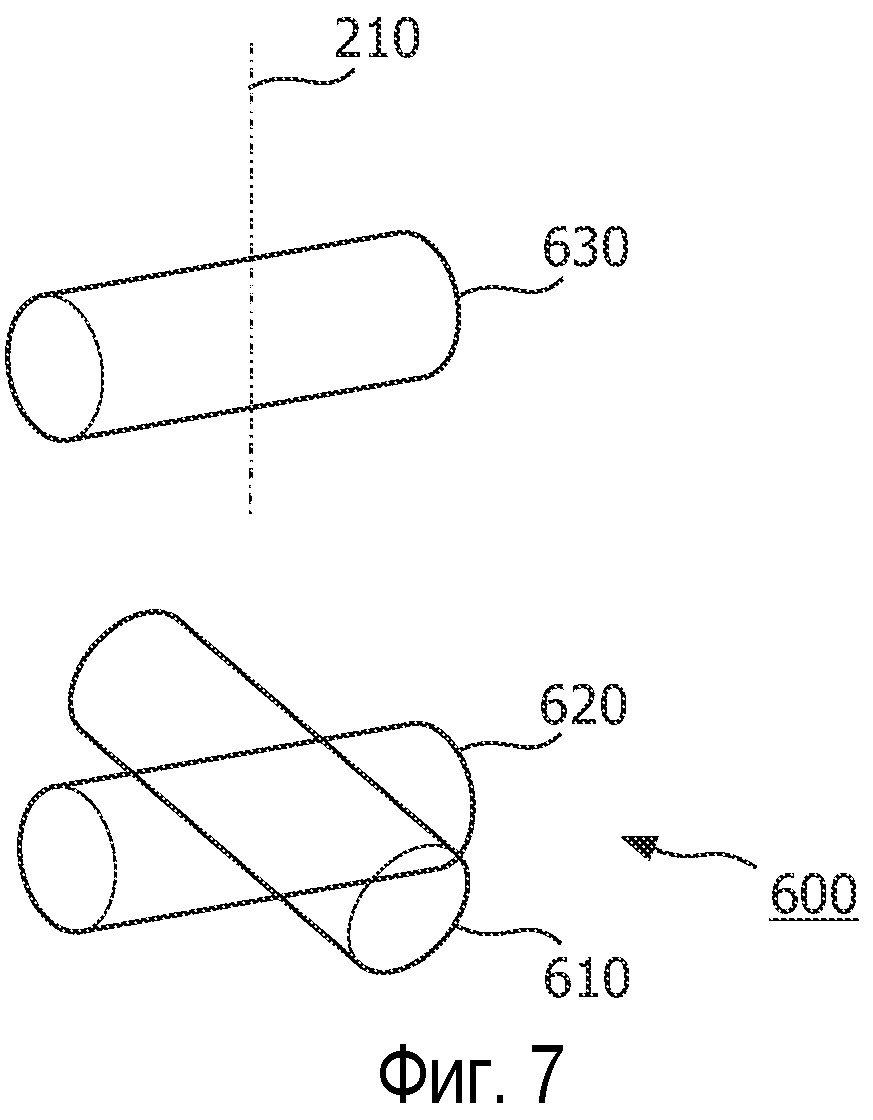
фиг.7 показывает пример измерительного датчика, содержащего магнитное передающее устройство и магнитный датчик для приема магнитного поля, передаваемого посредством магнитного передающего устройства, при этом магнитное передающее устройство содержит две катушки;
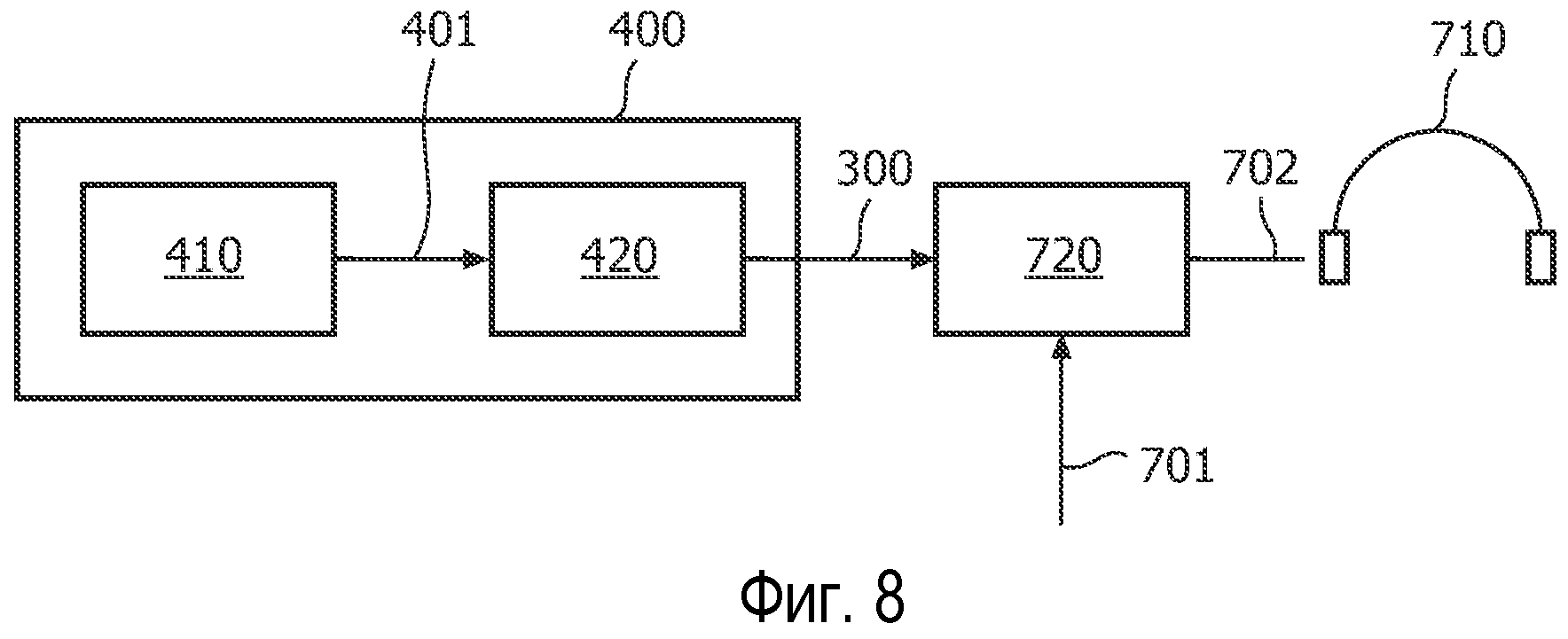
фиг.8 показывает примерную архитектуру системы звуковоспроизведения, содержащей систему слежения за положением головы согласно изобретению; и
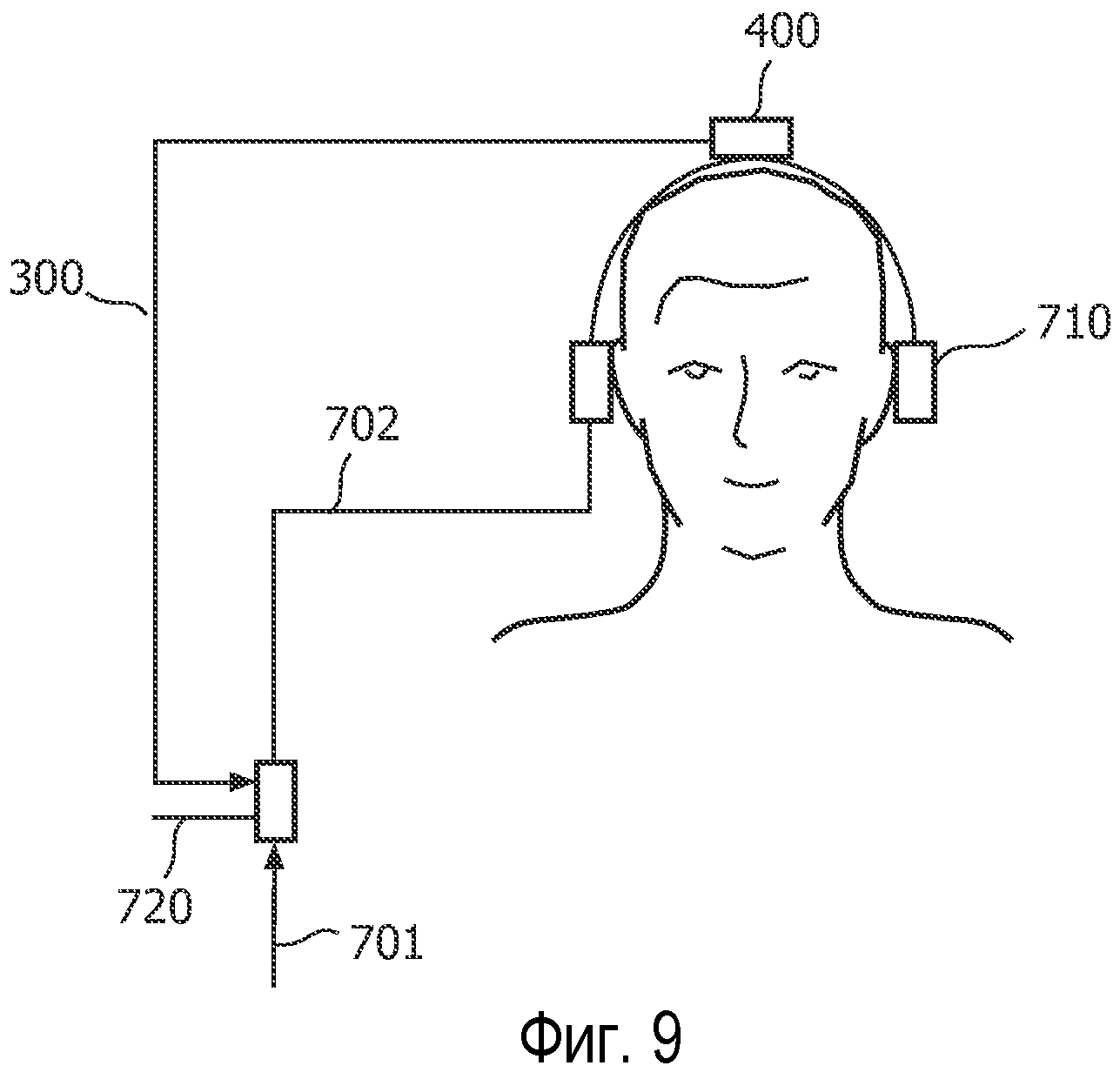
фиг.9 показывает практическую реализацию примерной архитектуры системы звуковоспроизведения, содержащей систему слежения за положением головы согласно изобретению.
Подробное описание вариантов осуществления настоящего изобретения
Настоящее изобретение относится к слежению за положением головы, которое является подходящим для применения к воспроизведению в наушниках для создания реалистичной иллюзии "не в голове".
