СПОРТИВНЫЙ РОБОТ - ТРЕНАЖЕР С ПРОГРАММНЫМ УПРАВЛЕНИЕМ НА ПНЕВМАТИЧЕСКИХ ПРИВОДАХ
Вид РИД
Изобретение
Изобретение относится к области специальных спортивных автоматизированных устройств с программным управлением, в частности к робототехнике, используемой для тренировок по рукопашному бою и других боевых единоборств, применяющих ударную технику, а также для занятий по общей физической подготовке, развитию координации, скорости, маневренности, силы удара спортсмена с помощью механической конструкции с пневматическими приводами и программируемой системы управления.
Известен тренажер Печеркина для тренировки спортсменов, в котором боксерская подушка закреплена на стене, подвесное тело выполнено в виде металлического ядра и закреплено на нижнем конце гибкой подвески, при этом гибкая подвеска выполнена в виде цепи из двух соединенных между собой при помощи карабина частей с возможностью регулирования длины, а кронштейн установлен на стене выше боксерской подушки по ее центру. Кроме того, тренажер может быть снабжен набором подвесных тел, имеющих разную массу (Пат. №2289465 RU. Опубл. 20.12.2006).
Известен тренажер быстроты реакции боксера, включающий вертикальную штангу, перпендикулярно которой зафиксирована горизонтальная штанга, снабженная ударным элементом, приводной электродвигатель и механизм передачи движения ударному элементу, в котором ударный элемент размещен на конце горизонтальной штанги, вертикальная штанга установлена с возможностью вращения вокруг вертикальной оси, для чего она соосно скреплена с валом электродвигателя, установленного на раме под штангой, включенного в сеть через регулятор напряжения (Пат. №23780 RU. Опубл. 20.07.2002).
Известен боксерский тренажер, включающий опору, подвес, соединенный с опорой, и объект удара, соединенный с подвесом, в котором опора выполнена в виде согнутой штанги с узлом крепления к корпусу боксера (Пат. №44525 RU. Опубл. 27.03.2005).
Боксерский мешок для удара содержит основной мешок (2), закрепленный с помощью крюка (3) на потолке, и средний (6), прикрепленный к нижней части основного мешка (2) с помощью веревки. Масса среднего мешка составляет от 25% до 100% от массы основного мешка (Патент №0943360 ЕР. Опубл. 22.09.1999; Пат. №6,244,993 US. Опубл. 12.06.2001).
Известен спортивный тренажер для измерения динамических характеристик ударных и толчковых движений, который содержит стойку-скобу П-образной формы, на одной из ножек последней установлены, по меньшей мере, два источника светового излучения, а на другой столько же фотоприемников. При этом каждый из источников светового излучения оптически непосредственно связан только с одним из фотоприемников. Фотоприемники оборудованы электронными схемами, регистрирующими прерывание падения на них световых пучков, при прохождении между ножками стойки-скобы руки или ноги спортсмена, а моменты их прерывания регистрируются электронной схемой (Пат. №2212920 RU. Опубл. 27.09.2003).
Известен тренажер, содержащий блок-схему электронного боксерского тренажера, программно управляемый боксерский мешок с ударными подвижными конечностями, снабженный средством координатного подведения его к спортсмену по сигналам о координатах его местоположения на ринге, а также непрерывным контролем функционального состояния спортсмена по датчикам в боксерском мешке и психофизиологического состояния спортсмена по датчикам на его теле и экипировке в виде параметров частоты сердечных сокращений, кровяного давления, кожного сопротивления, температуры (Пат. №2201784 RU. Опубл. 10.04.2003).
Известно устройство управления автономным роботом, в котором все этапы обработки информации (прием данных от сервоприводов и датчиков, синтез моделей окружающих объектов по принятым данным, анализ синтезированных моделей, распознавание предметов, формирование и передача сигналов для управления сервоприводами и сенсорными матрицами) выполняются с высокой степенью распараллеливания. В устройстве применен способ программной обработки сцен, когда роль элементарных операндов выполняют целые двумерные и трехмерные изображения (Пат. №2424105 RU. Опубл. 10.06.2010).
