Результат интеллектуальной деятельности: ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ
Вид РИД
Изобретение
Изобретение относится к авиационной технике и может быть использовано в летательных аппаратах вертикального взлета и посадки, выполняющих задачи радиоэлектронной разведки, видеомониторинга, охраны объектов, патрулирования в зонах с нестабильными метеоусловиями, выполняющих полеты с палуб кораблей и запускаемых с борта самолета.
Известен летательный аппарат вертикального взлета и посадки (см. патент США №3243146, кл. В64С, 29 марта 1966 г., заявлено 27 апреля 1964 г.), который имеет круглое аэродинамическое крыло с центральным отверстием, в которое вмонтирована крыльчатка, прокачивающая через отверстие воздух. Над отверстием, соосно с ним, к аэродинамическому крылу крепится крышка, образующая с крылом канал. На входе в канал смонтированы поворотные элероны и рули, которые омываются воздушным потоком и обеспечивают управление аппаратом. Под воздействием крыльчатки воздух по верхней поверхности динамического крыла течет к его центру, создавая разрежение над поверхностью, что в свою очередь приводит к возникновению подъемной силы на круглом аэродинамическом крыле, затем воздух обтекает элероны, рули внутри канала и выбрасывается вниз, создавая тягу.
Недостатком данного технического решения является расположение поворотных элеронов и рулей на малом плече, кроме того, данная компоновка летательного аппарата имеет значительные гидравлические потери при подводе воздуха к вышеназванным органам управления, что снижает их эффективность.
Известен летательный аппарат (см. патент Франции №2407131 (А1), 7830758, от 30 октября 1978 г., В64С 27/00), отличающийся тем, что его несущая конструкция, имеющая в поперечном сечении форму профиля крыла, приводится во вращение моментом, прикладываемым приводом. При этом направление вращения несущей конструкции противоположно вращению выходного вала привода. Устройство управления и кабина экипажа закреплены на оси, которая установлена в шарикоподшипниках на платформе, и имеют свободу вращения относительно конструкции и привода.
Однако в этом летательном аппарате несущая конструкция крыла вращается, что является существенным недостатком и ведет, во-первых, к повышению требований к точности изготовления элементов крыла, во-вторых, к невозможности эффективного использования внутреннего объема крыла, так как при его вращении на грузы, расположенные в крыле, действуют значительные центробежные силы.
Наиболее близким по совокупности существенных признаков к предлагаемому изобретению является летательный аппарат вертикального взлета и посадки дисковидной компоновки с центробежным вентилятором и центростремительным направлением расширения реактивной струи. Проект отражен в материалах доклада ООО «ПКФ Нева Плюс», представленных на Первом московском Международном форуме «Беспилотные многоцелевые комплексы в интересах ТЭК», «UVS-ТЕСН 2007».
В данном техническом решении аппарат выполнен в виде дисковидного несущего корпуса и образован двумя линзообразными поверхностями, установленными с определенным зазором одна относительно другой. Зазор выполняет функции кольцевого сопла аппарата и обеспечивает центростремительное направление расширения реактивной струи.
Верхняя поверхность корпуса оснащена всасывающим отверстием для обеспечения подачи воздуха к центробежному вентилятору, нижняя, более выпуклая, формирует определенный профиль истечения воздушной струи, обеспечивая необходимую подъемную силу и устойчивость аппарата. Нижняя же поверхность корпуса аппарата оснащена отдельными поворотными крылообразными поверхностями управления по тангажу, крену и курсу.
Недостатками данного технического решения являются:
во-первых, наличие отдельных крылообразных, легкоповреждаемых поверхностей управления по тангажу, крену и курсу на нижней поверхности корпуса аппарата, которые выходят за его габариты;
во-вторых, такие поверхности управления в горизонтальном полете создают дополнительное лобовое сопротивление и дестабилизирующие моменты;
в-третьих, в кольцевой зоне выхода воздуха из сопла на нижней поверхности аппарата имеет место падение давления выходящего воздуха на большом плече, приводящее к возникновению отрицательной подъемной силы, что в целом приводит к снижению КПД всего устройства.
