Результат интеллектуальной деятельности: РАБОЧЕЕ КОЛЕСО ОСЕВОГО ВЕНТИЛЯТОРА (ВАРИАНТЫ)
Вид РИД
Изобретение
Изобретение относится к вентиляторостроению и может быть использовано в составе систем терморегулирования изделий авиационной и ракетной техники.
Известно рабочее колесо осевого вентилятора, содержащее ступицу с выполненными заодно с ней профилированными лопатками (см. патент РФ №2133383, МПК: F04D 19/00, 1999 г.). Недостатком этого рабочего колеса осевого вентилятора является сложность конструкции, вызванная выполнением профилированных лопаток заодно со ступицей.
Этого недостатка лишено рабочее колесо осевого вентилятора, содержащее ступицу с основаниями, снабженными пазами шириной S, в которых установлены хвостовики листовых лопаток толщиной s, присоединенные к основаниям посредством штифтовых соединений, выбранное в качестве прототипа (см. патент РФ N 2422681, МПК: F04D 19/02, 2011 г.) Выполнение лопаток листовыми существенно упрощает конструкцию рабочего колеса.
Недостатком такого рабочего колеса осевого вентилятора является его низкая надежность, что вызвано наличием зазора в соединении между хвостовиком листовой лопатки и пазом за счет допусков на толщину листа и ширину паза. Наличие допусков на толщину листа, из которого изготавливают лопатки, неизбежно, также невозможно изготовление паза (а его можно сделать либо методом фрезерования, либо методом электроэрозионной обработки) с высокой точностью, обеспечивавшей бы плотную посадку хвостовика в паз. При вибрациях, свойственных изделиям авиационной, а особенно космической техники, листовая лопатка начинает колебаться в пределах указанного зазора, что приводит к увеличению амплитуды ее колебаний, и, в конечном итоге, к разрушению лопатки, вызванному циклическими напряжениями изгиба. Другим недостатком рабочего колеса является низкая технологичность, что связано с необходимостью крепления хвостовика каждой лопатки к основанию как минимум двумя штифтами - при креплении хвостовика лопатки одним штифтом невозможно обеспечить фиксацию лопатки в угловом направлении относительно оси этого штифта.
Техническим результатом заявляемого устройства является повышение надежности и технологичности.
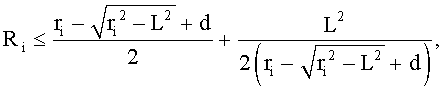
Указанный технический результат по первому варианту достигается за счет того, что в известном рабочем колесе осевого вентилятора, содержащем ступицу с основаниями, снабженными пазами шириной S, в которых установлены хвостовики листовых лопаток толщиной s, присоединенные к основаниям посредством штифтового соединения, в отличие от известного внутренняя поверхность хвостовика каждой листовой лопатки выполнена в виде участка кругового цилиндра радиуса r с образующей, параллельной продольной оси листовой лопатки, а внутренняя поверхность паза каждого основания выполнена в виде участка кругового цилиндра радиуса R с образующей, параллельной образующей внутренней поверхности хвостовика листовой лопатки, и внутренние поверхности хвостовика и паза обращены друг к другу, при этом
где d=S-s, a L - половина ширины хорды хвостовика листовой лопатки по ее внутренней поверхности;
Указанный технический результат по второму варианту достигается за счет того, что в известном рабочем колесе осевого вентилятора, содержащем ступицу с основаниями, снабженными пазами шириной S, в которых установлены хвостовики листовых лопаток толщиной s, присоединенные к основаниям посредством штифтового соединения, в отличие от известного, наружная поверхность хвостовика каждой листовой лопатки выполнена в виде участка кругового цилиндра радиуса rH с образующей, параллельной продольной оси листовой лопатки, а наружная поверхность паза каждого основания выполнена в виде участка кругового цилиндра радиуса R с образующей, параллельной образующей внутренней поверхности хвостовика листовой лопатки, и наружные поверхности хвостовика и паза обращены друг к другу, при этом