Однако известное устройство относится к промышленным роботам и не предназначено для его использования в качестве спортивного тренажера - робота.
Известен тренажер (варианты), содержащий блочно-функциональные схемы построения двух вариантов многофункциональных электронных тренажеров, основанные на базе использования в качестве блока управления современного персонального компьютера со специально написанным программным обеспечением и комплекта датчиков на современной элементарной базе. Использован имитатор противника с программно-управляемыми движениями туловища, подвижных конечностей по сигналам датчиков, преобразуемых в цифровую форму, для формирования атакующих и защитных действий спортсмена с получением обратной связи в виде световой и речевой информации о допущенных ошибках. Введен генератор случайных чисел для управления блоком пространственных перемещений имитатора, введены ограничители пространственного перемещения спортсмена, снабженные датчиками и обратной связью для формирования правильной стойки, нанесения акцентированных ударов, совершенствования силы и точности ударов, развития реакции (Пат. №2201783 RU. Опубл. 10.04.2003).
Однако в известном тренажере отсутствует пневматическая система и механическая конструкция, способные наносить удары и совершать движения корпусом, имитируя спарринг, максимально приближенный к реальному.
В известных источниках информации отсутствует наиболее близкий аналог заявленному решению.
Задачей настоящего изобретения является адаптация тренажера к различным схемам тренировок, позволяющим развивать реакцию, нарабатывать мышечную память спортсмена, начинающего, в том числе, отрабатывать базовые движения и удары в динамике, приближенной к реальной ситуации, и имитировать реальный спарринг, кроме того, изменять усилия, направление ударов и скорость движения конструкции тренажера, приближая их к ритму спортсмена.
Поставленная задача решается тем, что в спортивном роботе- тренажере с программным управлением на пневматических приводах использована автоматизированная система управления, состоящая из компьютера, оснащенного программным обеспечением, которое загружается в контроллер управления, подающий сигналы на соленоиды пневматических распределителей, датчиков движения и позиционирования, опосредованно соединенная с механическими частями конструкции робота-тренажера, при этом система управления интегрирована в систему подачи воздуха, содержащую воздушный компрессор, воздушный фильтр, регулятор давления, датчик давления, пневматические распределители и исполнительный механизм робота, состоящий из механических манипуляторов конструкции тренажера, включающей плечевые и тазобедренные соединения, выполненные с возможностью осевого вращения.
Целесообразно, для расширения диапазона использования робота-тренажера, в качестве исполнительных двигателей использовать пневматические цилиндры, пневматические баллоны, пневматические подушки, пневматические мускулы, мембранные пневматические двигатели.
В качестве плечевых и тазобедренных соединений робота-тренажера целесообразно использовать поворотные механизмы с осевым приводом, соединенные с пневматическими двигателями, позволяющими использовать в программах тренировок боковые удары, а также для демпфирования (подавления колебаний) в момент удара, что позволит спортсмену применять блоки и отводящие движения.
Для осуществления различной скорости ударов в процессе тренировок целесообразно контроллер управления выполнить с возможностью изменения скорости срабатывания соленоидов пневматических распределителей, подающих воздух в пневматические цилиндры.
Для осуществления ударов различной силы в процессе тренировок целесообразно контроллер управления выполнить с возможностью использования различных последовательностей срабатывания соленоидов пневматических распределителей, подающих воздух в пневматические цилиндры.
Целесообразно, для изменения силы ударов в процессе тренировки, контроллер управления выполнить с возможностью изменения силы ударов тренажера посредством распределения воздуха на регуляторы давления, выполненные с различной пропускной способностью.
Целесообразно, для приближения имитации движений робота-тренажера к движениям человека, в конструкции тренажера использовать соотношения и пропорции размеров частей тела человека, а в движения манипуляторов заложить сходство с движениями тела человека.
