УСТРОЙСТВО ОПЕРАТИВНОГО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ В АКВАТОРИЯХ МИРОВОГО ОКЕАНА
Вид РИД
Изобретение
Изобретение относится к техническим средствам освоения Мирового океана и предназначено для реализации процесса обнаружения и распознавания (классификации) подводных объектов, как неподвижных, так и движущихся в шаровом слое радиусом до 5 км относительно точки начала момента обследования заданного водного объема, а также, при необходимости, и структуры земной коры под дном океана низкочастотным гидролокатором, используемым в качестве инструмента обнаружения, пеленгования и идентификации (классификации) различных подводных объектов и базирующемся на транспортном модуле. Синтез транспортного модуля и электронной аппаратуры конструктивно является автономным, необитаемым подводным аппаратом (АНПА). Процессу обнаружения и классификации в данном описании присвоен термин «освещение» подводной обстановки.
Проверка предложенного изобретения на соответствие изобретательского уровня, проведена по патентным базам Роспатента (www.fips.ru), Патентного ведомства США (www.fips.gov), Европейского патентного ведомства. В просмотренных материалах идентификация подводных объектов (в подавляющих случаях миноподобных) производится либо амплитудным методом, когда определяется сила цели подводного объекта и, иногда, его протяженность гидролокатором переднего обзора, либо косвенным методом по конфигурации тени, создаваемой находящимся на дне объектом при его облучении гидролокаторами бокового обзора, либо по телевизионному изображению подводного объекта. Только в одном случае запатентовано устройство, классифицирующее миноподобный объект путем выявления его физических характеристик методом спектральной обработки эхо-сигналов. Кроме вышеприведенных, использовались материалы Федерального государственного бюджетного учреждения науки Институт проблем морских технологий ДВ О РАН, изложенные в статье Д.Г.Ляхова «СОВРЕМЕННЫЕ ЗАДАЧИ ПОДВОДНОЙ РОБОТОТЕХНИКИ» [14]. В этих материалах рассмотрены типовые задачи по назначению необитаемых подводных аппаратов с акцентом на современные подходы к их применению и разработке. Анализируются характеристики коммерческих продуктов, показатели качества и пути их достижения. С момента появления в 1950-х годах необитаемые подводные аппараты (НПА) к 2000 году прошли длительный период экспериментальных образцов и опытной эксплуатации.
За последний десяток лет некоторые разработки нашли применение в нескольких областях уже в качестве законченных продуктов с внятной моделью использования и сериями в сотни экземпляров, другие по разным причинам развития не получили [14]. Приводится классификация коммерчески доступных подводных аппаратов, достаточно подробно изложенных в руководящих документах международной ассоциации морских подрядчиков - The International Marine Contractors Association (IMCA). Констатируется, что основными по численности являются телеуправляемые по кабелю аппараты рабочего (РТПА; с манипуляторами) и осмотрового (ТНПА; без манипуляторов) классов. Упомянутые типы подводных аппаратов идентификаторами или классификаторами на основе гидроакустического поля не снабжаются, т.к. функции РТПА и ТНПА не подразумевают их использование.
Offshore. Задачи освоения шельфа и коммерческое использование
В начале 2000-х в среде разработчиков подводной техники наблюдалась уверенность, что АНПА будут весьма широко использоваться на стадиях инженерных изысканий и инспекций, например, при прокладке межконтинентальных подводных кабелей и для других видов подводного строительства. Однако, по прогнозам, нескольких десятков комплексов вполне достаточно для подводных строек всего мира. До настоящего времени АНПА еще не получили рынка, сравнимого даже с рынком РТПА, весьма скромного по индустриальным масштабам.
Oceanalogy. Научно-исследовательские задачи.
К концу 90-х многие центры по изучению океана (WHOI.MBARI, NERC, JAMSTEC IFREMER) разработали, изготовили и успешно использовали в морских исследованиях как телеуправляемые по кабелю, так и автономные НПА. «Научные» АНПА «HUGIN» (1993 г.), «WHOI ABE» (1994 г.), «NERC AUTOSUB» (1996 г.), «MIT Odyssey» (1997 г.) открыли для океанологов совершенно новые возможности ведения глубоководных океанских и подледных полярных исследований, так что даже возник вопрос, не заменят ли АНПА научные суда? Авторы данной статьи отмечают четко наметившуюся тенденцию создания исследовательских аппаратов большой автономности типа «Autosub Long Range» и «Tethys» на основе существующих «литиевых» энергетических бюджетов, но с бортовой аппаратурой крайне низкого энергопотребления (единицы/десятки Вт) и адаптивного управления движением с элементами дрейфа и «планирования».
Оборонные задачи и средства
В открытой печати публикуется немало материалов, позволяющих судить о последовательной и системной работе зарубежных оборонных ведомств в области информатизации и роботизации всех видов военной техники. В военно-морской робототехнике также заметна значительная активность. Агентство передовых оборонных исследовательских проектов США (DARPA) в 1986 г. инициировало программу «Joint advanced-technology UUV program». С появлением таких программ, находящихся в открытом доступе, достаточно детально сформулированы сферы применения и типовые характеристики НПА, среди которых основными являются противоминные, разведывательные и противолодочные действия. В прошедшем десятилетии пристальное внимание уделялось противоминной тематике Surface and shallow water mine countermeasure (SMCM). Под «surface» здесь понимается то, что аппараты разворачиваются с надводных кораблей, а не с подводных лодок. «Лодочные» американские проекты «NMRS», «LMRS», «ADUUV», «MRUUV» подразумевают развертывание посредством торпедного аппарата. Экспериментальные образцы такого типа были разработаны и продемонстрированы стартапом Nekton Researcha AUV «Fest 2005». Nektonesearch впоследствии вошел крупную американскую оборонную компанию «iRobot». АН ПА «BPAUV» и «BMI SMCM» типоразмера 533 мм на базе «Bluefin-21» с 2006 г. В 2011 г. Управление военно-морских исследований ВМФ США (Office of Naval Research, ONR) провело сбор заявок по теме «Large Displacement Unmanned Underwater Vehicle Innovative Naval Prototype» (LDUUV INP). Автономность прототипа АНПА должна составлять 50-70 суток, рабочая глубина - 100-300 м, основная задача - проведение разведывательных действий в прибрежных зонах неприятеля.
Поисковая и спасательная задачи
За последние 10 лет было произведено 26 поисковых операций упавших в воду самолетов, в 17 случаях глубины затонувших обломков превышали водолазные и поэтому были использованы НПА. При поиске обломков АЗЗО (AIR France, рейс 447, 2009-2011 г.г.) на глубине 4 км применялась «AHPAREMUS 6000», показав поисковую производительность около 100 км2 в сутки.
Ведущая роль информационных технологий.
Основой современных технологических комплексов, в том числе подводных, является получение, обработка и использование информации. Современный НПА по сути является автоматизированной системой технологического процесса сбора и обработки информации о подводной обстановке. На основе введенных критериев качества, стоимости и достоверности этой информации разрабатываются аппаратные и программные элементы средств получения этой информации (разного рода сенсоры), а затем и средства несения этих сенсоров под водой - сам по себе аппарат и система управления им.
В дополнение к перечисленным выше материалам следует учитывать, что в процессе разработок и проведения натурных испытаний НПА были выявлены следующие проблемы. В материалах, посвященных идентификации и классификации подводных объектов, например в «A SYSTEM FOR AUTOMATIC DETECTION AND CLASSIFICATION FOR A MINE COUNTERMEASURE AUV Konstantinos Siantidis, Ursula Holscher-HobingATLAS ELEKTRONIK GmbH Sebaldsbrucker Heerstra.e 235 D-28309 Bremen GERMANY», подчеркивается, что основным недостатком миссии по обнаружению, идентификации или классификации подводного объекта и принятия решения существующими на сегодня методами является увеличения вдвое общего времени на всю миссию из-за наличия задержки между временем обследования подводного объекта и оценкой полученных данных. Поэтому рекомендуется обнаружение и классификацию производить в режиме «онлайн». Это тем более актуально, что в настоящее время наиболее сложные задачи, такие как самостоятельное принятие решений в условиях неопределенности, распознавание образов, идентификация и классификация объектов, как правило, решаются средствами носителя с участием человека и, что характерно, по недостаточно достоверным данным. Таким образом, представляется целесообразным попытаться решать задачи, которые позволят качественно улучшить следующие направления в освоении Мирового океана:
- научно-исследовательские задачи;
- оборонные задачи и средства;
- поисковая и спасательная задачи;
- получение, обработка и использование информационных технологий в подводных комплексах.