где d=S-s, a L - половина ширины хорды хвостовика листовой лопатки по ее наружной поверхности.
Дополнительно, для максимального упрощения конструкции, при реализации как первого варианта, так и второго варианта, основания могут быть выполнены за одно целое со ступицей, при этом в конструкциях осевых вентиляторов с достаточно большим втулочным отношением, при котором окружные скорости точек в любом сечении лопатки близки по значению, вся листовая лопатка может быть выполнена с постоянным по ее длине профилем (как рабочая часть лопатки, находящаяся в потоке перекачиваемого воздуха, так и ее хвостовик).
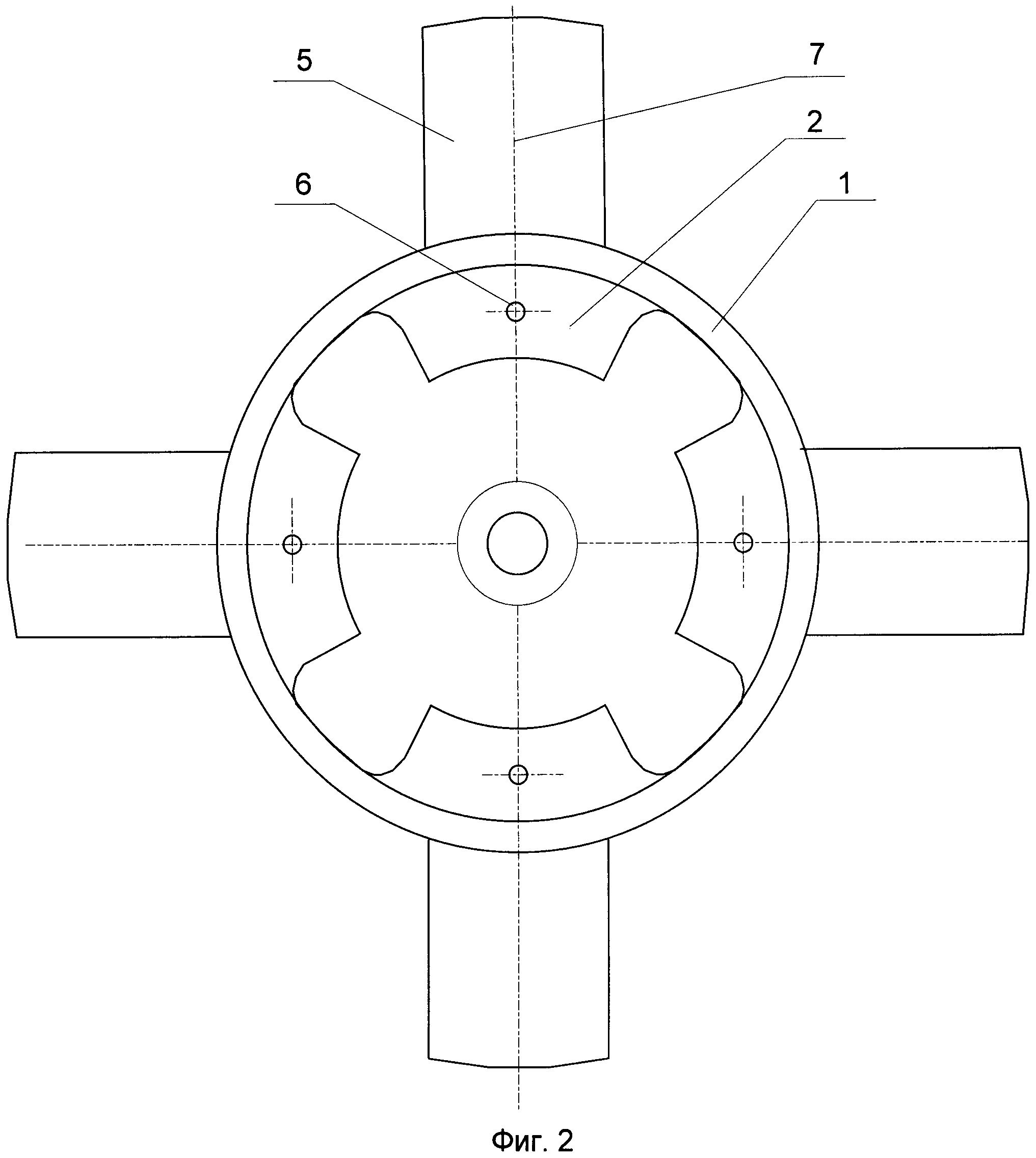
На фиг.1 приведен пример конкретного выполнения рабочего колеса осевого вентилятора, первый вариант, главный вид; на фиг.2 - то же, вид справа; на фиг.3 - то же, вид сверху; на фиг.4 - расчетная схема для вывода математической зависимости, первый вариант; на фиг.5 - пример конкретного выполнения рабочего колеса осевого вентилятора, второй вариант, главный вид; на фиг.6 - то же, вид сверху; на фиг.7 - расчетная схема для вывода математической зависимости, второй вариант. Фиг.2 относится к обоим вариантам исполнения рабочего колеса осевого вентилятора.
Рабочее колесо осевого вентилятора, как по первому варианту, так и по второму варианту, содержит ступицу 1 с основаниями 2, снабженными пазами 3, в которых установлены хвостовики 4 листовых лопаток 5, присоединенные к основаниям 2 посредством штифтового соединения штифтом 6. У каждой лопатки 5 есть продольная ось 7. Ширина каждого паза 3 равна S, а толщина хвостовика 4 каждой листовой лопатки 5 равна s. При выполнении рабочего колеса по первому варианту внутренняя поверхность 8 хвостовика 4 каждой листовой