Результат интеллектуальной деятельности: БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО
Вид РИД
Изобретение
Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам и комплексам авианаблюдения для них, и может применяться для фото- и видеоразведки в режиме реального времени, а также биологической, химической и ядерной разведки местности и т.п., в том числе для облета периметров охраняемых объектов, территории охраняемых объектов, передачи данных в системы и комплексы защиты объектов, силам охраны объекта.
Известен комплекс авианаблюдения (патент РФ №2015067), содержащий беспилотные летательные аппараты с автономным электроприводом, передвижной контейнер и систему дистанционного управления. Беспилотные летательные аппараты выполнены в виде вертикально взлетающих платформ с четырьмя жестко закрепленными двигателями с воздушными винтами и снабжены системой автоматической посадки.
Недостатками описанного выше малогабаритного комплекса авианаблюдения являются недостаточная устойчивость и динамичность беспилотных летательных аппаратов в режиме полета и в режиме «зависания» в воздухе по причине использования только четырех электродвигателей, а также высокие массогабаритные показатели комплекса авианаблюдения и высокие требования эффективности силовой установки по причине наличия автономной электрической системы для зарядки беспилотных летательных аппаратов электроэнергией, выполненной в виде блока электродвигателя внутреннего сгорания, генератора или маховичного накопителя энергии.
Наиболее близок к настоящему изобретению комплекс авианаблюдения, описанный в патенте РФ №2232104, содержащий беспилотный летательный аппарат с электродвигателями и воздушными винтами, радиоуправляемой бортовой системой обеспечения полета, бортовой приемопередающей аппаратурой и устройством видеонаблюдения в видимом и инфракрасном спектре с передатчиком изображения, а также мобильный пульт контроля и управления с наземной приемопередающей аппаратурой, приемником видеоданных и радионавигационной системой управления беспилотным летательным аппаратом, при этом радиоуправляемая бортовая система обеспечения полета беспилотного летательного аппарата и радионавигационная система управления беспилотным летательным аппаратом снабжены корректируемыми посредством глобальной навигационной системы инерциальными блоками с микромеханическими вибрационными гироскопами - акселерометрами. Данный беспилотный летательный аппарат и комплекс авианаблюдения выбраны в качестве прототипов настоящего изобретения.
Недостатками беспилотного летательного аппарата и комплекса авианаблюдения для него прототипов являются недостаточная устойчивость и динамичность беспилотных летательных аппаратов в режиме полета и в режиме «зависания» по причине использования только четырех электродвигателей в конструкции винтовой вертикально взлетающей платформы летательных аппаратов, а также наличие дополнительных расходов электроэнергии вследствие использования для управления движением взлетающей платформы двух рулевых машинок, которые изменяют вектор тяги каждого воздушного винта с электродвигателем относительно корпуса беспилотного летательного аппарата.
Задачей настоящего изобретения является создание беспилотного летательного аппарата и комплекса авианаблюдения для него, обладающих повышенной устойчивостью при маневрировании и «зависании», возможностью пилотирования в автоматическом режиме по заданному маршруту на основании сигналов спутниковой навигационной системы, возможностью осуществления стабилизированного видеонаблюдения в видимом и инфракрасном диапазонах, а также увеличенной продолжительностью и дальностью полета вследствие более эффективного использования электроэнергии за счет использования шести электродвигателей с воздушными винтами с электронно-регулируемым числом оборотов, жестко закрепленных в вершинах воображаемого многоугольника на несущем каркасе беспилотного летательного аппарата, а также за счет использования маршрутного вычислительного устройства и системы видеонаблюдения в видимом и инфракрасном диапазонах на гиростабилизированном подвесе в комплексе авианаблюдения.
Поставленная задача решена путем создания беспилотного летательного аппарата, содержащего несущий каркас и электродвигатели с воздушными винтами, связанные с аккумуляторной батареей, отличающегося тем, что на несущем каркасе в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с воздушными винтами с контролируемой частотой вращения, связанных с маршрутным вычислительным устройством, которое связано с инерциальным измерительным устройством и блоком приема и обработки данных спутниковой навигационной системы, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, а маршрутное вычислительное устройство выполнено с возможностью управления частотой вращения электродвигателей, при этом обеспечения горизонтального положения летательного аппарата по сигналам инерциального измерительного устройства, а также обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам блока приема и обработки данных спутниковой навигационной системы для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку.
