Результат интеллектуальной деятельности: СПОСОБ ВЫДЕЛЕНИЯ ПРОТЯЖЕННЫХ ЛИНЕЙНЫХ ОБЪЕКТОВ НА АЭРОКОСМИЧЕСКИХ ИЗОБРАЖЕНИЯХ
Вид РИД
Изобретение
Изобретение относится к вычислительной технике и может быть использовано для определения протяженных объектов на космических снимках при создании электронных карт для геоинформационных систем.
Известен способ распознавания объектов на основе фрактально-вейвлетного анализа (пат. №2440608 РФ, МПК G06K 9/00 (2006.01), 02.12.2010), заключающийся в применении вейвлет-преобразования к изображению, в результате получения аппроксимирующего изображения-массива (А) более крупного масштаба и четырех детализирующих изображений-массивов для горизонтальных, вертикальных и диагональных деталей (Н, V, D), применения этого преобразования итеративно к матрице А для каждого уровня изображения, получения, таким образом, многоуровневое разложение изображения по масштабам, кратности 2, позволяющее на основе фрактальной размерности проводить анализ и распознавание объекта вне зависимости от ракурса наблюдения и воздействия помех.
Недостатками данного способа являются вычислительная сложность, обусловленная применением вейвлет-преобразования и разложением изображения по масштабам, вследствие этого, низкое быстродействие при использовании крупномасштабных изображений, недостаточная точность при распознавании протяженных линейных объектов.
Наиболее близким к предлагаемому способу является способ кодирования информации о географических системах по изображениям (пат. №2374689 РФ, МПК G06T 17/50 (2006.01), 27.11.2009), суть которого заключается в следующем: в дополнительном навигационном окне интерфейса программы автоматизации кодирования выдают документ, определяющий совокупность правил кодирования элементов географической системы, который обладает функциональностями, соответствующими типам элементов географической системы и позволяющими автоматизировать все или часть операций по кодированию информации об элементах этих типов, и средствами броузерообразной навигации, позволяющими переходить от описания правил кодирования данного типа элементов географической системы к описаниям правил кодирования другого типа элементов географической системы, структурно связанных с элементами данного типа в силу общих стандартов систем данного типа. После этого выбирают место в указанном документе, описывающее правила кодирования объектов того типа, который имеет очередной элемент географической системы, выполняют соответствующие действия по кодированию информации об этом элементе, затем кодируют информацию обо всех или части связанных с ним элементах системы, используя для этого автоматический переход в указанном документе к правилам кодирования соседних элементов с помощью указанных средств броузерообразной навигации.
Недостатками данного способа являются сложность реализации, связанная с необходимостью хранения множества классификаторов и атрибутов объектов, вероятность возникновения ошибки, обусловленная необходимостью анализа оператором большого количества входных данных.
Технической задачей изобретения является повышение точности выделения протяженных линейных объектов на аэрокосмических снимках.
Задача решается тем, что в известный способ выделения протяженных линейных объектов, включающий получение изображения в цифровой форме, предварительную обработку изображения и выделение протяженных линейных объектов, добавлена обработка изображения с использованием КИХ-фильтра, позволяющего определить точки, принадлежащие протяженным линейным объектам изображения по положительному отклику КИХ-фильтра, основанному на анализе значений среднего квадратического отклонения (СКО) яркости точек окна фильтра при повороте окна фильтра относительно каждой исследуемой точки изображения.
Изобретение может быть использовано для выделения объектов дорожной сети при создании электронных карт на основе аэрокосмических снимков для геоинформационных систем и соответствует критерию «промышленная применимость».
