Результат интеллектуальной деятельности: МОДУЛЬНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) И БАЙОНЕТНОЕ СОЕДИНЕНИЕ ДЛЯ СТЫКОВКИ МОДУЛЕЙ
Вид РИД
Изобретение
Изобретение относится к области летательных аппаратов, в частности, касается аэродинамической компоновки беспилотных летательных аппаратов (БЛА).
Известен модульный беспилотный летательный аппарат (патент на изобретение РФ №2422327, МПК B64C 3/38, от 05.02.10), содержащий корпус вытянутой формы с несущей балкой, расположенной вдоль корпуса. На несущей балке размещены узлы подвески, при этом задний узел подвески совмещен с поворотным узлом крыла летательного аппарата. Полуразмах крыла меньше или равен расстоянию между узлами подвески.
Модульный БЛА имеет следующие недостатки: центральная балка, расположенная вдоль всего корпуса, усложняет процесс сборки летательного аппарата, уменьшает полезный объем, при этом балка должна быть изготовлена с высокой степенью точности для обеспечения минимальных зазоров между модулями, а также балка должна отличаться высокой надежностью. Изготовленный таким образом БЛА имеет большую массу и, следовательно, имеет низкую дальность полета.
Известен также многовариантный беспилотный летательный аппарат (патент на изобретение РФ №2323850, МПК B64C 7/00, от 15.06.05), включающий фюзеляж, крыло с центропланом, хвостовое оперение, силовую установку с топливным баком и бортовые системы. Фюзеляж и крыло выполнены в виде набора отдельных заменяемых модулей аналогичного функционального назначения. Корпус каждого модуля выполнен в виде набора силовых элементов и обшивки. Каждый модуль имеет одинаковые стыковочные узлы.
Недостатком данного изобретения является низкая защищенность модулей БЛА и оборудования при жесткой посадке.
Наиболее близким по технической сущности и достигаемому результату к заявленному изобретению является модульный беспилотный летательный аппарат (патент на изобретение US №7922115, МПК B64C 3/38 от 23.04.2007), включающий фюзеляж, состоящий из носового, хвостового и центрального модулей, крыла, расположенного в центральном модуле, каждая консоль которого состоит из двух модулей - внешнего и внутреннего, взаимозаменяемых между собой, органов управления - элеронов, расположенных на двух консолях крыла, хвостового оперения, расположенного в хвостовом модуле фюзеляжа, состоящего из руля высоты, рулей направления, вертикального и горизонтальных стабилизаторов, передней и задней стоек шасси, энергетическую установку и воздушный винт тянущего типа, располагающиеся в носовом модуле фюзеляжа.
Недостатком данного изобретения является увеличение лобового сопротивления БЛА из-за большого количества аэродинамических поверхностей, незащищенность воздушного винта при жесткой посадке, который может повредить другие элементы БЛА, ограничение функциональных возможностей вследствие сложности применения различной диагностической аппаратуры на одном и том же БЛА.
Наиболее бликим по технической сущности и достигаемому результату для байонетного соединения для стыковки модулей является байонетное соединение (патент на изобретение RU №2370677, МПК F16B 21/04 от 10.12.2008), содержащее обхватываемую деталь с герметично установленными пальцами и обхватывающую деталь с пазами, выполненными в виде крючка, причем обхватываемая деталь выполнена с выемкой, имеющей скос в сторону пальцев, уплотнительное кольцо, пружину, установленные в выемке обхватывающей детали, выполненной с фиксирующим выступом.
Недостатком данного изобретения для модульного БЛА является сложность разборки модулей БЛА и высокие усилия, действующие на обшивку модулей БЛА, которые могут привести к потере устойчивости обшивки.
Задачей настоящего изобретения является повышение надежности беспилотного летательного аппарата в процессе эксплуатации, расширение его функциональных возможностей.
Техническим результатом является снижение лобового сопротивления, обеспечение быстросъемности модулей за счет использования соединений байонетного типа, защищенности модулей и оборудования при жесткой посадке.
