Результат интеллектуальной деятельности: СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ИНЖЕНЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области геодезических измерений, в частности к высокоточным измерениям на строящихся и находящихся в эксплуатации инженерных объектах, нуждающихся в постоянном геодезическом мониторинге для своевременного определения критических деформаций, возникающих в результате атмосферных явлений, осадок грунтов, внутреннего сопротивления материалов конструкций и др.
Известен способ сканирования лазерным излучением по синусоидальному закону в пределах диапазона измерений по двум координатам одновременно, заключающийся в том, что при сдвиге фаз синусоидальных колебаний на π/2 результирующее сканирование образует круговое сканирование, при этом в качестве анализатора используют щелевую диафрагму или фотодиоды, размеры которых соответствуют размерам щелевой диафрагмы, определяют диапазон измерений, измеряют временной интервал между двумя сигналами, поступающими с анализатора относительно опорного положения [Якушенков Ю.Г. Теория и расчет оптико-электронных приборов, М., «Машиностроение», 1989. 360 с].
Известно лазерное устройство для измерения нестабильности пространственного положения объектов и определения отклонения их форм от прямолинейности, содержащее лазер, оптическое устройство, формирующее референтное направление, частично-отражающее поверхности и блок обработки информации [Патент РФ RU 2366894 С2, G01C 1/00; G01B 11/00 от 14.11.2007 г.].
Недостатками указанных способа и устройства являются необходимость иметь более широкую, чем для амплитудных и фазовых устройств полосу пропускания электронного тракта, ограничение, продиктованное теоретическими выводами и связанное с жесткой зависимостью от постоянства угловой скорости вращения ωс сканирующего устройства, возможностью взаимодействовать только с идеальными световыми пучками, и жесткие требования к стабильности угловой скорости вращения.
Целью изобретения является повышение точности измерений, снижение габаритов, веса и времени регистрации путем расширения полосы ω пропускания электронного тракта и повышение производительности труда.
Указанная цель достигается тем, что способ геодезических измерений инженерных объектов заключается в измерении отклонений относительно опорного направления, задаваемого сканирующим лазерным пучком, ось вращения которого служит «рабочей мерой», относительно которой, с помощью отраженных лазерных пучков, производятся результирующие измерения импульсов в плоскости фоторегистраторов, решая задачи определения линейных смещений измеряемого объекта по двум координатам в масштабе реального времени с помощью марок, закрепленных на исследуемых точках объекта, и установленного в створе с ними лазерного передающего блока лазерной измерительной системы (ЛИС), содержащего полупроводниковый лазер, задающий референтное направление, блок сканирующего устройства, оптический преобразователь, преобразующий референтный лазерный пучок в след лазерной круговой развертки референтного лазерного пучка, блок оптической развертки и калиброванный оптико-электронный датчик «угол-код». В первом приеме сканирования вычисляют координаты Х0 и Y0 точки О, в дальнейшем принимаемую за реперную опорную точку начального положения объекта, при каждом последующем запуске ЛИС вычисляют координаты Xi и Yi каждой последующей точки Сi, которая является центром окружности следа лазерной круговой развертки в момент запуска ЛИС для данной точки, и по разности координат вычисляют смещения объекта от его начального положения методом решения «прямой геодезической задачи», а в программном обеспечении ЛИС используют прямоугольную геодезическую систему координат.
Устройство для реализации способа геодезических измерений инженерных объектов лазерными измерительными системами представляет из себя лазерное измерительное устройство, состоящее из двух блоков: лазерного передающего блока, содержащего полупроводниковый лазер, задающий референтное направление, блок сканирующего устройства, оптический преобразователь, преобразующий референтный лазерный пучок в след лазерной круговой развертки референтного лазерного пучка, блок оптической развертки и дополнительно введенный калиброванный оптико-электронный датчик «угол-код», центральная ось вращения которого жестко связана с осью вращения оптического блока круговой развертки и валом электродвигателя, обеспечивающего контроль за постоянством передачи сигналов, что позволяет исключить применение синхронного двигателя и значительно упрощает задачу исполнения лазерной измерительной системы (ЛИС) в целом. Приемный блок содержит фотоэлектронные марки, в которых референтный лазерный пучок, преобразованный в след лазерной круговой развертки, пройдя частично-отражающие поверхности, направляется на щелевые крест-анализаторы, формирующие импульсные сигналы, которые обрабатываются блоками регистрации измерительной информации, содержащие последовательно установленные фотодиодные матрицы, преобразователи сигналов и контроллеры измерительных марок. Сигнал с блоков регистрации измерительной информации поступает в компьютер, управляющий работой всей ЛИС, по специально заданной программе.