Качественное улучшение при решении указанных задач возможно при реализации подводных аппаратов, производящих самостоятельную идентификацию подводных объектов в заданном районе Мирового океана, что позволит:
- сократить требования к автономности АНПА за счет сокращения времени получения, обработки и принятия решения по классификации подводных объектов;
- увеличить дистанции обнаружения и число обнаруженных и классифицируемых объектов;
- снизить время поиска затонувших объектов;
- получать, обрабатывать и использовать информацию (для принятия решений на борту АНПА) без участия человека.
В связи с тем, что во всех вышеприведенных материалах отсутствует даже упоминание об идентификации подводных объектов с использованием низкочастотного гидроакустического поля (кроме патента США [10]), дополнительно произведен анализ возможности идентификации различных подводных объектов по их физическим характеристикам на основании имеющихся теоретических и экспериментальных работ, связанных с этой тематикой.
В работах [1], [2], [3], [4], [5], [6], [7], [13] теоретически обосновываются возможности распознавания подводных объектов по их физическим характеристикам путем анализа спектра эхо-сигналов в области низких частот (десятки Гц - единицы кГц) или путем измерения искажения фаз в принятом эхо-сигнале.
В работах [1] и [2] показано, что при облучении сферы звуком, длина волны которого изменяется в широких пределах (от случая превышения длиной излученной волны длины окружности сферы до противоположного случая) существует зависимость, связывающая геометрические размеры сферы (ее радиуса) с частотой зондирующего сигнала.
Работа [2] посвящена расчетам спектров эхо-сигналов от цилиндрических и вытянуто-сфероидных воздухозаполненных оболочек (вычисление спектров эхо-сигналов от упругих оболочек).
В работе [3] исследовано влияние основных размеров и формы рассеивающего звук тела на спектральный состав эхо-сигналов. Приводятся расчеты для сферической, вытянуто-сфероидальной и цилиндрической оболочки, заполненной водой. Взаимное расположение спектральных составляющих может быть использовано для определения габаритных размеров (длины и диаметра) сферы, сфероида и цилиндра. Различная кривизна поверхностей рассеивающих звук тел вызывает изменения в расположении отдельных спектральных составляющих максимумов в форме спектра эхо-сигнала. Для сферической оболочки отдельные спектральные составляющие обнаруживают вырождение. Когда сфера деформируется в эксцентрический, а затем в сильно вытянутый эксцентрический сфероид, это вырождение устраняется - появляется большое количество максимумов в спектре эхо-сигнала. Спектр сфероида отличается от спектра конечного круглого цилиндра с тем же отношением длины к диаметру. Т.о. по взаимному расположению отдельных максимумов в спектре отраженного сигнала можно судить о форме распознаваемого тела.
В работах [4] и [5] рассматриваются способы выявления резонансных частот в спектре эхо-сигнала при помощи как длинных тональных зондирующих импульсов, так и коротких широкополосных импульсов. Первые применяются при слабо демпфированных колебательных системах с высокой добротностью. При этом частота заполнения зондирующего импульса совпадает с частотой резонансных колебаний объекта. В случае, когда слабо демпфированные колебания являются маломощными источниками переизлучения звука, влияние которых на спектр отраженного сигнала незначительно, возбуждение упругой воздухозаполненной оболочки вытянутого - сфероидального - тела на низких частотах характеризуется сильным излучением звука для тех мод колебаний, которым соответствует постоянная демпфирования высокого уровня. При этом целесообразно применять короткие широкополосные импульсы. В этом случае можно выявить резонансные колебания в широкой полосе, исследуя сплошной спектр эхо-сигнала.
В работе [6] рассматриваются методы определения диаметров сферических или цилиндрических тел в зависимости от материала заполнителя и толщины оболочки:
- тонкая оболочка, заполненная жидкостью;
- сплошная металлическая оболочка при известном материале;
- оболочка при неизвестном материале.
Деформируемость тела под действием падающих звуковых колебаний, возникновение периферических и других волн можно использовать для распознавания тел по форме огибающей отраженного сигнала. Для характеристики формы тела, а именно для распознавания сферической и цилиндрической оболочек, рекомендуется использовать соотношение между отдельными максимумами эхо-сигнала, полученного при применении зондирующего импульса в форме передаточной функции исследуемого тела, выделенной из эхо-сигнала путем деления его спектра на спектр зондирующего импульса и выполнения обратного преобразования Фурье. При этом, если амплитуда первого максимума эхо-сигнала превышает амплитуды следующих максимумов, то оболочка является цилиндрической. В противном случае оболочку можно считать сферической.
Коэффициент отражения звуковых колебаний зависит от толщины оболочки, материала заполнителя и частоты заполнения зондирующих импульсов. При облучении оболочки с жидким заполнителем часть звуковой энергии проходит через упругую оболочку в жидкий заполнитель. Коэффициент прохождения звука зависит от частоты заполнения зондирующего импульса. При облучении воздухозаполненной оболочки отсутствует прохождение звуковых волн в материале заполнителя, коэффициент отражения не зависит от частоты заполнения зондирующих импульсов. Это свойство можно использовать при распознавании одних оболочек от других.
В работе [7] исследуются признаки, полученные в результате натурных испытаний, по которым можно классифицировать материалы тел, подвергшихся облучению звуком. Например, отражение звуковых колебаний от акустически жестких тел, импедансы которых больше, чем у воды, происходит практически без изменения фазы, а отражение от акустически мягких тел сопровождается изменением фазы звуковых колебаний почти на 180 градусов. Это свойство отраженных сигналов используют при распознавании материалов тел. Так как при распространении акустических сигналов в водной среде начальная фаза звуковых колебаний изменяется на неизвестную величину, для определения изменения фазы в эхо-сигнале при отражении используется сравнение ее с фазой некоторого опорного сигнала, распространяющегося совместно с измеряемым эхо-сигналом. С этой целью излучают одновременно два сигнала с отличающимися на кратную величину частотами (удобнее в два раза). Разность фаз принятых эхо-сигналов измеряется с помощью специальных алгоритмов.
Кроме описанного выше фазового метода определения материала тел можно определять материал тел и другими способами. Из работ Е.Скучика следует, что для распознавания материалов тел может быть использовано различие их добротностей.
Добротность различных материалов зависит от частоты и обратно пропорциональна коэффициенту потерь, обусловленному диссипативными свойствами материала. Для определения добротности материала требуется измерить резонансную частоту механической системы путем ее определения в спектре эхо-сигнала и ширину полосы системы по уровню 0,7 от максимальной амплитуды звукового давления. Частное от деления значения резонансной частоте на ширину полосы системы определяет величину добротности. При этом следует облучать тела длинными акустическими сигналами, состоящими из нескольких длинных зондирующих импульсов. Величина добротности для различных тел может изменяться в пределах от единицы до миллиона, а диапазон частот спектров эхо-сигнала - от десятков Гц до одного МГц.
Измеряя частоту резонансных максимумов в спектре эхо-сигнала, можно определить диаметр, форму и материал подводного объекта, а измеряя изменение фазы, принятой несущей эхо-сигнала относительно несущей зондирующего сигнала, - его материал. Отсюда следует, что возможно распознавание (классификация) подводных объектов при организации облучения акватории низкочастотными (от десятков Гц до единиц кГц) зондирующими посылками различной длительности и конфигурации (причем в одном акустическом цикле) и обработкой спектров полученных эхо-сигналов, а также измерения их фазовых характеристик. Однако реализация низкочастотных антенн на плавсредствах либо связана с большими затруднениями из-за их габаритов, либо вообще невозможна.
Ниже приведены ориентировочные оценки габаритов электроакустических преобразователей (антенн), которые могли бы быть использованы в схемах традиционных гидролокаторов для обнаружения и классификации.
Если требуется обнаружить и классифицировать подводные объекты диаметром 0,5 м и, например, 10 м, то при d=0,5 м f=1022 Гц, λ=С/f, λ=1,47 м, а при d=10 м f=51 Гц λ=29 м. Известно, что для формирования характеристики направленности с приемлемыми параметрами линейная протяженность антенны (L) должна быть не менее 3÷4 λ, т.е при d=0,5 м L≥6 м, при d=10 м L≥116 м. Понятно, что при таких габаритах эти антенны можно разместить либо на стационарном устройстве, либо на плавсредствах большого водоизмещения, что не способствует решению задачи оперативного освещения подводной обстановки с помощью АНПА. В то же время технические возможности нелинейной гидроакустики [8] позволяют решать подобные задачи. По этой причине в заявляемом устройстве предлагается использовать параметрический излучатель (ПИ) и параметрический приемник (ПП). ПИ обладает рядом уникальных свойств:
- угловая ширина диаграммы в реальных условиях обычно не превышает нескольких градусов;
- излучение волны разностной (низкой) частоты происходит в основном вперед - вдоль оси распространения пучков накачки и под малыми углами к оси;
- почти полностью отсутствуют боковые лепестки в диаграмме направленности;
- изменением частоты накачки в пределах резонансной кривой преобразователя накачки можно добиться плавной перестройки разностной (низкой) частоты в широких пределах (коэффициент перекрытия достигает 300 и более).