лопатки 5 выполнена в виде участка кругового цилиндра радиуса r с образующей, параллельной продольной оси 7 листовой лопатки 5, а внутренняя поверхность 9 паза 3 каждого основания 2 выполнена в виде участка кругового цилиндра радиуса R с образующей, параллельной образующей внутренней поверхности 8 хвостовика 4 листовой лопатки 5, внутренние поверхности 8 хвостовика 4 и 9 паза 3 обращены друг к другу, при этом
где d=S-s, a L - половина ширины хорды хвостовика листовой лопатки по ее внутренней поверхности.
Рабочее колесо осевого вентилятора работает следующим образом: при приведении ступицы 1 во вращение от вала, установленного внутри нее (не показан), листовые лопатки 5 создают поток перекачиваемого газа. При этом за счет выполнения геометрических размеров паза и хвостовика по приведенной в формуле изобретения геометрической зависимости обеспечивается беззазорное соединение хвостовика 4 в пазу 3 - хвостовик 4 имеет три зоны линейного контакта со стенками паза 3 - одна зона контакта по образующей наружной поверхности хвостовика 4 в середине хвостовика и две зоны контакта по образующим внутренней поверхности хвостовика 4 по краям его поперечного сечения. Беззазорное соединение хвостовика с пазом позволяет устранить возможность колебаний лопаток 5 относительно пазов 3 и позволяет обеспечить угловую фиксацию лопатки 5 использованием только одного штифта 6 в каждом соединении хвостовика 4 с пазом 3. При попытке «провернуть» лопатку в угловом направлении относительно оси штифта 6 (за счет сил инерции, реакции потока перекачиваемого газа на лопатку) возникают реакции со стороны указанных трех зон линейного контакта, препятствующие этому перемещению, поскольку такое перемещение сразу вызывает