Задачей, на решение которой направлено предполагаемое изобретение, является создание такого аппарата, который мог бы эффективно управляться путем изменения величины аэродинамических сил, возникающих на поверхности корпуса аппарата.
Кроме того, ставится задача получить аппарат, скомпонованный таким образом, чтобы его поверхности управления были эффективными и не выступали за габариты аппарата.
Третьей задачей изобретения является повышение КПД всего устройства, его безопасности и надежности.
Поставленные технические задачи решаются в результате того, что летательный аппарат вертикального взлета и посадки, дисковидной компоновки оснащен силовым агрегатом, выполненным комбинированным, содержащим два привода и вентиляторы противоположного вращения, один из которых, центробежный, обеспечивает движение потока с его центростремительным расширением на выходе из внутреннего пространства наружного дисковидного корпуса, а другой, осевой в кольце, прикрепленном коаксиально с зазором к внешней поверхности наружного дисковидного корпуса, нагнетает поток с изменением направления от осевого к радиальному вдоль поверхности «Коанда», причем наружный дисковидный корпус содержит размещенный эквидистантно его внутренней поверхности удобообтекаемый модуль оборудования и целевой нагрузки, состоящий из обшивки двойной кривизны, меридиональных и экваториальных элементов каркаса, с прикрепленными к ним узлами крепления опор шасси, оборудования и целевой нагрузки, а изменение величины подъемной силы, управление и перемещения аппарата в пространстве осуществляются отклонениями дополнительного кольцевого крыла, обдуваемого потоком воздуха реактивной струи, причем развороты аппарата вокруг вертикальной оси обеспечивают выдвижные из модуля оборудования и целевой нагрузки аэродинамические управляющие поверхности.
Частными существенными признаками изобретения являются следующие.
Применение комбинированного силового агрегата на основе двух приводов, оснащенных вентиляторами противоположного вращения, один из которых центробежный, а другой осевой в кольце.
Наличие осевого вентилятора противоположного вращения, нагнетающего поток воздуха вдоль вертикальной оси аппарата, с последующим центробежным изменением направления истечения воздушной струи.
Использование наружной поверхности аппарата, сформированной в виде поверхности «Коанда», для создания дополнительной подъемной силы путем ее обдува потоком воздуха, создаваемого осевым вентилятором.
Использование реактивной струи воздуха, истекающей из кольцевого сопла центробежного вентилятора, обтекающей верхнюю поверхность дополнительного кольцевого крыла, для создания управляемого приращения подъемной силы.
Применение подвижного крепления крыла с помощью эластомерных втулок, независимо скользящих вдоль опор шасси аппарата, позволяющих менять углы установки крыла, величину дополнительной аэродинамической силы и положение аппарата в пространстве по тангажу и крену.
Использование выдвижных аэродинамических управляющих поверхностей для управления аппаратом по курсу и его разворотов, которые работают в потоке воздуха реактивной струи в пределах габаритов аппарата, позволяя сократить число выступающих элементов.
Обеспечиваемый технический результат заключается в интеграции использования аэродинамических эффектов и особенностей компоновки аппарата, которые позволяют придать новые свойства классу летательных аппаратов, выполненных по схеме «Летающая тарелка».
Заявляемый летательный аппарат вертикального взлета и посадки способен выполнять требуемые условия решаемых задач с повышенным значением КПД, с использованием эффективного способа управления, с пониженным значением лобового сопротивления. Аппарат ветроустойчив и может быть использован в горных районах, северных широтах, а также в Военно-Морском Флоте России, со снижением стоимости выполнения операций.
