СПОСОБ ЛЕЧЕБНОЙ ГИМНАСТИКИ И УСТРОЙСТВО ДЛЯ ЛЕЧЕБНОЙ ГИМНАСТИКИ
Вид РИД
Изобретение
Изобретения относятся к области медицины, в том числе и спортивной, и могут быть использованы для восстановительного (реабилитационного) лечения пациентов с неврологическими нарушениями двигательной функции.
Одной из первых попыток моделировать ритмические рефлексы у ребенка с выраженным центральным нарушением двигательных функций было создание в 1954 году американским кинезитерапевтом Темпл Фей способа, суть которого заключалась в пассивном моделировании с помощью нескольких методистов стереотипа ходьбы (Гленн Доман. Что делать, если у вашего ребенка повреждение мозга. 2007, ISBN 9789984392363, с.37-38). Одновременно с пациентом работали три человека: один сгибал руки и ноги справа; другой разгибал их слева; третий поворачивал голову то вправо, то влево. Для работы со взрослым требовалось уже пять человек (один - для поворотов головы и по одному - на каждую конечность). Естественно, что организационные трудности, возникающие при работе по этому методу, весьма значительны.
Дальнейшим развитием теории и практики кинезитерапии явилось применение эластичных резиновых тяг, подвесок с блоками и грузами-противовесами, скользящих поверхностей для возможно более полной нейтрализации веса перемещаемого сегмента тела (В.Л.Найдин. Реабилитация нейрохирургических больных с двигательными нарушениями. М.: Медицина, 1972, с.216-217), что облегчает пациенту выполнение произвольных движений и приложения к этому движению небольшой силы. При мышечной силе, меньшей, чем вес сегмента, эти приемы являются возможными способами тренировки движений.
К недостаткам известных способов можно отнести трудоемкость для медицинского персонала, отсутствие автоматизации, и сложность оценки эффективности процесса.
Уровень техники в области устройств для лечебной гимнастики может быть охарактеризован наличием в них, как правило, каких-либо несущих конструкций (пространственных каркасов, рам, оснований, стоек) напольного, настенного или потолочного расположения с какими-либо противовесами телу пациента и исполнительными механизмами и узлами (элементами), типа подкладных - под пациента - гидро- или пневмооболочек с изменяемым во время процедуры наполнением и/или давлением в их полостях, как, например, по патенту (RU 2422123 С2, A61H 1/00, опубликовано 27.06.11).
Известен аппарат для плавания (Tzu-Pei Grace Chen, Yuichiro Kinoshita, Sidney Fels, Ashley Gadd и др. Swimming Across the Pacific: A Virtual Swimming Interface Proposal for SIGGRAPH 2004 Emerging Technology ~), состоящий из деревянной рамы (каркаса) с горизонтальными верхними и нижними балками, статические шнуры перекинуты через шкивы, прикрепленные к балке и закрепленные кордами с карабинами к подвесу по типу дельтапланерного для поддержания пользователя за плечи и бедра. Для каждой лодыжки, предусмотрены шнуры, перекинутые через шкивы, установленные на верхней балке, и через другую пару шкивов, размещенных на нижней балке. Шнуры снабжены мешками с песком, являющимися противовесами для ног пловца. Данный аппарат предназначен для виртуального плавания, в таком аппарате уравновешивание частей тела осуществляется противовесами.
Устройство малоадаптивно к разнообразию условий применения, так как каждому клиенту необходимо подбирать противовесы и приводить систему «клиент-устройство» в рабочее положение, а для приведения конечности в движение необходимо прикладывать вдвое большую силу для преодоления состояния покоя двойной массы. Данная конструкция изначально существенно ограничена в стимуляции различных частей тела, так как в ней тело человека может поворачиваться только вокруг своей оси, а ноги могут выполнять движения только в вертикальной плоскости и только активно, потому что отсутствует привод.
Прототипами заявляемых способа и устройства являются изобретения «Способ и устройство биомеханической стимуляции мышц и восстановления двигательных функций» (RU 2184517 C2, A61H 1/00, опубликовано 10.07.2002); в части способа изобретение характеризуется тем, что тело пациента, то есть голову, туловище, конечности и пальцы пациента, устанавливают в начальное положение и задают принудительное движение этих частей тела по программе-методике лечебной физкультуры, предварительно определяют индивидуальные: для пациента предельно допустимые значения параметров физиологического состояния: частоту сердечных сокращений, частоту дыхания, кровяное давление, температуру тела, затем одновременно с проведением принудительных движений частей тела постоянно осуществляют измерение этих параметров, определяют разности между измеренными величинами и соответствующими допустимыми значениями, анализируют эти разности и на основе анализа формируют сигналы управления типа «усилить», «ослабить» и/или «прекратить сеанс», а в части устройства изобретение-прототип характеризуется тем, что содержит установленные на основании привод и исполнительные устройства, устройство управления приводом, соединенное с последним, процессор, выходом взаимосвязанный с приводом через датчики физиологического состояния пациента, а также источник электро- и пневмопитания и систему электропневмоклапанов. Исполнительные устройства привода выполнены в виде блоков надувных камер, связанных посредством системы электропневмоклапанов с источником электро- и пневмопитания, взаимосвязанным, соответственно, с устройством управления приводом, на вход процессора, при этом подключены дополнительно датчики реальных законов движения (тела пациента, видимо) и датчики физиологического состояния.
Известные способы, в том числе и способ-прототип, обладают недостатками, свойственными всем пассивным механотерапиям, главным из которых является недостаточный учет собственной активности больного. На основании перечисленных параметров физиологического состояния, можно достаточно объективно судить о состоянии пациента, его психологическом комфорте, но не об эффективности реабилитационного процесса.
К недостаткам и/или несовершенству известных устройств, в том числе прототипа, следует отнести недостаточные функциональные возможности и адаптивность к особенностям тел, высокую энергозатратность, то есть недостаточно высокие потребительские свойства.