В предпочтительном варианте осуществления беспилотного летательного аппарата электродвигатели зафиксированы в одной плоскости и имеют электронные регуляторы оборотов.
В предпочтительном варианте осуществления беспилотный летательный аппарат содержит батарею питания бортовой системы обеспечения полета и силовую аккумуляторную батарею питания электродвигателей.
В предпочтительном варианте осуществления беспилотного летательного аппарата конструкция несущего каркаса содержит объединяющую несущую пластину, к которой прикреплены, по меньшей мере, шесть расходящихся от нее штанг, защита несущей пластины и шасси, причем один конец каждой штанги прикреплен к объединяющей несущей пластине, а другой конец - к креплению электродвигателя.
В предпочтительном варианте осуществления беспилотного летательного аппарата силовая аккумуляторная батарея питания электродвигателей расположена на шасси.
В предпочтительном варианте осуществления беспилотный летательный аппарат содержит прикрепленный к шасси поворотно-наклонный гиростабилизированный подвес, выполненный с возможностью установки средств видеонаблюдения и аэрофотосъемки и связанный с блоком управления поворотно-наклонным гиростабилизированным подвесом, который связан с маршрутным вычислительным устройством.
В предпочтительном варианте осуществления беспилотного летательного аппарата инерциальное измерительное устройство в микроисполнении содержит акселерометр, магнитометр, микрогироскоп и барометр.
В предпочтительном варианте осуществления беспилотного летательного аппарата маршрутное вычислительное устройство, инерциальное измерительное устройство и блок приема и обработки данных спутниковой навигационной системы образуют бортовую систему обеспечения полета.
В предпочтительном варианте осуществления беспилотного летательного аппарата бортовая система обеспечения полета расположена на объединяющей несущей пластине.
В предпочтительном варианте осуществления беспилотный летательный аппарат содержит трекер и систему аварийной посадки, связанные с маршрутным вычислительным устройством.
Поставленная задача решена также путем создания комплекса авианаблюдения, содержащего беспилотный летательный аппарат и мобильный пульт контроля и управления, отличающегося тем, что беспилотный летательный аппарат включает в себя несущий каркас, на котором в вершинах воображаемого многоугольника жестко зафиксированы, по меньшей мере, шесть электродвигателей с воздушными винтами с контролируемой частотой вращения, связанных с аккумуляторной батареей и с маршрутным вычислительным устройством, которое связано с инерциальным измерительным устройством, мобильным пультом контроля и управления, системой видеонаблюдения и блоком приема и обработки данных спутниковой навигационной системы, причем диаметрально расположенные электродвигатели имеют встречное направление вращения, а маршрутное вычислительное устройство выполнено с возможностью управления частотой вращения электродвигателей, при этом обеспечения горизонтального положения летательного аппарата по сигналам инерциального измерительного устройства, обеспечения изменения курса и высоты летательного аппарата по сигналам телеметрии с мобильного пульта контроля и управления, обеспечения контроля и управления летательным аппаратом на основании координат спутниковой навигационной системы по сигналам блока приема и обработки данных спутниковой навигационной системы для выполнения в автоматическом режиме полетного задания с возвращением на взлетную площадку, а также с возможностью обеспечения визуального контроля за полетом по сигналам видеоданных системы видеонаблюдения.
В предпочтительном варианте осуществления комплекса авианаблюдения электродвигатели зафиксированы в одной плоскости и имеют электронные регуляторы оборотов.
В предпочтительном варианте осуществления комплекс авианаблюдения содержит батарею питания бортовой системы обеспечения полета и силовую аккумуляторную батарею питания электродвигателей.