Сущность изобретения поясняется чертежами, где на Фиг.1 приведена функциональная блок-схема лазерной измерительной системы (ЛИС); на Фиг.2 приведен механизм вычисления текущих координат «прямой геодезической задачей»; на Фиг.3 показан механизм вычисления продольных и поперечных смещений по приращениям текущих координат; на Фиг.4 приведена блок-схема управления работой лазерной измерительной системой (ЛИС).
На Фиг.1 показана лазерная измерительная система (ЛИС), выполненная в виде двух блоков А и Б. Передающий блок А содержит полупроводниковый лазер - 1, создающий референтное направление - 2, блок сканирующего устройства - 3, оптический преобразователь - 4, преобразующий референтный лазерный пучок - 5, в след лазерной круговой развертки референтного лазерного пучка - 5ω, блок оптической развертки - 6 и калиброванный оптико-электронный датчик «угол-код» - 7. Принимающий блока Б содержит фотоэлектронные марки - 8, выполненные с возможностью активации, включающие последовательно расположенные частично-отражающие поверхности - 9, щелевые крест-анализаторы - 10 и блоки регистраторов измерительной информации - 11, которые содержат фотодиодные матрицы - 12, преобразователи сигналов - 13 и контроллеры - 14. Фотоэлектронные марки - 8 выполнены с возможностью активации. Количество фотоэлектронных марок - 8 соответствует количеству определяемых точек, а выходы фотоэлектронных марок - 8 подключены к управляющему компьютеру - 15. Блок питания - 16, подсоединен к электродвигателю постоянного тока - 17. L - длина трассы измерений и ее отрезков - L1, Li, Lk; O - центр круговой развертки сканирующего лазерного пучка; ω - след лазерной круговой развертки референтного лазерного пучка. На Фиг.2 приведен механизм вычисления текущих координат «прямой геодезической задачей»,
где R - радиус круговой развертки;
α - дирекционный угол, снятый с калиброванного оптико-электронного датчика «угол-код» - 7;
dх, dу - приращения координат точки T1 относительно точки Т0 в геодезической системе координат.
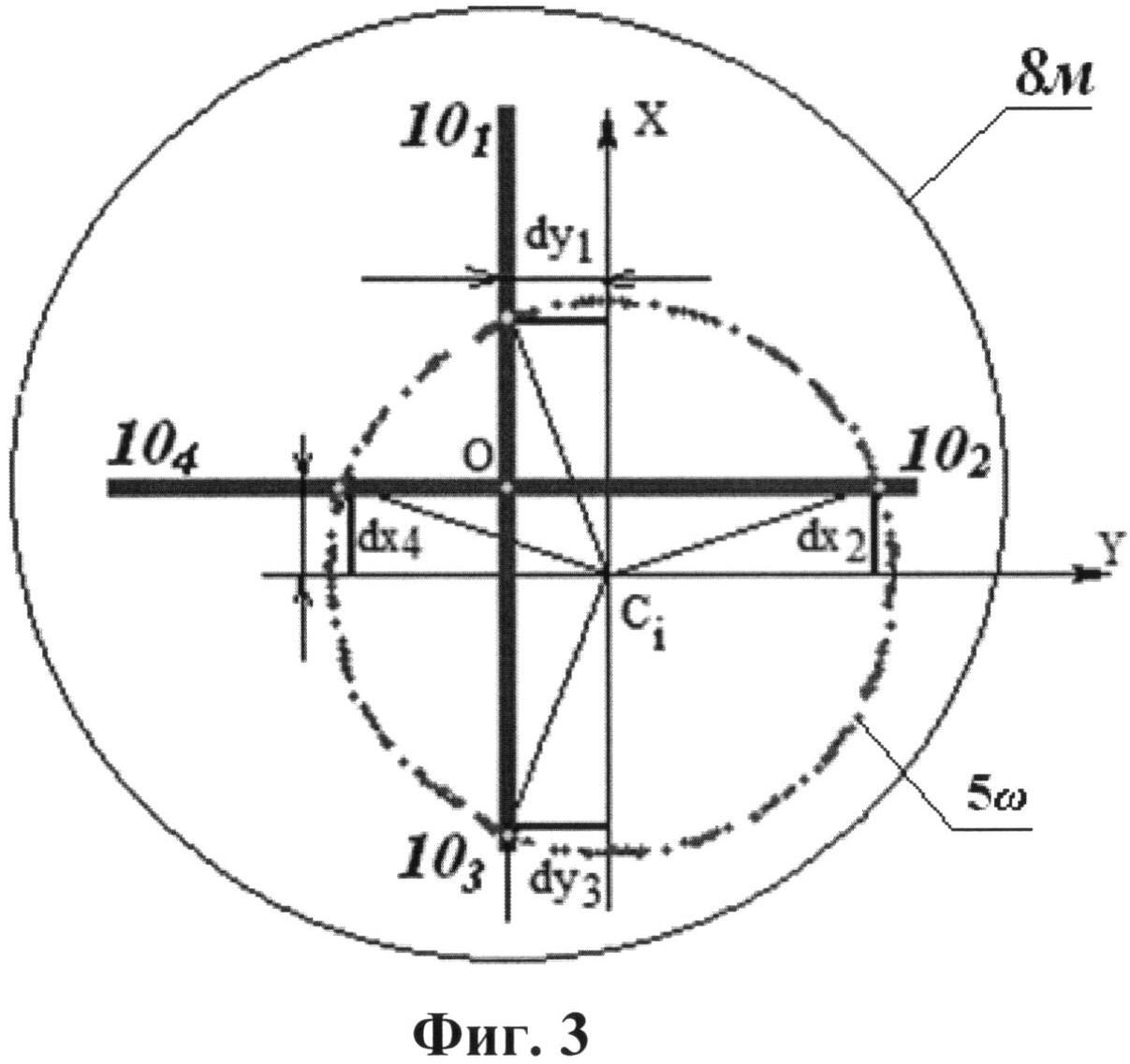
На Фиг.3 показан механизм вычисления продольных и поперечных смещений по приращениям текущих координат,
где 101, 102, 103, 104 - метки щелей крест-анализатора - 10;
Ci - центр окружности следа лазерной круговой развертки - 5ω;
8м - след активированной фотоэлектронной марки - 8;
