Результат интеллектуальной деятельности: САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД
Вид РИД
Изобретение
Изобретение относится к электроприводам и может быть использовано при создании их систем управления.
Известен самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, корректирующее устройство, усилитель, электродвигатель с редуктором, на выходном валу которого установлен датчик положения, выход которого подключен к первому входу первого сумматора, последовательно соединенные задатчик амплитуды, квадратор, блок деления, второй вход которого подключен к выходу первого источника постоянного сигнала, второй сумматор, первый блок извлечения квадратного корня, третий сумматор, второй вход которого подключен к выходу второго источника постоянного сигнала и второму входу второго сумматора, второй блок извлечения квадратного корня, интегратор, синусный функциональный преобразователь и блок умножения, второй вход которого подключен к выходу задатчика амплитуды, а выход - ко второму входу первого сумматора (см. патент РФ №2399080, Бюл. №25, 2010 г.).
Недостатком этого устройства является то, что в диапазоне повышенных рабочих частот ввиду приближенности описания используемой амплитудно-частотной характеристики (АЧХ) оно не обеспечивает максимальную скорость работы электропривода.
Известен также самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, корректирующее устройство, усилитель, электродвигатель с редуктором, на выходном валу которого установлен датчик положения, выход которого подключен к первому входу первого сумматора, последовательно соединенные квадратор, первый блок деления, второй вход которого подключен к выходу первого источника постоянного сигнала, и второй сумматор, последовательно соединенные интегратор, синусный функциональный преобразователь, первый блок умножения, второй вход которого подключен к выходу задатчика амплитуды, а выход - ко второму входу первого сумматора, последовательно соединенные второй источник постоянного сигнала и третий сумматор, последовательно соединение второй блок умножения, первый вход которого соединен с выходом квадратора и первыми входами четвертого, пятого и шестого сумматоров, третий блок умножения, второй блок деления, блок извлечения квадратного корня, седьмой сумматор, второй вход которого подключен к выходу задатчика амплитуды и второму входу третьего сумматора, четвертый блок умножения и восьмой сумматор, второй вход которого подключен к выходу третьего сумматора и входу квадратора, а выход - ко входу интегратора, последовательно соединенные пятый блок умножения, первый и второй входы которого подключены, соответственно, к выходам второго сумматора и блока извлечения квадратного корня, и третий блок деления, выход которого подключен ко второму входу четвертого блока умножения, а второй вход - к выходу первого источника постоянного сигнала, ко вторым входам четвертого, пятого и шестого сумматоров и первым входам четвертого, пятого и шестого блоков деления, причем второй вход четвертого блока деления, подключен к выходу пятого сумматора и второму входу второго блока умножения, второй вход пятого блока деления - к выходу шестого сумматора и второму входу третьего блока умножения, второй вход шестого блока деления - к выходу четвертого сумматора и второму входу второго блока деления, а выход - ко второму входу второго сумматора, третий и четвертый входы которого подключены, соответственно, к выходам четвертого и пятого блоков деления (см. патент РФ №2450300, Бюл. №13, 2012 г.).
Это устройство по своей технической сущности является наиболее близким к предлагаемому изобретению и принято за прототип. Его недостатком является то, что в диапазоне рабочих частот оно не позволяет сохранить заданную динамическую точность при изменении амплитуды задающего гармонического сигнала электропривода, если АЧХ этого привода в указанном диапазоне имеет большую кривизну.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение максимально возможной скорости работы электропривода в диапазоне рабочих частот, где его АЧХ имеет большую кривизну, при изменении амплитуды задающего гармонического сигнала без снижения заданной динамической точности.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного контура самонастройки, в котором формируется максимально возможное значение частоты задающего сигнала, а следовательно, и максимально возможная скорость работы электропривода без превышения допустимого значения динамической ошибки управления при текущем значении амплитуды гармонического входного сигнала.