В предпочтительном варианте осуществления комплекса авианаблюдения конструкция несущего каркаса содержит объединяющую несущую пластину, к которой прикреплены, по меньшей мере, шесть расходящихся от нее штанг, защита несущей пластины и шасси, причем один конец каждой штанги прикреплен к объединяющей несущей пластине, а другой конец к креплению электродвигателя.
В предпочтительном варианте осуществления комплекса авианаблюдения силовая аккумуляторная батарея питания электродвигателей расположена на шасси.
В предпочтительном варианте осуществления комплекс авианаблюдения содержит прикрепленный к шасси поворотно-наклонный гиростабилизированный подвес, связанный с блоком управления поворотно-наклонным гиростабилизированным подвесом, который связан с маршрутным вычислительным устройством.
В предпочтительном варианте осуществления комплекса авианаблюдения инерциальное измерительное устройство в микроисполнении содержит акселерометр, магнитометр, микрогироскоп и барометр.
В предпочтительном варианте осуществления комплекса авианаблюдения маршрутное вычислительное устройство, инерциальное измерительное устройство, система видеонаблюдения и блок приема и обработки данных спутниковой навигационной системы образуют бортовую систему обеспечения полета.
В предпочтительном варианте осуществления комплекса авианаблюдения бортовая система обеспечения полета расположена на объединяющей несущей пластине.
В предпочтительном варианте осуществления комплекса авианаблюдения система видеонаблюдения содержит устройство видеонаблюдения в видимом и инфракрасном спектре и передатчик видеоданных, расположенные в бортовой системе обеспечения полета, а также приемник видеоданных, расположенный в мобильным пульте контроля и управления.
В предпочтительном варианте осуществления комплекса авианаблюдения устройство видеонаблюдения установлено на поворотно-наклонном гиростабилизированном подвесе.
В предпочтительном варианте осуществления комплекса авианаблюдения бортовая система обеспечения полета содержит приемно-передающую радиосистему, связанную с маршрутным вычислительным устройством и выполненную с возможностью обмена данными по радиоканалу с мобильной приемно-передающей радиосистемой, расположенной в мобильным пульте контроля и управления.
В предпочтительном варианте осуществления комплекса авианаблюдения мобильный пульт контроля и управления содержит портативный персональный компьютер, подключенный к мобильной приемно-передающей радиосистеме, блоку приема и обработки сигналов спутниковой навигационной системы, приемнику видеоданных, пульту управления беспилотным летательным аппаратом и мобильному индивидуальному устройству отображения видеоданных.
В предпочтительном варианте осуществления комплекс авианаблюдения содержит трекер и систему аварийной посадки, связанные с маршрутным вычислительным устройством.
Для лучшего понимания настоящего изобретения далее приводится его подробное описание с соответствующими чертежами.
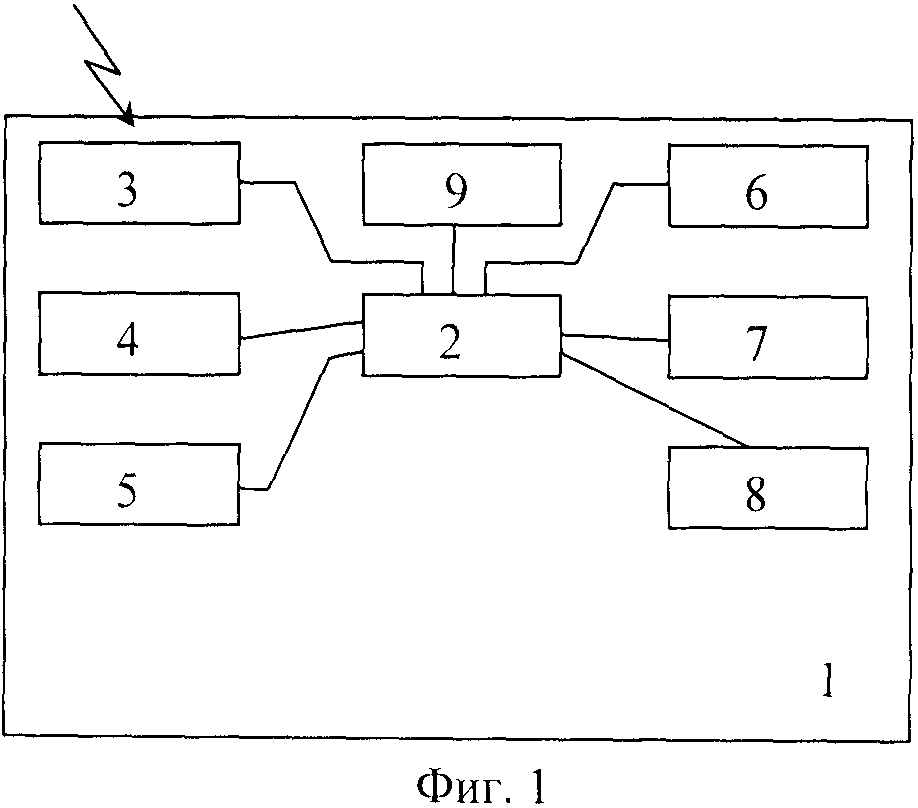
Фиг.1. Блок-схема беспилотного летательного аппарата, выполненная согласно изобретению.