Все эти свойства указывают на целесообразность применения в заявляемом устройстве параметрических излучателей и параметрических приемников (ПИ и ПП), обладающих широкой полосой рабочих частот, малыми габаритами, постоянной и гладкой характеристикой направленности на различных частотах. Однако параметрические излучатели и приемники имеют существенный недостаток, а именно - низкую эффективность преобразования. Но потери преобразования первичной волны в звук разностной частоты можно скомпенсировать либо применением широкополосного или многокомпонентного зондирующего сигнала, позволяющего увеличить энергию преобразования ВЧ-сигнала в сигнал разностной частоты, тем самым повысив дальность действия гидролокатора в 1,5-2 раза [15], либо усилением эхо-сигнала при обработке [11].
Современные гидролокаторы, работающие, как правило, в диапазоне несущих частот, длина волны которых меньше отражающей поверхности подводного объекта, не могут с достаточной достоверностью распознать (классифицировать) этот объект из-за того, что его основные физические характеристики (кроме скорости движения и протяженности) явно не участвуют в формировании параметров эхо-сигнала. Кроме того, некоторые признаки трудно распознаваемы либо из-за гидрологических условий, либо из-за наличия естественных или искусственных помех. Поэтому требуются устройства распознавания, лишенные указанных недостатков. При исследованиях Мирового океана кроме сведений об искусственных подводных объектах часто необходима информация об окружающей обстановке (ледовой, рельефе морского дна, составе земной коры под дном океана на расстояниях от единиц м до единиц км и т.п.). Такие сведения могут быть достоверно получены только при условии идентификации подводных объектов по их физическим характеристикам (габаритам, форме, материалу и т.д.). Причем для эффективного решения поставленных задач необходимы следующие условия:
- идентификация подводных объектов и их координаты должны определяться в момент обнаружения этих объектов и, при необходимости (например, по запросу корабля-носителя), передаваться на него по любой линии связи, в том числе по гидроакустической;
- обнаружение подводных объектов должно происходить, при необходимости, на всех курсовых углах (от 0 до 180 градусов левого и правого борта АНПА от момента начала его движения);
- принятие решения о дальнейших действиях АНПА может производиться либо сразу после идентификации подводного объекта в соответствии с заложенной программой, либо по командам с корабля-носителя.
Предлагаемые конструктивные решения позволяют, не меняя принципиального построения структурной схемы гидролокатора (в соответствии с современной тенденцией сокращения финансовых расходов при новых разработках и не в ущерб качеству), создать принципиально новое устройство, позволяющее решать указанные выше задачи, т.е. целый ряд дополнительных прикладных программ.
В качестве прототипа способа и устройства, производящего классификацию подводного объекта, конкретно миноподобного, по его физическим характеристикам принимается патент США №3.716.823, МКИ G01S 9/66, приоритет от 15.12.60. "Полихроматическая гидроакустическая система классификации" [10].
У автора патентуется:
1. Аппаратура для определения того, аналогичен ли подводный объект по размерам и конструкции мине, в состав которой входит устройство для излучения в направлении указанного объекта акустических волн, длина которых в одном диапазоне частот больше предполагаемых внешних размеров мин, а в другом диапазоне частот длины волн в два раза больше величины толщины стенок корпуса мины, средство для приема отраженных сигналов неизвестного спектра, рассеянного указанным объектом, и компьютер с каналами памяти, в котором хранятся записи эталонных отраженных сигналов от известных мин, для сравнения принятых сигналов с эталонами и выработки сигнала решения, отражающего результаты сравнения.
2. Устройство для определения внешнего размера подводной гидроакустической цели в пределах выбранного диапазона размеров в сочетании со средствами излучения в направлении указанной цели полосы частот, длины волн которых равны выбранным внешним размерам мины, средство для приема отраженных указанной целью сигналов и несколько соединенных с ним полосовых фильтров, которые выбирают из указанных сигналов только отличающийся по амплитуде отклик и вырабатывают выходной сигнал, пропорциональный амплитуде его спектральных составляющих, в силу чего длина волны отраженного сигнала с самой большой амплитудой является мерой внешнего диаметра (размера) цели.
3. Сочетание средств согласно п.2, в состав которых входит также средство использования фильтров выходных сигналов для установления идентичности принятого и эталонного сигнала.
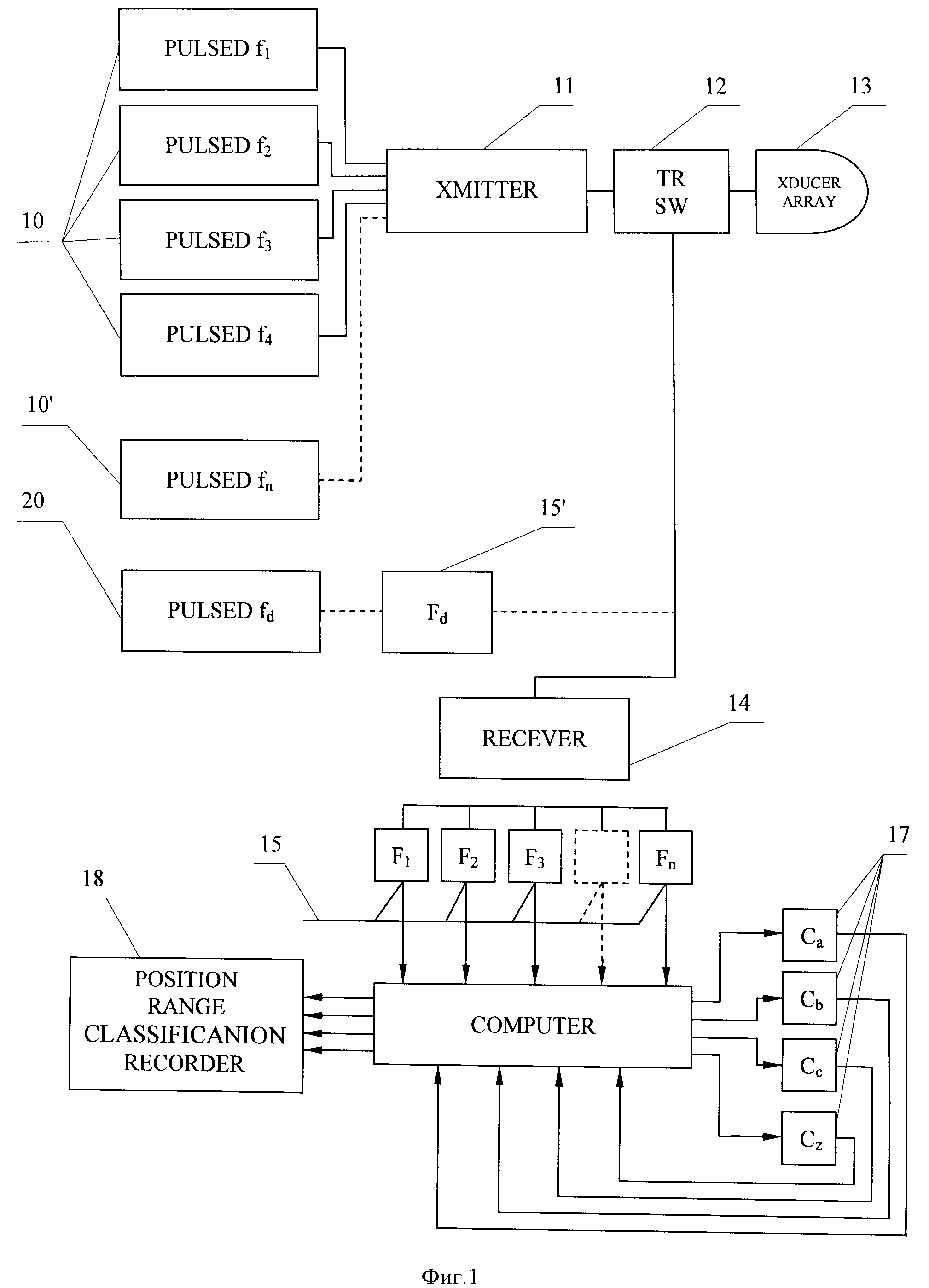
Полихроматическая система, реализующая данное изобретение, изображена на фигуре 1.