упругие деформации хвостовика 4 лопатки 5, препятствующие такому перемещению. Таким образом, штифт обеспечивает фиксацию лопатки в радиальном направлении, а указанные три зоны линейного контакта - фиксацию лопатки в угловом направлении. Признак «внутренние поверхности хвостовика и паза обращены друг к другу» однозначно определяет их взаимное положение, для которого справедливы вышеприведенные выводы и расчетная схема. Теоретически возможно и другое взаимное расположение - когда внутренняя поверхность хвостовика и наружная поверхность паза обращены друг к другу - для него приведенное математическое выражение неприменимо, но такое взаимное расположение не имеет практического смысла, т.к. может быть обеспечено лишь при большой величине d = S-s, что будет сильно снижать аэродинамические характеристики колеса за счет сильной турбулизации потока. Для наглядности проведем расчет значения R для хвостовика лопатки со следующими параметрами: s = 1 мм, L = 6 мм, S = 1+0,2мм, r = 35 мм. Подставив эти значения (приняв для S максимально возможное с учетом допуска S = 1,2 мм, получим по математическому выражению: R ≥ 56, 41 мм.
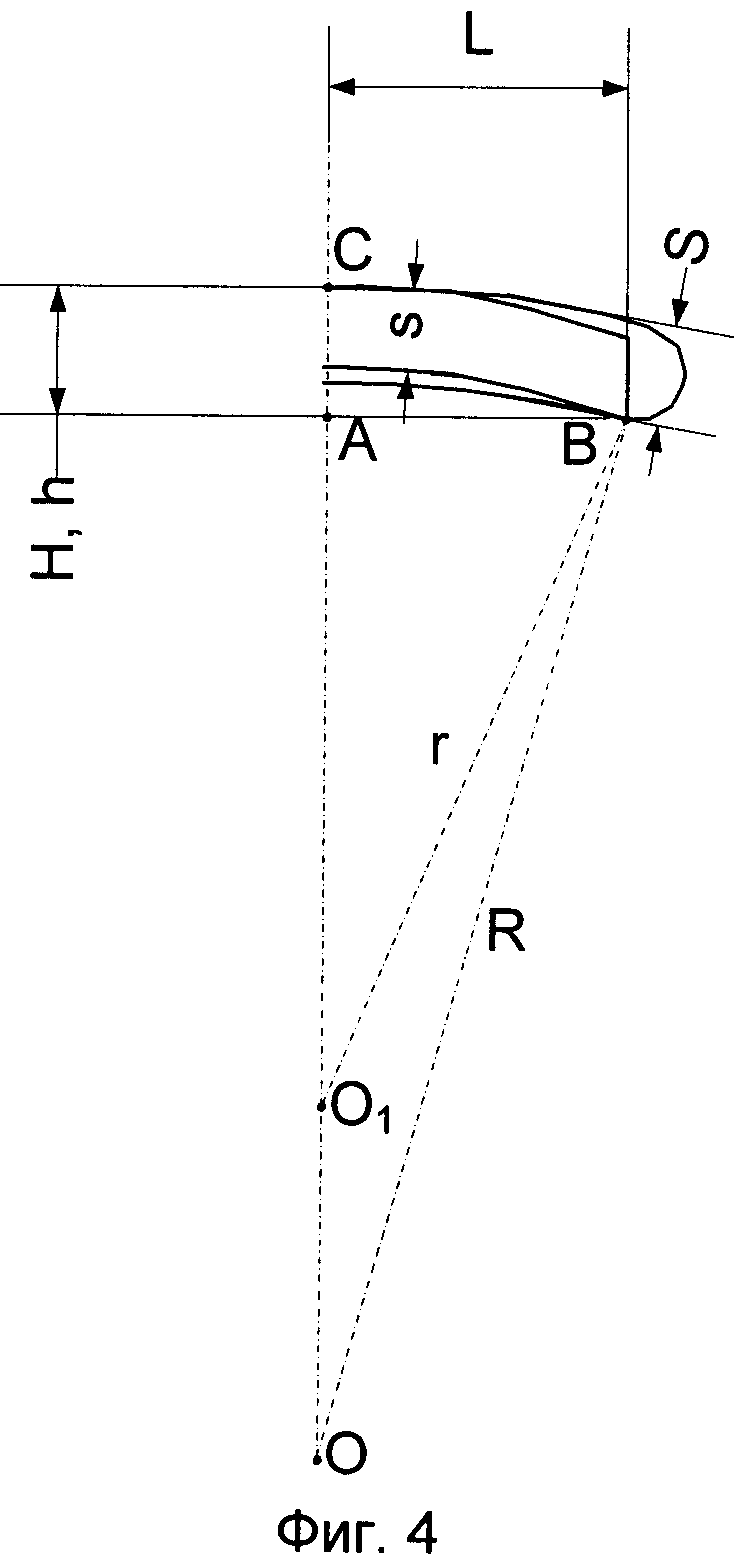
Ниже приведен вывод математической зависимости для первого варианта. На фиг.4 приведена расчетная схема, где точка А - середина хорды внутренней поверхности хвостовика, В - крайняя точка внутренней поверхности хвостовика, О и О1- центры внутренних поверхностей паза 3 и хвостовика 4 соответственно, точка С - точка касания наружной поверхности хвостовика 4 и наружной поверхности паза 3. На фиг.4 приведен случай, когда наружная поверхность хвостовика 4 точно касается (без зазора и натяга) наружной поверхности паза 3.
Тогда расстояние