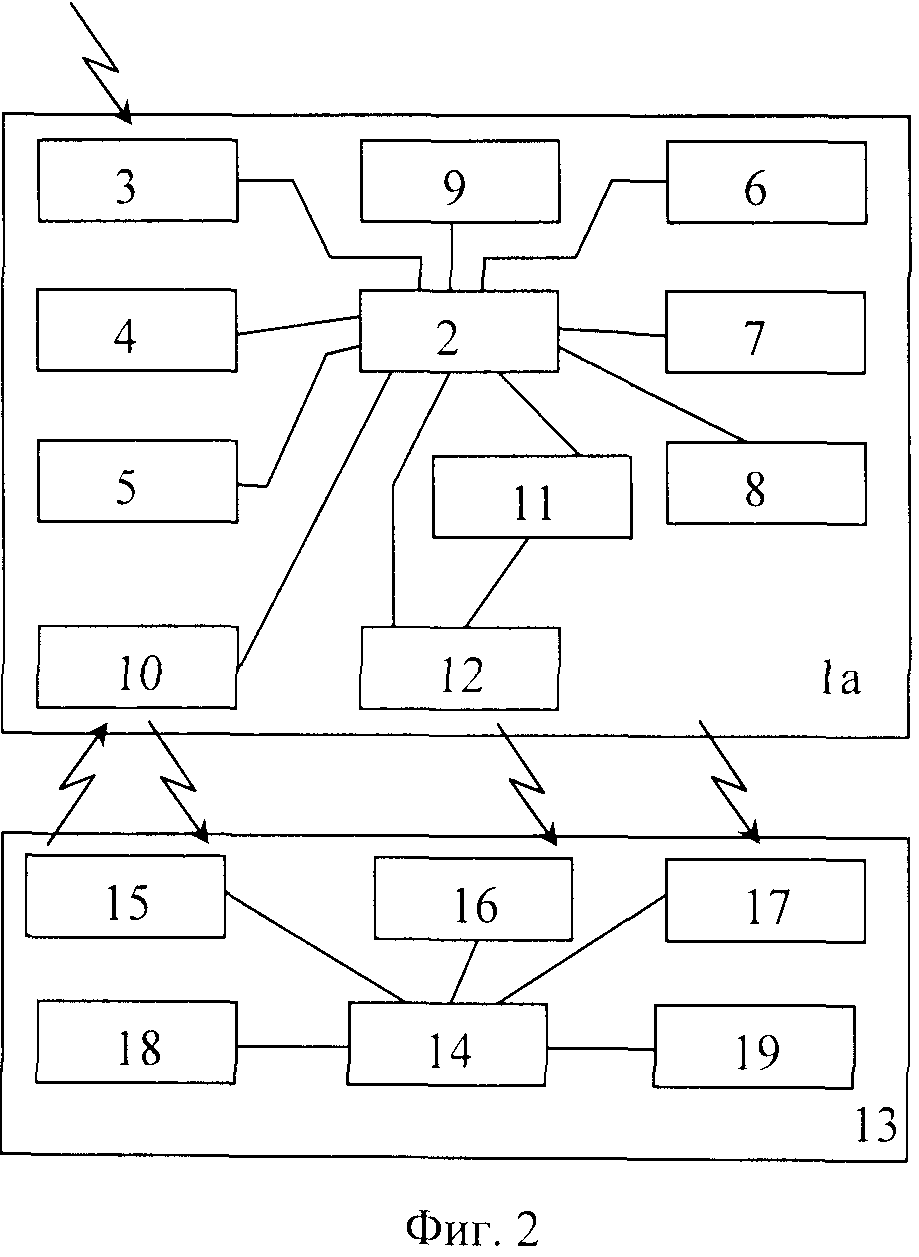
Фиг.2. Блок-схема беспилотного летательного аппарата и комплекса авианаблюдения для него, выполненная согласно изобретению.