Поставленная задача решается тем, что в самонастраивающийся электропривод, содержащий последовательно соединенные первый сумматор, корректирующее устройство, усилитель, электродвигатель с редуктором, на выходном валу которого установлен датчик положения, выход которого подключен к первому входу первого сумматора, последовательно соединенные квадратор, первый блок деления, второй вход которого подключен к выходу источника постоянного сигнала, и второй сумматор, последовательно соединенные интегратор, синусный функциональный преобразователь, первый блок умножения, второй вход которого подключен к выходу задатчика амплитуды, а выход - ко второму входу первого сумматора, последовательно соединенные второй блок умножения, первый вход которого подключен к выходу квадратора и первым входам третьего, четвертого и пятого сумматоров, третий блок умножения, второй блок деления, блок извлечения квадратного корня, шестой сумматор, второй вход которого подключен к выходу задатчика амплитуды и первому входу седьмого сумматора, четвертый блок умножения и восьмой сумматор, второй вход которого подключен ко входу квадратора, а выход - ко входу интегратора, последовательно соединенные пятый блок умножения, первый вход которого подключен к выходу второго сумматора, и третий блок деления, выход которого подключен ко второму входу четвертого блока умножения, а второй вход - к выходу источника постоянного сигнала, ко вторым входам третьего, четвертого и пятого сумматоров и первым входам четвертого, пятого и шестого блоков деления, причем второй вход четвертого блока деления подключен к выходу четвертого сумматора и второму входу второго блока умножения, второй вход пятого блока деления - к выходу пятого сумматора и второму входу третьего блока умножения, второй вход шестого блока деления - к выходу третьего сумматора и второму входу второго блока деления, а выход - ко второму входу второго сумматора, третий и четвертый входы которого подключены, соответственно, к выходам четвертого и пятого блоков деления, дополнительно вводятся последовательно соединение релейный элемент, шестой блок умножения, второй вход которого подключен к выходу седьмого сумматора и входу релейного элемента, девятый сумматор, второй вход которого подключен к выходу источника постоянного сигнала и второму входу седьмого сумматора, а выход - ко входу квадратора и к первому входу седьмого блока умножения, второй вход которого подключен к выходу блока извлечения квадратного корня, а выход - ко второму входу пятого блока умножения.