Фиг.1 иллюстрирует поворот головы. Тело 100 пользователя проиллюстрировано с туловищем 100a тела и головой 100b. Ось 210 является осью поворота головы. Сам поворот проиллюстрирован посредством стрелки 200.
Фиг.2 показывает угол 300 поворота головы 100b пользователя относительно опорного направления 310. Проиллюстрирован вид пользователя 100 сверху. Направление 310 допускается как прямое направление туловища 100a тела, что также допускается как нейтральное направление головы 100b. Прямое направление тела затем определяется как направление, имеющее в качестве ориентира плечи пользователя и обращенное по направлению, в котором ориентировано лицо пользователя. Это прямое направление тела определяется от любого положения тела пользователя, например, пользователь лежит или наполовину сидит, наполовину лежит в расслабляющем кресле. В оставшейся части данного подробного описания используется вышеуказанное задание опорного направления. Тем не менее, другие варианты выбора опорного направления, связанного с частями тела пользователя, также могут использоваться. Направление 310 является опорным направлением для определения угла 300 поворота. Опорное направление зависит от перемещения пользователя 100.
Фиг.3 иллюстрирует угол 300 поворота головы 100b пользователя относительно опорного направления 310, при этом опорное направление 310 зависит от перемещения 330 пользователя. Тело пользователя перемещается по траектории 330 от положения A к положению B. Во время перемещения пользователя его опорное направление 310 изменяется на новое опорное направление 310a, которое отличается от направления 310. Угол поворота в положении A определяется относительно опорного направления 310. Угол поворота в положении B определяется относительно нового опорного направления 310a, которое, хотя определено способом, аналогичным определению прямого направления туловища 100a тела, отличается от направления 310 в абсолютных величинах.