Предлагаемое изобретение поясняется чертежами, где:
- на Фиг.1 - вид аппарата сбоку в разрезе в полете и при стоянке на земле;
- на Фиг.2 - вид аппарата сверху;
- на Фиг.3 - схема возникновения равных дополнительных аэродинамических сил Yдоп.;
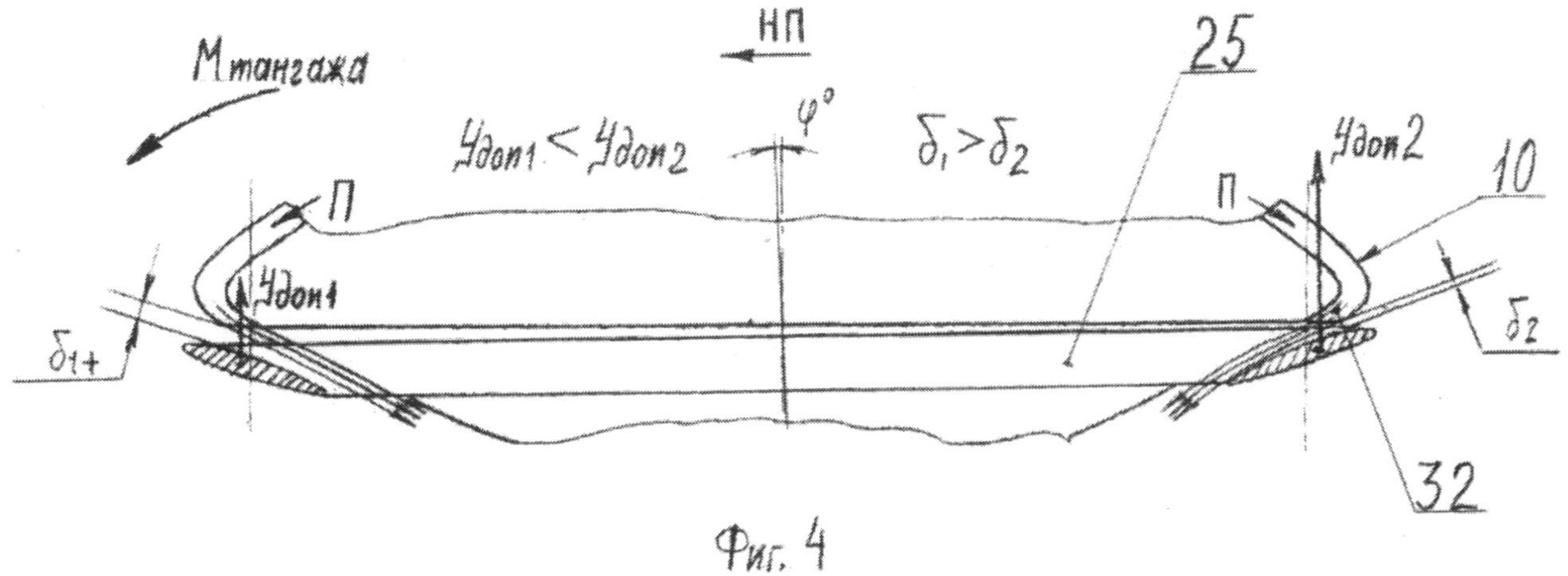
- на Фиг.4 - схема возникновения неравных дополнительных аэродинамических сил Yдоп., создающих Мтангажа, при виде на аппарат сбоку в горизонтальном полете; φ - угол отклонения вертикальной оси кольцевого крыла управления по тангажу и крену; б1, б2 - величина зазора, характеризующая удаление верхней поверхности кольцевого крыла управления по тангажу и крену от кольцевого сопла центробежного вентилятора; б1+ увеличение зазора б1 по отношению к зазору б2; б2+ увеличение зазора б2 по отношению к зазору б1. ← НП - направление полета; ← П - направление нагнетаемого потока центробежным вентилятором;
- на Фиг.5 - схема возникновения неравных дополнительных аэродинамических сил Yдоп., создающих Мкрена, при виде на аппарат спереди.