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствует о его соответствии критерию "новизна". Это решение явным образом не следует из известного уровня техники, т.е. обладает критерием «изобретательский уровень», и промышленно применимо. При этом отличительные признаки формулы изобретения обеспечивают максимально возможную скорость работы электропривода в диапазоне рабочих частот, где его АЧХ имеет существенную кривизну, при сохранении заданной динамической точности управления в процессе изменения амплитуды входного гармонического сигнала.
На фиг.1 дана структурная схема самонастраивающегося электропривода, а на фиг.2 - объекты, поясняющие особенности и принцип работы предложенного устройства. На этих фигурах введены следующие обозначения: α - угол поворота выходного вала редуктора; αВХ - задающий (входной) гармонический сигнал, поступающий на вход электропривода; Ap, ωp - амплитуда и частота сигнала αвх>соответственно; U*, U - усиливаемый сигнал и сигнал управления электродвигателем 4, соответственно;  - ошибка электропривода; [ωmin, ωmax] - диапазон рабочих частот входного сигнала;
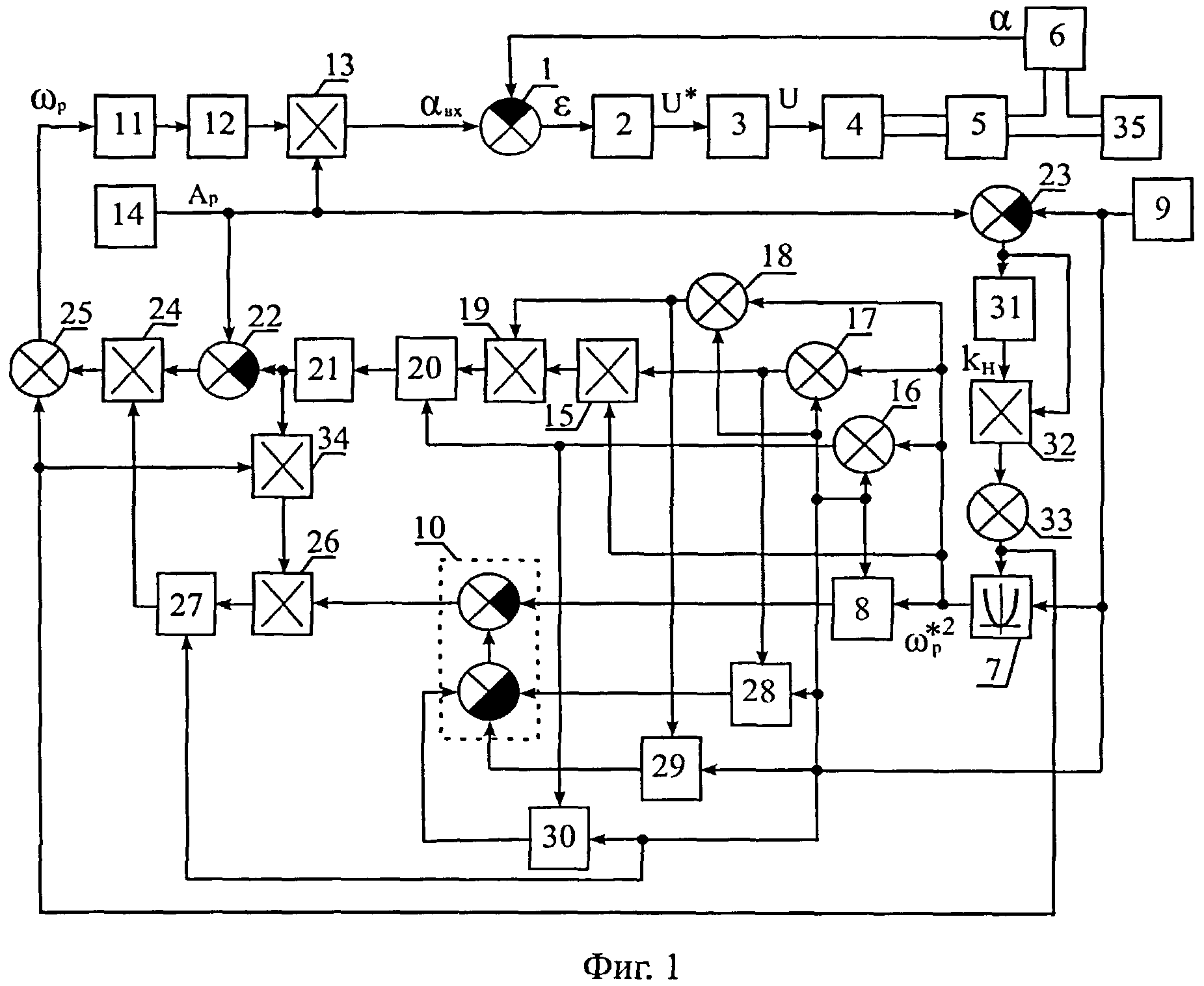
- ошибка электропривода; [ωmin, ωmax] - диапазон рабочих частот входного сигнала;  - середина диапазона изменения рабочих частот; Јi - заданное допустимое значение динамической ошибки работы рассматриваемого электропривода. Цифрой 1 на фиг.2 обозначена АЧХ рассматриваемого электропривода; A(ωmin), A(
- середина диапазона изменения рабочих частот; Јi - заданное допустимое значение динамической ошибки работы рассматриваемого электропривода. Цифрой 1 на фиг.2 обозначена АЧХ рассматриваемого электропривода; A(ωmin), A( ), A(ωmid), A(ωmax) - значения АЧХ на частотах ωmin,
), A(ωmid), A(ωmax) - значения АЧХ на частотах ωmin,  и ωmid, ωmax, соответственно; цифрами 2 и 3 - секущие, соединяющие, соответственно, точки A и B, B и C на этой АЧХ; а цифрой 4 - касательная к АЧХ в точке D с абсциссой
и ωmid, ωmax, соответственно; цифрами 2 и 3 - секущие, соединяющие, соответственно, точки A и B, B и C на этой АЧХ; а цифрой 4 - касательная к АЧХ в точке D с абсциссой  F (с абсциссой
F (с абсциссой  ), G, H - точки пересечения горизонтальной прямой, имеющей ординату Ap/ε1, с АЧХ 1, секущей 2 и касательной 4, соответственно.