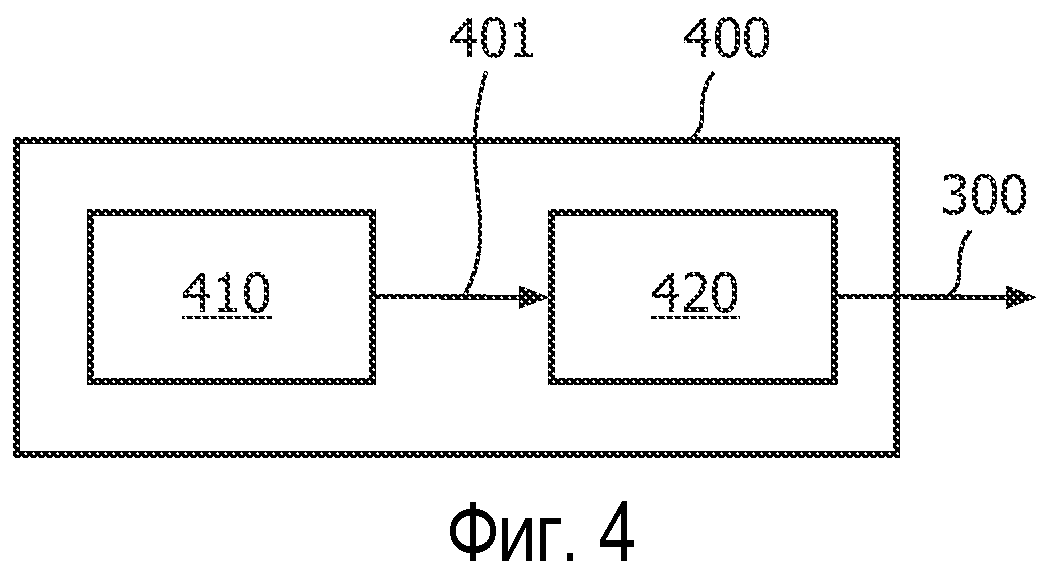
Фиг.4 схематично показывает пример системы 400 слежения за положением головы согласно изобретению, которая содержит измерительный датчик 410 и схему 420 обработки. Измерительный датчик 410 измеряет перемещение головы и предоставляет показатель 401, представляющий перемещение головы, в схему 420 обработки. Схема 420 обработки извлекает угол 300 поворота головы 100b пользователя 100 относительно опорного направления 310 из показателя 401, полученного из измерительного датчика 410. Опорное направление 310, используемое в схеме 420 обработки, зависит от перемещения пользователя 100.
Измерительный датчик 410 может быть реализован с использованием известных сенсорных элементов, таких как, например, акселерометры, магнитные датчики или гироскопические датчики. Каждые из этих различных типов сенсорных элементов предоставляют показатель 401 перемещения, в частности поворот, выраженный как различные физические величины. Например, акселерометр предоставляет угловую скорость поворота, в то время как магнитный датчик предоставляет интенсивность магнитного поля в качестве показателя поворота. Такие показатели обрабатываются посредством схемы обработки так, что они приводят к углу 300 поворота головы. Из схематических видов системы слежения за положением головы является очевидным то, что эта система является замкнутой, и не требуется дополнительная (внешняя, здесь понимаемая как не привязанная к пользователю) ориентировочная информация, ассоциированная с окружением, в котором в настоящее время присутствует пользователь. Опорное направление 310, требуемое для определения угла 300 поворота, извлекается из показателя 401 или является внутренне присущим используемому измерительному датчику 410. Это подробнее поясняется в последующих вариантах осуществления.
В варианте осуществления схема 420 обработки дополнительно выполнена с возможностью определять опорное направление как среднее направление головы пользователя во время перемещения пользователя. С точки зрения цели виртуализации источников звука, при выполнении небольших перемещений вокруг среднего направления головы 100b, таких как, например, взгляд прямо вперед, источники звука остаются в фиксированном положении относительно окружения, в то время как виртуализация источников звука должна перемещать источники звука в направлении, противоположном перемещению, чтобы компенсировать перемещение головы пользователя. Тем не менее, при изменении среднего направления головы 100b, таком как, например, поворот головы 100b на 45 градусов влево, и поддержании головы в новом направлении значительно дольше предварительно определенной постоянной времени виртуальные источники звука должны следовать и перестраиваться относительно нового среднего направления головы. Упомянутая предварительно определенная постоянная времени дает возможность "фиксации" человеческого восприятия к средней ориентации источников звука, при этом позволяя слежению за положением головы адаптироваться к долгосрочным перемещениям головы (например, взгляду вбок в течение более нескольких секунд) и/или изменению пути движения (например, повороту при езде на велосипеде).
Фиг.5 показывает пример измерительного датчика 410, содержащего, по меньшей мере, один акселерометр для извлечения угловой скорости поворота головы 200 на основе центробежной силы, вызываемой посредством поворота 300. Проиллюстрирован вид головы 100b сверху. Фактическое направление головы проиллюстрировано посредством 310. Акселерометры проиллюстрированы посредством элементов 410a и 410b. Центробежная сила, извлеченная из указывающего наружу ускорения, вызываемого посредством поворота, проиллюстрирована посредством 510a и 510b соответственно.
Пояснение того, как угловая скорость поворота головы извлекается из центробежной силы, вызываемой посредством поворота, может быть обнаружено, например, в Diploma thesis в Media Engineering of Marcel Knuth, "Development of the head-tracking solution based on accelerometers for MPEG Surround", 24.09.2007, Philips Applied Technologies University в Applied Sciences Düsseldorf and Philips Research Department of Media. Угловая скорость поворота головы предоставляется в качестве показателя 401 в средство 420 обработки.