Задачей изобретения в части способа является расширение его функциональных возможностей, повышение мотивации и эффективности восстановления двигательных функций пациента при исходном минимальном уровне, или полном отсутствии его физической активности.
Задачей изобретения в части устройства является расширение функциональных возможностей, повышение адаптивности к особенностям тел (рост, вес, конституция и т.п.), повышение надежности, экономичности и безопасности эксплуатации, иначе - повышение потребительских свойств объекта.
Задача изобретения-способа решена тем, что способ лечебной гимнастики, при сеансе которой размещают пациента в исходном лежачем положении, задают и осуществляют всем частям его тела посредством исполнительных механизмов программные, по методике, движения, контролируют при этом, параметры психофизиологического состояния, то есть программные движения выполняют при мониторинге этих параметров, и вырабатывают управляющие программными движениями сигналы или для усиления, или для ослабления, или для прекращения сеанса, пациента после размещения в исходное лежачее положение поднимают и поддерживают на весу в состоянии безразличного равновесия для создания возможности осуществления с минимальными энергозатратами сложносоставных, взаимосвязанных, ритмичных программных движений всем частям его тела, поддержание пациента на весу осуществляют посредством подвесов, распределенных по частям тела, с программируемыми исполнительными механизмами, действующими параллельно и независимо один от другого, с комбинированным электро- и пневмоприводом каждый, измеряют и фиксируют фактические параметры программных движений и энергопотребление приводов исполнительных механизмов при реализации программных движений в процессе каждого сеанса, об эффективности которого судят по динамике энергопотребления, причем при возникновении и/или наличии физической активности пациента во время сеанса, о чем судят по снижению энергопотребления конкретного привода конкретного исполнительного механизма, параметры программных движений корректируют, для мотивации пациента к процессу лечебной гимнастики используют виртуальную игровую среду, которую формируют с помощью персонального компьютера и создают возможность пациенту управлять персонажем виртуальной среды, а все параметры программных движений, полученные во время сеанса, сохраняют для анализа эффективности сеанса и сопоставления их с данными других сеансов лечебной гимнастики.
Задача изобретения-устройства решена тем, что в устройстве для лечебной гимнастики, содержащем основание с размещенными на нем исполнительными механизмами, приспособления для крепления частей тела пациента на исполнительных механизмах, датчики состояния исполнительных механизмов, блок контроля и управления, персональный компьютер с управляющей программой, соединенный выходами, через блок управления, с исполнительными механизмами, а входами с датчиками состояния исполнительных механизмов, источник электропитания и источник сжатого воздуха, основание выполнено в виде двух продольных параллельных направляющих с элементами крепления их на жесткой неподвижной основе над пациентом, на этих направляющих подвижно размещены перекладины, на каждой из перекладин размещены исполнительные механизмы, выполненные, каждый, в виде сборки, содержащей пневмоцилиндр с поршнем, электродвигатель с энкодером (датчиком угла поворота) и шкивом на выходном валу, исполнительное звено в виде, например, полимерной мононити или гибкого нерастяжимого шнура с гладким полимерным покрытием, причем это звено пропущено через торцовый сальник пневмоцилиндра и концом соединено с поршнем, средней частью расположено в канавке шкива электродвигателя, а второй конец исполнительного звена предназначен для соединения с элементом-подвесом, поддерживающим часть тела пациента, блок контроля и управления каждого исполнительного механизма состоит из контроллера, датчика тока, датчика давления, энкодера и электроуправляемого пневмораспределителя, рабочая полость каждого пневмоцилиндра сообщена с датчиком давления и через электроуправляемый пневмораспределитель с источником сжатого воздуха, выходы всех датчиков блока контроля и управления соединены с входом контроллера, один выход которого соединен через датчик тока с электродвигателем, а второй выход соединен с электроуправляемым пневмораспределителем; дополнительно - каждый пневмоцилиндр может быть снабжен ресивером, полость которого сообщена с рабочей полостью пневмоцилиндра посредством отверстия в стенке последнего.
Необнаружение в общедоступных источниках информации, в том числе и в патентных, технических решений с той же (или эквивалентной) совокупностью существенных, в том числе отличительных, признаков и с теми же свойствами, характеризует заявленные способ и устройство как новые и не очевидные, что при несомненном обеспечении требуемых результатов позволяет утверждать о соответствии объектов критериям «изобретения».