Настоящее изобретение поясняют подробным описанием и схемами, на которых:
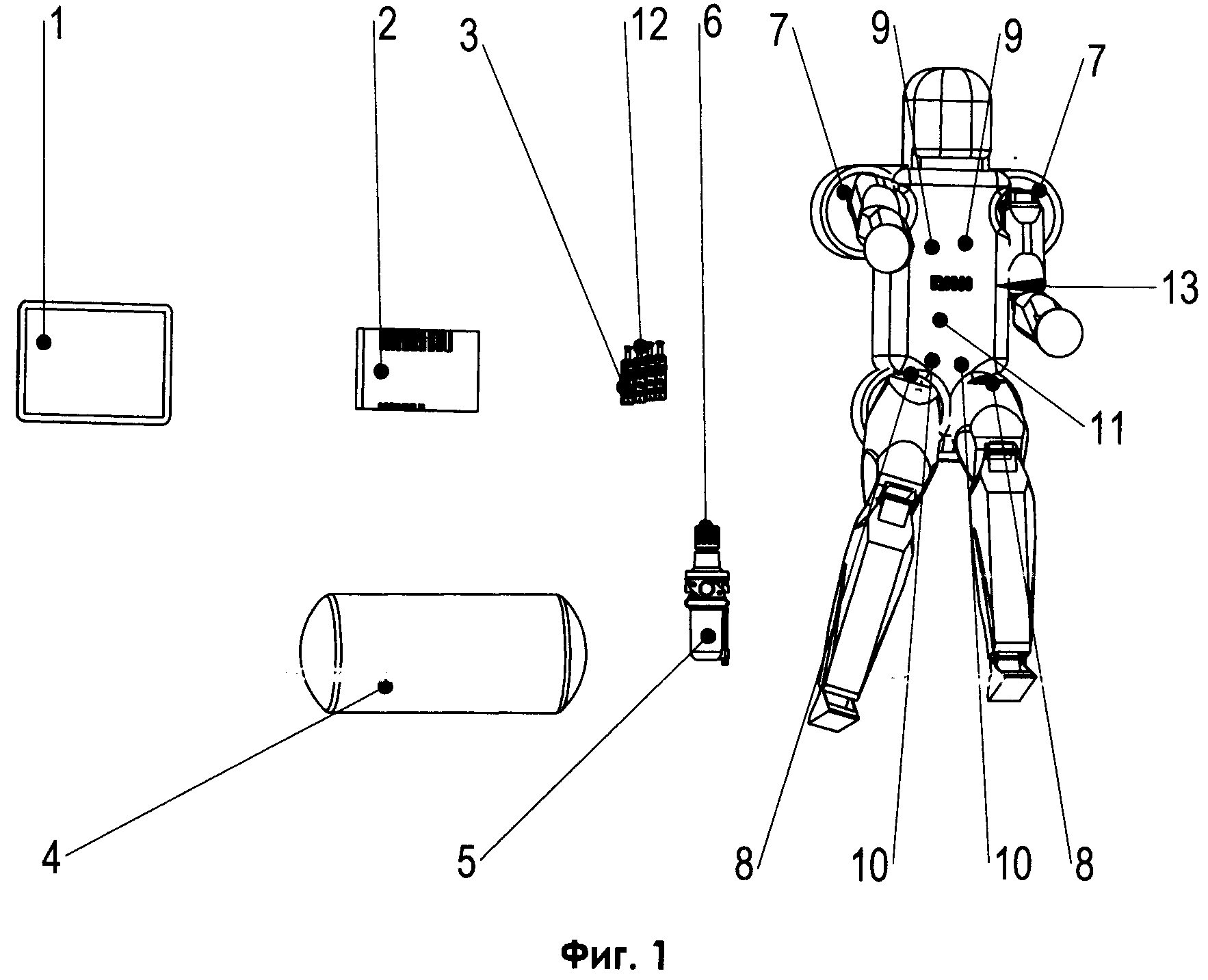
Фиг.1 характеризует функциональную схему спортивного робота-тренажера с программным управлением на пневматических приводах (далее робота-тренажера) согласно изобретению.