Несмотря на то что пример, показанный на фиг.5, иллюстрирует два акселерометра, альтернативно только один акселерометр может использоваться, т.е. акселерометр 410a или 410b.
В дополнительном варианте осуществления схема обработки выполнена с возможностью извлекать среднее направление головы пользователя из угловой скорости головы пользователя. Угол 300 поворота головы получается посредством интегрирования угловой скорости. Абсолютная величина центробежной силы, доступная в измерительном датчике 410, является независимой от направления поворота. Чтобы определять то, поворачивается голова 100b слева направо или справа налево, знак компонента сигнала ускорения в направлении вперед-назад одного или обоих датчиков может использоваться. В таком случае эта дополнительная информация знака должна передаваться из измерительного датчика 410 в схему 420 обработки.
После применения фильтра верхних частот к углу 300 поворота головы получаются изменения угла поворота головы относительно усредненного поворота, зачастую упоминаемого в этом подробном описании как средний поворот. Средний поворот затем считается опорным направлением 310 для определения угла 300 поворота. Типичная постоянная времени для фильтра верхних частот составляет порядка нескольких секунд.
Альтернативно, изменения угла 300 поворота головы относительно среднего поворота могут получаться с использованием фильтрации нижних частот. В таком случае сначала среднее направление, т.е. опорное направление 310, вычисляется с использованием фильтрации LPF() нижних частот, применяемой к фактическому углу  поворота, и затем разность фактического и среднего направления вычисляется, чтобы определять относительное направление, ассоциированное с углом 300 поворота:
поворота, и затем разность фактического и среднего направления вычисляется, чтобы определять относительное направление, ассоциированное с углом 300 поворота:
 ,
,
где:
 .
.
При использовании линейных фильтров нижних частот этот двухэтапный подход является эквивалентным фильтрации верхних частот. Использование фильтрации нижних частот, тем не менее, имеет такое преимущество, что оно предоставляет возможность нелинейного определения, к примеру, с использованием адаптивной фильтрации или гистерезиса, среднего направления на первом этапе.
В дополнительном варианте осуществления среднее направление, а следовательно, опорное направление 310, определяется как средний угол 300 поворота за предварительно определенный период времени. Среднее направление затем определяется посредством рассмотрения среднего направления за предыдущие T секунд согласно следующему выражению:
 .
.
Следует отметить, что усреднение, представленное выше, может рассматриваться как фильтр нижних частот с прямоугольной FIR. Различные значения могут использоваться для T, но предпочтительно в диапазоне 1-10 секунд. Большие значения T обеспечивают хорошую характеристику чувствительности к небольшим и быстрым перемещениям, но они также приводят к медленной адаптации к перенаправлениям. Это работает субоптимально в мобильных случаях (например, во время поворота при езде на велосипеде). Наоборот, небольшие значения T в сочетании с воспроизведением в наушниках приводят к нестабильному формированию образов даже при небольших поворотах головы.
В дополнительном варианте осуществления усреднение является адаптивным. Преимущественным является то, чтобы адаптироваться к большим перенаправлениям, т.е. большим углам поворота, быстрее, чем к небольшим перенаправлениям. Данная адаптивность реализуется посредством задания времени T a усреднения адаптивным. Это может выполняться согласно следующему:
 ,
,
где:
 , и
, и
 .
.
Соотношение R относительного направления принимает свои значения из диапазона [0, 1]. Соотношение R относительного направления принимает максимальное значение 1, если относительное направление равно или превышает данный угол Omax поворота. В этом случае время T a усреднения принимает значение T min. Это приводит к быстрой адаптации для больших мгновенных относительных перенаправлений. Наоборот, медленная адаптация с постоянной T max времени происходит при небольших мгновенных относительных перенаправлениях.
Примерные настройки для параметров Tmin, Tmax и 0max адаптации являются следующими:
Tmin=3с,
Tmax=10с,
Qmax=60°.
Эти значения параметров хорошо подходят с точки зрения характера изменения скорости адаптации, а также для (воображаемого) движения в автомобиле или на велосипеде. К сожалению, адаптивное усреднение, описанное выше, может становиться нестабильным в случае, если направление головы существенно варьируется задолго до текущего момента и только незначительно незадолго до текущего момента. В таком случае постоянная времени усреднения колеблется между минимальными и максимальными значениями T min и T max. Чтобы преодолевать проблему стабильности, FIR-фильтр может заменяться посредством адаптивного IIR-фильтра нижних частот, что приводит к следующей адаптации:
 , где:
, где:
 , и
, и
 .
.