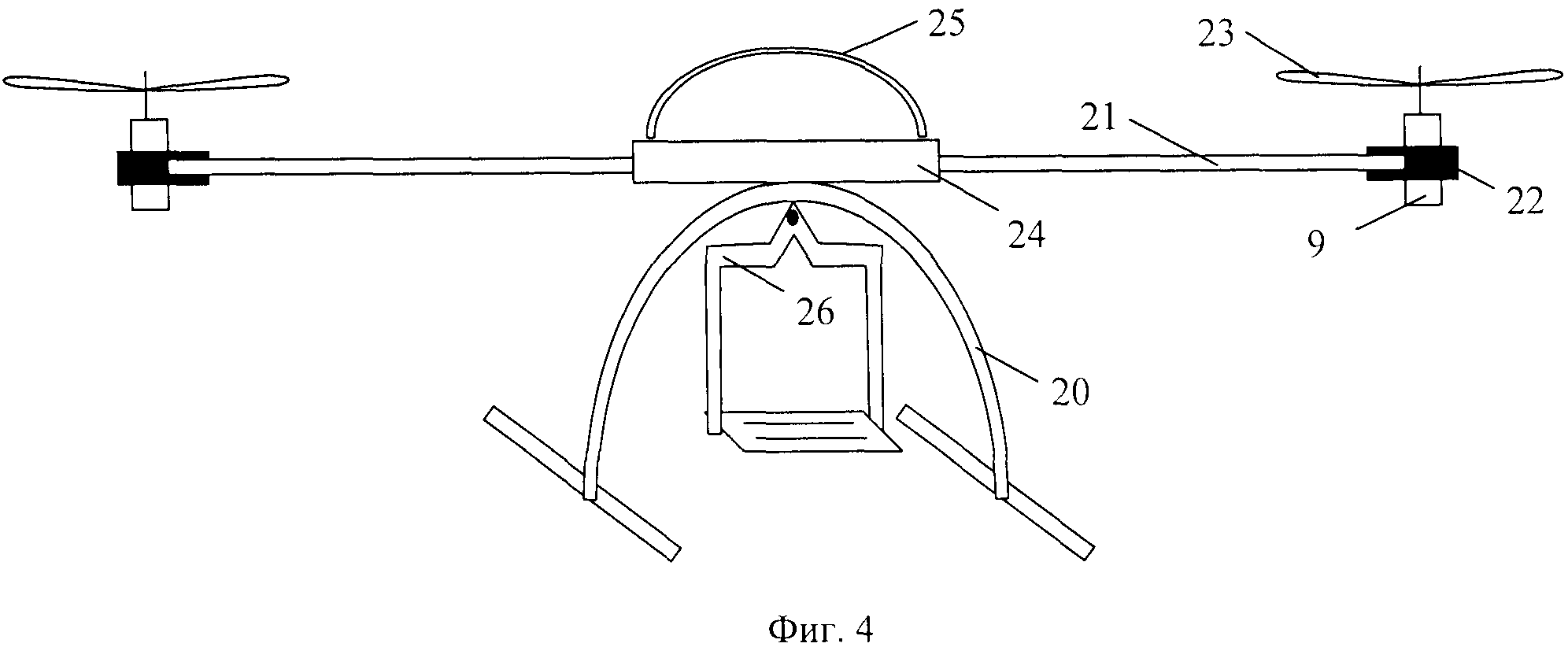
Фиг.3. Конструктивная схема (вид сверху) беспилотного летательного аппарата и комплекса авианаблюдения для него, выполненная согласно изобретению.