Летательный аппарат вертикального взлета и посадки (Фиг.1, Фиг.2) снабжен двухприводным комбинированным силовым агрегатом. В состав силового агрегата входит вентилятор 1, размещенный в туннеле 2, который приводится во вращение приводом осевого вентилятора 3 и закреплен пилонами 4 внутри туннеля 2. Нижняя торцевая часть туннеля 2 оснащена лопатками диффузора 5. В состав силового агрегата также входит центробежный вентилятор 6, приводимый в противоположное вращение приводом центробежного вентилятора 7, закрепленный на плате крепления привода 8, в корпус 9.
Наружный дисковидный корпус 10 летательного аппарата спрофилирован в виде поверхности «Коанда», посредством лопаток диффузора осевого вентилятора 5 состыкован с туннелем осевого вентилятора 2, образуя устройство, способное создавать подъемную силу.
К внутренней поверхности наружного дисковидного корпуса 10 прикреплены лопатки диффузора центробежного вентилятора 11, а к ее периферийной части - спрямляющие лопатки диффузора 12. Внутри наружного дисковидного корпуса 10 размещен эквидистантно его внутренней поверхности удобообтекаемый модуль оборудования и целевой нагрузки 13, образованный верхней обшивкой двойной кривизны 14, нижней обшивкой двойной кривизны 15 и съемной формообразующей крышкой люка обслуживания 16. При этом верхняя обшивка двойной кривизны 14 модуля 13 подкреплена меридиональными элементами каркаса 17 и экваториальными элементами каркаса 18. На максимальном радиусе удобообтекаемого модуля оборудования и целевой нагрузки 13 установлены с возможностью поступательного перемещения в радиальном направлении выдвижные лопатки управления по курсу 19, которые в четном количестве связаны тросовой проводкой управления по курсу 20 с объединенным узлом управления по курсу 21. Поворот объединенного узла управления по курсу задается одним из сервоприводов системы управления 22. В силовой конструкции удобообтекаемого модуля оборудования и целевой нагрузки 13, в его периферийной части, со стороны нижней обшивки двойной кривизны, вмонтированы узлы крепления опор шасси 23, со стойками опор шасси 24, которые являются скользящими направляющими, обеспечивающими независимое качание кольцевого крыла управления по тангажу и крену 25, на эластомерных втулках 26. Внутри стоек опор шасси 24 посредством резьбового соединения закреплены пружинящие стойки опор шасси 27 с амортизаторами 28, которые опираются на эластичные опорные башмаки 29.
Привод осевого вентилятора 3 в своей верхней части закрыт носовым обтекателем 30. Нижняя торцевая часть туннеля 2, оснащенная лопатками диффузора 5, образует кольцевое сопло осевого вентилятора 31 и предназначена для подачи потока воздуха на поверхность наружного дисковидного корпуса 10 летательного аппарата, спрофилированного в виде поверхности «Коанда».
Между нижней частью обшивки двойной кривизны 15 и нижней кромкой верхней обшивки 14, на периферии, образовано кольцевое сопло центробежного вентилятора 32 с центростремительным расширением потока воздушной струи.
Кольцевое крыло управления по тангажу и крену 25 приводится в движение (качание) приводными кронштейнами 33, соединенными тягами и качалками с системой 34 наклона кольцевого крыла управления.
Летательный аппарат вертикального взлета и посадки (Фиг.1, Фиг.2) работает следующим образом. При стоянке на земной поверхности аппарат опирается на стойки опор шасси 24. Стойки опор шасси 24 посредством узлов крепления 23 закреплены в конструкции аппарата. Внутри стоек опор шасси 24 закреплены пружинящие стойки опор шасси 27 с амортизаторами шасси 28, которые, в свою очередь, опираются на эластичные опорные башмаки 29 и передают усилия от массы аппарата на земную поверхность.