Здесь, частота f c отсечки (а не постоянная времени, как в усредняющих фильтрах) линейно интерполируется между минимальными и максимальными значениями f c,min и f c,max в соответствии с соотношением R относительного направления.
Примерные настройки для параметров f c,min, f c,max и O max адаптации являются следующими:
f c,min = 1/30 Гц,
f c,max = 1/8 Гц,
O max = 90 градусов.
Несмотря на то, что вышеуказанные параметры принимают фиксированные значения, также можно давать возможность варьирования этих значений параметров во времени, чтобы лучше приспосабливаться к ситуациям из реальной жизни, таким как поездка на автомобиле/поезде/велосипеде, ходьба, сидение дома и т.д.
В дополнительном варианте осуществления схема 420 обработки дополнительно выполнена с возможностью использовать направление туловища 100a тела пользователя во время перемещения 100 пользователя в качестве опорного направления 310. Для мобильных вариантов применения абсолютная ориентация головы считается менее релевантной, поскольку пользователь смещается в любом случае. Поэтому является преимущественным то, чтобы принимать указывающее вперед направление туловища тела в качестве опорного направления.
В дополнительном варианте осуществления направление туловища 100a тела пользователя определяется как прямое направление тела опорной точки, расположенной на туловище тела. Такая опорная точка предпочтительно должна быть характерной для направления туловища тела в целом. Она может быть, например, положением грудины или солнечного сплетения, которое демонстрирует минимальные колебания вбок или вверх-вниз, когда пользователь 100 перемещается. Предоставление самого опорного направления может быть реализовано при помощи, например, явного опорного устройства, которое должно носиться в известном местоположении на туловище 100a тела, которое является относительно стабильным. Например, это может быть пристегивающееся устройство на ремне.
Фиг.6 показывает пример измерительного датчика 410, содержащего магнитное передающее устройство 600 и магнитный датчик 630 для приема магнитного поля, передаваемого посредством магнитного передающего устройства 600, при этом магнитное передающее устройство содержит одну катушку 610. Опорное направление предоставляется посредством магнитного передающего устройства 610, которое находится в опорной точке на туловище 100a тела. Магнитный датчик 630 присоединен к голове 100b. В зависимости от поворота головы 100b, магнитное поле, принятое посредством магнитного датчика 630, варьируется соответствующим образом. Магнитное поле, принятое посредством магнитного датчика 630, является показателем 401, который предоставляется в схему 420 обработки, при этом угол 300 поворота извлекается из показателя 401.
Из интенсивности поля угол 300 поворота может быть определен следующим образом. В оси 210, на расстоянии, которое является относительно большим по сравнению с катушкой передающего устройства, линии магнитного поля передаваемого поля приблизительно равномерно распределяются и идут параллельно ориентации катушки передающего устройства. Когда катушка приемного устройства, содержащаяся в магнитном датчике 630, размещается параллельно катушке передающего устройства на данном расстоянии, принимаемая интенсивность поля равна чистому значению B 0. При повороте катушки приемного устройства на угол α принимаемая интенсивность B(α) поля становится следующей:
 .
.
Также угол поворота головы может извлекаться из принимаемой интенсивности поля следующим образом:
 .
.
Следует отметить, что арксинусная функция преобразует интенсивность поля в угол [-90°, 90°]. Но по своему характеру угол поворота головы также ограничен диапазоном 180° (от крайнего левого до крайнего правого). Посредством размещения катушки передающего устройства слева направо или наоборот поворот головы может однозначно отслеживаться в полном диапазоне 180°.
Фиг.7 показывает пример измерительного датчика, содержащего магнитное передающее устройство 600 и магнитный датчик 630 для приема магнитного поля, передаваемого посредством магнитного передающего устройства 600, при этом магнитное передающее устройство содержит две катушки 610 и 620. Эти две катушки 610 и 620 размещаются ортогонально, при этом первая катушка 610 размещается в направлении слева направо, а вторая катушка 620 - в направлении вперед-назад. Магнитное поле, созданное посредством каждой из двух ортогональных катушек, модулируется с помощью различных частот модуляции. Это в комбинации с избирательной фильтрацией этих частот (типично, например, при 20-40 кГц) в магнитном датчике дает возможность считывания ориентации в двух направлениях просто с помощью одной катушки в магнитном датчике следующим образом. Принимаемое поле состоит из суммы двух компонентов, по одному из каждой из этих двух катушек передающего устройства 610 и 620:
 .
.
Посредством фильтрации два компонента могут быть отделены, и соотношение R их пиковых значений может быть определено следующим образом:
 .
.