Поставленная задача решается, а технический результат достигается по первому варианту за счет того, беспилотный летательный аппарат содержит фюзеляж, состоящий из носового, хвостового и центрального модулей, крыло, расположенное в центральном модуле фюзеляжа, состоящее из левой и правой консолей, органы управления - элероны, расположенные на двух консолях крыла, переднюю и задние стойки шасси, энергетическую установку и воздушный винт, согласно изобретению энергетическая установка и воздушный винт, выполненный толкающего типа, расположены в хвостовом модуле фюзеляжа, на концах обеих консолей крыла расположены винглеты, при этом носовой, хвостовой и центральный модули фюзеляжа соединены между собой замками байонетного типа, причем консоли крыла соединены с центральным модулем фюзеляжа с помощью стыковочного узла, а передняя стойка шасси расположена в носовом модуле, вблизи диагностической аппаратуры.
Таким образом, можно заключить, что беспилотный летательный аппарат выполнен по схеме «бесхвостка»
Поставленная задача решается, а технический результат достигается по второму варианту за счет того, беспилотный летательный аппарат содержит фюзеляж, состоящий из носового, хвостового и центрального модулей, крыло, расположенное в центральном модуле фюзеляжа, состоящее из левой и правой консолей, органы управления - элероны, расположенные на двух консолях крыла, хвостовое оперение, расположенное в хвостовом модуле фюзеляжа, состоящее из руля высоты, рулей направления, вертикального и горизонтальных стабилизаторов, переднюю и задние стойки шасси, энергетическую установку и воздушный винт, согласно изобретению энергетическая установка и воздушный винт, выполненный толкающего типа, расположены в хвостовом модуле фюзеляжа, хвостовое оперение крепится к консолям крыла с помощью двух балок, при этом носовой, хвостовой и центральный модули фюзеляжа соединены между собой замками байонетного типа, причем консоли крыла соединены с центральным модулем фюзеляжа с помощью стыковочного узла, а передняя стойка шасси расположена в носовом модуле вблизи диагностической аппаратуры.
Кроме того, согласно изобретению на концах обеих консолей крыла расположены винглеты.