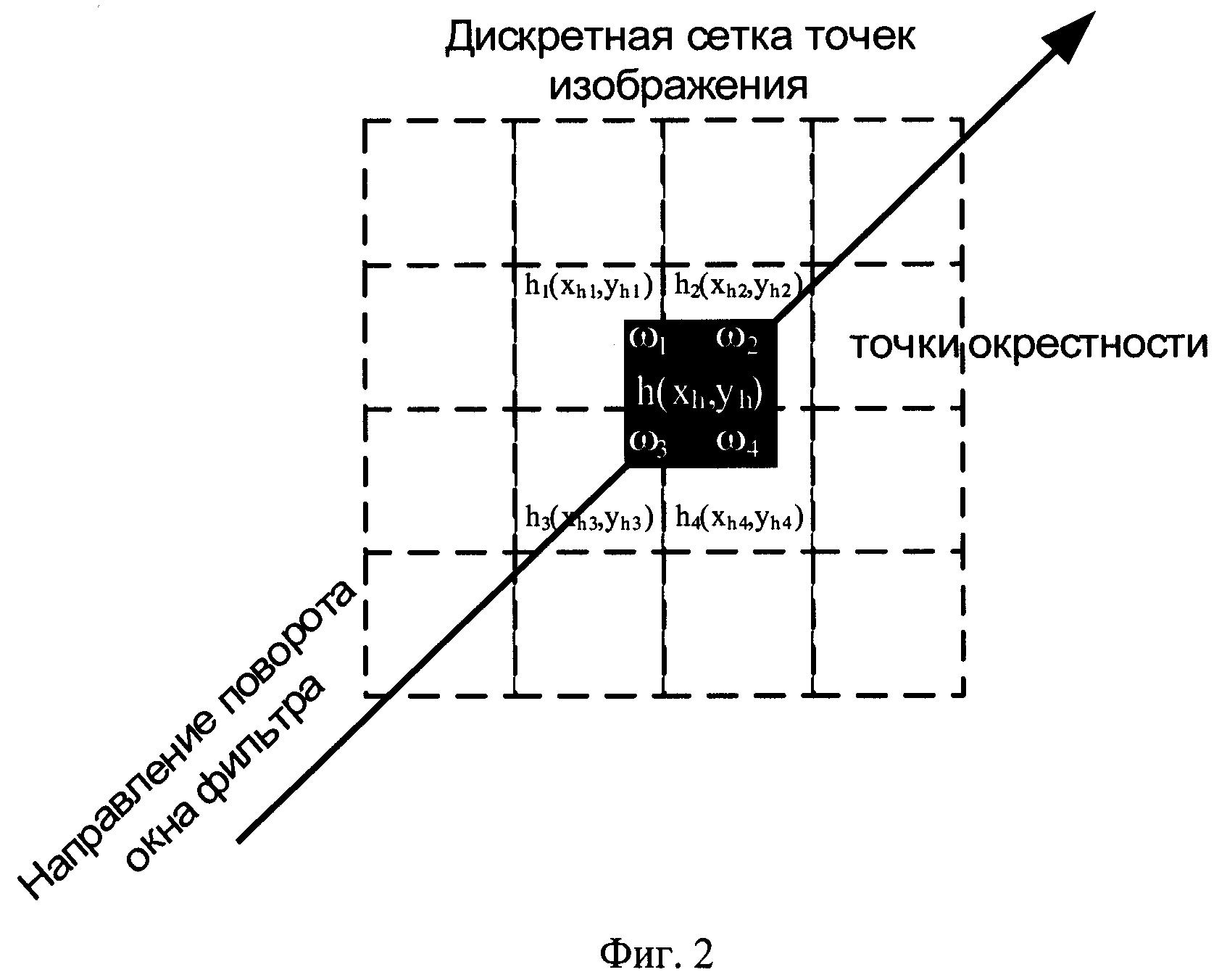
Сущность изобретения поясняется чертежами, где на фиг.1 изображена схема поворота окна фильтра относительно некоторой точки, на фиг.2 изображен рисунок, поясняющий способ определения значения яркости точки в дискретном пространстве, на фиг.3 и фиг.4 изображена блок-схема алгоритма выделения протяженных линейных объектов на аэрокосмических изображениях.
Способ заключается в определении точек изображения с положительным откликом КИХ-фильтра, построении на их основе карты СКО и карты углов поворота окна КИХ-фильтра, выделении протяженных линейных объектов согласно полученным картам.
Для каждой точки изображения определяется значение функции отклика КИХ-фильтра. Для этого в точке исследуются функция отклика фильтра при каждом положении окна фильтра, поворачиваемого относительно точки с шагом угла поворота φ.
На фиг.1 представлена схема поворота окна фильтра относительно исследуемой точки. Окно фильтра представляет собой прямолинейный отрезок, центром которого является исследуемая точка изображения. Таким образом, ширина окна фильтра равна одной точке, длина L окна фильтра задается.
Угол α поворота окна фильтра находится в диапазоне от нуля до ста восьмидесяти градусов, включая значение нуля градусов: [0°; 180°). Количество возможных положений окна фильтра равно количеству углов поворота Nφ, на которое разбивается диапазон [0°; 180°). Шаг угла поворота φ вычисляется как:

Исследуется отрезок, равный половине длины окна фильтра, что обусловлено симметричностью координат точек окна фильтра относительно исследуемой точки изображения (центра координат), а также необходимостью дополнительной проверки для исключения точек, не принадлежащих искомым объектам. Поэтому для одного положения окна фильтра определяется два значения СКО для каждой половины окна фильтра. К первой половине окна фильтра относятся точки с положительным смещением координат относительно оси Y, для них вычисляется первое значение СКО. Ко второй половине окна фильтра относятся точки с отрицательным смещением координат относительно оси Y, для них вычисляется второе значение СКО. Расчеты проводятся для каждого положения окна фильтра определяемого углом поворота относительно исследуемой точки. Все первые значения СКО для всех исследуемых положений окна фильтра формируют первую группу значений СКО, все вторые значения СКО для всех исследуемых положений окна фильтра формируют вторую группу значений СКО.