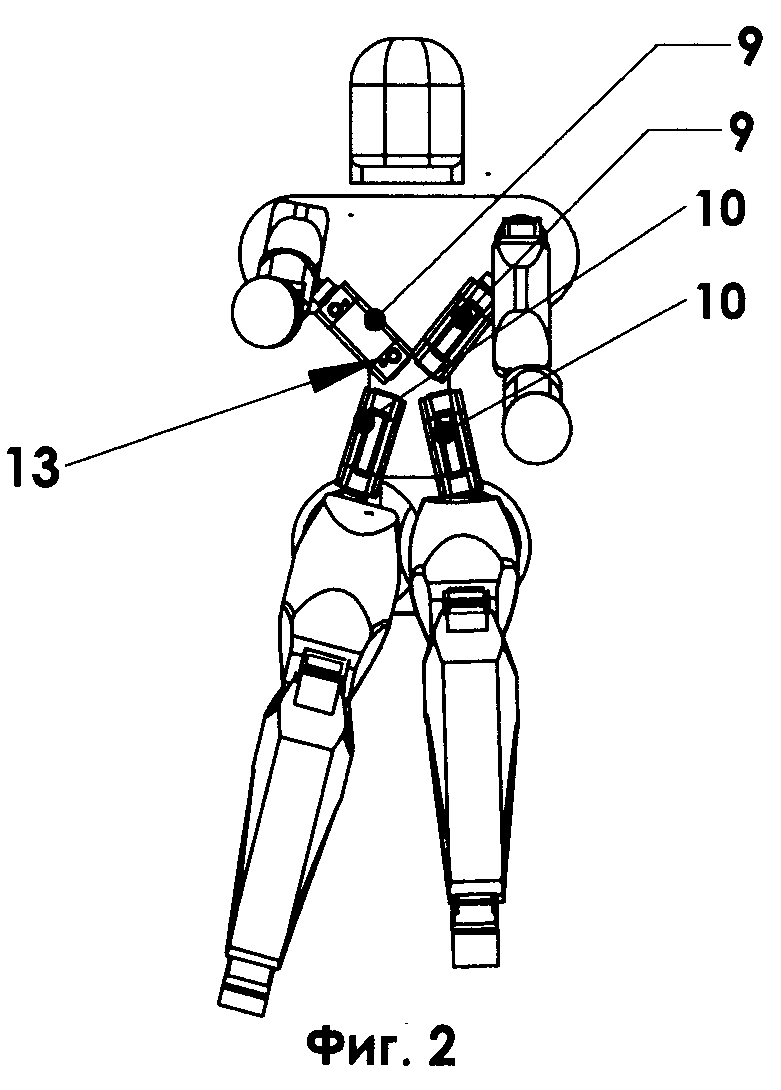
Фиг.2 иллюстрирует вид спереди схемы расположения пневматических двигателей в конструкции робота-тренажера.