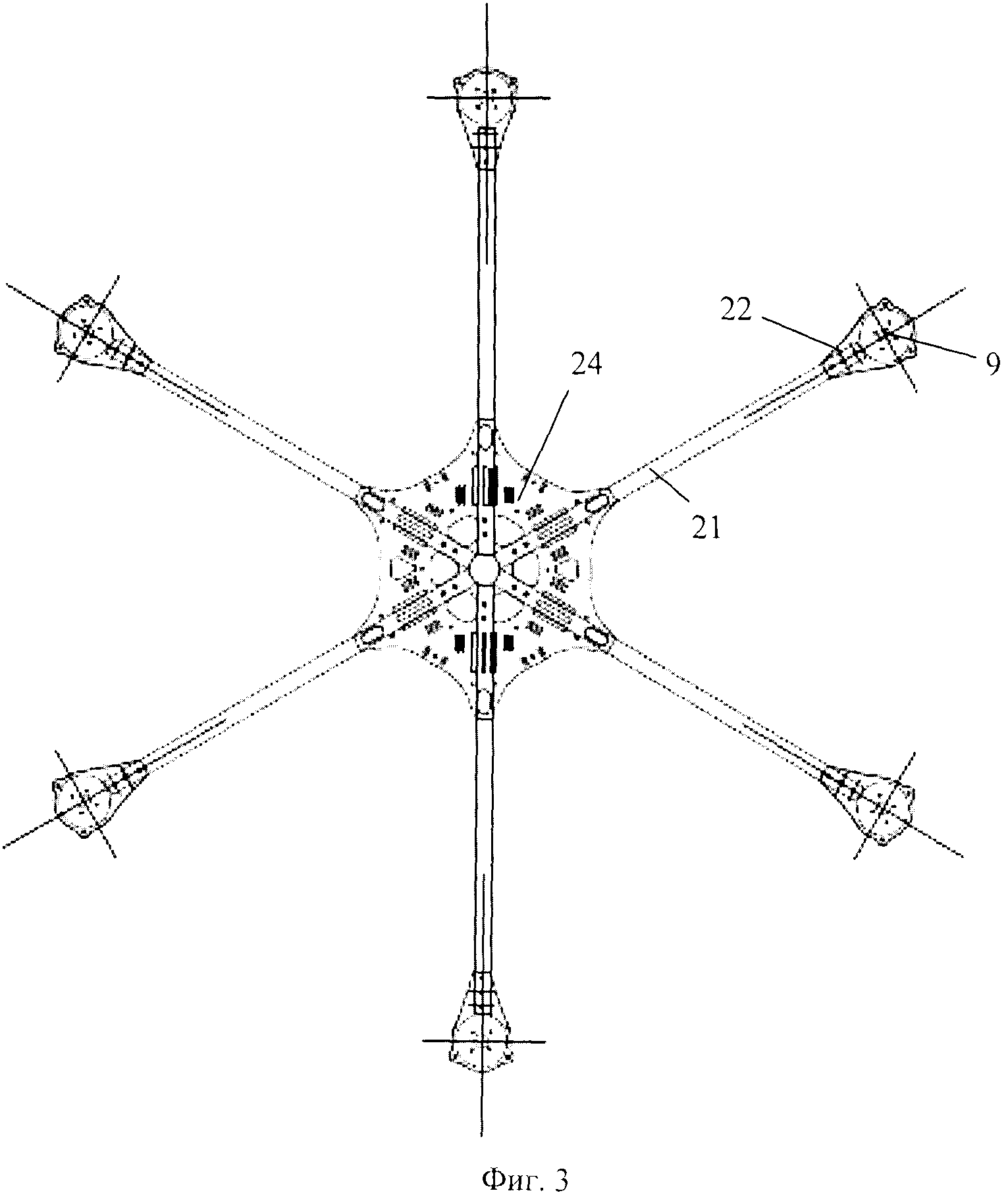
Фиг.4. Конструктивная схема (вид сбоку) беспилотного летательного аппарата и комплекса авианаблюдения для него, выполненная согласно изобретению.