О - центр щелевого крест-анализатора - 10, совпадающий с центром круговой развертки сканирующего лазерного пучка;
dy1 и dy2 приращения координат центра следа лазерной круговой развертки - 5ω относительно центра крест-анализатора - 10, вычисленные по меткам 101, 103;
dx2 и dx4 - приращения координат центра следа лазерной круговой развертки - 5ω относительно центра крест-анализатора - 10, вычисленные по меткам 102, 104.
На Фиг.4 приведена блок-схема управления работой лазерного измерительного устройства и последовательность операций определения приращений текущих координат при измерениях поперечных смещений исследуемого объекта.
Способ геодезических измерений инженерных объектов лазерными измерительными системами заключается в измерениях отклонений от референтного направления - 2, преобразованного из референтного лазерного пучка - 5 в след лазерной круговой развертки - 5ω, ось вращения которого служит «рабочей мерой». Относительно оси вращения следа лазерной круговой развертки - 5ω, с помощью отраженных лазерных пучков, производят результирующие измерения импульсов в плоскости фоторегистраторов фотодиодных матриц - 12 и определяют линейные смещения измеряемого объекта по двум координатам в реальном масштабе времени. Фотоэлектронные марки - 8 блока Б закрепляют на исследуемых точках объекта, а передающий блок А лазерной измерительной системы (ЛИС) выставляют в створе расположения всех фотоэлектронных марок - 8, при этом в первом приеме сканирования вычисляют координаты Х0 и Y0 точки О, в дальнейшем принимаемую за опорную точку начального положения объекта. В программном обеспечении ЛИС используют прямоугольную систему координат.
Диаметр референтного лазерного пучка - 5 Donm, образованного с помощью оптического преобразователя - 4 на отрезках L1, Li, Lk, а также в начале и в конце трассы длиной L=1÷ψ м определяют по формуле:
 ,
,
где L - длина трассы или ее отрезков,
λ - длина волны излучения используемого лазера,
ψ м - коэффициент оптической трансформации лазерного пучка на трассе измерений,
2π - const.
При каждом цикле в момент запуска ЛИС определяют координаты Xi и Yi центра окружности следа лазерной круговой развертки - 5ω каждой последующей точки Сi, расположенной на трассе L, и по разности координат вычисляют линейные смещения измеряемого объекта от его начального положения, решая «прямую геодезическую задачу».