Аппаратура состоит из «n» генераторов радиочастотных импульсов (10) на частотах f1-fn. Генераторы запускаются одновременно с заданной частотой повторения, зависящей от максимальной дальности. Длительность суммарного излученного импульса будет зависеть от двух факторов: от требуемой разрешаемой способности по дальности и от ширины спектра сигнала, излучаемого каждым генератором.
Длительности импульсов разных генераторов могут быть разными. Сигналы с генераторов (10) поступают на усилитель мощности (11), который через переключатель приемо-передач (12) возбуждает антенну (13), излучающую импульсный сигнал. Эта же антенна принимает отраженные сигналы. Они через переключатель (12) попадают на приемник (14) с изменяющимся во времени коэффициентом усиления.
Приемник многоканальный по частотам, чтобы учесть различия в поглощении на разных частотах. С приемника (14) сигнал поступает на систему параллельных полосовых фильтров (15).
Полоса фильтра должна быть согласована с соответствующей полосой частот соответствующего генератора (10). С фильтров (15) сигнал идет на компьютер (16), который сравнивает спектр отраженного сигнала со спектрами различных целей из памяти (17) и выносит решение о присутствии типа цели. Сигнал принятого решения подается на записывающее устройство классификатора (18) с дальнейшей передачей на цифровые индикаторы.
Информацию о местоположении цели можно получить любым известным способом с помощью отдельной аппаратуры. На фигуре 1 эта часть схемы обозначена пунктирными линиями.
Предложенная в патенте гидролокационная аппаратура не предназначена для освещения подводной обстановки, а позволяет распознавать строго определенное, достаточно незначительное количество типов подводных целей. Это определяется шириной полосы пропускания традиционных антенн, которая у современных гидроакустических систем достигает, в лучшем случае, 30-50% от резонансной частоты антенны. В результате уменьшается диапазон частот, в котором антенна может эффективно преобразовывать электрические и акустические сигналы.
Например, при диаметре цели 0,5 м частота резонанса эхо-сигнала ≈1000 Гц. Если у антенны ширина полосы 50% от резонансной, т.е. 500 Гц, то это означает, что эффективно излучать и принимать сигналы такая антенна сможет на частоте не ниже 750 Гц (ожидаемый диаметр цели ≈0,7 м) и не выше 1250 Гц (ожидаемый диаметр цели ≈0,4 м). Но главная особенность такого устройства - это заранее выбранная резонансная частота такой антенны и, как следствие, неэффективность ее применения при обнаружении подводных объектов других типов или размеров, т.е. невозможность выполнения задач по поиску, обнаружению и классификации различных подводных объектов одним устройством, т.е. задача освещения подводной обстановки становится неэффективной.
Одновременно следует обратить внимание на то обстоятельство, что антенны подобного типа "насасывают" реверберационную помеху не только по достаточно широкому основному лепестку характеристики направленности антенны, но и через побочные максимумы. Узкополосная реверберационная помеха, в ряде случаев, способна замаскировать эхо-сигнал и помешать как обнаружению, так и распознаванию, а также и определению местоположения цели.
Целью настоящего предложения является выработка предложений, направленных на разрешение существующих проблем с помощью АНПА, предназначенного для освещения подводной обстановки, основными из которых являются:
- преодоление существующей неопределенности о подводной обстановке в результате обоснованного принятия решения на борту АНПА о типе обнаруженных подводных объектов без привлечения оператора-человека;
- создание устройства с заложенным программным обеспечением, осуществляющим одновременное руководство системой управления движением АНПА и управление циклами работы гидролокатора, реализующего формирование характеристик направленности в режимах излучения и приема и алгоритмы обработки принятой информации.
Указанные цели достигаются синтезом устройства, состоящего из транспортной платформы и размещенным на ней, наряду со штатным оборудованием, низкочастотным гидролокатором, имеющем в своем составе параметрический излучатель, излучающий низкочастотное акустическое поле, и параметрический приемник, осуществляющий в приеме спектральную и фазовую обработку эхо-сигнала с целью выделения в нем характерных признаков подводной цели по заранее введенной или оперативно переданной по существующим каналам связи с носителем программе.
Возможность определения физических характеристик подводного объекта по низкочастотному эхо-сигналу от него объясняется взаимодействием первичной падающей на объект волны и вторичных волн, образующихся внутри и вокруг этого объекта, и наличием результатов этого взаимодействия в спектре эхо-сигнала.
Существенными отличительными признаками заявляемого устройства от существующих НПА и прототипа являются:
1) возможность оперативного освещения заданной акватории Мирового океана с производительностью поиска, обнаружения и классификации подводных объектов в просматриваемом объеме водной среды ≈0.05 км3 за 1 с и дистанции обнаружения и классификации подводных объектов до 5 км за ≈7 с (длительность акустического цикла) путем применения на подводном аппарате малогабаритного гидролокатора с рабочей полосой в низкочастотном (десятки Гц ÷ единицы кГц) диапазоне акустического поля, позволяющего осуществлять плавную перестройку рабочей частоты в сотни раз (коэффициент перекрытия может достигать 100 и более) и широкополосное излучение и прием с целью обнаружения и классификации ≥5 подводных объектов за один акустический цикл;
2) формирование, с помощью традиционных высокочастотных антенн гидролокаторов, широкополосного, узконаправленного (единицы градусов), низкочастотного излучения (при фактическом отсутствии побочных максимумов) и направленного приема, позволяющего улучшить соотношение эхо-сигнал/низкочастотный шум и эхо-сигнал/реверберация;
3) реализация единой структурной схемы устройства, пригодной практически для всех режимов его работы необходимой для обнаружения и классификации подводных объектов (программа управления этими режимами может задаваться либо перед стартом, либо вводиться во время работы устройства по каналам связи с носителем подводного аппарата)
Т.о. заявляемое устройство обладает существенными отличиями.
Положительный эффект, который может быть достигнут при реализации заявляемого устройства:
- возможность разрешения неопределенности о подводной обстановке (вследствие обоснованного принятия решения о типе обнаруженных подводных объектов) на борту без привлечения оператора-человека;
- возможность отказа в большинстве случаев от проводных или волоконно-оптических линий связи и перехода, при необходимости, на акустические линии связи с использованием принципов нелинейной гидроакустики;
- повышенная помехоустойчивость, по сравнению с традиционными гидролокаторами и прототипом, за счет реализации параметрической антенны с незначительным телесным (несколько градусов) угловым раствором основного лепестка характеристики направленности и практически полностью отсутствующим боковым полем, что фактически обеспечивает отсутствие реверберационной помехи и способствует увеличению вероятности правильного обнаружения и классификации подводных целей;
- повышенная помехозащищенность за счет распознавания (классификации) подводных объектов по их физическим характеристикам (габаритам, форме, материалу) одновременно с их обнаружением;
- возможность одновременного (в течение одного акустического цикла) обнаружения и классификации более 5 подводных объектов разного типа (в прототипе не более одного типа и классификация только после обнаружения);
- принципиальная возможность геолокации земной коры за счет узкой (до 3-5°) диаграммы направленности в частотном диапазоне десятков или сотен Гц.
Ниже представлены ориентировочные числовые значения некоторых параметров заявляемого устройства, определяющие его облик и принципиальную возможность его физической реализации, полученные расчетным путем или заимствованные из уже реализованных приборов.
К таким параметрам относятся:
- акустическая мощность антенны накачки «Wн» (Вт);
- амплитуда звукового давления на выходе электроакустического преобразователя (антенны) высокочастотного сигнала накачки: «Рн» (Па) или 20 lg Рн (дБ);
- амплитуда звукового давления зондирующего импульса низкой частоты (на выходе параметрической антенны и на расстоянии r от НПА) Ps (Па) или 20 log Ps (дБ);
- амплитуда звукового давления эхо-сигнала на входе акустико-электрического преобразователя НПА, пришедшего с расстояния r (м): Psэ (Па) или 20 lg Рsэ (дБ);
- «коэффициент концентрации» в излучении, зависящий от площади антенны на носовом срезе НПА и частоты (длины волны) накачки «Y»;
- амплитуда Рк комбинационной частоты ωк в приеме;
- ширина диаграммы направленности приемной антенны «θ»;
- спектральная плотность шумов моря на частотах = до 100 Гц=60 дБ.
Примечание:
- величина шумов моря ≈60 дБ выбрана в связи с тем, что собственные шумы глубокого моря изменяются в широких пределах именно на низких частотах (от 85 до 40 дБ относительно 1 мкПа). В мелком море уровни шумов в прибрежных водах отличаются еще большей изменчивостью. Кроме того, шум в глубоком море не является изотропными, обладает направленностью и пространственной когерентностью [5], поэтому для оценочных расчетов выбрано некоторое среднее значение низкочастотных шумов моря.