Посредством обеспечения того, что передаваемые компоненты магнитного поля имеют идентичную интенсивность в передающем устройстве и тем самым идентичную пиковую интенсивность в приемном устройстве (B0,610,peak=B0,620,peak), это может упрощаться до следующего:
 ,
,
и угол поворота головы может извлекаться из соотношения R принимаемых пиковых интенсивностей поля следующим образом:
 .
.
Следует отметить, что в этом варианте осуществления угол поворота головы является независимым от абсолютной интенсивности поля, например, являющейся результатом варьирования расстояния между катушками передающего и приемного устройства, по сравнению с вышеуказанным вариантом осуществления с одной катушкой передающего устройства, который зависит от абсолютной интенсивности поля.
Должно быть очевидным то, что показатель 401 содержит магнитное поле, принятое от катушек 610 и 620. Альтернативно, когда оба этих поля имеют идентичную интенсивность передачи, соотношение R может предоставляться в схему 420 обработки. Извлечение угла поворота либо из магнитных полей, принятых посредством магнитного датчика 630, либо из соотношения R выполняется в схеме 420 обработки.
Альтернативно магнитному передающему устройству и магнитному датчику, трехмерные акселерометры могут использоваться, при этом один трехмерный акселерометр размещается в опорной точке, а второй акселерометр присоединен к голове пользователя. Разность измерений этих двух акселерометров затем может использоваться для того, чтобы вычислять угол поворота.
Фиг.8 показывает примерную архитектуру системы 700 звуковоспроизведения, содержащей систему 400 слежения за положением головы согласно изобретению. Угол 300 поворота головы получается в системе 400 слежения за положением головы и предоставляется в процессор 720 рендеринга. Процессор 720 рендеринга также принимает аудио 701, которое должно воспроизводиться в наушнике 710.
Система 700 звуковоспроизведения реализует воспроизведение аудиосцен в наушнике 710, предоставляя реалистичную иллюзию "не в голове". Процессор 720 рендеринга подготавливает посредством рендеринга аудио так, что аудиосцена, ассоциированная с аудио 701, поворачивается на угол, противоположный углу поворота головы. Аудиосцена должна пониматься как виртуальное местоположение источников звука, содержащихся в аудио 701. Без дальнейшей обработки аудиосцена, воспроизведенная в наушнике 710, перемещается вместе с перемещением головы 100b, поскольку оно ассоциировано с наушником, который перемещается вместе с головой 100b. Чтобы делать воспроизведение аудиосцен более реалистичным, аудиоисточники должны оставаться в неизменных виртуальных местоположениях, когда голова вместе с наушником поворачивается. Этот эффект достигается посредством поворота аудиосцены на угол, противоположный углу поворота головы 100b, который выполняется посредством процессора 720 рендеринга.
Угол поворота согласно изобретению определяется относительно опорного направления, при этом опорное направление зависит от перемещения пользователя. Это означает, что в случае, если опорное направление является средним направлением головы пользователя во время перемещения пользователя, аудиосцена централизованно подготавливается посредством рендеринга относительно этого опорного направления. В случае если опорное направление является направлением туловища тела пользователя во время перемещения пользователя, аудиосцена централизованно подготавливается посредством рендеринга относительно этого опорного направления, следовательно, оно фиксированно привязывается к положению туловища.
Традиционный бинауральный рендеринг многоканального аудиосигнала осуществляется посредством свертки многоканального аудиосигнала посредством импульсных характеристик на основе HRTF:
 ,
,
 ,
,
где  и
и  представляют левые и правые импульсные характеристики на основе HRTF, соответственно, для угла
представляют левые и правые импульсные характеристики на основе HRTF, соответственно, для угла  ,
,  представляет компонент многоканального аудиосигнала, соответствующий углу
представляет компонент многоканального аудиосигнала, соответствующий углу  , и где
, и где  представляет длину импульсных характеристик. Бинауральный выходной сигнал описывается посредством левых и правых сигналов l[n] и r[n] соответственно. Для типичного многоканального расположения набор углов
представляет длину импульсных характеристик. Бинауральный выходной сигнал описывается посредством левых и правых сигналов l[n] и r[n] соответственно. Для типичного многоканального расположения набор углов  состоит из
состоит из  с использованием углового представления по часовой стрелке для левого переднего, центрального, правого переднего динамика, левого динамика объемного звучания и правого виртуального динамика объемного звучания соответственно.
с использованием углового представления по часовой стрелке для левого переднего, центрального, правого переднего динамика, левого динамика объемного звучания и правого виртуального динамика объемного звучания соответственно.