Таким образом, можно заключить, что беспилотный летательный аппарат выполнен по двухбалочной схеме.
Поставленная задача решается, а технический результат достигается также за счет использования байонетного соединения для стыковки модулей фюзеляжа между собой, содержащего обхватываемую деталь с герметично установленными пальцами и обхватывающую деталь с пазами, выполненными в виде крючка, уплотнительное кольцо, пружину, согласно изобретению обхватывающая и обхватываемая детали соединены в одной плоскости по окружности, а уплотнительное кольцо и пружина, выполненная тарельчатого типа, расположены между обхватывающей и обхватываемой деталями, причем обхватывающая и обхватываемая деталь дополнительно скреплены элементами разъемных соединений, например болтами, расположенными на одной окружности.
Существо изобретения поясняется следующими чертежами:
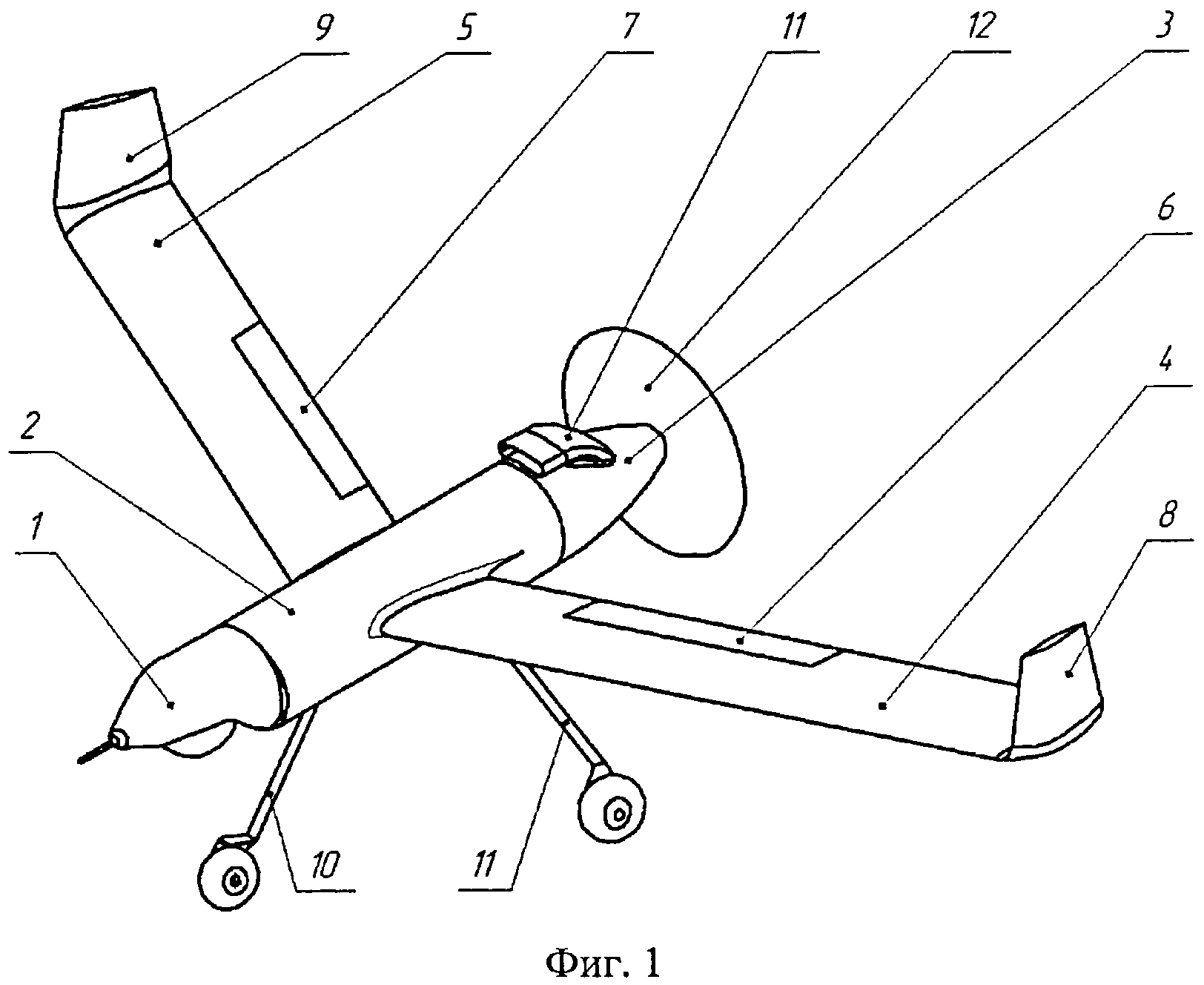
Фиг.1 - беспилотной летательный аппарат (1 вариант), выполненный по схеме «бесхвостка».
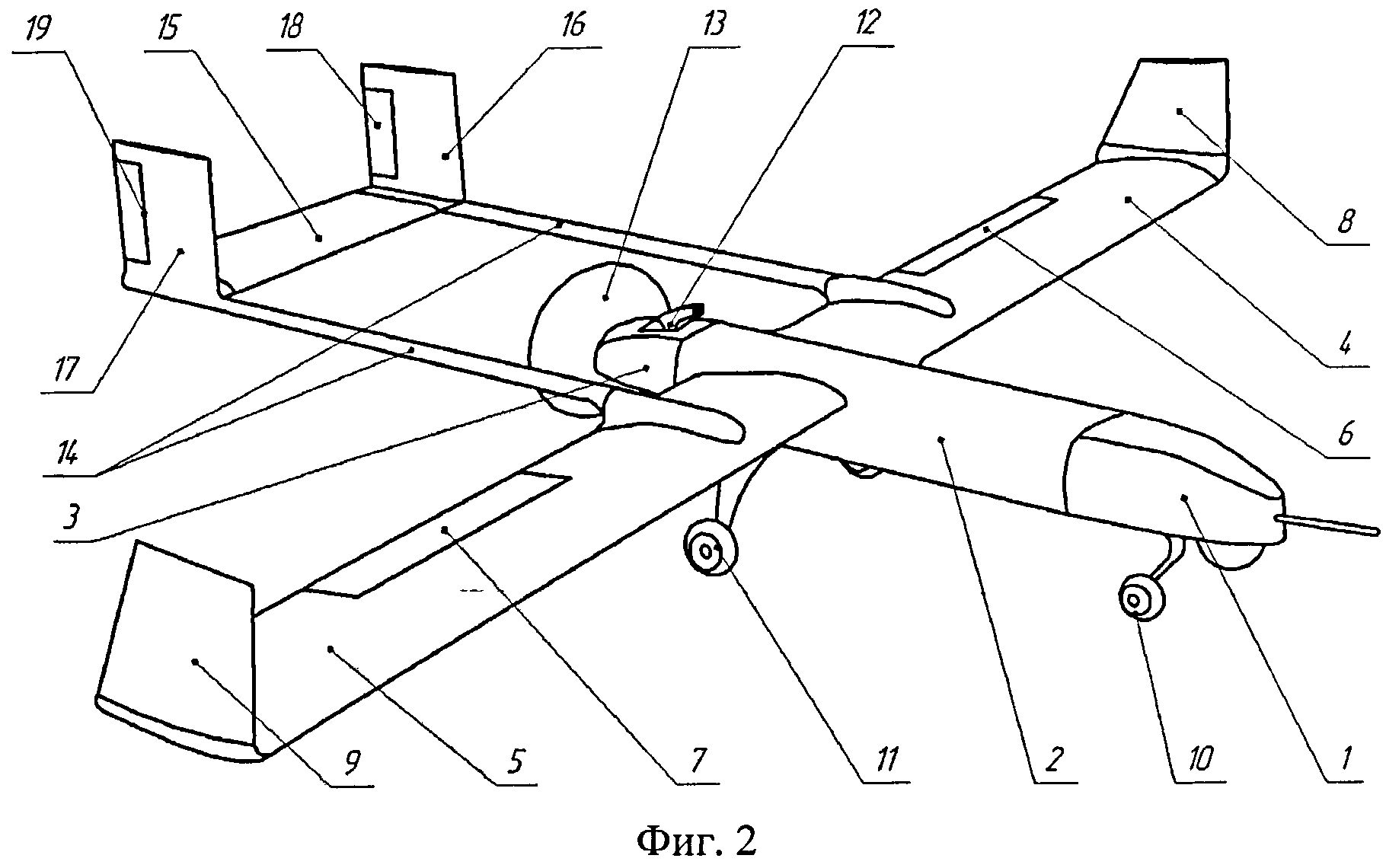