ΔХi=Хi-ХO
ΔYi=Yi-YO
Данными для вычисления текущих координат центра круговой развертки являются:
- коды калиброванного оптико-электронного устройства - датчика «угол-код»;
- R - радиус вектора следа лазерной круговой развертки - 5ω;
- ответный импульс щелевого крест-анализатора - 10 в момент прохождения пятна следа лазерной круговой развертки - 5ω через щелевые крест-анализаторы - 10.
В качестве математического аппарата используют «прямую геодезическую задачу» для вычисления координат смещения каждой последующей точки объекта, которые определяют соотношением:
dx=Rcosα,
dy=Rsinα,
где R - радиус следа лазерной круговой развертки - 5ω;
α - дирекционный угол, снятый с калиброванного оптико-электронного устройства -датчика «угол-код»:
dx, dy - приращения координат точки T1 относительно точки Т0. Приращения координат вычисляют дважды (фиг.3) по противоположным меткам и регистрируют средние значения приращений.
Программу управления ЛИС выполняют в среде программирования «Delphi 6.0 м».
Управление осуществляют с удаленного компьютера через коммуникационный порт RS-232.
Блок-схема программы управления ЛИС и последовательность операций вычисления приращений текущих координат при измерениях линейных смещений исследуемого объекта по двум координатам приведена на Фиг.4.
При активации программы создают или указывают папку проекта исследуемого объекта, задают цикличность измерений положения всех фотоэлектронных марок - 8, установленных по трассе L, количество которых соответствует количеству определяемых точек, и активируют ЛИС, т.е. активируют коммуникационный порт RS-232. Подают команду на запуск двигателя - 17, команду активации фотоэлектронной марки - 8 и команду включения лазера - 1.
В течение 3-х секунд система работает вхолостую. В указанный промежуток времени выполняют контроль исполнения команд, а двигатель - 17 набирает стабильность оборотов.
Выполняется опрос калиброванного оптико-электронного датчика «угол-код» - 7 при прохождении нулевой точки. При получении отклика выполняется последовательный опрос контроллеров - 14 о положении лазерного пучка относительно креста-анализатора - 10.
При пересечении следом лазерной круговой развертки - 5ω меток щелей 101, 102, 103, 104 крест-анализатора - 10 выполняют опрос калиброванного оптико-электронного датчика «угол-код» - 7, а его значение регистрируется компьютером - 15.
Один цикл измерений соответствует опросу четырех щелей крест-анализатора - 10, при выполнении n-ого количества полных оборотов круговой развертки - 5ω, при этом количество полных оборотов n задается программой.
По окончании опроса фотоэлектронной марки - 8 вычисляют координаты центра следа лазерной круговой развертки - 5ω. Выполняют контроль на сходимость координат. Если контроль сошелся, вычисляется математическое ожидание координат центра следа лазерной круговой развертки - 5ω и выполняется оценка точности полученных координат по внутренней сходимости. Если контроль на внутреннюю сходимость не выполняется, измерения текущей марки повторяются заново.
Активированную фотоэлектронную марку - 8 выключают и активируют следующую марку. Приемы повторяют до окончания наблюдений последней заданной марки.
По окончании работы система автоматически выключается и переходит в режим ожидания следующего запуска. Запуск программы может осуществляться вручную, или автоматически, по установленному таймеру.
Данные по маркам - 8 сохраняются в файле проекта, при этом измерения сопровождаются датой и временем вычисления координат центра следа лазерной круговой развертки - 5ω. Данные, полученные в выбранном временном цикле наблюдений, представляются в графическом виде на бумажном носителе из «буфера памяти» или на экране монитора.
Лазерная измерительная система (ЛИС) выполнена в виде двух блоков А и Б. Передающий блок А содержит полупроводниковый лазер - 1, задающий референтное направление - 2, блок сканирующего устройства - 3, оптический преобразователь - 4, преобразующий референтный лазерный пучок - 5 в след лазерной круговой развертки референтного лазерного пучка - 5ω, и блок оптической развертки - 6 с калиброванным оптико-электронным датчиком «угол-код» - 7.
Принимающий блок Б выполнен в виде k-ого количества фотоэлектронных марок - 8, закрепленных на исследуемом объекте.
Передающий блок А выставляют в створе расположения всех фотоэлектронных марок - 8, установленных на определяемых точках измеряемого объекта по референтному направлению - 2.