- ширина диаграммы направленности в излучении на частотах десятков и сотен Гц была оценена по аналогии с существующей на приборе НАИ-7 (производства ТРУ), в ≈4°.
Ниже приводятся расчетные значения перечисленных параметров.
Амплитуда звукового давления на расстоянии (r=1 м) от антенны накачки:
 или 234 дБ/1 мкПа
или 234 дБ/1 мкПа
где  ;
;
ρ - плотность воды =103 кг/м3;
SПа≈0,2-0,3 м2;
с - скорость звука в воде =1500 м/с;
λ=0,1 м (f=15 кГц);
Wн≈5 кВт.
Амплитуда звукового давления в зондирующем импульсе разностной частоты на расстоянии r [12]:
 или 112,46 дБ/1 мкПа
или 112,46 дБ/1 мкПа
где Рн=5·105 (Па);
Ks=0,21 (F=50 Гц, С=1500 м/с);
а=0,2 м (радиус апертуры антенны накачки);
r=5000 м (дистанция от НПА до цели).
Амплитуда звукового давления в эхо-сигнале, пришедшем на вход НПА с дистанции 5000 м:
Psэ=Ps/r Psэ=8,4·10-5 Па или 38,5 дБ/1 мкПа
где r=5000 м.
Рs=0,42 Па.
Сила цели (СЦ) сферы, обусловленная процессом рассеяния, а не отражения [5]. При этом в [13] высказываются соображения, что если тело любой формы имеет размеры меньше длины падающей волны, то процесс рассеяния от него эквивалентен рассеянию от сферы, а это в свою очередь означает независимость от курсового угла.
СЦ=10log[1,082·103a6/λ4]=13,2 дБ или 4,6 м.
где а=5 м; λ=30 м.
С учетом приведенных числовых значений (в дБ) амплитуды эхо-сигнала и сила цели суммарный эхо-сигнал будет равен:
38,5 дБ(Psэ)+13,2 дБ(СЦ)=51,7 дБ или 363 мкПа.
Т.о. суммарный уровень эхо-сигнала ≈ на 9 дБ ниже шумов моря и заявленное устройство без конструктивных доработок не сможет обнаружить цель на низких частотах.
В разрабатываемых НПА предлагается для улучшения управляемости на малых скоростях устанавливать дополнительные вертикальные и горизонтальные рули в носовой оконечности. Корпуса носовых и кормовых рулей можно использовать в качестве держателей антенны накачки (на носу) и приемной антенны (на корме), см. фигуру 11, тем более что значение частоты в приеме существенной роли не играет. Частоту можно взять высокую (до 100 кГц) для удобства размещения элементов параметрического приемника.
Ширина характеристики направленности в приеме описывается выражением [12]: θ≈(Ks·L)-1/2
где L=6 или 8 м.
Тогда θ составляет величину либо 51°, либо 44°, а объем водного пространства, воспринимающего шумы из этого объема, составляет либо 19,6 км3, либо 17,2 км3. Объем полусферы, генерирующий шумы из моря, равен (при радиусе 5 км) 261,5 км3.