Примем расстояние AC=h (высота верхней точки профиля наружной поверхности хвостовика 4 над хордой внутренней поверхности хвостовика.

- следует из свойств прямоугольного треугольника O1AB.
Аналогично, приняв расстояние АС - Н (высота верхней точки профиля наружной поверхности паза 3 над хордой внутренней поверхности хвостовика - в общем случае величины Н и h не равны друг другу, но на фиг.4 приведен частный случай равенства), из свойств треугольника ОАВ получим:

очевидно, что условием беззазорного соединения будет неравенство Н ≤ h (4), т.е. хвостовик лопатки, опираясь краями (точка В и вторая, не показанная на фиг.4, но симметричная ей относительно прямой О1О) на внутреннюю поверхность паза 3, своей наружной поверхностью опирается на наружную поверхность паза 3 в точке С.
Подставив в (4) значения Н и h из выражений (3) и (2), получим

Введя обозначение d=S-s, получим, перенеся некоторые члены неравенства:

Введем обозначение  и подставим в (6):
и подставим в (6):

Возведя обе части неравенства в квадрат и приведя подобные члены, получим:

или

Поскольку N - величина положительная (на фиг.4 это расстояние от точки А до внутренней поверхности паза 3, измеренное по прямой ОС), то R ≥N/2+L2/2N (11), откуда, подставив значение N из (7), получим приведенное в формуле изобретения для первого варианта математическое выражение.
Конструкция рабочего колеса осевого вентилятора (второй вариант) в основном схожа с конструкцией рабочего колеса по первому варианту. Отличия в следующем: наружная поверхность 10 хвостовика 4 каждой листовой лопатки 5 выполнена в виде участка кругового цилиндра радиуса RH с образующей, параллельной продольной оси 7 листовой лопатки 5, а наружная поверхность 11 паза 3 каждого основания 2 выполнена в виде участка кругового цилиндра радиуса RH с образующей, параллельной образующей наружной поверхности 10 хвостовика 4 листовой лопатки 5, наружные поверхности 10 хвостовика 4 и 11 паза 3 обращены друг к другу, при этом
где d=S-s, a L - половина ширины хорды хвостовика листовой лопатки по ее наружной поверхности.