Математическое ожидание М(1), дисперсия D(l) и СКО σ(1) дискретной случайной величины f(x,y) половины окна КИХ-фильтра некоторого положения 1 вычисляются согласно известным формулам теории вероятности [Кочетков П.А. Краткий курс теории вероятностей и математической статистики / П.А.Кочетков. Учебное пособие - Москва, МГИУ, 1999]:
где i - некая точка половины окна фильтра; L - длина окна фильтра; f(xi,yi)
- значение функции яркости в некой точке i половины окна фильтра.

где i - некая точка половины окна фильтра; М(l) - математическое ожидание дискретной случайной величины f(x,y) половины окна фильтра некоторого положения l; L - длина окна фильтра; f(xi,yi) - значение функции яркости в некой i-й точки половины окна фильтра.

где D(l) - дисперсия случайной величины f(x,y) половины окна фильтра некоторого положения l окна фильтра.
Среди найденных значений СКО всех положений окна фильтра определяется минимальное σ1 для первой группы значений СКО и минимальное σ2 для второй группы значений СКО.
Найденные значения σ1 и σ2 должны удовлетворять условию:
где j1, j2 - углы поворота окна фильтра соответствующие положению окна фильтра для минимального значения СКО σ1 и минимального значения СКО σ2 соответственно; T1 - пороговое значение, которое устанавливается с учетом степени перекрытия выделяемых линейных объектов другими объектами изображения.
Согласно условию (5) значения σ1 и σ2 должны иметь низкие незначительно различающиеся значения, не превышать заданного порога T1, соответствующие им углы поворота должны различаться незначительно.
Вводится дополнительная пороговая проверка разности значения σ1 и среднего значения СКО для первой группы значений СКО и разности значения σ2 и среднего значения СКО для второй группы значений СКО:
где  - среднее значение СКО для положительного направления смещения координат точек при всех положениях окна фильтра;
- среднее значение СКО для положительного направления смещения координат точек при всех положениях окна фильтра;  - среднее значение СКО для отрицательного направления смещения координат точек при всех положениях окна фильтра; Т2 - пороговое значение, которое устанавливается для исключения точек объектов больших по площади, удовлетворяющих условию (5).
- среднее значение СКО для отрицательного направления смещения координат точек при всех положениях окна фильтра; Т2 - пороговое значение, которое устанавливается для исключения точек объектов больших по площади, удовлетворяющих условию (5).
Поскольку окно фильтра представляет собой прямолинейный отрезок, необходимо выполнить определение положения точек фильтра в узлах дискретной сетки. На фиг.2 представлен рисунок, поясняющий способ определения значения яркости точки в дискретном пространстве.
Для определения координат точек текущего положения окна фильтра используется формула, полученная объединением уравнения прямой (для текущего положения окна фильтра) и окружности, которую окно фильтра описывает при вращении относительно исследуемой точки изображения:
где h - порядковый номер точки окна фильтра начиная от исследуемой точки изображения с порядковым номером ноль; k - угловой коэффициент прямой.
В результате вычислений, координаты точек текущего положения окна фильтра могут принимать вещественные значения. Для определения яркости в точках окна фильтра необходимо осуществить переход к целочисленным координатам. Путем округления в большую и меньшую сторону до целых значений определяются четыре точки окружения для каждой точки (xh, yh) окна фильтра.
Для каждой найденной j-й точки окружения с координатами (xj, yj) находится расстояние:
далее, исходя из степени близости точкам окружения к точке с вещественными координатами, вычисляется значение весового коэффициента:

Яркость точки (xh,yh) определяются следующим образом:

В случае, когда угол поворота окна фильтра равен девяносто градусам, невозможно определить угловой коэффициент прямой k, так как тангенс угла девяносто градусов не определен. Но поскольку расположение окна фильтра в этом случае является вертикальным, координаты точек и значения яркости в них определяются без дополнительных вычислений.
Итоговая яркость точки определяется согласно яркости точек окружения, с учетом их весовых коэффициентов.
Функция отклика КИХ-фильтра в исследуемой точке дает положительный отклик, если для этой точки выполняются одновременно условие (5) и условие (6). Для точек с положительным откликом функции отклика КИХ-фильтра строятся карта найденных минимальных значений СКО и карта соответствующих этим значениям углов поворота. На основе полученных данных, после дополнительной обработки, основанной на объединении найденных точек с положительным откликом КИХ-фильтра и подавлении шумов, строятся искомые протяженные линейные объекты.
Карта найденных минимальных значений СКО описывается формулой:

где Q - значения среднеквадратических отклонений, в точках с ненулевым откликом функции КИХ-фильтра; FQ(.) - функция отклика КИХ-фильтра; f(x, y) - значение яркости точки с координатами (х, y).
Таким образом, карта СКО представляет собой карту исходного изображения, на которой отмечаются вычисленные минимальные СКО для точек изображения, определенных как принадлежащие протяженным линейным объектам, в соответствии с координатами этих точек.
Карта углов поворота окна фильтра описывается формулой:

где ψ - карта значений углов поворота; Fψ(.) - функция угла поворота окна фильтра.