), G, H - точки пересечения горизонтальной прямой, имеющей ординату Ap/ε1, с АЧХ 1, секущей 2 и касательной 4, соответственно.
Самонастраивающийся электропривод содержит последовательно соединенные первый сумматор 1, корректирующее устройство 2, усилитель 3, электродвигатель 4 с редуктором 5, на выходном валу которого установлен датчик 6 положения, выход которого подключен к первому входу первого сумматора 1, последовательно соединенные квадратор 7, первый блок 8 деления, второй вход которого подключен к выходу источника 9 постоянного сигнала, и второй сумматор 10, последовательно соединенные интегратор 11, синусный функциональный преобразователь 12, первый блок 13 умножения, второй вход которого подключен к выходу задатчика 14 амплитуды, а выход - ко второму входу первого сумматора 1, последовательно соединенные второй блок 15 умножения, первый вход которого подключен к выходу квадратора 7 и первым входам третьего 16, четвертого 17 и пятого 18 сумматоров, третий блок 19 умножения, второй блок 20 деления, блок 21 извлечения квадратного корня, шестой сумматор 22, второй вход которого подключен к выходу задатчика 14 амплитуды и первому входу седьмого сумматора 23, четвертый блок 24 умножения и восьмой сумматор 25, второй вход которого подключен ко входу квадратора 7, а выход - ко входу интегратора 11, последовательно соединенные пятый блок 26 умножения, первый вход которого подключен к выходу второго сумматора 10, и третий блок 27 деления, выход которого подключен ко второму входу четвертого блока 24 умножения, а второй вход - к выходу источника 9 постоянного сигнала, ко вторым входам третьего 16, четвертого 17 и пятого 18 сумматоров и первым входам четвертого 28, пятого 29 и шестого 30 блоков деления, причем второй вход четвертого блока 28 деления, подключен к выходу четвертого сумматора 17 и второму входу второго блока 15 умножения, второй вход пятого блока 29 деления - к выходу пятого сумматора 18 и второму входу третьего блока 19 умножения, второй вход шестого блока 30 деления - к выходу третьего сумматора 16 и второму входу второго блока 20 деления, а выход - ко второму входу второго сумматора 10, третий и четвертый входы которого подключены, соответственно, к выходам четвертого 28 и пятого 29 блоков деления, последовательно соединение релейный элемент 31, шестой блок 32 умножения, второй вход которого подключен к выходу седьмого сумматора 23 и входу релейного элемента 31, девятый сумматор 33, второй вход которого подключен к выходу источника постоянного сигнала 9 и второму входу седьмого сумматора 23, а выход - ко входу квадратора 7 и к первому входу седьмого блока 34 умножения, второй вход которого подключен к выходу блока 21 извлечения квадратного корня, а выход - ко второму входу пятого блока 26 умножения. Объект управления 35.
Самонастраивающийся электропривод работает следующим образом. Сигнал ошибки ε на выходе сумматора 1, первый отрицательный (со стороны датчика 6) и второй положительный входы которого имеют единичные коэффициенты усиления, после коррекции в блоке 2, усиливаясь, поступает на вход электродвигателя 4, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от поступающего сигнала U. Как известно, величина ошибки с при использовании корректирующего устройства 2 с постоянной структурой и постоянными параметрами будет увеличиваться при увеличении нагрузки на электропривод, т.е. при увеличении амплитуды Ap и частоты ωp входного сигнала αВХ. То есть, если при текущем значении Ap величина ε становится меньше допустимой, то можно увеличивать ωp, а следовательно, и скорость (производительность) работы электропривода, не снижая заданную динамическую точность управления.