Перед выполнением взлета аппарата включается двухприводной комбинированный силовой агрегат. В состав двухприводнго комбинированного силового агрегата входит высокооборотный привод центробежного вентилятора 7, который вращает центробежный вентилятор 6. Центробежный вентилятор 6 сжимает воздух и нагнетает его между верхней обшивкой двойной кривизны 14 и внутренней поверхностью наружного дисковидного корпуса 10. Там же, между верхней обшивкой двойной кривизны 14 и внутренней поверхностью наружного дисковидного корпуса 10, размещены лопатки диффузора центробежного вентилятора 11. Нагнетаемый поток воздуха проходит между лопатками диффузора 11, расширяется, преобразуя, таким образом, в соответствии с законом Бернулли, энергию скоростного напора воздуха в энергию давления. Кроме того, направление закрутки лопаток диффузора 11 создает силу, позволяющую уменьшить действие реактивного момента от силовой установки на конструкцию аппарата. На входе потока воздуха в кольцевое сопло центробежного вентилятора 32 происходит его выравнивание спрямляющими лопатками 12. Струя воздуха, истекая из кольцевого сопла центробежного вентилятора 32 в центростремительном направлении (Фиг.3), обтекает верхнюю поверхность кольцевого крыла управления по тангажу и крену 25 и создает на его поверхности аэродинамические силы Yдоп.1 и Yдоп.2, Yдоп.1=Yдоп.2. Данное распределение аэродинамических сил характерно для полета аппарата в конфигурации зависания. Величина аэродинамических сил может меняться в зависимости от удаления верхней поверхности кольцевого крыла управления по тангажу и крену 25 от кольцевого сопла центробежного вентилятора 32 с зазором б1 и б2 (Фиг.4, где б1>б2; Yдоп.1<Yдоп.2), (Фиг.5, где б1<б2; Yдоп.1>Yдоп.2). При этом изменение интенсивности обдува верхней поверхности кольцевого крыла управления по тангажу и крену 25 приводит к соответствующему изменению величин управляющих моментов Мтантажа, Мкрена, что и легло в основу принципа управления данным аппаратом вокруг осей X и Z.
Для реализации возможности заданного изменения интенсивности обдува верхней поверхности кольцевого крыла управления по тангажу и крену 25 и создания, таким образом, контролируемых управляющих моментов Мтантажа и Мкрена оно подвешено шарнирно с возможностью качания вокруг осей X и Z на 4-х эластомерных втулках 26. Эластомерные втулки 26 своими центральными частями имеют возможность скользить вдоль осей стоек опор шасси 24. При этом периферийные части эластомерных втулок 26 закреплены в конструкции кольцевого крыла управления по тангажу и крену 25. Такая схема подвески кольцевого крыла управления по тангажу и крену 25 позволяет его противоположно расположенным частям попеременно то удаляться, то приближаться к кольцевому соплу центробежного вентилятора 32, с переменным зазором б1, б2. В результате этого меняется интенсивность обдува этих участков кольцевого крыла 25. Сам процесс качания кольцевого крыла управления по тангажу и крену 25 во всем диапазоне его отклонений на заданные углы практически не сказывается на аэродинамике полета аппарата ввиду очень малых относительных значений углов его отклонения.
Управление аппаратом по тангажу посредством изменения интенсивности обдува верхней поверхности кольцевого крыла управления по тангажу и крену 25 производится следующим образом. После получения команды (например, угол тангажа должен быть отрицательным, направление полета влево ← НП) (Фиг.4) задний участок верхней поверхности кольцевого крыла управления по тангажу и крену 25 относительно кольцевого сопла центробежного вентилятора 32 имеет величину зазора б2, интенсивность его обдува неизменна, а величина аэродинамической силы равна Yдоп.2. При этом передний участок кольцевого крыла 25 отклоняется сервоприводом 22 на величину зазора б1+ между кольцевым крылом 25 и кольцевым соплом 32. В этом случае падает интенсивность обдува переднего участка кольцевого крыла 25, что ведет к уменьшению величины аэродинамической силы Yдоп.1. Соответственно, момент управляющего воздействия (Мтангажа), возникающий от аэродинамической силы Yдоп.2, на плече, близком к величине радиуса кольцевого крыла 25, заставляет этот участок кольцевого крыла 25 опускаться вместе с наружным дисковидным корпусом 10. В режиме горизонтального полета это приводит к выходу аппарата на отрицательный угол тангажа, т.е. полету со снижением.