Таким образом, карта углов поворота представляет собой карту исходного изображения, на которой отмечаются значения углов поворота окна фильтра, соответствующие положениям окна фильтра с минимальными СКО, для точек изображения, определенных как принадлежащие протяженным линейным объектам, в соответствии с координатами этих точек.
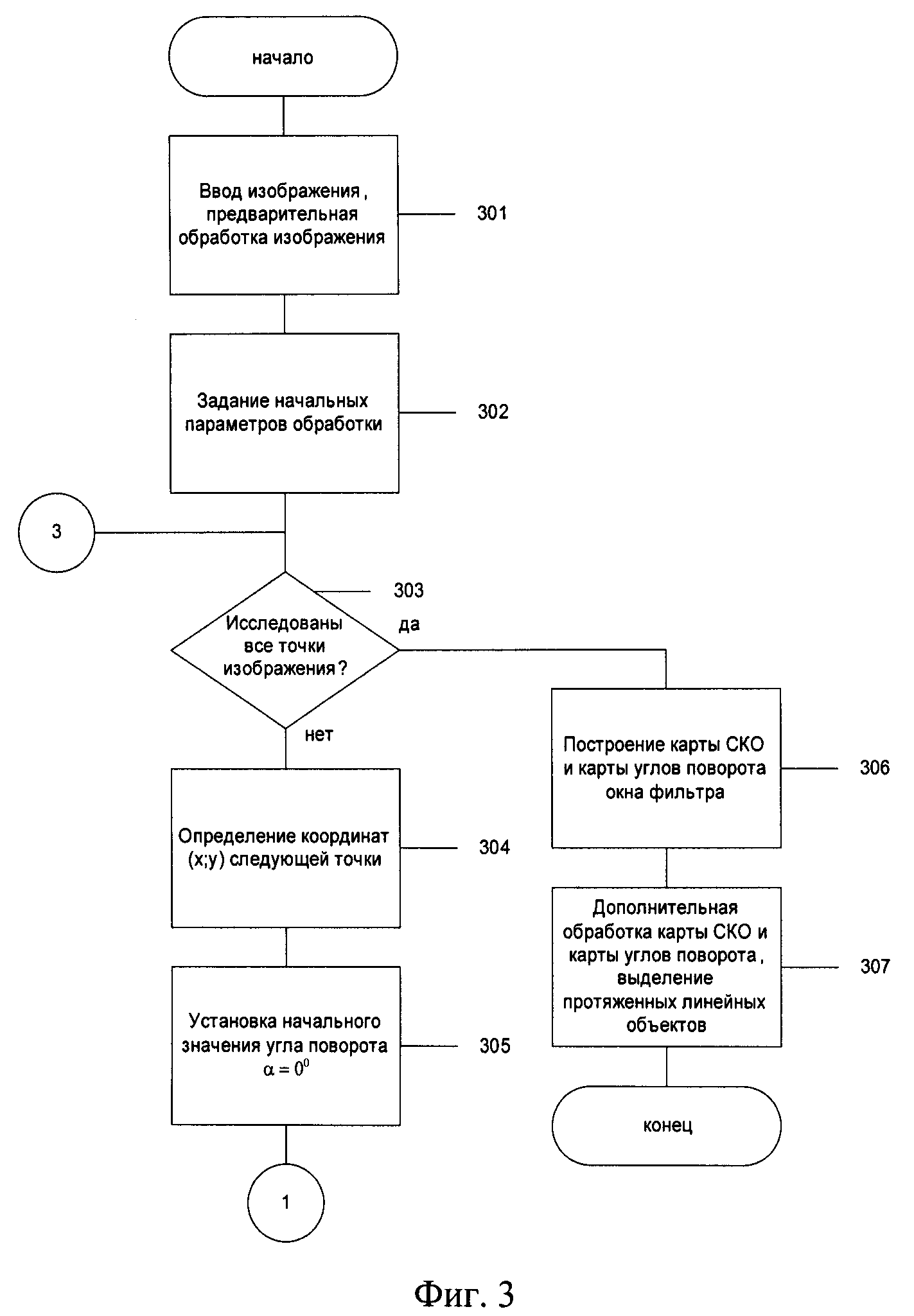
Алгоритм выделения протяженных линейных объектов на аэрокосмических изображениях представлен в виде блок-схемы на фиг.3 и фиг.4.
В блоке 301 (фиг.3) происходит ввод изображения и его предварительная обработка.
Под изображением понимают матрицу значений яркостей пикселей цифрового изображения. В качестве исходных изображений могут использоваться визуальные изображения обработанных данных дистанционного зондирования Земли, представленные в цифровом формате. Дальнейшей обработкой изображения управляет контроллер.
Предварительная обработка изображения выполняется автоматически. В качестве предварительной обработки изображения используется наложение медианного фильтра, что позволяет выполнить подавление шума с сохранением перепадов яркости (контуров), не искажая ступенчатые и пилообразные функции изображения. Далее осуществляется переход к блоку 302 (фиг.3).