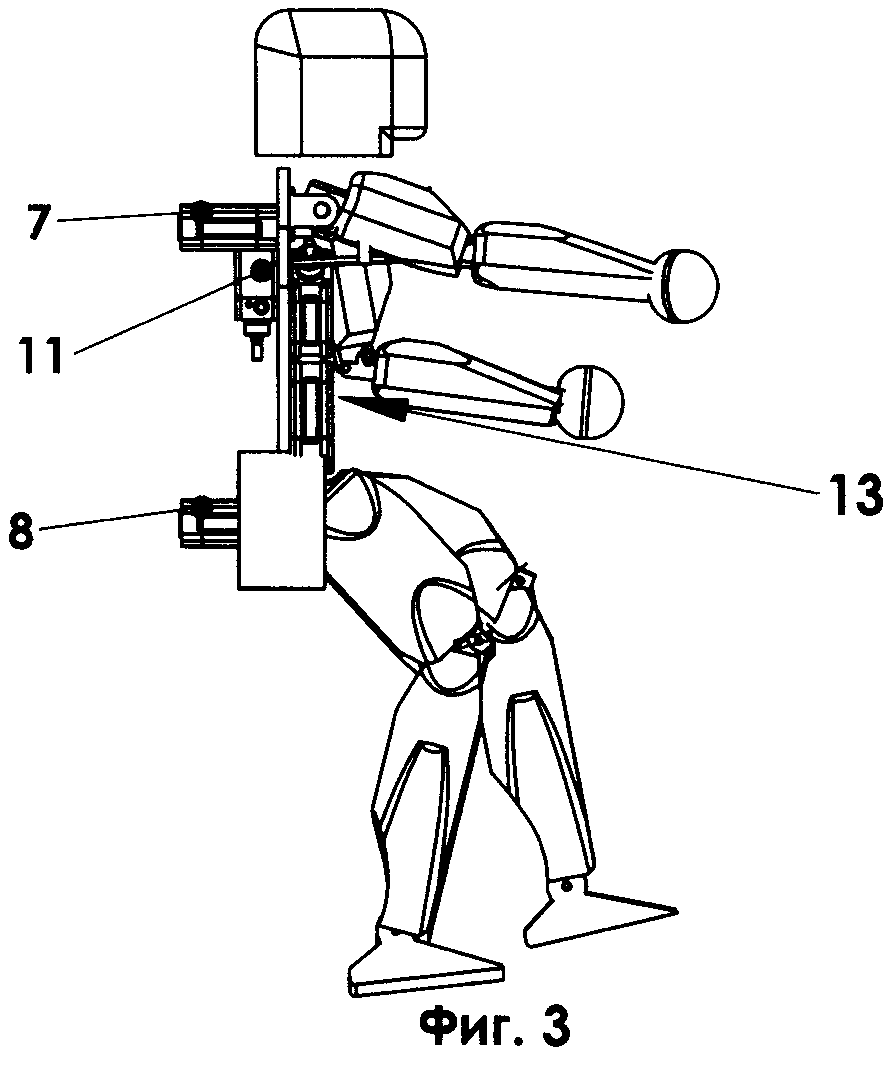
Фиг.3 иллюстрирует вид сбоку схемы расположения пневматических двигателей в конструкции робота тренажера.
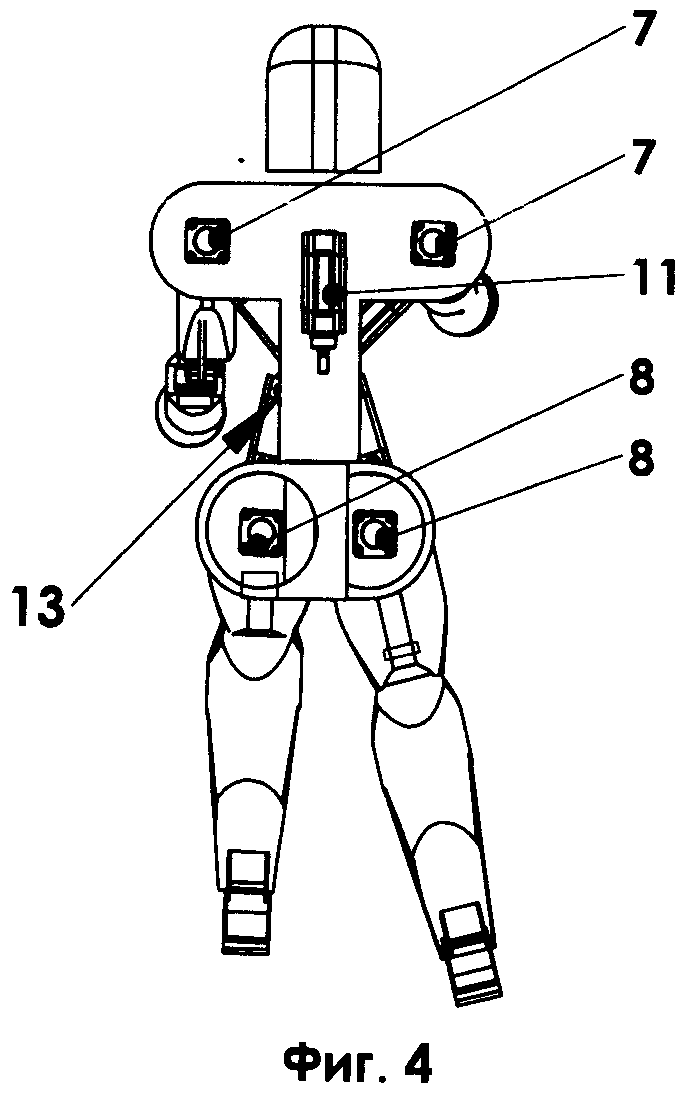