При запуске передающего блока А полупроводниковый лазер - 7 задает референтное направление - 2, формирующееся оптическим преобразователем- 4 в референтный лазерный пучок - 5, который с помощью оптической развертки - 6, жестко связанным с калиброванным оптико-электронным датчиком «угол-код» - 7, преобразуется в след лазерной круговой развертки - 5ω по всей длине L измеряемой трассы (либо ее отрезков L1, Li, Lk), на которой располагают фотоэлектронные марки - 8. Референтный лазерный пучок - 5, преобразованный в след лазерной круговой развертки - 5ω, пройдя частично-отражающие поверхности - 9, направляется на щелевые крест-анализаторы - 10, формирующие импульсные сигналы, которые обрабатываются блоками регистрации измерительной информации - 11, содержащие последовательно установленные фотодиодные матрицы - 12, преобразователи сигналов - 13 и контроллеры измерительных марок - 14. Сигнал с блоков регистрации измерительной информации - 11 поступает в компьютер - 15, управляющий работой всей ЛИС, по специально заданной программе. Блок - 16 осуществляет питание лазера (3÷5В)-1 и двигателя постоянного тока (12В) - 17.
Для управления работой блока сканирующего устройства - 3 блоками регистрации измерительной информации - 11 и вычисления алгоритмов автоматической регистрации результатов для створных измерений на трассе измерений используют программное обеспечение ЛИС.
Для наблюдения и регистрации продольных и вертикальных смещений измеряемых объектов в системе ЛИС предусмотрено активирование фотоэлектронной марки - 8 в ее след - 8м (фиг.3).
При первом приеме сканирования вычисляют координаты Х0 и Y0 точки О. Принимают ее за опорную (реперную) точку начального положения объекта для точного совмещения центра следа лазерной круговой развертки - 5ω ЛИС с центром крест-анализаторов - 10 фотоэлектронных марок - 8.
В программном обеспечении ЛИС используют прямоугольную геодезическую систему координат (Фиг.2, 3).
При каждом последующем запуске ЛИС вычисляют координаты Xi и Yi точки Сi центра окружности следа лазерной круговой развертки - 5ω в момент запуска ЛИС. По разности координат вычисляют линейные смещения измеряемого объекта.
Вал двигателя постоянного тока - 17, ось вращения блока оптической развертки - 6 и ось калиброванного оптико-электронного датчика «угол-код» - 7 жестко связаны друг с другом в единую систему и обеспечивают контроль за постоянством передачи сигналов в ЛИС.
Таким образом, использование математического аппарата, наиболее адаптированного к геодезическим измерениям и позволяющего производить одновременные равноточные измерения в нескольких точках исследуемого объекта, расположенных в створе, существенно сокращает временные интервалы измерений, производимых в процессе длительного и непрерывного геодезического мониторинга, обеспечивая точность измерений на протяженных трассах или отрезках инженерных объектов
Способ оценки асимметрии формы тела человека по его рельефам
Способ гидравлической добычи угля из газонасыщенных пластов
Способ комбинированной разработки месторождений полезных ископаемых крутого падения вблизи водных объектов
Способ определения деформаций земной поверхности при отсутствии взаимной видимости между наблюдаемыми пунктами
Способ комбинированной (открыто-подземной) разработки месторождений полезных ископаемых в гористой и холмистой местности
Нивелирная рейка для геометрического нивелирования
Способ определения пространственного положения объектов и устройство для его осуществления
Стенд для поверки и калибровки измерительных систем "цифровой нивелир+кодовая рейка"
Способ термовлажностной обработки угольного массива растворами поверхностно-активных веществ (смачивателями) и устройство его реализующее
Способ оценки смачивающей способности растворов поверхностно-активных веществ в отношении минералов и горных пород
Способ гидравлической добычи угля из газонасыщенных пластов
Способ комбинированной разработки месторождений полезных ископаемых крутого падения вблизи водных объектов
Способ определения деформаций земной поверхности при отсутствии взаимной видимости между наблюдаемыми пунктами
Способ комбинированной (открыто-подземной) разработки месторождений полезных ископаемых в гористой и холмистой местности
Нивелирная рейка для геометрического нивелирования
Способ определения пространственного положения объектов и устройство для его осуществления
Стенд для поверки и калибровки измерительных систем "цифровой нивелир+кодовая рейка"
Способ термовлажностной обработки угольного массива растворами поверхностно-активных веществ (смачивателями) и устройство его реализующее
Способ оценки смачивающей способности растворов поверхностно-активных веществ в отношении минералов и горных пород
Способ извлечения запасов полезного ископаемого из целиков