В блоке 302 (фиг.3) происходит ввод начальных параметров обработки изображения. Исходя из параметров изображения и его яркостных характеристик, пользователем устанавливаются следующие начальные параметры: значение длины окна фильтра L, количество углов поворота Nφ, пороговое значение Т1, пороговое значение Т2.
Длина окна фильтра L устанавливается согласно масштабу изображения аэрокосмического снимка. Чем больше масштаб изображения, тем больше должно быть значение L.
Значение количества углов поворота Nφ влияет на объемы временных затрат, необходимые для работы алгоритма, и зашумленность карты углов поворота окна фильтра. Чем больше значение Nφ, тем больше времени требуется для работы алгоритма и выше зашумленность карты углов поворота окна фильтра, однако слишком низкое значение Nφ может привести к потере полезной информации.
Пороговое значение Т1 ограничивает минимально допустимое значение СКО, удовлетворяющее условиям поиска и устанавливается с учетом степени перекрытия выделяемых линейных объектов другими объектами изображения для уменьшения ошибок при поиске точек.
Пороговое значение Т2 разности минимального СКО и среднего значения СКО для всех возможных положений окна фильтра какого-либо направления смещения устанавливается для исключения точек площадных объектов (поля, озера, дома и др.), не относящихся к искомым протяженным линейным объектам, но удовлетворяющих указанным условиям проверки (5).
На значение параметров T1 и Т2 также влияет значение общего уровня яркости и контрастности изображения. Далее осуществляется переход к блоку 303 (фиг.3).
В блоке 303 (фиг.3) происходит проверка завершения обработки изображения. Если обработка не завершена, выбирается следующая исследуемая точка изображения в блоке 304 (фиг.3). Если обработка завершена, на основе полученных данных происходит построение карты СКО и карты углов поворота окна фильтра в блоке 306 (фиг.3).
В блоке 304 (фиг.3) определяются координаты следующей исследуемой точки изображения. Далее осуществляется переход к блоку 305 (фиг.3).
В блоке 305 (фиг.3) начальное значение угла поворота окна фильтра устанавливается равным нулю градусов. Далее осуществляется переход к блоку 401 (фиг.4).
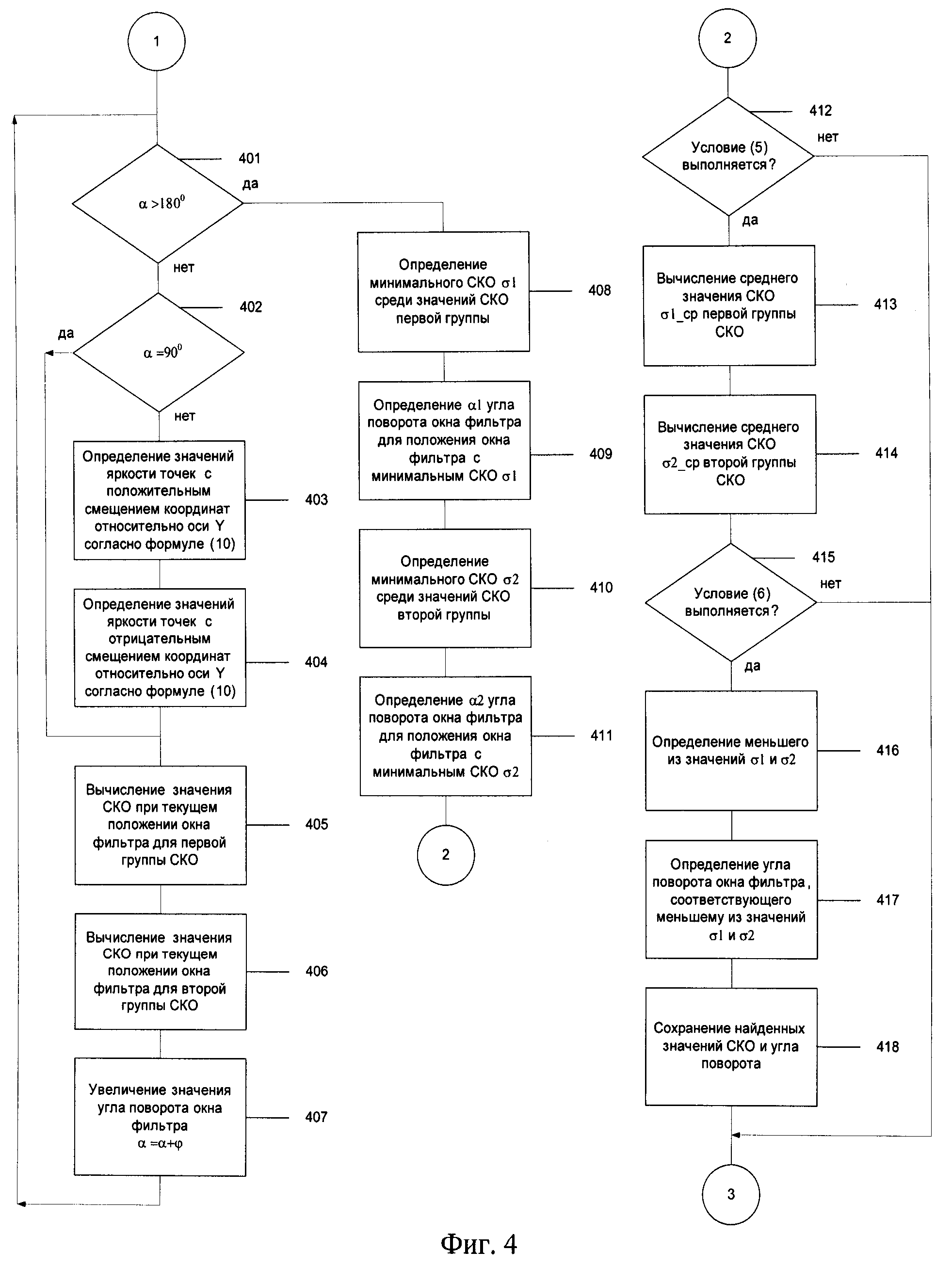
В блоке 401 (фиг.4) проверяется значение угла α поворота окна фильтра, которое должно находиться в диапазоне [0°; 180°). Если значение угла α не превышает допустимые указанным диапазоном значения, происходит дальнейшая проверка значения угла α в блоке 402 (фиг.4). Если значение угла α превышает допустимые указанным диапазоном значения, происходит переход к блоку 408 (фиг.4) определения минимального СКО σ1 среди значений СКО первой группы.