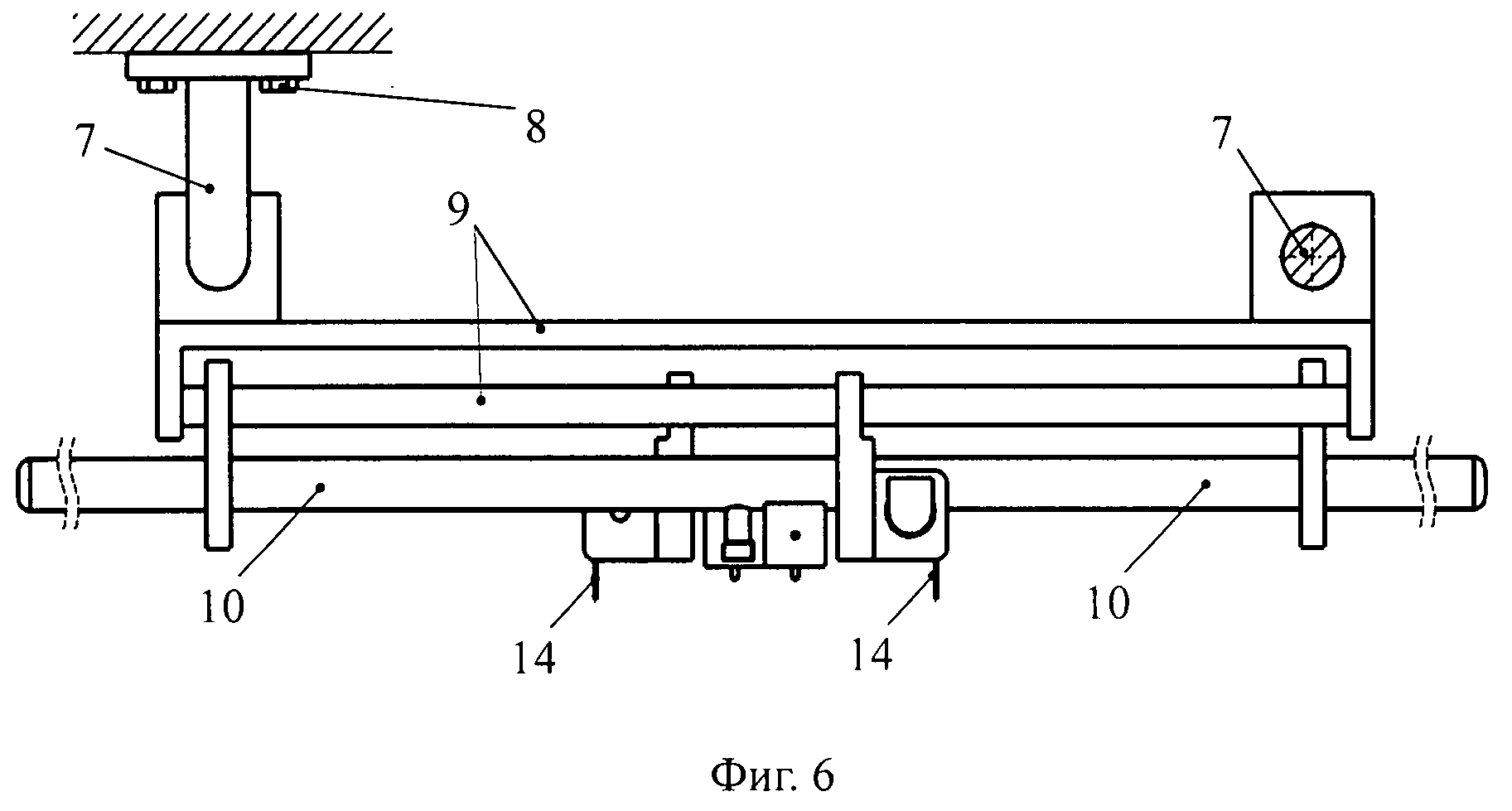
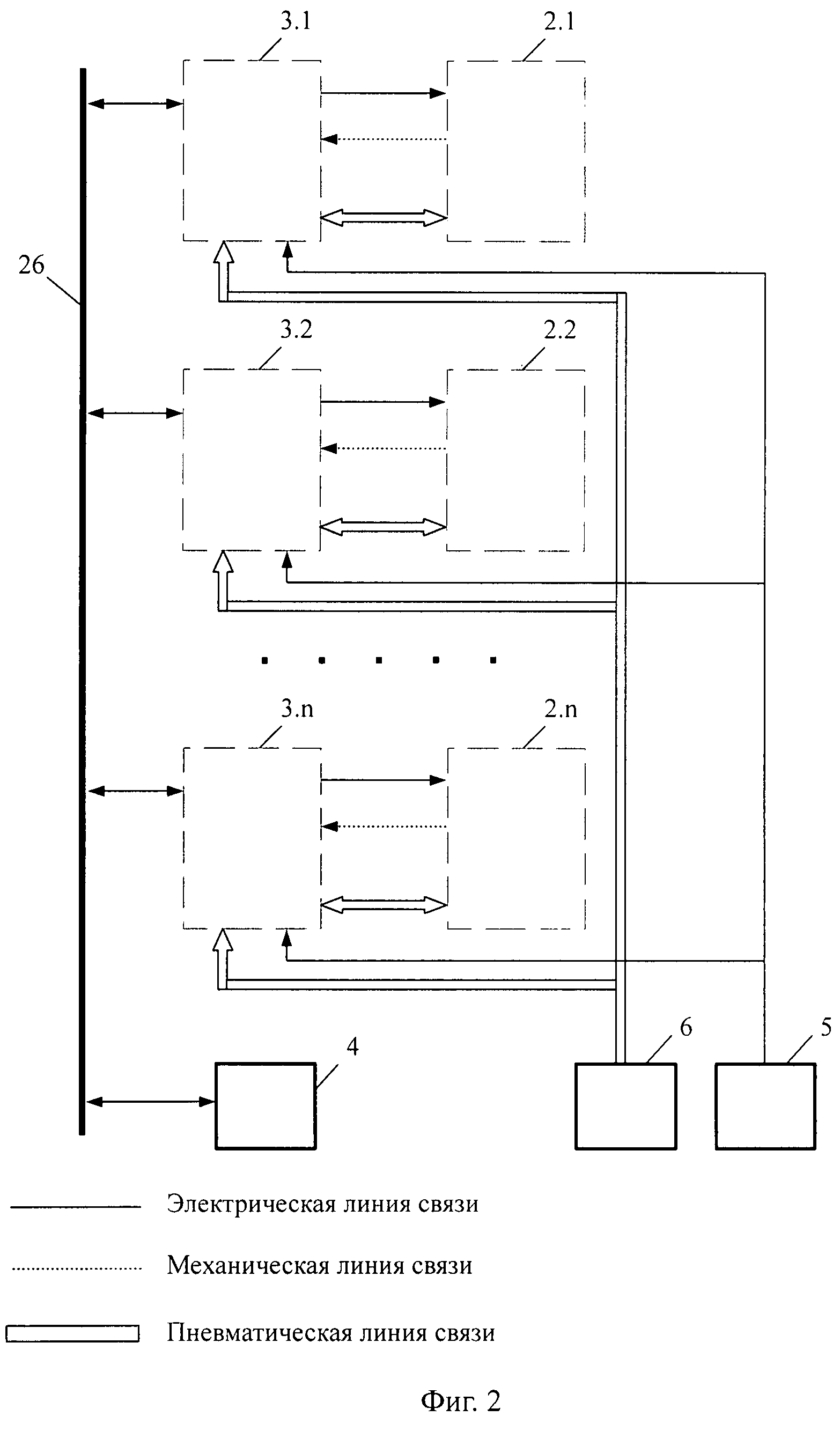
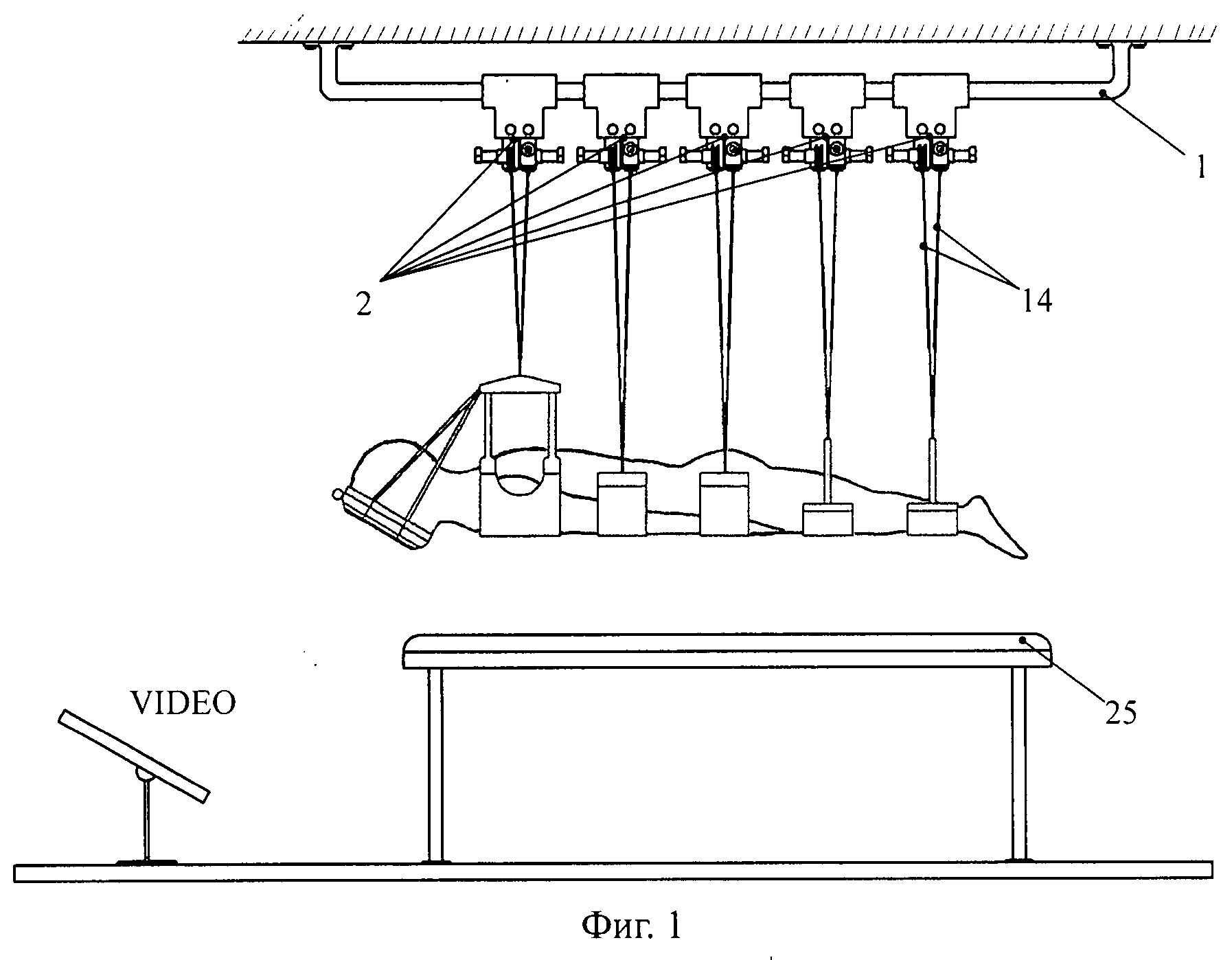
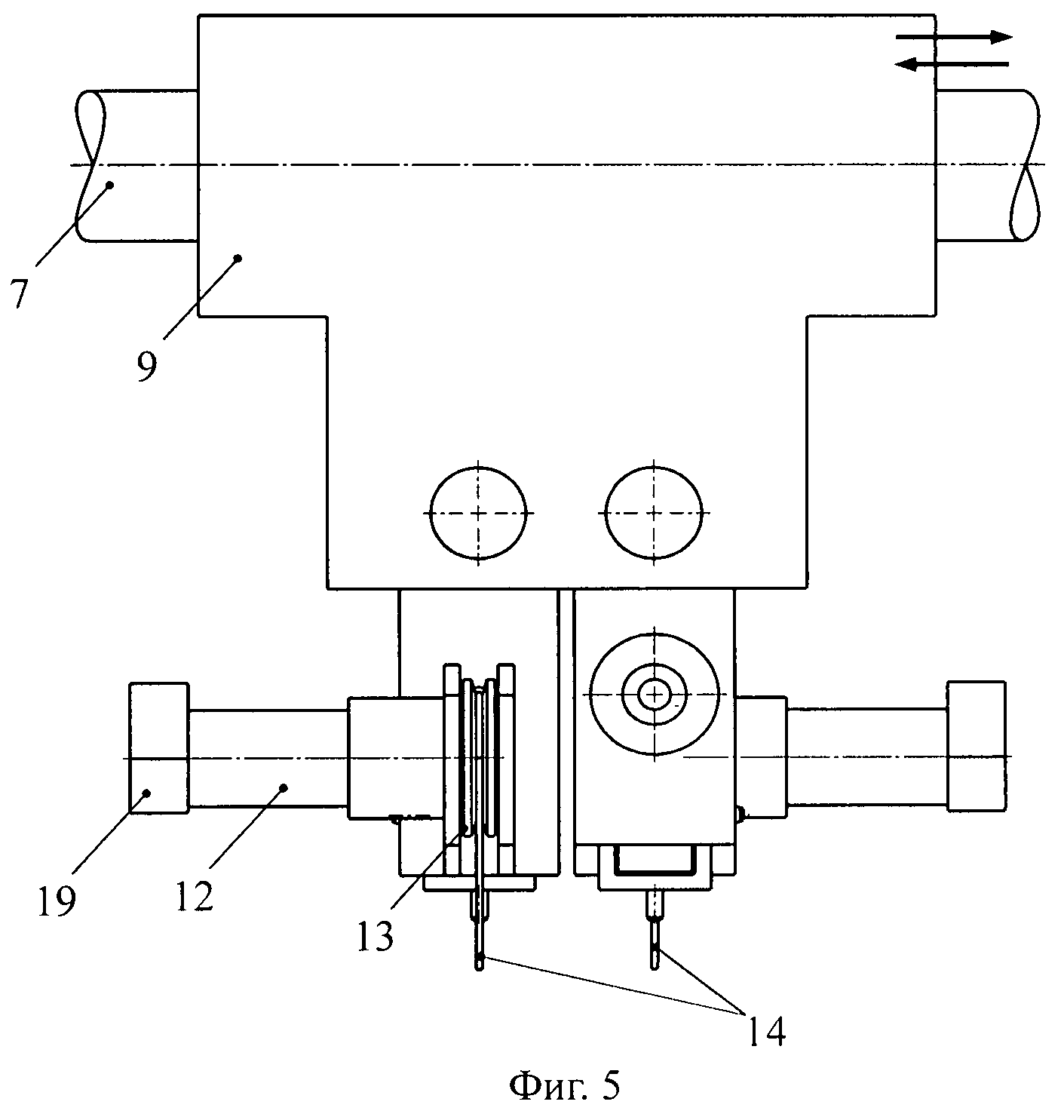
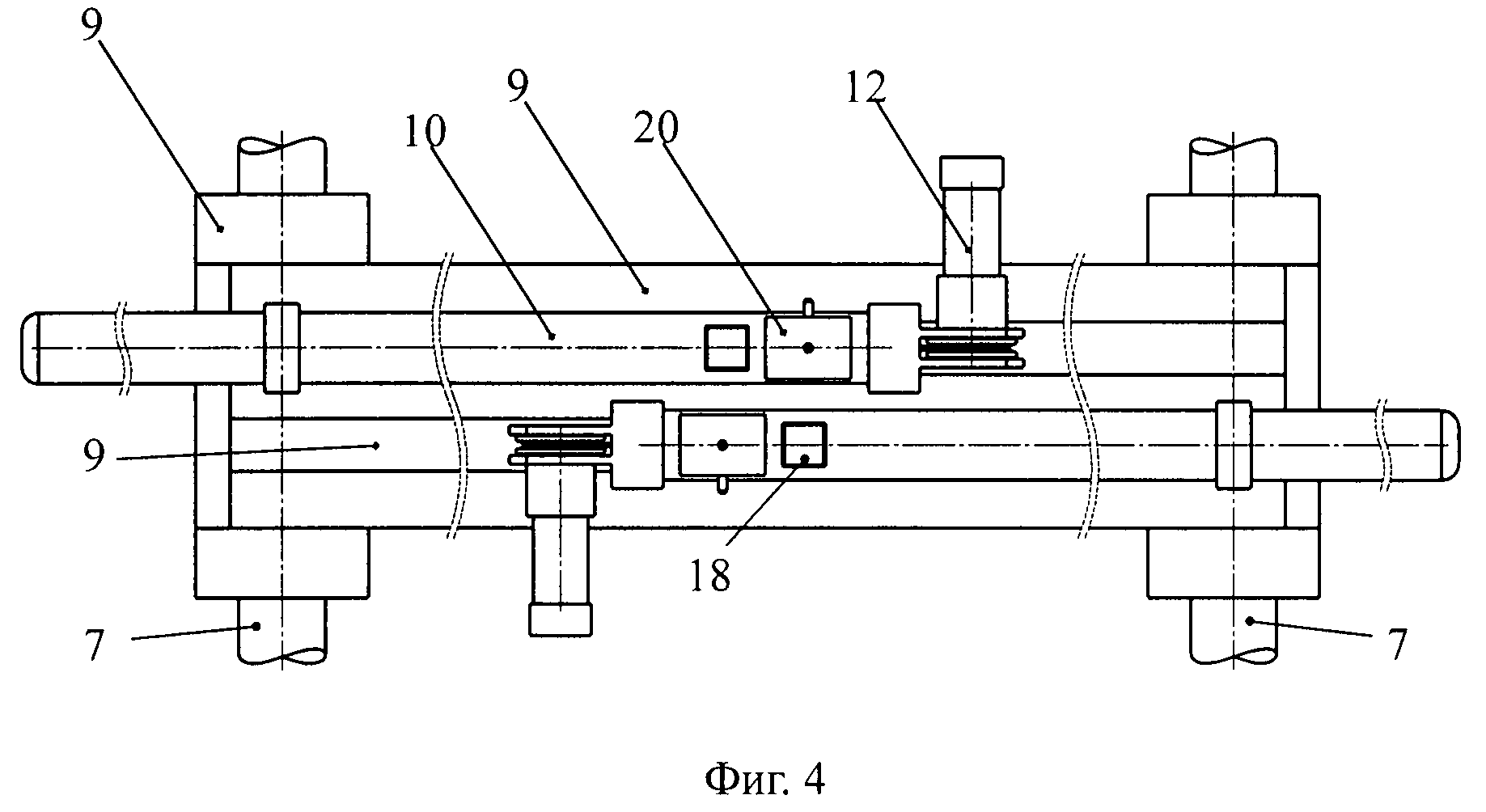
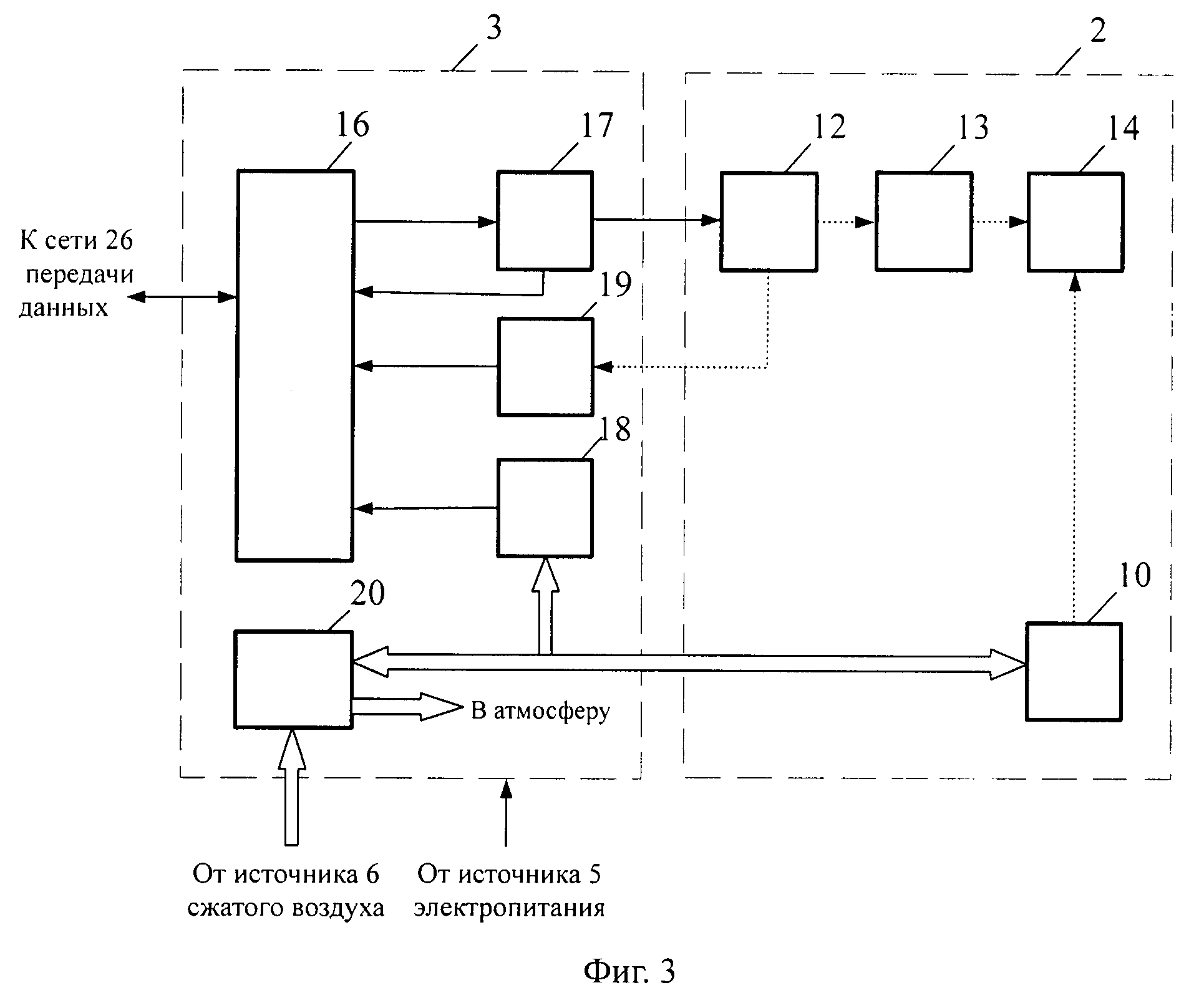
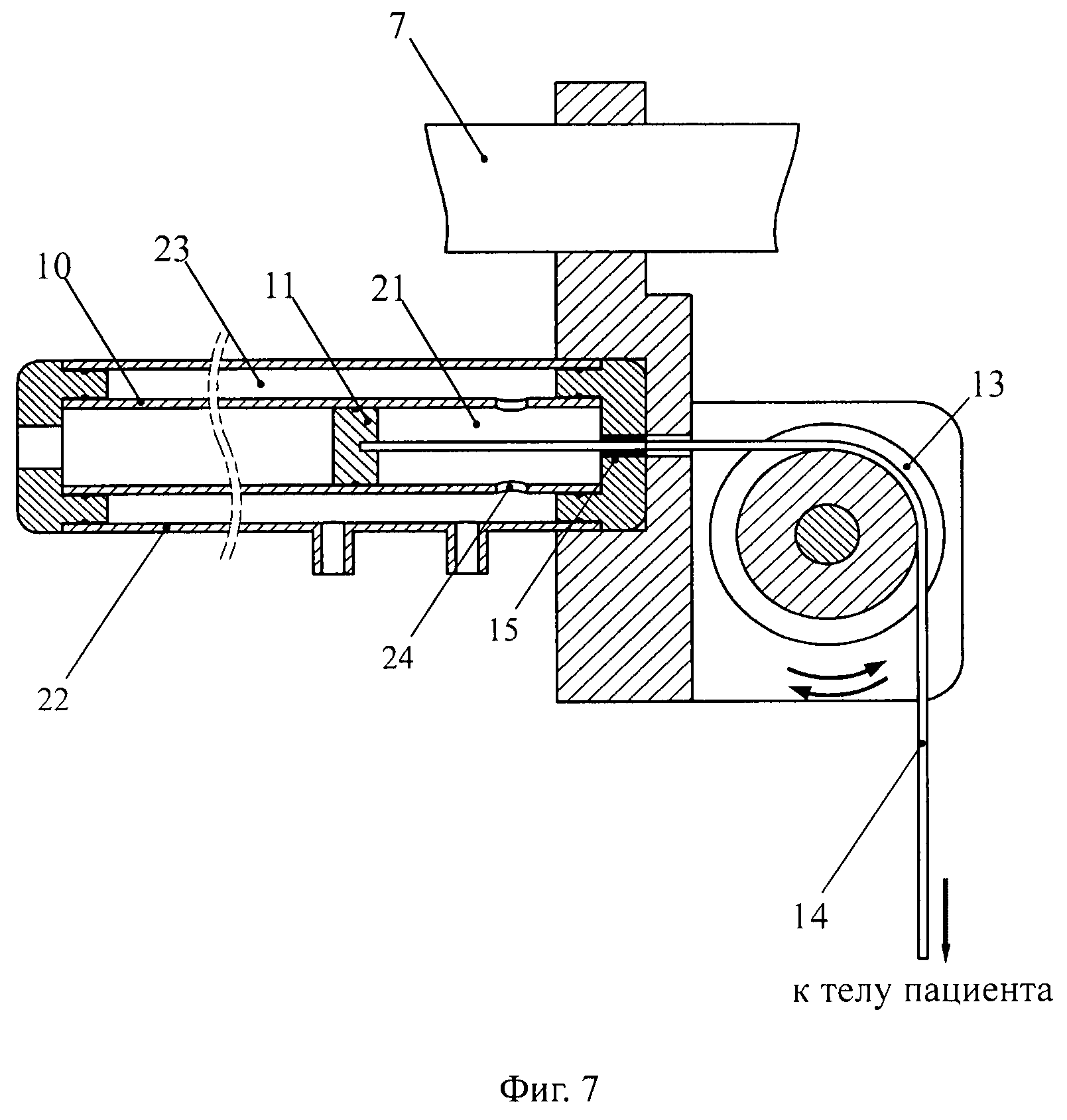
Конструктивное исполнение устройства поясняется графическими материалами, где: на фигуре 1 приведен общий вид устройства; на фигуре 2 приведена блок-схема устройства; на фигуре 3 приведена блок-схема одного из исполнительных механизмов с блоком контроля и управления; на фигуре 4 приведены перекладина с двумя исполнительными механизмами и датчиками состояния (вид снизу); на фигуре 5 приведены перекладина с двумя исполнительными механизмами и датчиками состояния (вид