Фиг.4 иллюстрирует вид сзади схемы расположения пневматических двигателей в конструкции робота тренажера.
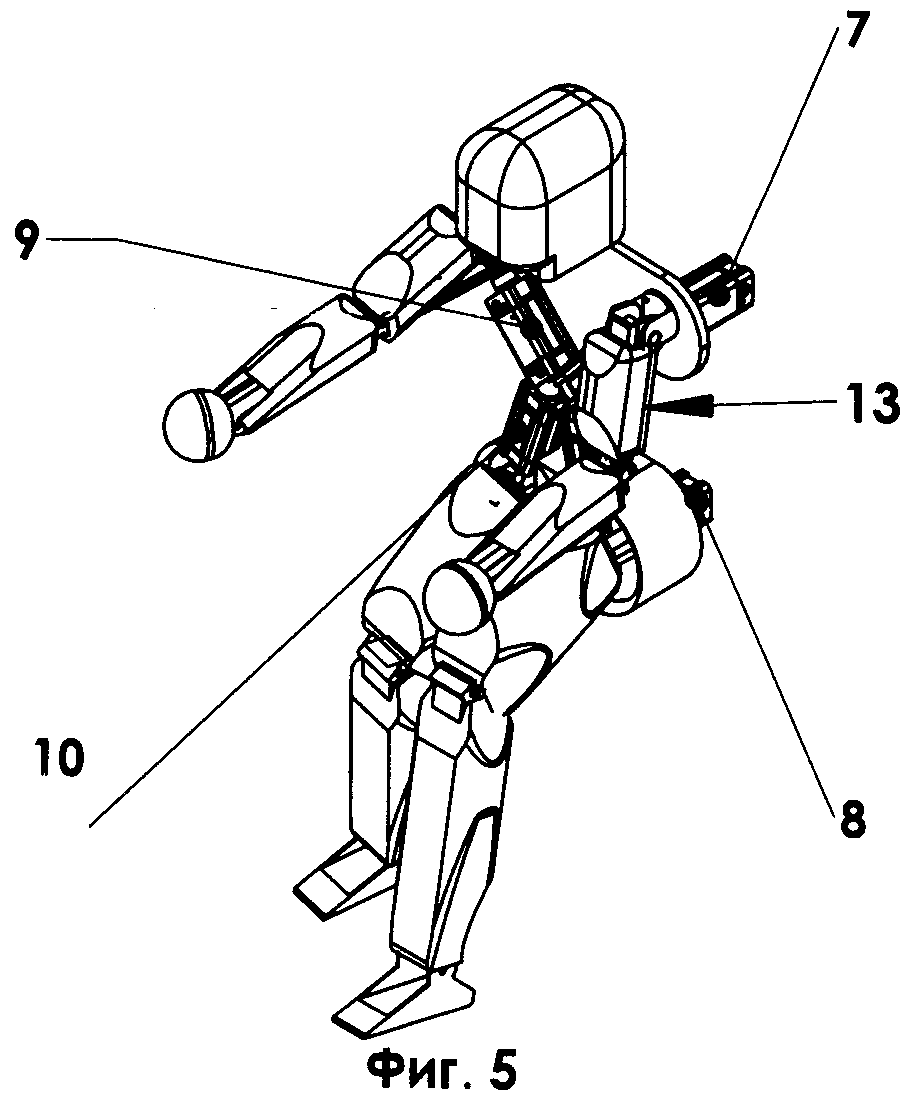
Фиг.5 иллюстрирует изометрию схемы расположения пневматических двигателей в конструкции робота-тренажера.