В блоке 402 (фиг.4) проверяется, равен ли угол α поворота окна фильтра девяносто градусов. Если угол α не равен девяносто градусов, происходит переход к блоку 403 (фиг.4), где по формуле (10) в дискретном пространстве определяются значения яркости точек с положительным смещением координат относительно оси Y. Если угол α равен девяносто градусов, использование формулы (10) для вычисления яркости точек становится невозможным, так как нельзя вычислить значение углового коэффициента k, поскольку тангенс угла девяносто градусов не определен. Однако расположение окна фильтра в этом случае является вертикальным, координаты точек и значения яркости в них определяются согласно изображению. В этом случае осуществляется переход к блоку 405 (фиг.4) вычисления значения СКО при текущем положении окна фильтра для первой группы СКО.
В блоке 403 (фиг.4) для всех точек с положительным смещением координат относительно оси Y при текущем положении окна фильтра вычисляются значения яркости в дискретном пространстве согласно формуле (10). Все найденные значения яркости точек сохраняются. Далее осуществляется переход к блоку 404 (фиг.4).
В блоке 404 (фиг.4) для всех точек с отрицательным смещением координат относительно оси Y при текущем положении окна фильтра вычисляются значения яркости в дискретном пространстве согласно формуле (10). Все найденные значения яркости точек сохраняются. Далее осуществляется переход к блоку 405 (фиг.4).
В блоке 405 (фиг.4) происходит вычисление значения СКО при текущем положении окна фильтра для первой группы СКО. СКО вычисляется по формуле (4). Причем, если для текущего положения окна фильтра угол α равен девяносто градусов, для вычисления СКО используются значения яркости точек изображения, с положительным смещением координат относительно оси Y, соответствующие положению окна фильтра. Если угол α не равен девяносто градусов, для вычисления СКО используются значения яркости точек, вычисленных в блоке 403 (фиг.4). Найденное значение СКО сохраняется в первой группе СКО. Для найденного значения СКО сохраняется соответствующее значение угла поворота α текущего положения окна фильтра. Далее осуществляется переход к блоку 406 (фиг.4).
В блоке 406 (фиг.4) происходит вычисление значения СКО при текущем положении окна фильтра для второй группы СКО. СКО вычисляется по формуле (4). Причем, если для текущего положения окна фильтра угол α равен девяносто градусов, для вычисления СКО используются значения яркости точек изображения, с отрицательным смещением координат относительно оси Y, соответствующие положению окна фильтра. Если угол α не равен девяносто градусов, для вычисления СКО используются значения яркости точек, вычисленных в блоке 404 (фиг.4). Найденное значение СКО сохраняется во второй группе СКО. Для найденного значения СКО сохраняется соответствующее значение угла поворота α текущего положения окна фильтра. Далее осуществляется переход к блоку 407 (фиг.4).
В блоке 407 (фиг.4) происходит увеличение значения угла поворота α окна фильтра на шаг угла поворота φ. Шаг угла поворота φ вычисляется по формуле (1). Далее происходит переход к блоку 401 (фиг.4), где проверяется новое значение угла поворота α окна фильтра.
В блоке 408 (фиг.4) определяется минимальное СКО σ1 среди значений СКО первой группы. Найденное значение σ1 сохраняется. Далее осуществляется переход к блоку 409 (фиг.4).