Рассмотрим варианты выполнения настоящего беспилотного летательного аппарата и комплекса авианаблюдения для него, представленные на Фиг.1-4.
Рассмотрим вариант выполнения настоящего беспилотного летательного аппарата, представленный на Фиг.1. Беспилотный летательный аппарат 1 содержит маршрутное вычислительное устройство 2, связанное с блоком 3 приема и обработки сигналов спутниковой навигационной системы, инерциальным измерительным устройством 4 (содержащим акселерометр, магнитометр и барометр), трекером 5, системой 6 аварийной посадки, блоком 7 управления поворотно-наклонного гиростабилизированного подвеса, сонаром 8, шестью электродвигателями 9 с воздушными винтами (Фиг.4).
Беспилотный летательный аппарат 1а, входящий в состав комплекса авианаблюдения (Фиг.2), дополнительно содержит приемно-передающую радиосистему 10, устройство 11 видеонаблюдения в видимом и инфракрасном спектре и передатчик видеоданных 12. Мобильный пульт контроля и управления 13 содержит портативный персональный компьютер 14, связанный с мобильной приемно-передающей радиосистемой 15, приемником видеоданных 16, монитором 17, специализированным пультом 18 управления беспилотным летательным аппаратом, мобильным индивидуальным устройством 19 отображения видеоданных.
Маршрутное вычислительное устройство 2 может состоять из микропроцессора, буферных регистров, запоминающих устройств, интерфейсных схем.
Система электропитания БПЛА (беспилотного летательного аппарата) содержит два независимых источника: аккумуляторную батарею питания бортовой системы обеспечения полета и силовую аккумуляторную батарею питания электродвигателей.
Конструкция несущего каркаса беспилотного летательного аппарата 1, 1а (Фиг.3-4) состоит из шасси 20, штанг 21, креплений 22 электродвигателей 9 с воздушными винтами 23, объединяющей несущей пластины 24 и защиты верхней пластины 25. К шасси 20 прикреплен поворотно-наклонный гиростабилизированный подвес 26. На несущей пластине 24 размещена бортовая система обеспечения полета беспилотного летательного аппарата 1, 1а и аккумуляторная батарея питания бортовой системы обеспечения полета, на шасси 20 размещена силовая аккумуляторная батарея питания электродвигателей. На поворотно-наклонном гиростабилизированном подвесе 26 размещено устройство 11 видеонаблюдения.
Электродвигатели 9 расположены в вершинах воображаемого правильного шестиугольника на несущей конструкции повышенной прочности. Электродвигатели 9, расположенные диаметрально, имеют встречное направление вращения, при этом маршрутное вычислительное устройство 2 выполняет следующие функции: непосредственно управляет частотой электродвигателей 9 и на основе сигналов инерциального измерительного устройства 4 обеспечивает горизонтальное положение беспилотного летательного аппарата 1, 1а; по сигналам спутниковой навигационной системы определяет координаты и передает их на мобильный пульт контроля и управления, по сигналам телеметрии с мобильного пульта 13 контроля и управления изменяет курс и высоту беспилотного летательного аппарата 1а; а также на основе заложенной в него программы в отсутствии связи с мобильным пультом 13 контроля и управления на основании координат спутниковой навигационной системы GPS/ГЛОНАСС выполняет в автоматическом режиме полетное задание с возвращением на взлетную площадку, и обеспечивает визуальный контроль за полетом по сигналам передаваемых видеоданных, а так же по сигналам мобильного пульта контроля и управления изменяет положение системы видеонаблюдения в видимом и инфракрасном спектре, установленной на гиростабилизированный подвес, и передает видеоданные на мобильный пульт контроля и мониторинга, а так же на монитор, входящий в его состав.