Фиг.2 - беспилотный летательный аппарат (2 вариант), выполненный по двухбалочной схеме.
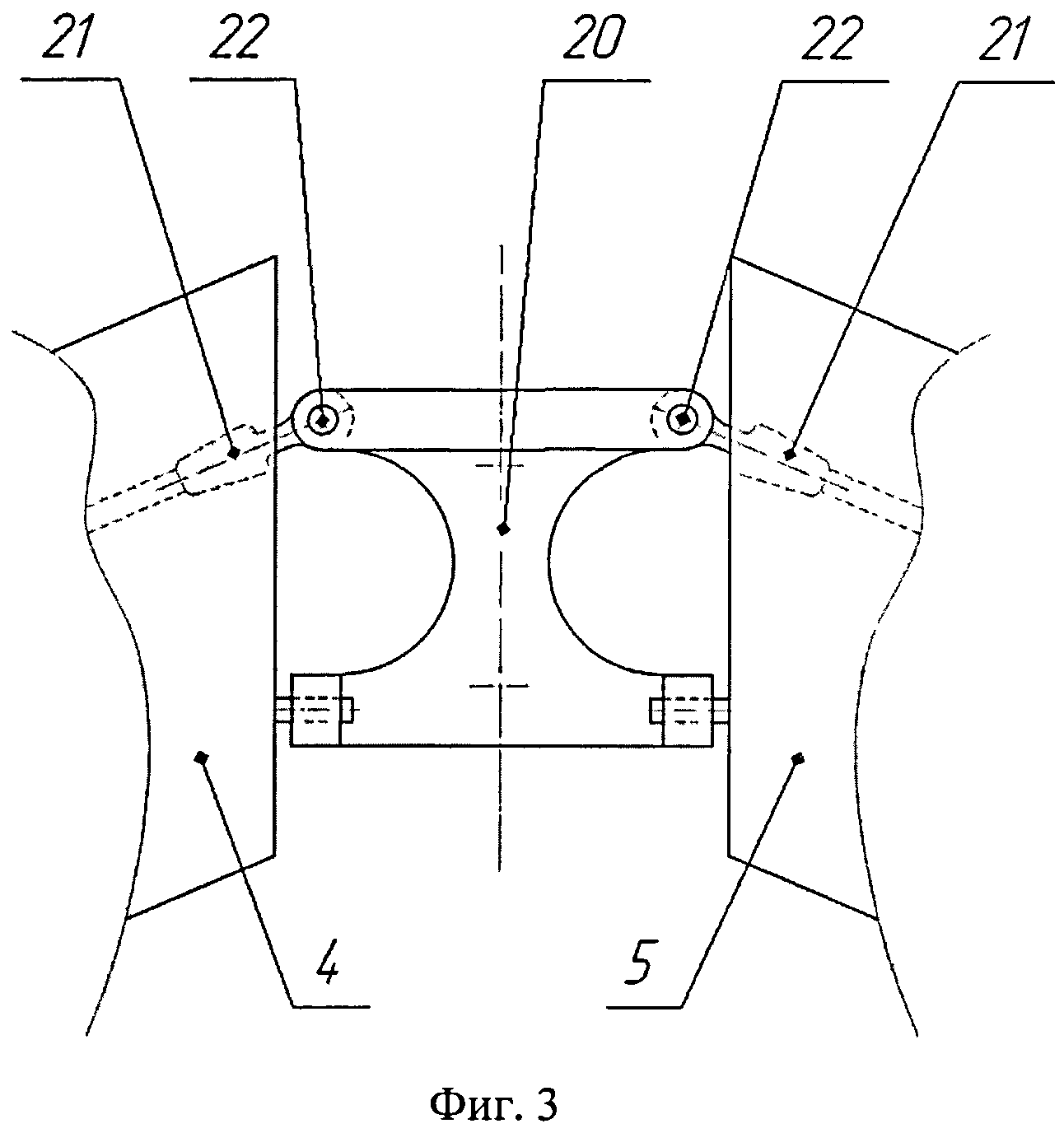
Фиг.3 - стыковочный узел.
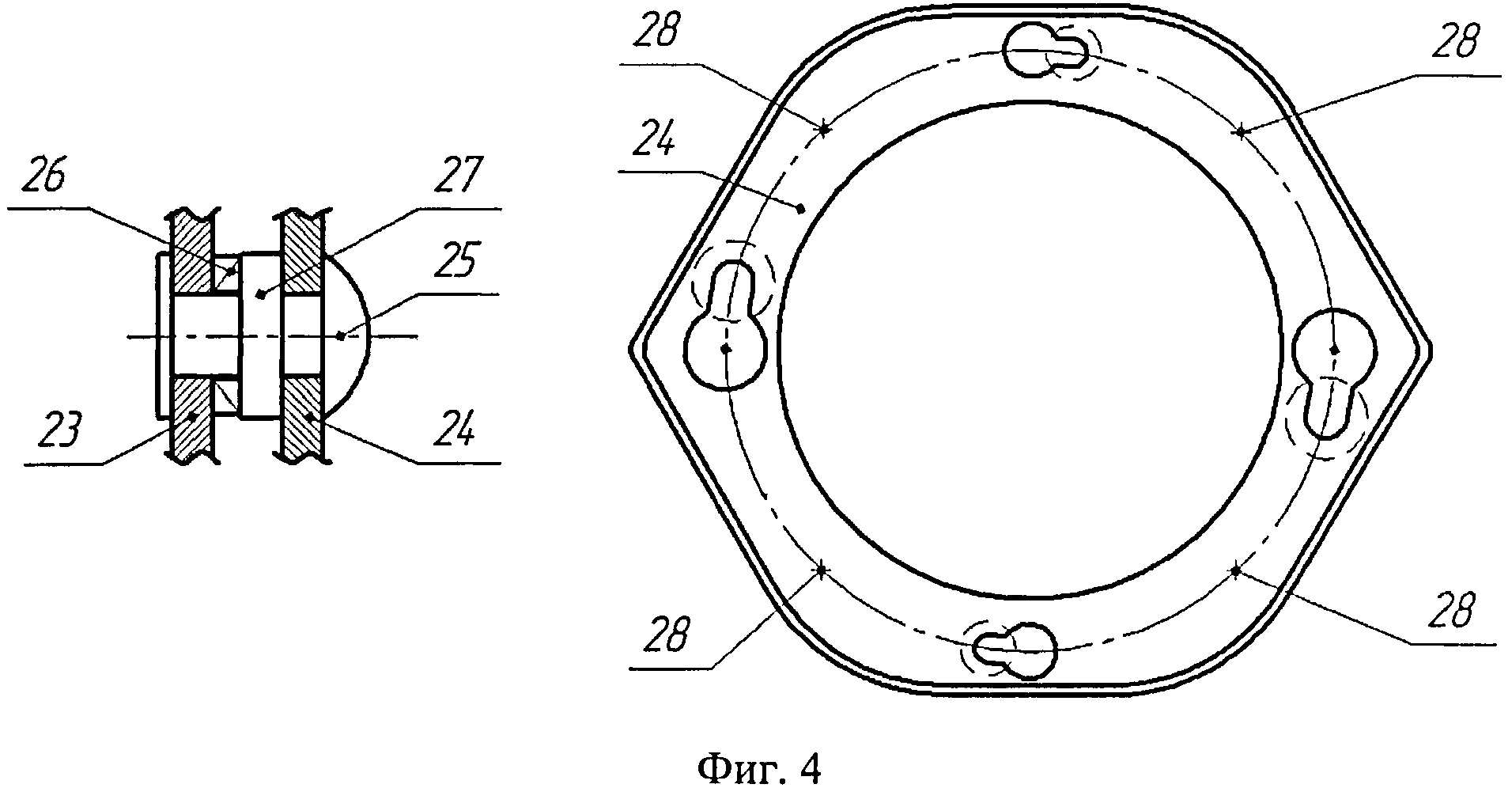
Фиг.4 - байонетное соединение.
Беспилотный летательный аппарат по первому варианту содержит фюзеляж, состоящий из носового модуля 1, где установлена сменная диагностическая аппаратура, центрального модуля 2, хвостового модуля 3, крыло, состоящее из левой 4 и правой 5 консолей, левый 6 и правый 7 элероны, расположенные на консолях крыла 4 и 5, левый 8 и правый 9 винглеты, расположенные на концах обеих консолей крыла 4 и 5, переднюю стойку шасси 10, расположенную в носовом модуле 1, задние стойки шасси 11, расположенные в центральном модуле 2, энергетическую установку 12 и воздушный винт толкающего типа 13, расположенные в хвостовом модуле 3 (фиг.1, фиг.2).
Беспилотный летательный аппарат по второму варианту отличается наличием балок 14 для крепления хвостового оперения к консолям крыла 4 и 5, хвостового оперения, состоящего из горизонтального стабилизатора 15, левого 16 и правого 17 вертикальных стабилизаторов, левого 18 и правого 19 рулей направления (фиг.2).
В обоих вариантах консоли крыла 4 и 5 соединены с центральным модулем фюзеляжа 2 с помощью стыковочного узла 20, в котором расположены стыковочные элементы 21 и пиропатроны 22 (фиг.3).
В обоих вариантах модули фюзеляжа 1-3 соединены между собой с помощью байонетного соединения, содержащего шпангоуты, один из которых является обхватываемой деталью 23, а другой обхватывающей деталью 24, причем на обхватываемой детали 23 герметично установлены пальцы 25, пружину тарельчатого типа 26 и уплотнительное кольцо 27, расположенные последовательно между обхватываемой 23 и обхватывающей 24 деталями, которые скреплены элементами разъемных соединений, например болтами 28, расположенными на одной окружности (фиг.4).
БЛА работает следующим образом: воздушный винт 13, расположенный в модуле 3, приводится во вращение энергетической установкой 12 (в качестве которой может выступать двигатель внутреннего сгорания или электродвигатель) и создает полезную тягу, которая придает ускорение БЛА.