Рабочее колесо осевого вентилятора (второй вариант) работает следующим образом: при приведении ступицы 1 во вращение от вала, установленного внутри нее (не показан), листовые лопатки 5 создают поток перекачиваемого газа. При этом за счет выполнения геометрических размеров паза и хвостовика по приведенной в формуле изобретения геометрической зависимости обеспечивается беззазорное соединение хвостовика 4 в пазу 3 - хвостовик 4 имеет три зоны линейного контакта со стенками паза 3 - одна зона контакта по образующей внутренней поверхности хвостовика 4 в середине хвостовика и две зоны контакта по образующим наружной поверхности хвостовика 4 по краям его поперечного сечения. Беззазорное соединение хвостовика с пазом позволяет устранить возможность колебаний лопаток 5 относительно пазов 3, и позволяет обеспечить угловую фиксацию лопатки 5 использованием только одного штифта 6 в каждом соединении хвостовика 4 с пазом 3. При попытке «провернуть» лопатку в угловом направлении относительно оси штифта 6 (за счет сил инерции, реакции потока перекачиваемого газа на лопатку) возникают реакции со стороны указанных трех зон линейного контакта, препятствующие этому перемещению, поскольку такое перемещение сразу вызывает упругие деформации хвостовика 4 лопатки 5, препятствующие такому перемещению. Таким образом, штифт обеспечивает фиксацию лопатки в радиальном направлении, а указанные три зоны линейного контакта - фиксацию лопатки в угловом направлении. Признак «наружные поверхности хвостовика и паза обращены друг к другу» однозначно определяет их взаимное положение, для которого справедливы вышеприведенные выводы и расчетная схема. Теоретически возможно и другое взаимное расположение - когда внутренняя поверхность хвостовика и наружная поверхность паза обращены друг к другу - для него приведенное математическое выражение неприменимо, но такое взаимное расположение не имеет практического смысла, т.к. может быть обеспечено лишь при большой величине d = S-s, что будет сильно снижать аэродинамические характеристики колеса за счет сильной турбулизации потока.
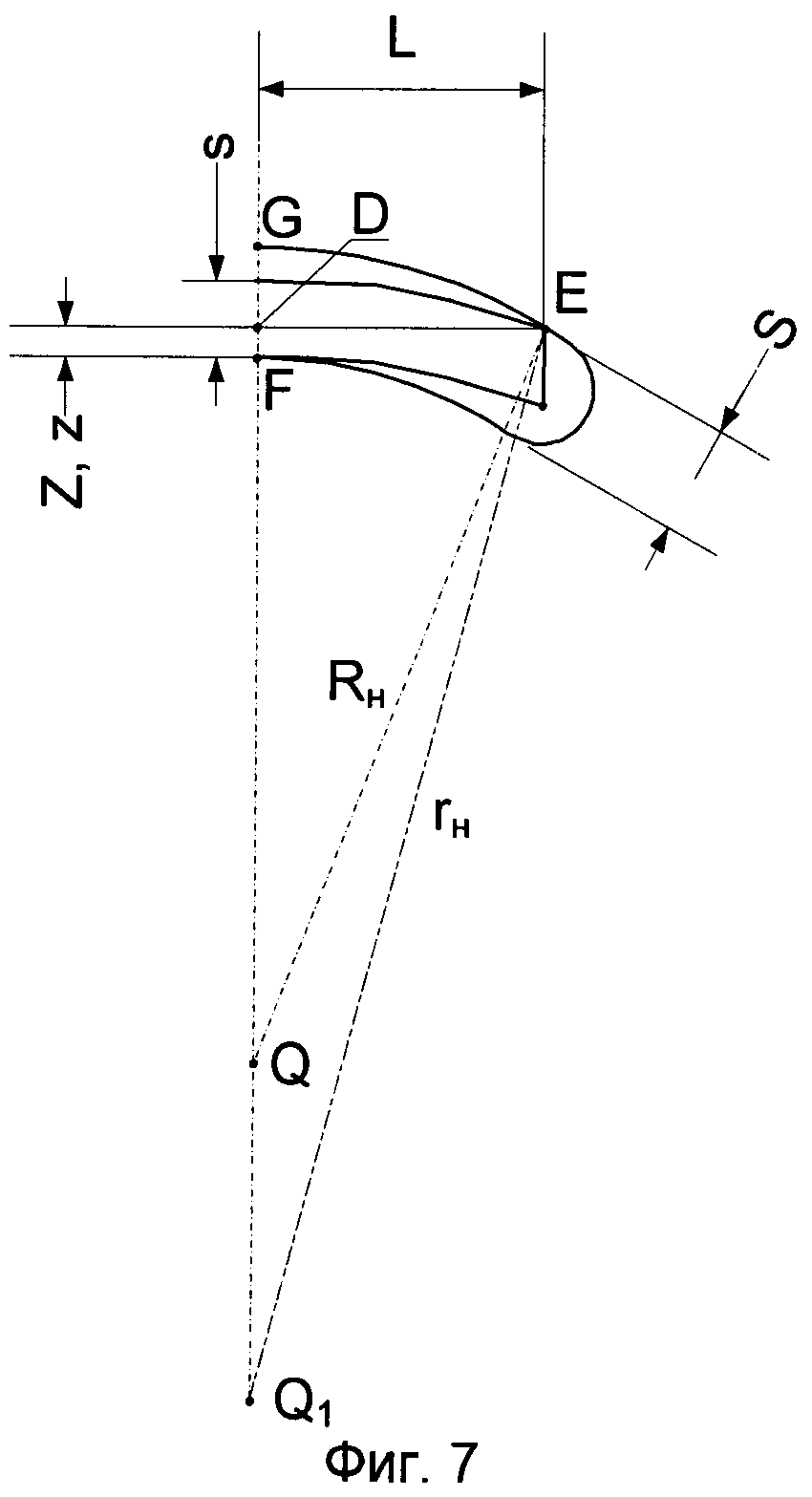