сбоку); на фигуре 6 приведены перекладина с двумя исполнительными механизмами и датчиками состояния (вид спереди); на фигуре 7 приведен фрагмент исполнительного механизма (разрез по диаметральной вертикальной плоскости пневмоцилиндра).
Устройство для лечебной гимнастики, состоит (см. фиг.1-7) из основания 1, выполненного в виде двух продольных параллельных направляющих 7 с элементами 8 крепления направляющих, для закрепления их, например, на потолочной плите, на которых подвижно размещены перекладины 9 в количестве, например, пяти штук, то есть соответственно зонам тела пациента, требующим поддержания их на весу. На каждой из подвижных перекладин 9 попарно и подвижно размещены исполнительные механизмы 2. Каждый из исполнительных механизмов 2 служит для поддержания пациента на весу и манипулирования какой-либо одной конкретной частью его тела и выполнен в виде пневмоцилиндра 10 с исполнительным звеном 14, снабжен электродвигателем 12 со шкивом 13 на выходном валу. Электродвигатель 12 может быть снабжен редуктором (как изображено на фиг.4-6). Исполнительное звено 14 исполнительного механизма 2 выполнено в виде гибкого нерастяжимого шнура с гладким полимерным покрытием (или в виде толстой полимерной мононити) и одним концом соединено с поршнем 11 пневмоцилиндра 10, пропущен через торцевой сальник 15 пневмоцилиндра 10, средней частью расположено в канавке шкива 13, а другой конец этого звена соединен с поддерживающим тело пациента элементом-подвесом (на фигуре 1 элементы-подвесы изображены, но