Объем водного пространства, ограниченного характеристикой направленности приемного тракта (при θ=51°), воспринимающей шумы из моря, меньше объема водного пространства полусферы, генерирующей низкочастотные шумы (концепция принятая автором для прикидочных расчетов), в 13,36 раза (≈22,5 дБ). Таким образом превышение эхо-сигнала над шумами (22,5-8,3) равно 14,2 дБ (или 15,3 дБ) т.е. 5,1 или 5,82 раза, что обеспечивает вероятность правильного обнаружения 0,8-0,9 при вероятности ложной тревоги не хуже 10-3-10-4.
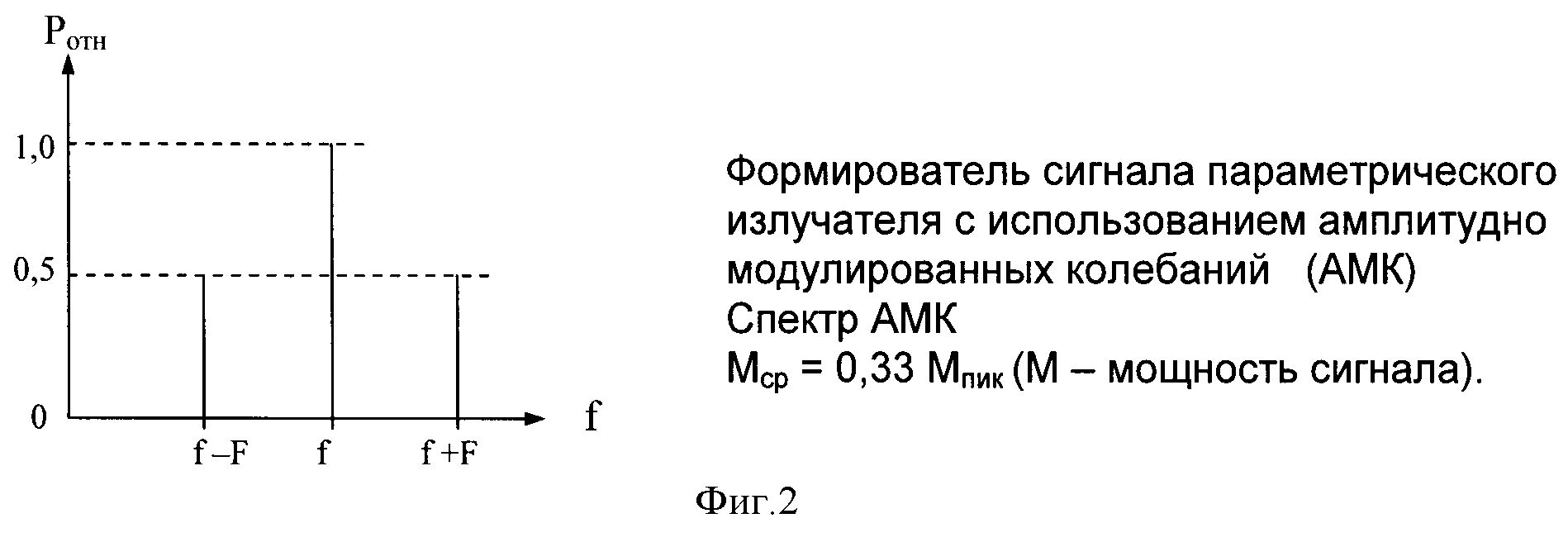
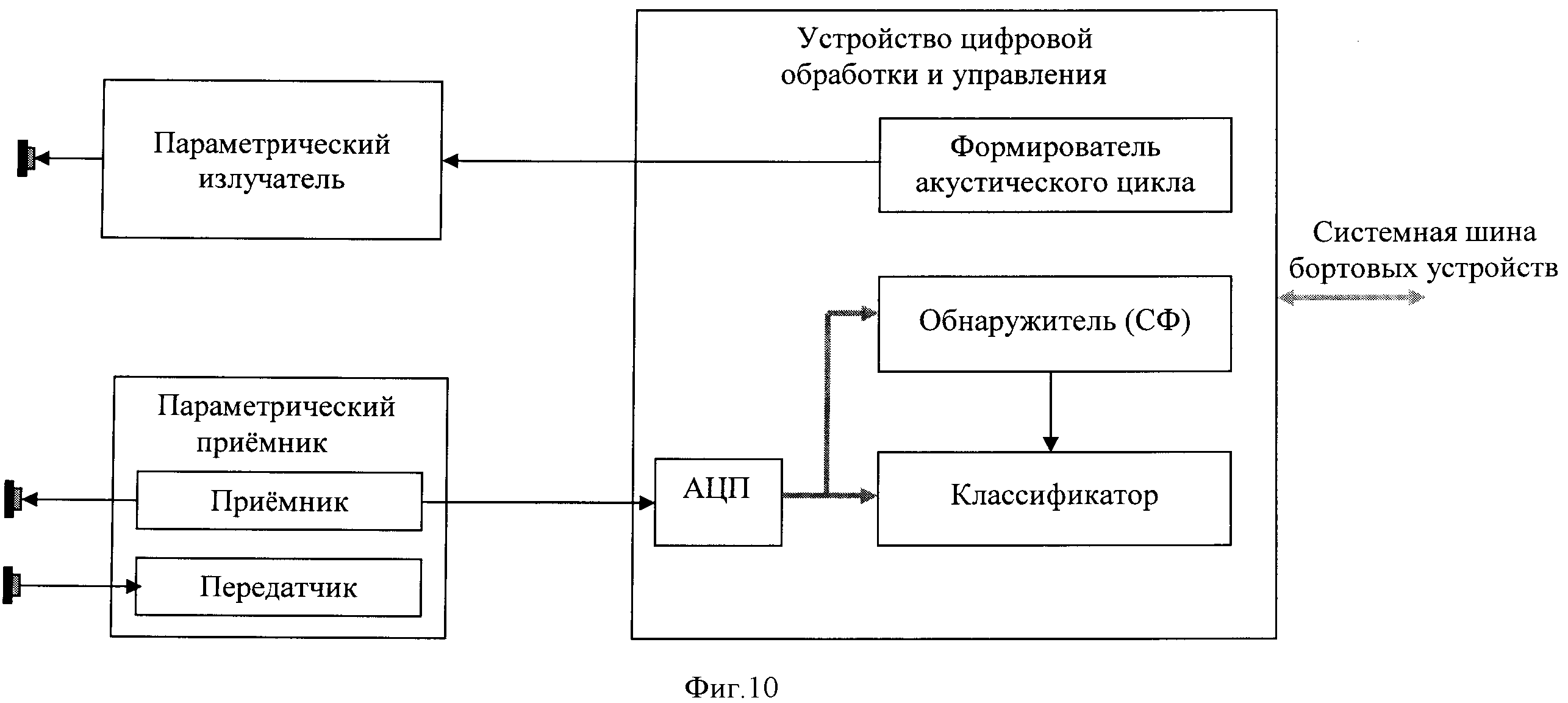
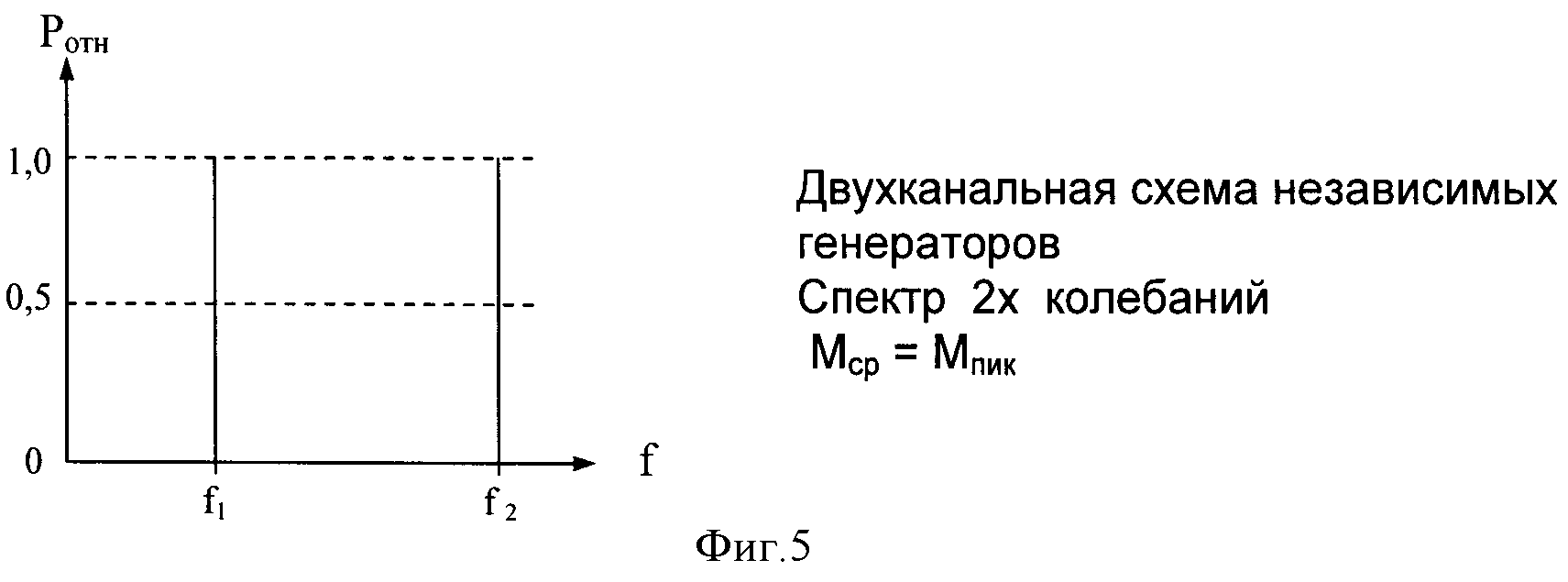
На фигурах 2, 3, 4, 5, 6, 7 представлены, в качестве примера, спектральные диаграммы, которые можно организовать на программном уровне и через ЦАП-ы преобразовать, с помощью задающего генератора, усилителя мощности и электроакустического преобразователя, в акустическую посылку антенны накачки на штатной частоте гидролокатора (в нашем случае 15-20 кГц для параметрического излучателя и 50-100 кГц для параметрического приемника). На фигуре 10 представлена структурная схема параметрического гидролокатора.
Анализ вышеприведенных структурных схем и спектральных диаграмм показывает, что:
1. При АМК в результате взаимодействия несущей частоты f с каждой из боковых частот образуется разностная частота, амплитуда которой на 3 дБ больше, чем в любом другом методе формирования, а разностная частота F акустического сигнала совпадает с частотой модуляции.
2. При двухполосном сигнале (DSB) спектрограмма сигнала на выходе балансного модулятора содержит только две спектральные составляющие, а сигнал несущей частоты подавлен. При нелинейном акустическом взаимодействии боковых спектральных составляющих частота разностного сигнала равна удвоенной частоте модулирующего сигнала 2F. В параметрической антенне с DSB формирователем возможно появление акустических сигналов с частотой F (результат взаимодействия несущей частоты f с боковыми частотами).
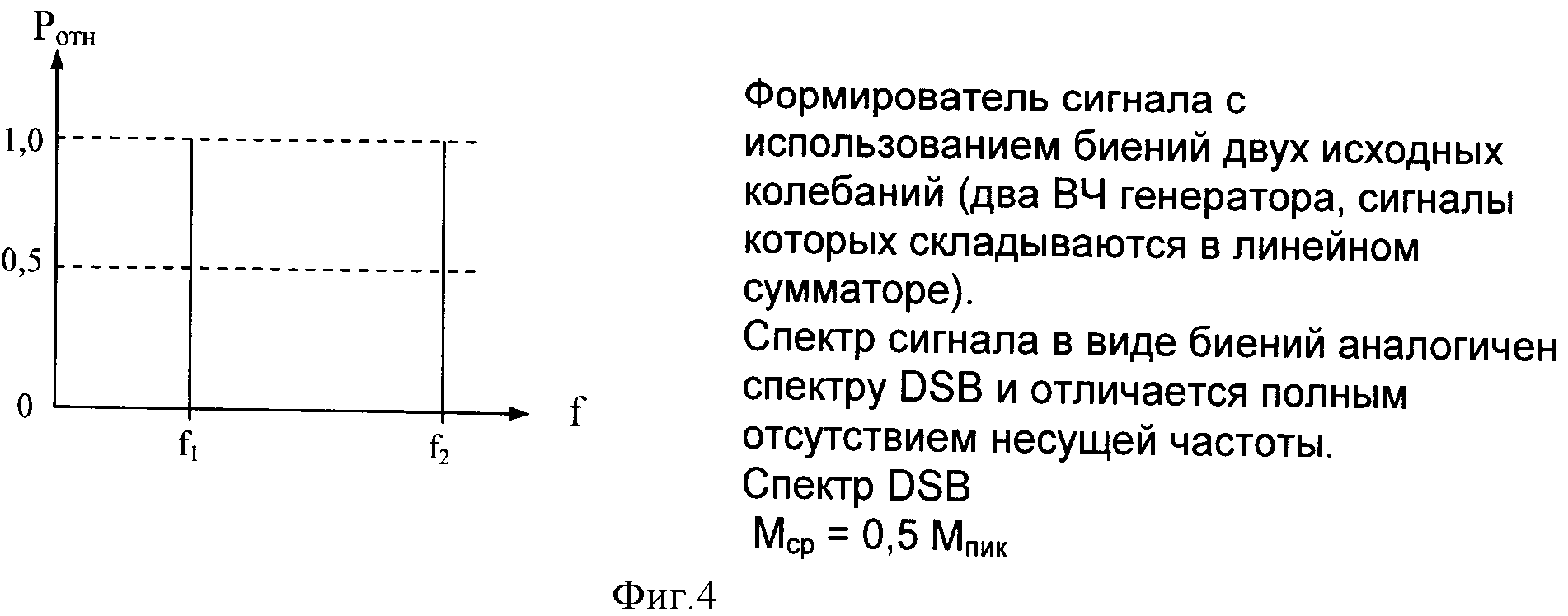
3. При формировании сигнала с использованием биений двух исходных колебаний следует иметь в виду, что спектр сигнала аналогичен спектру DSB и отличается только полным отсутствием несущей частоты. Частота сигнала в этом случае F=f2-f1. Гармоники более высоких порядков практически отсутствуют. Использование этого метода позволяет формировать и более сложные сигналы.