Спортивный робот тренажер содержит систему управления, которая состоит из компьютера 1, с установленным программным обеспечением, контроллера управления 2, соленоидов пневматических распределителей 12, пневматических распределителей 3 (Фиг.1). Система управления опосредованно соединена с элементами конструкции робота, состоящего из манипуляторов и непосредственно конструкции тренажера 13, включающей плечевые и тазобедренные соединения, выполненные с возможностью осевого вращения.
С компьютера 1 программа загружена в контроллер управления 2, который выполнен с возможностью преобразования программы в сигнал и направления его на соленоиды 12 пневматических распределителей 3. Пневматические распределители 3 соединены с воздушным компрессором 4, воздушным фильтром 5 и регуляторами давления 6. Регуляторы давления 6 имеют возможность подачи давления воздуха на пары пневматических двигателей верхних 7, нижних 8, поворотных верхних 9, поворотных нижних 10 и подъемного 11 посредством пневматических распределителей 3. Количество пневматических двигателей 7, 8, 9, 10, 11 определено в соответствии с необходимой функциональностью и комплектацией, не менее двух пневматических двигателей верхних 7, для использования только прямых ударов руками-манипуляторами. При этом каждый из пневматических двигателей 7, 8, 9, 10, 11 соединен с пневматическими распределителями 3.
Кроме того, в качестве исполнительных двигателей 7, 8, 9, 10, 11 манипуляторов использованы, соответственно, пневматические цилиндры, пневматические баллоны, пневматические подушки, пневматические мускулы, мембранные пневматические двигатели.
В конструкции плечевых и тазобедренных соединений использованы поворотные механизмы с осевым приводом, соединенные с поворотными пневматическими двигателями 9, 10.
Для осуществления роботом-тренажером 13 движений различной скорости контроллер управления 2 выполнен с возможностью изменения скорости подачи сигнала на соленоиды 12 пневматических распределителей 3.
Для осуществления роботом-тренажером движений различной силы контроллер управления 2 выполнен с возможностью изменения давления в пневматических двигателях 7, 8, 9, 10, 11 посредством подачи воздуха на регуляторы давления 6, выполненные с возможностью подачи различного давления.
Для приближения имитации движений элементов конструкции робота-тренажера 13 к движениям человека, в манипуляторах и конструкции тренажера использованы соотношения и пропорции размеров частей тела человека, а в движения манипуляторов заложено пропорциональное сходство с движениями частей тела человека.
Спортивный робот тренажер используется следующим образом.
Основная движущая сила - поток воздуха - подается через воздушный компрессор 4, который создает давление воздуха, необходимое для работы спортивного робота-тренажера, и направляет воздушный поток на пневматические распределители 3 через регуляторы давления 6 (Фиг.1). Пневматические распределители направляют воздушный поток на пневматические двигатели 7, 9 в верхней части конструкции 13 робота, два из которых 7, по одному на каждый манипулятор, двигают манипуляторы вперед, а два 9, по одному на каждый манипулятор, выполняют поворотные движения, и в пневматические двигатели 8, 10 в нижней части конструкции 13 робота, из которых пневматические двигатели 8, по одному на каждый манипулятор, двигают манипуляторы вперед, а пневматические двигатели 10, по одному на каждый манипулятор, выполняют поворотные движения, и один двигатель 11, по центру робота-тренажера поднимает тренажер в процессе тренировки, что имитирует прыжки.