отдельными позициями не обозначены). Блок 3 контроля и управления каждого исполнительного механизма 2, состоит из контроллера 16, датчика 18 давления, пневматически соединенного с рабочей полостью 21 пневмоцилиндра 10, энкодера 19 (датчика угла поворота), установленного на валу электродвигателя, датчика 17 тока на линии питания электродвигателя и электроуправляемого пневмораспределителя 20. Рабочая полость 21 каждого пневмоцилиндра 10 сообщена через электроуправляемый (нормально закрытый трехпозиционный) пневмораспределитель 20 с источником 6 сжатого воздуха. Выходы всех датчиков блока 3 контроля и управления электрически соединены с контроллером 16. Каждый контроллер 16 каждого блока 3 контроля и управления (см. фиг.2 и 3, позиции 3.1-3.n), через сеть 26 передачи данных соединен с персональным компьютером 4 с соответствующим программным обеспечением. Каждый пневмоцилиндр 10 каждого исполнительного механизма (позиции 2.1-2.n на фиг.2) может быть снабжен, дополнительно, ресивером 22 в виде кожуха (см. фиг.7) с образованием между ним и пневмоцилиндром 10 полости 23, при этом полость 23 ресивера 22 сообщена с рабочей полостью 21 пневмоцилиндра 10 отверстием 24 в стенке пневмоцилиндра. Устройство также снабжено датчиком положения тела пациента для управления персонажем в виртуальной среде; в качестве датчика положения тела можно использовать, например, общеизвестный датчик-акселерометр. Для исходного размещения пациента под устройством располагается ложемент 25 с мягким сменяемым покрытием.