4. При использовании двухканального метода полностью исключается взаимодействие исходных частот в электронном тракте. Появляется возможность независимой регулировки амплитуды и частоты в каждом канале. Двухканальный метод позволяет формировать сложные сигналы (ЧМ и ЛЧМ с опорным сигналом).
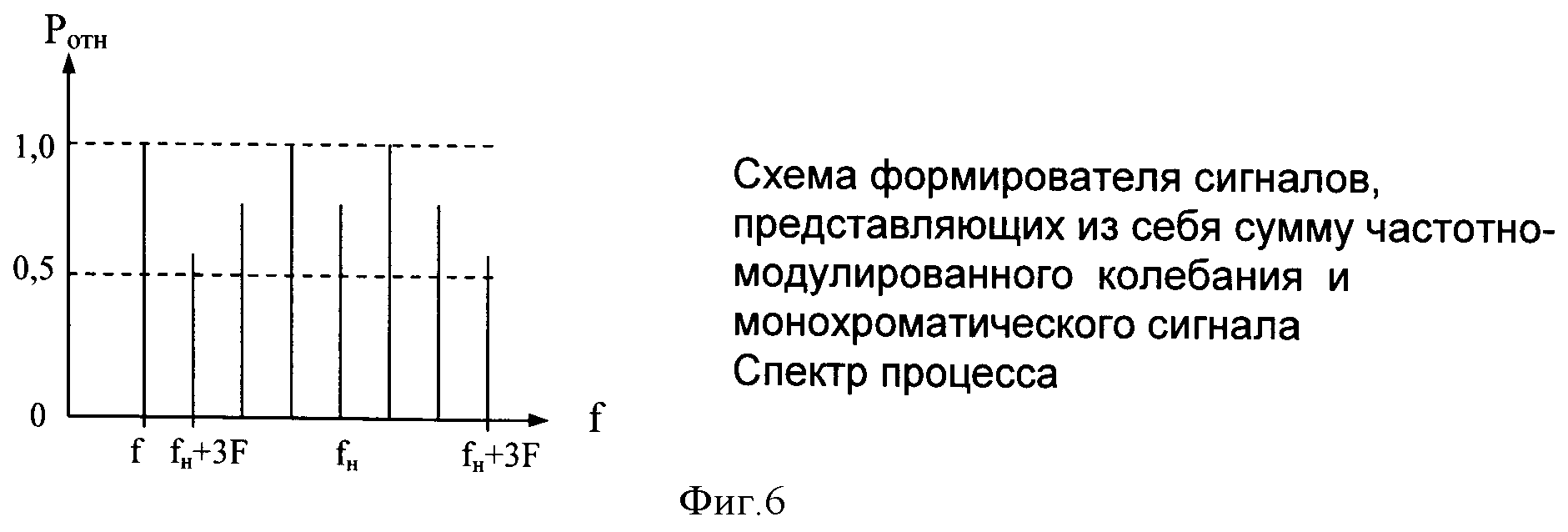
5. Сигнал в виде суммы частотно-модулированного колебания и монохроматического колебания имеет спектральный состав более сложный, чем в предыдущих случаях. В результате нелинейного акустического взаимодействия между опорным и ЧМ сигналом в среде возникает так же ЧМ колебание с девиацией частоты и частотой модуляции, как у исходного ЧМ сигнала и несущей частотой Fн=fн±f. Суммарные частоты быстро затухнут и произойдет перенос спектра ЧМ сигнала в низкочастотную область.
6. Сигнал, сформированный в виде суммы линейно-частотно-модулированного (ЛЧМ) сигнала и опорного монохроматического колебания может работать только в импульсном режиме. В результате взаимодействия исходных сигналов накачки в среде возникает ЛЧМ сигнал, девиация частоты которого примерно равна девиации частоты исходного ЛЧМ сигнала. Создание акустического свип-генератора с широким диапазоном изменения частоты возможно благодаря использованию эффекта нелинейного взаимодействия акустических сигналов при распространении в среде.
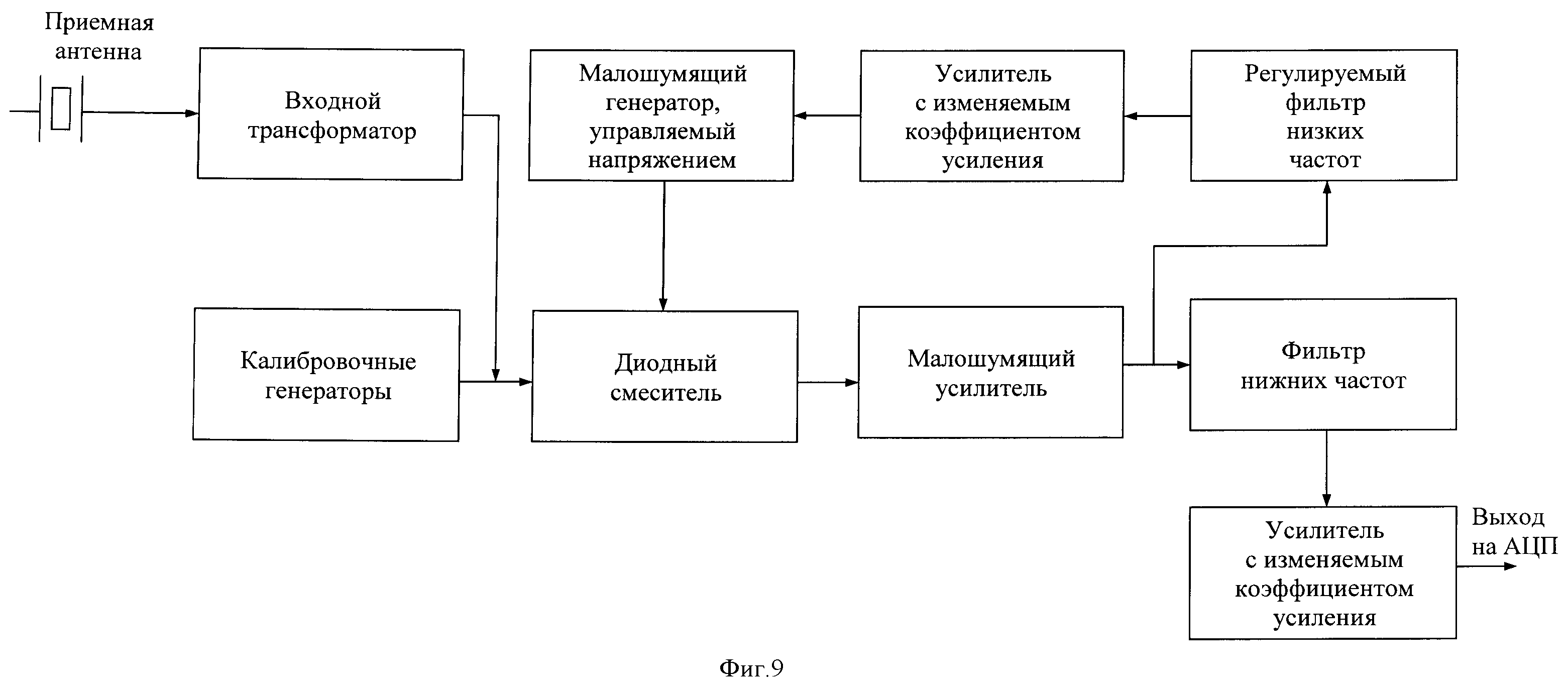
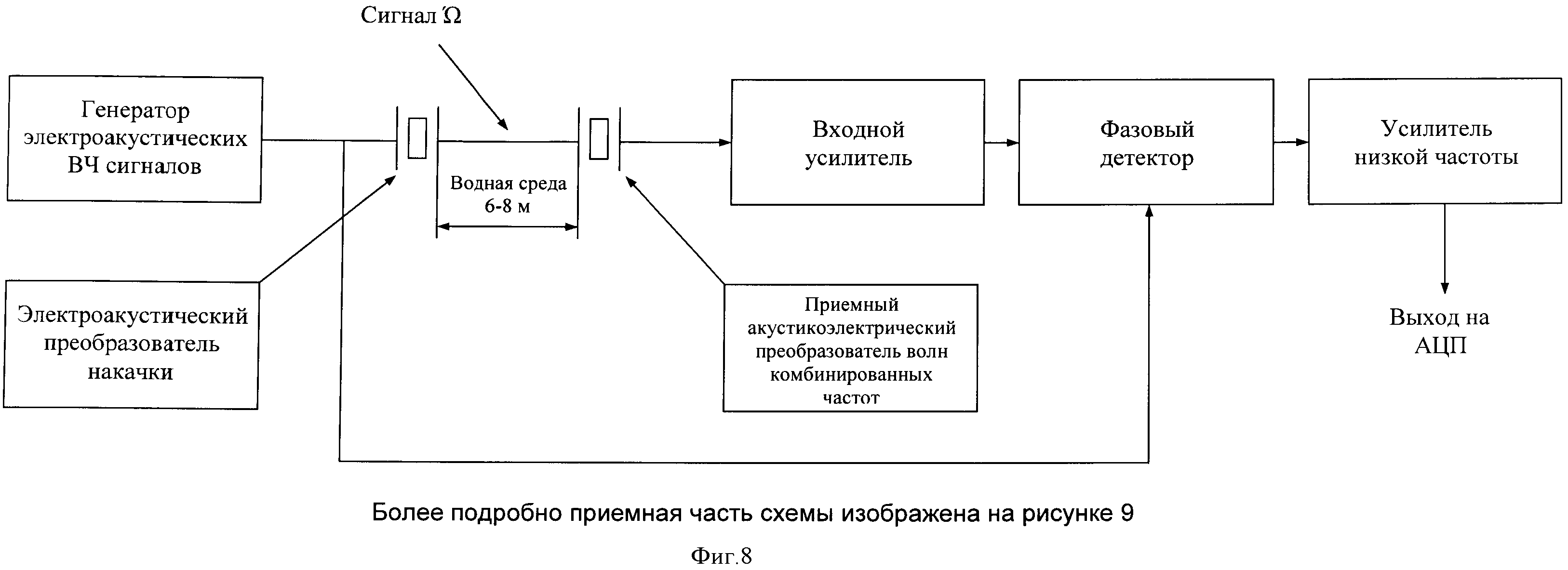
Изображенные на фигурах 8, 9 структурные схемы приемников имеют фазовую автоподстройку частоты. Применение такого типа параметрических приемников связано с возможными вибрациями преобразователей при движении подводных аппаратов. Т.к. модуляционный сигнал в этом случае является суммой акустической модуляции, вызванной нелинейностью воды, и вибрационной модуляции, в [11] советуют применять прием с фазовой автоподстройкой частоты. В таком случае схема, представленная на фигуре 10, работает как замкнутая следящая система с фазой сигнала в качестве регулируемой величины. Сигнал с гидрофона преобразуется по импедансу и подается на двойной балансный смеситель с очень большим динамическим диапазоном. Входной сигнал смесителя усиливается, проходит через фильтр нижних частот (ФНЧ) с целью получения управляющего напряжения для малошумящего генератора, который генерирует опорный сигнал несущей частоты для смесителя. Точность, с которой управляемый генератор отслеживает изменений фазы входного сигнала, является функцией усиления контура, а перестраиваемый ФНЧ позволяет легко менять ширину полосы контура. Испытания с кварцевым малошумящим генератором показали, что уровень шума приемника с фазовой автоподстройкой частоты составил 160 дБ относительно уровня несущей. Основным недостатком такого приемника является величина максимально достижимого отношения несущей к боковой полосе в 160 дБ. Если использовать структурную схему, предложенную в [11], то необходимо увеличение этого отношения на ≈20 дБ. Для решения этой проблемы требуется увеличить амплитуду частоты накачки в параметрическом излучателе до ≈5·106. Похожие величины опубликованы в [8], где приводятся значения 246 дБ/мкПа·м или ≈2·106 Па·м. Полученные числовые значения параметров и принятые автором при расчетах концепции нуждаются в экспериментальных подтверждениях.
1. Устройство «освещения» подводной обстановки в различных районах Мирового океана, использующее маневренные свойства автономного необитаемого подводного аппарата (АНПА), который является транспортировочным модулем, с размещенной на нем бортовой электронной аппаратурой (БЭА) различного назначения, в том числе с элементами искусственного интеллекта, отличающееся тем, что для решения поставленной задачи предлагаемое устройство обеспечивает облучение звуковой энергией заданного района водной среды, используя штатный излучающий тракт обычного гидролокатора, преобразующий свое ВЧ (специальным алгоритмом модулированное и возбужденное) гидроакустическое поле в низкочастотное в диапазоне частот от десятков Гц до единиц кГц (т.