На консолях крыла 4 и 5 создается большая часть подъемной силы и, при определенной скорости, когда подъемная сила превышает вес БЛА, начинается набор высоты. Управление БЛА по тангажу по первому варианту осуществляется элеронами 6 и 7, изменение направления полета осуществляется за счет поворота винглетов 8 и 9.
Управление БЛА по тангажу по второму варианту осуществляется элеронами 6 и 7 и рулем высоты 15, изменение направления полета осуществляется за счет поворотов рулей направления 18 и 19.
В случае жесткой посадки БЛА происходит отстреливание консолей крыла 4 и 5 по стыковочным элементам 21 с помощью пиропатронов 22, установленных в стыковочном узле 20, в результате чего гасится часть кинетической энергия фюзеляжа, а оставшаяся кинетическая энергия рассеивается в обшивке фюзеляжа. Таким образом, достигается сохранность оборудования, располагающегося внутри фюзеляжа. Передняя стойка шасси 10 располагается рядом с модулем целевой нагрузки 1 фюзеляжа и, в случае жесткой посадки фюзеляжа на носовую часть, передняя стойка шасси 10 защитит целевую нагрузку (диагностическую аппаратуру) от повреждений.
Модули фюзеляжа 1-3 стыкуются между собой с помощью быстросъемных соединений байонетного типа, а консоли крыла 4-5 стыкуются с центральным модулем 2 фюзеляжа по стыковочным элементам 21 с помощью стыковочного узла 20. Применение байонетного соединения для модулей фюзеляжа возможно за счет того, что все нагрузки по фюзеляжу передаются через силовые элементы на обшивку.
Байонетное соединение работает следующим образом: при сборке обхватываемую деталь 23, принадлежащую, например, носовому модулю фюзеляжа 1, вставляют в пазы обхватывающей детали 24, принадлежащей центральному модулю 2, до упора, при этом тарельчатая пружина 26 сжимается, а кольцо 27 уплотняет соединение, после чего центральный 2 и носовой 1 модули фюзеляжа поворачивают друг относительно друга, например, по часовой стрелке, при этом пальцы 25 заходят в пазы обхватывающей детали 24. Во время работы байонетного соединения обхватываемая 23 и обхватывающая 24 детали работают на сжатие, изгиб и растяжение, но при этом не происходит потери устойчивости обшивки моделей фюзеляжа 1-3, пальцы 25 работают на растяжение. Для предотвращения развинчивания модулей фюзеляжа 1-3 друг относительно друга осевые размеры тарельчатой пружины 26 и уплотнительного кольца 27 подобраны таким образом, что при работе байонетного соединения на рабочих поверхностях обхватываемой 23 и обхватывающей 24 детали создаются силы трения, предотвращающие развинчивание. Для предотвращения развинчивания модулей фюзеляжа 1-3 друг относительно друга также предусмотрены разъемные соединения, например болты 28, расположенные на одной окружности, соединяющие обхватываемую 23 и обхватывающую 24 детали байонетного соединения.
Такая модульная конструкция обеспечит высокую надежность БЛА в процессе эксплуатации, расширит его функциональные возможности за счет различной сменной диагностической аппаратуры, располагающейся в носовом модуле 1, позволит производить сборку БЛА с использованием минимального набора инструментов.
Итак, заявляемое изобретение позволяет повысить надежность БЛА в процессе эксплуатации, расширить его функциональное возможности, а также обеспечивает снижение лобового сопротивления, быстросъемность модулей за счет использования соединений байонетного типа, защищенность модулей и оборудования при жесткой посадке.
Способ автоматической посадки беспилотного летательного аппарата для мониторинга протяженных объектов
Многоходовой переключатель потока жидкой среды
Затвор концевой байонетный
Способ автоматической посадки беспилотного летательного аппарата для мониторинга протяженных объектов
Многоходовой переключатель потока жидкой среды
Затвор концевой байонетный
Устройство для сепарации жидкостных пробок
Способ заправки и разгрузки баллонов для хранения компримированного природного газа
Передвижной комплекс технологического оборудования на понтонном основании