В случае использования слежения за положением головы дополнительный изменяющийся во времени угол смещения может применяться следующим образом:
 ,
,
 ,
,
где  является углом смещения (слежения за положением головы), который соответствует углу О(t)
relative поворота, определенному посредством системы слежения за положением головы согласно изобретению с использованием углового представления по часовой стрелке. Угол напротив угла поворота здесь реализуется посредством знака "-", предшествующего углу
является углом смещения (слежения за положением головы), который соответствует углу О(t)
relative поворота, определенному посредством системы слежения за положением головы согласно изобретению с использованием углового представления по часовой стрелке. Угол напротив угла поворота здесь реализуется посредством знака "-", предшествующего углу  поворота. Следовательно, модифицированное аудио 702, содержащее модифицированную сцену источника звука, предоставляется в наушник 710.
поворота. Следовательно, модифицированное аудио 702, содержащее модифицированную сцену источника звука, предоставляется в наушник 710.
Фиг.9 показывает практическую реализацию примерной архитектуры системы 700 звуковоспроизведения, содержащей систему 400 слежения за положением головы согласно изобретению. Система слежения за положением головы присоединяется к наушнику 710. Угол 300 поворота, полученный посредством системы 400 слежения за положением головы, передается в процессор 720 рендеринга, который поворачивает аудиосцену в зависимости от угла 300 поворота. Модифицированная аудиосцена 702 предоставляется в наушник 710.
Предпочтительно, чтобы система слежения за положением головы, по меньшей мере, частично интегрировалась с наушником. Например, акселерометр может быть интегрирован в одну из ушных вставок наушника. Магнитный датчик также может быть интегрирован в сам наушник либо в одной из ушных вставок, либо в перемычке, соединяющей ушные вставки.
Процессор рендеринга может быть интегрирован в портативное устройство звуковоспроизведения, которое пользователь берет с собой на прогулку, или в сам беспроводной наушник.
Хотя настоящее изобретение описано в связи с некоторыми вариантами осуществления, оно не имеет намерение быть ограниченным конкретной изложенной в данном документе формой. Вместо этого, объем настоящего изобретения ограничен только посредством прилагаемой формулы изобретения. Дополнительно, хотя предположительно признак описывается в данном документе в связи с конкретными вариантами осуществления, специалисты в данной области техники должны признавать, что различные признаки описанных вариантов осуществления могут быть комбинированы в соответствии с изобретением. В формуле изобретения термин "содержащий" не исключает наличия других элементов или этапов.
Более того, хотя перечислены по отдельности, множество схем, элементов или этапов способа может быть реализовано посредством, к примеру, одного блока или процессора. Дополнительно, хотя отдельные признаки могут быть включены в различные пункты формулы изобретения, они могут быть преимущественно комбинированы, и их включение в различные пункты формулы изобретения не подразумевает, что комбинация признаков является невыполнимой и/или преимущественной. Также, включение признака в одну категорию пунктов формулы изобретения не налагает ограничение на эту категорию, а вместо этого указывает то, что признак в равной степени применим к другим категориям пунктов формулы изобретения по мере необходимости. Кроме того, ссылки в единственном числе не исключают множественность. Таким образом, ссылки на "a", "an", "первый", "второй" и т.д. не исключают множественность. Номера ссылок в формуле изобретения предоставлены просто в качестве поясняющего примера и не должны истолковываться как ограничивающие объем формулы изобретения каким-либо образом. Изобретение может быть реализовано посредством схемы аппаратных средств, содержащих несколько различных элементов, и посредством схемы надлежащим образом запрограммированного компьютера или другого программируемого устройства.
Спинодержатель для автоматизированной системы cpr
Управление затеняющим устройством посредством распознавания изображений
Встраивание и извлечение служебных данных
Венчик для взбивания и смесительное устройство с венчиком для взбивания
Устройство управления абляцией для мониторинга в реальном времени смещения ткани в ответ на приложенную силу
Бутылочка, обеспечивающая безопасную температуру
Направляющая система для биопсии с ультразвуковым преобразователем и способ ее использования
Система, способ и аппарат для инструктирования устройству входить в активный режим
Оконные жалюзи для сбора солнечной энергии с регулируемым положением
Система визуализации с массивом из множества детекторов
Осветительное устройство
Детектор рентгеновского излучения для формирования фазово-контрастных изображений
Светоизлучающее устройство бокового действия с преобразованием длины волны
Эпилятор, имеющий приводимый массажирующий элемент
Набор изделий, которые являются пригодными для использования в процессе приготовления напитка
Беспроводное наблюдение за пациентом с использованием потоковой передачи медицинских данных с помощью связанного с телом соединения
Модульное осветительное устройство
Устройство вывода автостереоскопического изображения
Безопасное стартерное устройство
Квазистатическая установка с распределенными источниками для рентгеновской визуализации с высокой разрешающей способностью