Компьютер 1 загружает программу тренировки в контроллер управления 2, который преобразует программу в сигнал на соленоиды 12, открывающие клапаны пневматических распределителей 3.
Пневматические двигатели 7, 8, 9, 10, 11 преобразуют давление воздуха в механические движения частей конструкции 13 (конечностей, корпуса) робота-тренажера.
В конструкциях плечевых соединений используют поворотные механизмы с осевым приводом, которые соединяются с пневматическими двигателями 9 и 10.
В процессе тренировки контроллер управления 2 изменяет скорость срабатывания и последовательность срабатывания пневматических двигателей 7, 8, 9, 10, 11 посредством соленоидов 12 пневматических распределителей 3.
Для осуществления удара различной силы конструкцию 13 робота-тренажера выполняют с возможностью изменения давления в пневматических двигателях 7, 8, 9, 10, 11 посредством регуляторов давления 6.
Приближение имитации движений элементов конструкции (конечностей и туловища) 13 робота-тренажера к движениям человека используют в манипуляторах и конструкции 13 робота-тренажера соотношения и пропорции размеров частей тела человека, а в движения манипуляторов закладывают пропорциональное сходство с движениями частей тела человека.
Комплектация спортивного робота-тренажера напрямую зависит от требуемой функциональности. В качестве пневматических исполнительных двигателей 7, 8, 9, 10, 11 манипуляторов используют, соответственно, пневматические цилиндры, пневматические баллоны, пневматические подушки, пневматические мускулы, мембранные пневматические двигатели.
От количества пневматических двигателей 7, 8, 9, 10, 11 зависит расход и давление воздуха в системе.
Для большей функциональности спортивного робота-тренажера используют воздушный компрессор 4, работающий и с большим давлением до 15 бар. В такой комплектации недопустимо устанавливать стандартные пневматические двигатели 7, 8, 9, 10, 11, имеющие ограничение - 10 бар, и пневматические мускулы - 6-8 бар.
При комплектации спортивного робота-тренажера, не требующего постоянной большой нагрузки, используют воздушный компрессор 4 с давлением до 8 бар.
При использовании промышленных воздушных компрессоров устанавливают дополнительный регулятор давления (не показано) с максимальной пропускной способностью 8 бар.
В стандартной комплектации максимальное усилие составляет 113, 6 кг/с, а максимальная скорость достигает 6-8 м/с. Эти параметры значительно ниже, чем у спортсменов, но достаточны для реалистичности спарринга. Движения, которые выполняет спортивный робот-тренажер, показаны на фиг.3-6.
Предлагаемый робот-тренажер позволяет распределять усилия и адаптировать тренажер к различным схемам тренировок, позволяющим развивать реакцию, нарабатывать мышечную память спортсмена, начинающего в том числе, за счет ответной реакции тренажера на действия спортсмена.
Кроме того, позволяет отрабатывать базовые движения и удары в динамике, приближенной к реальной ситуации, имитируя движения человека и имитируя спарринг.
Предлагаемый спортивный робот-тренажер создает условия, за счет наличия пневматической системы, изменять усилия, направление ударов и скорость движения конструкции тренажера, приближая их к ритму конкретного спортсмена, что позволяет отрабатывать движения максимально эффективно и в доступные для ударов зоны.
Кроме того, спортивный робот-тренажер является удобным спарринг-партнером спортсмена в любое время по различным готовым вариантам программы спарринга, а также индивидуальной программе, в зависимости от изначальной подготовки или физического состояния спортсмена. При этом робот-тренажер имеет возможность адаптации в различные схемы тренировок с изменением усилий и скорости движения.