В блоке 409 (фиг.4) происходит определение угла поворота σ1 окна фильтра соответствующего найденному в блоке 408 (фиг.4) минимальному значению СКО σ1 среди значений СКО первой группы. Значение α1 сохраняется. Далее осуществляется переход к блоку 410 (фиг.4).
В блоке 410 (фиг.4) определяется минимальное СКО σ2 среди значений СКО второй группы. Найденное значение σ2 сохраняется. Далее осуществляется переход к блоку 411 (фиг.4).
В блоке 411 (фиг.4) происходит определение угла поворота α2 окна фильтра соответствующего найденному в блоке 410 (фиг.4) минимальному значению СКО σ2 среди значений СКО второй группы. Значение α2 сохраняется. Далее осуществляется переход к блоку 412 (фиг.4).
В блоке 412 (фиг.4) осуществляется проверка выполнения условия (5) для найденных в блоке 408 (фиг.4) значения σ1, в блоке 410 (фиг.4) значения σ2 и соответствующих им значений угла α1 определенного в блоке 409 (фиг.4) и угла α2, определенного в блоке 411 (фиг.4). Если условие (5) выполняется, происходит переход к блоку 413 (фиг.4), в котором вычисляется среднее значение СКО σ1_cp для первой группы СКО. Если условие (5) не выполняется, считается, что исследуемая точка не принадлежит протяженным линейным объектам, происходит переход к блоку 303 (фиг.3), в котором осуществляется проверка завершения обработки изображения.
В блоке 413 (фиг.4) вычисляется среднее значение СКО σ1_ср для первой группы СКО. Далее осуществляется переход к блоку 414 (фиг.4).
В блоке 414 (фиг.4) вычисляется среднее значение СКО σ2_ср для второй группы СКО. Далее осуществляется переход к блоку 415 (фиг.4).
В блоке 415 (фиг.4) осуществляется проверка выполнения условия (6) для вычисленного в блоке 413 (фиг.4) значения σ1_ср, вычисленного в блоке в блоке 414 (фиг.4) значения σ2_ср, вычисленного в блоке 408 (фиг.4) значения σ1, вычисленного в блоке 410 (фиг.4) значения σ2. Если условие (6) выполняется, происходит переход к блоку 416 (фиг.4), в котором определяется меньшее из значений σ1 и σ2. Если условие (6) не выполняется, считается, что исследуемая точка не принадлежит протяженным линейным объектам, происходит переход к блоку 303 (фиг.3), в котором осуществляется проверка завершения обработки изображения.
В блоке 416 (фиг.4) определяется меньшее из значений σ1 и σ2. Далее осуществляется переход к блоку 417 (фиг.4).
В блоке 417 (фиг.4) определяется угол поворота окна фильтра соответствующий меньшему из значений σ1 и σ2. Далее осуществляется переход к блоку 418 (фиг.4).
В блоке 418 (фиг.4) для исследуемой точки, в соответствии с координатами этой точки на изображении, происходит сохранение найденного в блоке 416 (фиг.4) значения СКО и найденного в блоке 417 (фиг.4) значения угла поворота для карты СКО и карты углов поворота соответственно. Исследуемая точка считается принадлежащей протяженному линейному объекту, ее координаты сохраняются. Далее происходит переход к блоку 303 (фиг.3), в котором осуществляется проверка завершения обработки изображения.
В блоке 306 (фиг.3) осуществляется построение карты СКО и карты углов поворота окна фильтра. После обработки всего изображения, на основе всех сохраненных в блоке 418 (фиг.4) данных, строится карта СКО, формула (11) и карта углов поворота окна фильтра, формула (12). Таким образом, на этих картах сохраняется информация о минимальном значении СКО и положении окна фильтра, при котором это СКО было найдено для точек, которые, согласно алгоритму, считаются принадлежащими протяженным линейным объектам. Далее осуществляется переход к блоку 307 (фиг.3).
В блоке 307 (фиг.3) происходит дополнительная обработка карты СКО и карты углов поворота окна фильтра, а также выделение протяженных линейных объектов на изображении. Дополнительная обработка карты СКО и карты углов поворота окна фильтра осуществляется путем объединения найденных точек протяженных линейных объектов с учетом значения минимального СКО карты СКО и соответствующего ему положению окна фильтра карты углов поворота окна фильтра каждой точки. На основе результатов дополнительной обработки карты СКО и карты углов поворота строится схема выделенных протяженных линейных объектов изображения. Согласно этой схеме происходит выделение протяженных линейных объектов на исходном изображении.
Данное изобретение позволяет повысить точность выделения протяженных линейных объектов на аэрокосмических изображениях за счет разработанного способа основанного на применении КИХ-фильтра, позволяющего определить точки, принадлежащие протяженным линейным объектам изображения по положительному результату работы функции отклика КИХ-фильтра, основанной на анализе СКО яркости точек окна фильтра при повороте окна фильтра относительно каждой точки изображения.