н. параметрический излучатель), что гарантирует практически полное отсутствии реверберационной помехи и позволяет, тем самым, обнаруживать признаки подводных объектов с помощью применения параметрических приемников, размещенных вдоль борта АНПА (на пилонах носовых и кормовых рулей) позволяющих выделять полученный эхо-сигнал на фоне низкочастотных шумов моря и использующих специальные алгоритмы обработки, позволяющих определять габариты, форму и материал подводного объекта (для преодоления обычно существующих неопределенностей об их физической природе) с целью принятия обоснованного решения на борту АНПА о типе и местоположении обнаруженных объектов без привлечения оператора - человека - на судне-носителе АНПА.
2. Устройство по п.1, отличающееся тем, что эволюции АНПА (в обеих плоскостях) синхронизированы с моментом излучения зондирующих импульсов и происходят только тогда, когда переходные процессы вынужденных колебаний АНПА после завершения эволюции затухнут, а прием поступающей из моря информации так же синхронизирован с целью обеспечения такой точности измерения времени между передним фронтом зондирующего импульса и передним фронтом эхо-сигнала и измерения угловых скоростей и ускорений, чтобы обеспечить необходимую степень точности в определении местоположения АНПА в момент обнаружения эхо-сигнала.
3. Устройство по п.1, отличающееся тем, что обнаружение и классификация искусственных подводных объектов диаметром от 0,3 до 10 м (их габариты и форму) может происходить на дистанциях до 5,0 км, а в интервале этих же дистанций возможно определение не только физических характеристик подводных объектов, но и их материала (в том числе донных отложений, ледяного покрова, пластиковых или резиновых оплеток подводных кабелей, бетонных конструкций и т.п.).
ЛИТЕРАТУРА
[1]. Дж.В.Стретт (лорд Рэлей). Теория звука. Т.2. Пер. с англ. М., Гостехиздат, 1955).
[2] Gaunaurd G.C, Werby М.F. Resonance response of submerged acoustically excited thick and thin shells // the jurnal of the acoustical society of America. 1985. V.77. №6. P.2084-2098.
[3] Brill D., Gaunaurd G.C., Uberall H. Sonar target-indification by means of acoustic spectroscopy scheme // Ocean-82.1982. №4. P.123-128.
[4] Скучик Е. Простые и сложные колебательные системы. - М.: Мир, 1971. 558 с.
[5] Урик Р. Дж. Основы гидроакустики. Пер. с англ. Л.: Судостроение, 1978. 448 с.
[6] Метсавеэр Я.А., Векслер Н.Д., Стулов А.С. Дифракция акустических импульсов на упругих телах. - М.: Наука, 1979. 239 с.
[7] Волощенко В.Ю., Максимов В.Н., Тимощенко В.И. Параметрическая акустическая система для классификации объектов лоцирования // Акустика и ультразвук, техника: Межвуз. сб. / Киев: Техника, 1986. Вып.21. с.63-65.
[8] Б.К.Новиков, О.В.Руденко, В.И.Тимошенко. Нелинейная гидроакустика. - Л.: Судостроение. 1981.
[9] Konrad W.L. Design and application of high power parametric sonars. - I.E.E.E. International Conference of Engineering in the Ocean Environmental, 1973, p.310-315.
[10] Патент США №3.716.823, МКИ G01S 9/66, приоритет от 15.12.60. «Полихроматическая гидроакустическая система классификации».
[11] Подводная акустика и обработка сигналов: Пер. с анл. / под редакцией Л.Бьерне. - М.: Мир, 1985 - 488 с., ил. «Вопросы обработки сигналов в нелинейной акустик». Т.Дж.МЮИР и Т.Дж.Голдсбери.
Applied Research Laboratories, The University of Texas at Austin, Austin, Texas 78712.
[12] Параметрические излучатели и приемники звука. RIW // 11. Физическая энциклопедия.
[13] В.С.Давыдов. Распознавание в гидролокации. Санкт-Петербург, 2005.
[14] Современные задачи подводной робототехники. Д.Г.Ляхов. Федеральное государственное бюджетное учреждение науки Института проблем морской технологии ДВ О РАН.
[15] Т.H.Куценко. Исследование параметрических антенн с многокомпонентным сигналом накачки. Диссертация. 2000 г. Таганрог.