Для увеличения угла тангажа аппарата обдуваемый участок кольцевого крыла управления по тангажу и крену 25 меняется на противоположно расположенный. В этом случае отклонение сервоприводом 22 осуществляется через систему наклона кольцевого крыла 34 заднего участка кольцевого крыла 25 до величины зазора б2+.
В случае получения команды на изменение угла крена (например, крен должен быть «вправо») (Фиг.5) левый участок верхней поверхности кольцевого крыла управления по тангажу и крену 25 относительно кольцевого сопла центробежного вентилятора 32 имеет величину зазора б1, интенсивность его обдува неизменна, а величина аэродинамической силы равна Yдоп.1. При этом правый участок кольцевого крыла 25, после получения команды на изменение угла крена, отклоняется одним из сервоприводов 22 до величины зазора б2+ между кольцевым крылом 25 и кольцевым соплом 32. В этом случае уменьшается интенсивность обдува правого участка кольцевого крыла 25, что ведет к уменьшению величины аэродинамической силы Yдоп.2. Соответственно, момент управляющего воздействия (Мкрена), возникающий от аэродинамической силы Yдоп.1, на плече, близком к величине радиуса кольцевого крыла 25, заставляет опускаться этот участок кольцевого крыла 25 «вправо», вместе с наружным дисковидным корпусом 10, т.е. заставляет летательный аппарат крениться «вправо». В режиме горизонтального полета аппарат совершает правый крен, изменяя траекторию полета.
Для осуществления крена аппарата «влево» обдуваемый участок кольцевого крыла управления по тангажу и крену 25 меняется на противоположно расположенный. В этом случае отклонение одним из сервоприводов 22 осуществляется через систему наклона кольцевого крыла 34 левого участка кольцевого крыла 25 до величины зазора б1+.
Система наклона кольцевого крыла 34 включает в себя четыре сервопривода 22, которые посредством жесткой проводки управления связаны с центральными частями эластомерных втулок 26 и приводными кронштейнами кольцевого крыла управления 33. Реализуя команды управления аппаратом во всех конфигурациях полета, сервоприводы 22 через систему наклона кольцевого крыла 34 и приводные кронштейны кольцевого крыла управления 33 передают усилия на кольцевое крыло управления по тангажу и крену 25. Эластомерные втулки 26, закрепленные в конструкции кольцевого крыла 25, имеют возможность своими центральными частями скользить по поверхности стоек опор шасси 24 вдоль их оси и обеспечивать, таким образом, возможность независимого качания кольцевого крыла управления по тангажу и крену 25 относительно осей X, Y. Управление аппаратом по курсу вокруг оси Y, как аварийный вариант, может обеспечиваться разницей величин вращающих моментов привода осевого вентилятора 3 и привода центробежного вентилятора 7, которые обеспечиваются разным по величине напряжением питания приводов.
В штатном режиме развороты аппарата вокруг вертикальной оси Y обеспечивают вводимые в поток между верхней обшивкой двойной кривизны 14 и внутренней поверхностью наружного дисковидного корпуса 10 выдвижные лопатки управления по курсу 19, которые убираются в удобообтекаемый модуль оборудования и целевой нагрузки 13. Выдвижные лопатки 19 имеют такие углы установки и площади, что способны создавать аэродинамические силы, противодействующие реактивному моменту, создаваемому комбинированным силовым агрегатом, и даже превышать это значение. В убранном положении лопатки 19 не выступают за пределы габаритов удобообтекаемого модуля оборудования и целевой нагрузки 13. Действующие на лопатки 19 аэродинамические силы в этом случае равны 0.
Введение в поток и увод из потока выдвижных лопаток управления по курсу 19 осуществляется от одного из сервоприводов системы управления 22 через объединенный узел управления по курсу 21 и тросовую проводку управления по курсу 20.