Устройство для лечебной гимнастики реализует заявленный способ следующим образом: пациенту придают лежачее положение, на животе или на спине, на ложементе 25, на котором предварительно разложены элементы-подвесы (в виде, например, манжет с застежкой-липучкой и кольцом для карабина-защелки исполнительного звена 14), которые закрепляют на теле пациента соответственно зонам, требующим поддержания. Передвигая перекладины 9 по продольным направляющим 7 и исполнительные механизмы 2 по перекладинам 9 настраивают расстояния между исполнительными механизмами так, чтобы взаиморасположение исполнительных механизмов соответствовало антропометрическим данным пациента. Персональный компьютер 4 с программным обеспечением, через сеть 26 передачи данных, управляет электроуправляемыми пневмораспределителями 20 и посредством каждого контроллера 16 каждого блока 3.1-3.n контроля и управления дозирует подачу воздуха в каждый из пневмоцилиндров так, чтобы привести систему «устройство-пациент» в рабочее положение, то есть поднимает на заданную высоту и поддерживает пациента на весу над ложементом в состоянии практически безразличного равновесия. При этом контролируют: а) распределение давления в пневмоцилиндрах 10 посредством датчиков 18 давления, б) высоты, на которые исполнительные механизмы поднимают по программе каждую часть тела пациента посредством датчиков-энкодеров 19. После поднятия пациента, то есть после приведения системы «устройство-пациент» в равновесное положение, она приобретает следующие свойства: при механических отклонениях система мягко стремится в исходное срединное положение, каждое исполнительное звено 14 и соответственно элемент-подвес легко подвижны в вертикальной и горизонтальной плоскости, для приведения в движение отдельных частей тела или всего тела требуется незначительное усилие, так как перемещение поршня 11 в пневмоцилиндре 10 с ресивером 22 и, соответственно, элемента-подвеса на некоторое расстояние по вертикали влечет за собой лишь незначительное изменение давления, причем усилия для перемещения поршня от срединного положения как вниз, так и вверх практически одинаковы. Например перемещение поршня на 10 см, с подвешенным на исполнительном звене 14 грузом массой 10 кг в действующей модели приведет к изменению давления в пневмоцилиндре на 0,027 кг/см2, а усилие, необходимое для удержания груза в этом отклоненном положении, примерно 1 Н. Затем шкивы 13 электродвигателей 12 по командам контроллеров 16 совершают возвратно-вращательные (см. стрелки на фиг.7) движения в соответствии с программой, в которой заданы амплитуда угловых колебаний, их частота и - для разных частей тела - фаза движения, причем движения каждого шкива и, соответственно, элемента-подвеса могут выполняться по гармоническому закону (по синусоиде); например: движение начинается с части тела голова-грудь в нижнем направлении, затем через определенный промежуток времени в том же направлении начинает движение часть тела таз, еще через определенный промежуток времени части тела бедра и далее голень. После этого, дойдя до нижней точки движения, все части тела в том же порядке начинают движение вверх, а так как частота движения всех частей тела одинакова, то сохраняется разность фаз движений между частями тела и все тело совершает колебательные движения по заданной траектории волнообразно, имитируя, например, движение дельфина. При этом можно регулировать в процессе работы амплитуду и фазу отдельно для каждой части тела, а также общую частоту колебательного движения для всех частей тела. Реализация программных движений с определенными параметрами предусматривает возможность совершения движения совместно, то есть «в унисон», самим пациентом и электродвигателями исполнительных механизмов, причем параметры движения будут зависеть как от силы тока, поданного на электродвигатели, так и от силы, приложенной самим пациентом, при этом силу тока в процессе сеанса регулируют в ту или иную сторону по необходимости.
Персональный компьютер управляет также и виртуальной игровой средой, которую передает на экран монитора, установленный так, чтобы пациенту было удобно смотреть на экран. Пациент управляет персонажем в виртуальной игровой среде посредством датчиков положения, которые отслеживают движения пациента и передают информацию в персональный компьютер; таким образом пациент управляет персонажем в двух проекциях вверх-вниз и вправо-влево. Движения нижних конечностей пациента отслеживают с помощью датчиков-энкодеров, и количественные значения параметров движения нижних конечностей, такие как амплитуда и частота, передают в персональный компьютер, а персональный компьютер на основании этих данных формирует управление скоростью персонажа виртуальной игровой среды, то есть пациент способен сообщать персонажу движение вперед, причем с различной скоростью, которая находится в прямой корреляции от количественного показателя амплитуды и/или частоты движения ног. При жестко заданных параметрах движения, таких как амплитуда и частота, скорость персонажа в виртуальной среде может зависеть от степени физической активности пациента, то есть от самостоятельности пациента в рамках программного движения, которые определяют с помощью датчиков тока по снижению энергопотребления электродвигателей; что и обеспечивает, соответственно, увеличение скорости движения персонажа в игре. Пациента фактически вовлекают в игровой процесс и тем самым достигают весьма существенной мотивации пациента на участие в реабилитационном процессе. Все параметры, полученные во время сеанса, могут быть сохранены для анализа его эффективности и для сопоставления с данными других сеансов лечебной гимнастики.
Заявленные объекты как изобретения обеспечивают достижение декларированного технического результата, проведение лечебного сеанса в диапазоне от полной пассивности пациента до частичного или полного отключения стимулирующих пациента воздействий, то есть в режиме тренажера, и подлежат защите соответствующим охранным документом (патентом) РФ.
Тренажер для обучения ходьбе
Тренажер для обучения ходьбе