Грузоподъемность беспилотного летательного аппарата составляет 2-5 кг, что в свою очередь позволяет устанавливать на него оборудование на гиростабилизированный подвес.
Конструктивно беспилотный летательный аппарат состоит из нескольких плат, рамы и бесколлекторных электродвигателей. Детали смонтированы так, чтобы обеспечить стабильность полета и неподвижное положение в режиме «висения (зависания)» в воздухе. Габаритные размеры беспилотного летательного аппарата: длина, ширина, высота с учетом вращающихся плоскостей приблизительно 1×1×0,65 м.
Беспилотный летательный аппарат 1а управляется при помощи пульта управления 13 как радиоуправляемая модель. Гиростабилизированный подвес имеет независимое управление. Дальность устойчивого ручного управления на частоте 2,4 ГГц составляет до 1-1,5 км, практически ограничивается визуальной досягаемостью аппарата. Дальность передачи телеметрии на частоте 900 МГц на расстояние 700 метров в прямой видимости. Дальность контролирования беспилотного летательного аппарата может быть увеличена при передаче с него видеосигнала в режиме реального времени, а при наличии глобального позиционирования есть возможность почти не следить за аппаратом. Беспилотный летательный аппарат выполнен с возможностью самостоятельного полета в заданную точку кратчайшим маршрутом.
При емкости аккумулятора 5-8 Ач, высота подъема может достигать нескольких сотен метров, что позволяет решать задачи ведения аэрофотосъемки, мониторинга лесных пожаров, транспортировки малогабаритных грузов, осмотра труднодоступных объектов, применения в сельскохозяйственных целях. При потере связи с мобильным пультом контроля и управления беспилотный летательный аппарат переходит в автоматический режим и способен выполнить предустановленные команды, после чего долететь до пункта назначения, руководствуясь данными системы глобального позиционирования.
Основой для технологической выполнимости настоящего беспилотного летательного аппарата и комплекса авианаблюдения являются успехи в нескольких микротехнологиях, в особенности технологиях микроэлектромеханических систем. Эти системы объединяют планарные электронные микрокомпоненты с сопоставимыми по размерам пространственными электромеханическими структурами различной сложности, что обеспечивает уникальные функциональные возможности. В настоящее время такие устройства (например, бесколлекторный электродвигатель на ниодиевых магнитах AXI 2814/22, акселерометр XL335B, пьезоэлектрический гироскоп ALI 037) производятся промышленным способом.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации настоящего изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла настоящего изобретения, раскрытого в прилагаемой формуле изобретения.
Линия по отбраковке из металлолома твердо/жидко/газонаполненных объектов
Способ и линия по отбраковке из металлолома твердо/жидко/газонаполненных объектов (варианты)
Кран-манипулятор, предназначенный для выявления из металлолома немагнитных материалов и объектов, наполненных веществами в твердом, жидком или газообразном состоянии
Система выявления немагнитных материалов, регистрации и контроля выгрузки металлолома из железнодорожных вагонов
Система мониторинга состояния ленточного конвейера преимущественно для подземных наклонно/горизонтальных горных выработок
Способ диагностики газового состава метаболитов микробиоты человека
Способ ушивания лапаротомной раны с применением сетчатой нити
Установка для досмотра объектов, преимущественно железнодорожных вагонов
Установка для досмотра объектов, преимущественно железнодорожных вагонов
Линия по отбраковке из металлолома твердо/жидко/газонаполненных объектов
Способ и линия по отбраковке из металлолома твердо/жидко/газонаполненных объектов (варианты)
Кран-манипулятор, предназначенный для выявления из металлолома немагнитных материалов и объектов, наполненных веществами в твердом, жидком или газообразном состоянии
Система выявления немагнитных материалов, регистрации и контроля выгрузки металлолома из железнодорожных вагонов
Система мониторинга состояния ленточного конвейера преимущественно для подземных наклонно/горизонтальных горных выработок