Воздушный поток, истекающий из кольцевого сопла центробежного вентилятора 32, выходя за пределы кольцевого крыла управления по тангажу и крену 25, устремляется вдоль поверхности нижней обшивки двойной кривизны 15 и съемной формообразующей крышки люка обслуживания 16. Реактивная струя, расширяясь в центростремительном направлении, улучшает стабилизацию полета ЛА и обеспечивает возникновение основной аэродинамической подъемной силы аппарата.
Для повышения общей тяговооруженности аппарата в данном техническом решении используется двухприводной комбинированный силовой агрегат. В состав силового агрегата, кроме высокооборотного привода центробежного вентилятора 7, вращающего центробежный вентилятор 6, входит привод осевого вентилятора 3, оснащенный осевым вентилятором 1 в туннеле 2, который имеет противоположное вращение по отношению к приводу центробежного вентилятора 7. Данный агрегат расположен над наружным дисковидным корпусом 10 с зазором, равным высоте кольцевого сопла осевого вентилятора 31. Он нагнетает поток воздуха в туннеле осевым вентилятором 2 и в соответствии с конфигурацией наружного дисковидного корпуса 10, в месте установки туннеля 2, обеспечивает поворот воздушной струи на угол около 85 градусов, инициируя его интенсивное истечение из кольцевого сопла осевого вентилятора 31. Поток, истекая из кольцевого сопла осевого вентилятора 31, вдоль внешней поверхности наружного дисковидного корпуса 10, выполненной в соответствии с математическим описанием поверхности «Коанда», обеспечивает возникновение второй дополнительной аэродинамической подъемной силы аппарата.
Летательный аппарат вертикального взлета и посадки может быть изготовлен на небольших производственных площадях с использованием современных материалов и технологий.
При реализации изобретения могут использоваться различные конструктивные исполнения приводов, лопаточных и безлопаточных диффузоров, различные конструктивные решения кольцевых сопл и спрямляющих устройств. Могут применяться различные устройства управления лопатками осевых и центробежных нагнетателей, а также различные методы формообразования воздухозаборников, воздуховодов и их протяженности, отличающихся от описанных в данной заявке и приведенных на чертежах, иллюстрирующих изобретение, без отхода от идеологии и рамок настоящего изобретения, определяемых объемом притязаний, изложенных в формуле изобретения.
Таким образом, создана концепция летательного аппарата, имеющего повышенную безопасность, надежность и эффективность в условиях турбулентной атмосферы, в том числе обладающего необходимой маневренностью в широком диапазоне скоростей полета вплоть до зависания аппарата в воздухе и выполнения вертикальной посадки.
Авторами изготовлена летающая модель для отработки аэродинамических свойств аппарата, исследования динамики полета при вертикальном взлете и посадке (два фото).
Летательный аппарат вертикального взлета и посадки, дисковидной компоновки с центробежным вентилятором и центростремительным направлением расширения потока реактивной струи, отличающийся тем, что его силовой агрегат выполнен комбинированным, содержащим два привода и вентиляторы противоположного вращения, один из которых, центробежный, обеспечивает движение потока с его центростремительным расширением на выходе из внутреннего пространства наружного дисковидного корпуса, а другой, осевой в кольце, прикрепленном коаксиально с зазором к внешней поверхности наружного дисковидного корпуса, нагнетает поток с изменением направления от осевого к радиальному вдоль поверхности «Коанда», причем наружный дисковидный корпус содержит размещенный эквидистантно его внутренней поверхности удобообтекаемый модуль оборудования и целевой нагрузки, состоящий из обшивки двойной кривизны, меридиональных и экваториальных элементов каркаса, с прикрепленными к ним узлами крепления опор шасси, оборудования и целевой нагрузки, а изменение величины подъемной силы, управление и перемещения аппарата в пространстве осуществляются отклонениями дополнительного кольцевого крыла, обдуваемого потоком воздуха реактивной струи, причем развороты аппарата вокруг вертикальной оси обеспечивают выдвижные из модуля оборудования и целевой нагрузки аэродинамические управляющие поверхности.


Трансформируемый беспилотный летательный аппарат
Трансформируемый беспилотный летательный аппарат
Плавучий причал