На выходе задатчика 14 формируется сигнал Ap, а на выходе источника 9 - единичный сигнал. Первый (со стороны задатчика 14) положительный и второй отрицательный входы сумматора 23 имеют, соответственно, коэффициенты усиления, равные 1/ε1 и A(ωmid). В результате на его выходе формируется сигнал Ap/ε1-A(ωmid).
Релейный элемент 31 имеет следующие выходные характеристики:
Первый (со стороны элемента 31) и второй положительные входы сумматора 32, соответственно, имеют коэффициенты усиления, равные  и
и  В результате на его выходе формируется сигнал kн=k1 или kн=k2.
В результате на его выходе формируется сигнал kн=k1 или kн=k2.
Первый (со стороны блока 34) и второй положительные входы сумматора 33 имеют коэффициенты усиления, равные единице и ωmid, соответственно. В результате, на его выходе формируется сигнал 
Первые положительные входы сумматоров 16, 17 и 18 (со стороны квадратора 7) имеют коэффициенты усиления  соответственно, а их вторые положительные входы - единичные коэффициенты усиления. В результате на выходе блока 21 формируется сигнал
соответственно, а их вторые положительные входы - единичные коэффициенты усиления. В результате на выходе блока 21 формируется сигнал 
Первый (со стороны блока 21) отрицательный вход сумматора 22 имеет коэффициент усиления, равный Л, а второй положительный - коэффициент усиления 1/ε1. В результате на его выходе формируется сигнал 
На выходах блоков 8, 28, 29 и 30, соответственно, формируются сигналы 
Первый (со стороны блока 8), третий (со стороны блока 28) и четвертый (со стороны блока 29) отрицательные входы сумматора 10 имеют коэффициенты усиления, равные  соответственно, а второй положительный вход - коэффициент усиления -
соответственно, а второй положительный вход - коэффициент усиления -  . В результате на выходе сумматора 10 формируется сигнал
. В результате на выходе сумматора 10 формируется сигнал  а на выходе блока 27 - сигнал
а на выходе блока 27 - сигнал

Первый (со стороны блока 24) и второй положительные входы сумматора 25 имеют коэффициенты усиления, равные 1/К и 1, соответственно. В результате, на его выходе сформируется сигнал

определяющий частоту ωp, обеспечивающую максимально возможную скорость гармонического движения электропривода с ошибкой, не превышающей ε1.
На выходе интегратора 11, имеющего единичный коэффициент усиления, формируется сигнал ωpt, а на выходе функционального преобразователя 12 - сигнал sinωpt. В результате на выходе блока 13 формируется искомый гармонический сигнал αвх=Apsinωpt с задаваемой амплитудой Ap и автоматически формируемой частотой ωp, который и обеспечивает максимально возможную скорость работы электропривода (для заданных величин ε1 и Ap), когда его АЧХ имеет большую кривизну в диапазоне рабочих частот.
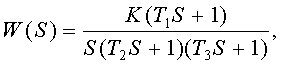
Для пояснения этого факта отметим, что корректирующее устройство 2, обеспечивающее устойчивость работы рассматриваемого электропривода, имеет вид:
где T1>Т2=const, T1=1/ωср=const, ωср - частота среза АЧХ электропривода. В результате передаточная функция прямой цепи электропривода с учетом этого корректирующего устройства примет вид:
а его АЧХ - вид:

где 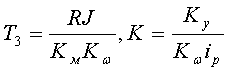 , R - активное сопротивление якорной цепи электродвигателя; Kм, Кω - соответственно, коэффициенты крутящего момента и противоЭДС; Kу - коэффициент усиления усилителя 3; J -суммарный момент инерции, приведенный к валу электродвигателя; ip - передаточное отношение редуктора.
, R - активное сопротивление якорной цепи электродвигателя; Kм, Кω - соответственно, коэффициенты крутящего момента и противоЭДС; Kу - коэффициент усиления усилителя 3; J -суммарный момент инерции, приведенный к валу электродвигателя; ip - передаточное отношение редуктора.