Способ выделения протяженных линейных объектов на аэрокосмических изображениях, включающий получение изображения в цифровой форме, предварительную обработку изображения и выделение протяженных линейных объектов, отличается тем, что содержит обработку изображения с использованием КИХ-фильтра, позволяющего определить точки, принадлежащие протяженным линейным объектам изображения по положительному отклику КИХ-фильтра, основанному на анализе значений среднего квадратического отклонения яркости точек окна фильтра при повороте окна фильтра относительно каждой исследуемой точки изображения.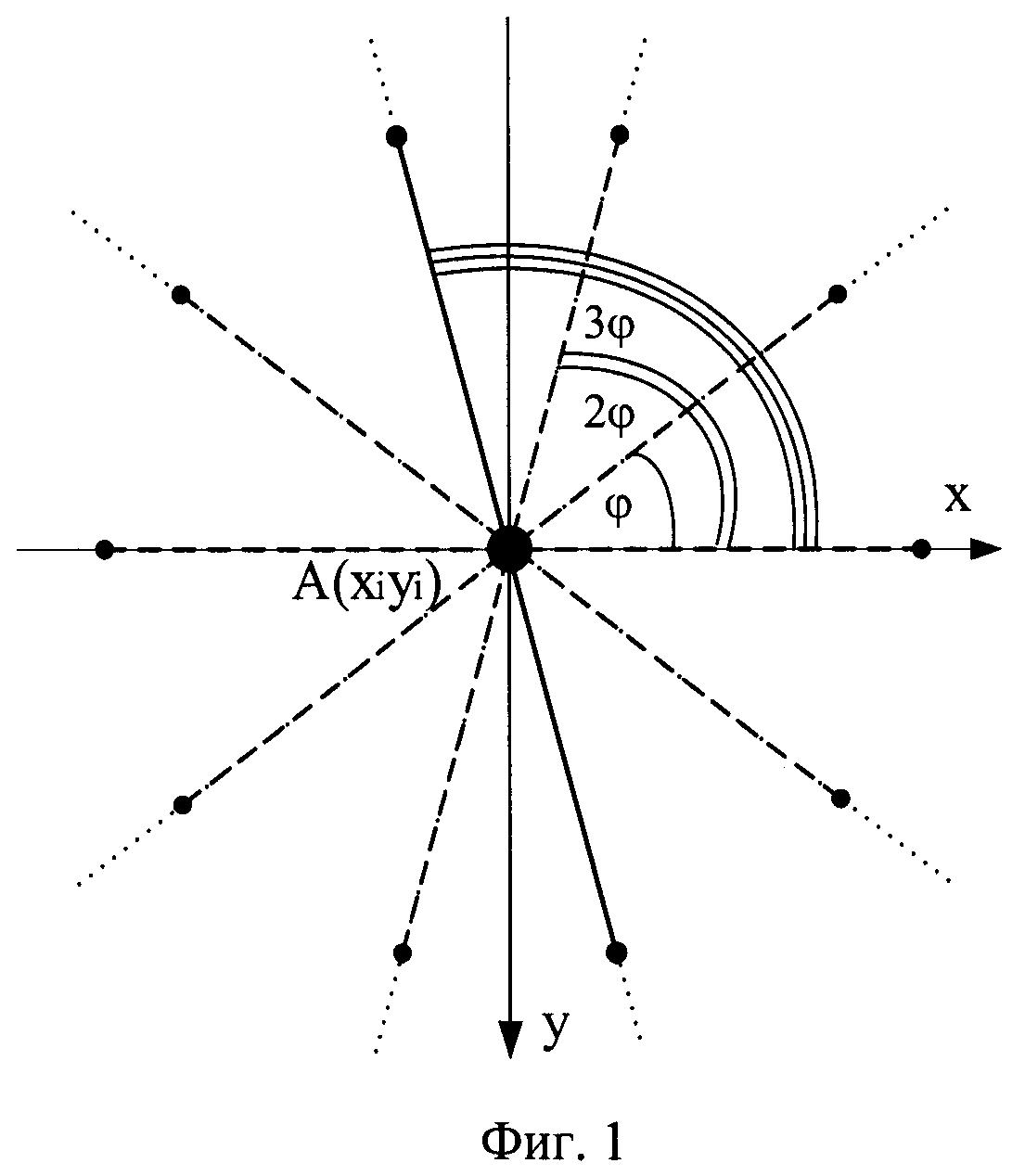
Способ формирования профиля головки рельсов
Мостовой измеритель параметров двухполюсников
Мостовой измеритель параметров двухполюсников
Устройство стабилизации режима резания при токарной оработке деталей на оборудовании с чпу
Способ сорбционной очистки сточных вод от красителей
Устройство для измерения параметров движения пишущего узла
Мостовой измеритель параметров двухполюсников
Мостовой измеритель параметров двухполюсников
Цифровой многокомпонентный датчик перемещений
Способ получения основного хлорида или нитрата меди (ii)