Известно (см. Попов Е.П. Теория линейных систем автоматического регулирования и управления. М.: Наука, 1978. - 256 с.), что при гармоническом управлении электроприводом с рабочей амплитудой Ap, частотой ωp и динамической ошибкой, не превышающей величины ε1, должно выполняется неравенство
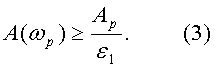
В результате с учетом выражений (2) и (3) можно записать равенство
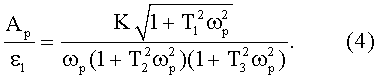
Однако получить аналитическое выражение, описывающие зависимость 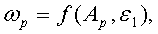 весьма сложно (см. выражение (4)). Поэтому
весьма сложно (см. выражение (4)). Поэтому
вначале целесообразно линейно аппроксимировать текущую АЧХ двумя отрезками прямых (ввиду большой кривизны АЧХ), а затем с помощью полученных линейных зависимостей по известной ординате  уже находить частоту ωp.
уже находить частоту ωp.
Из фиг.2 видно, что при аппроксимации участка падающей АЧХ 1 в диапазоне рабочих частот, например, секущей 2, для известной ординаты  будет найдена частота
будет найдена частота  (см. абсциссу точки G на фиг.2), большая искомой частоты
(см. абсциссу точки G на фиг.2), большая искомой частоты  (см. абсциссу точки F). Но использование
(см. абсциссу точки F). Но использование  при формировании сигнала αВХ неизбежно приведет к тому, что динамическая точность системы ухудшится, превысив ε1. Для исключения этого при расчете ωp в предлагаемом устройстве используется касательная 4 к АЧХ в точке D, которая имеет абсциссу ωp. Используя уравнение этой касательной
при формировании сигнала αВХ неизбежно приведет к тому, что динамическая точность системы ухудшится, превысив ε1. Для исключения этого при расчете ωp в предлагаемом устройстве используется касательная 4 к АЧХ в точке D, которая имеет абсциссу ωp. Используя уравнение этой касательной  где
где  производная A(ω) в точке
производная A(ω) в точке  можно определить абсциссу ωp точки Н, имеющей ординату -
(см. фиг.2). Эта абсцисса в данном устройстве формируется на выходе сумматора 25 (см. выражение 1) и является искомой частотой задающего гармонического сигнала.
можно определить абсциссу ωp точки Н, имеющей ординату -
(см. фиг.2). Эта абсцисса в данном устройстве формируется на выходе сумматора 25 (см. выражение 1) и является искомой частотой задающего гармонического сигнала.
Очевидно, что указанный выбор ωp приводит к незначительному снижению быстродействия системы, поскольку  (см. фиг..2), но при этом всегда будет выполняться главное неравенство
(см. фиг..2), но при этом всегда будет выполняться главное неравенство  , для обеспечения которого и создавалось предлагаемое устройство. При этом ωp и
, для обеспечения которого и создавалось предлагаемое устройство. При этом ωp и  всегда будут достаточно близки.
всегда будут достаточно близки.
Зная величину Ap/ε1 и A(ωmid) можно однозначно определить одну из двух секущих (2 или 3), которая используется в текущий момент времени (см. фиг.2) для определения ωp. Если  то используется секущая 2, а если
то используется секущая 2, а если  то - секущая 3. Указанный выбор осуществляется с помощью релейного элемента 31 автоматически.
то - секущая 3. Указанный выбор осуществляется с помощью релейного элемента 31 автоматически.
Гидроагрегат
Устройство для механической обработки легко деформируемых деталей
Электромашина
Электропривод манипулятора
Способ приготовления мясо-растительных полуфабрикатов в оболочке
Паштетные консервы на основе субпродуктов
Кормовая оконечность судна ледового плавания
Судовое рулевое устройство
Устройство для передачи информации автономному подводному аппарату
Устройство для передачи энергии автономному подводному аппарату
Способ получения шоколадной глазури
Способ получения молочного напитка
Способ изготовления имплантата для пластики дефектов костной ткани
Электромашина
Купол
Консервы на основе субпродуктов
Вертикально-осевая ветроустановка
Способ определения канцерогенности вещества
Способ стабилизации подводного аппарата в режиме зависания
Способ получения дисперсной частицы