Ниже приведен вывод математической зависимости для второго варианта. На фиг.7 приведена расчетная схема, где точка D -середина хорды наружной поверхности хвостовика, Е - крайняя точка наружной поверхности хвостовика, Q и Q1 - центры наружных поверхностей паза 3 и хвостовика 4 соответственно, точка F - точка касания внутренней поверхности хвостовика 4 и внутренней поверхности паза 3. На фиг.7 приведен случай, когда внутренняя поверхность хвостовика 4 точно касается (без зазора и натяга) внутренней поверхности паза 3.
Тогда расстояние Q1F = rH - s (12)
Примем расстояние FD= z (расстояние от центра профиля внутренней поверхности хвостовика 4 до хорды наружной поверхности хвостовика
 - следует из свойств прямоугольного треугольника Q1ED.
- следует из свойств прямоугольного треугольника Q1ED.
Аналогично, приняв расстояние DF - Z (расстояние от центра профиля внутренней поверхности паза 3 до хорды наружной поверхности хвостовика в общем случае величины Z и z не равны друг другу, но на фиг.7 приведен частный случай равенства), из свойств треугольника QED получим:
 Очевидно, что условием беззазорного соединения будет неравенство Z ≤ z (15), т.е. хвостовик лопатки, опираясь краями (точка Е и вторая, не показанная на фиг.7, но симметричная ей относительно прямой Q1Q) на наружную поверхность паза 3, своей внутренней поверхностью опирается на внутреннюю поверхность паза 3 в точке F.
Очевидно, что условием беззазорного соединения будет неравенство Z ≤ z (15), т.е. хвостовик лопатки, опираясь краями (точка Е и вторая, не показанная на фиг.7, но симметричная ей относительно прямой Q1Q) на наружную поверхность паза 3, своей внутренней поверхностью опирается на внутреннюю поверхность паза 3 в точке F.
Подставив в (15) значения Z и z из выражений (14) и (13), получим

Введя обозначение d-S-s, получим, перенеся некоторые члены неравенства:

Введем обозначение  (18) и подставим в (17):
(18) и подставим в (17):

Возведя обе части неравенства в квадрат и приведя подобные члены, получим:
 ,или
,или

Поскольку М величина положительная (на фиг.4 это расстояние DG),то

откуда, подставив значение М из (18), получим приведенное в формуле изобретения для второго варианта математическое выражение.
В приведенных примерах конкретного исполнения рабочего колеса, как по первому варианту, так и по второму варианту, основания выполнены за одно целое со ступицей в виде фрезерованных выступов на внутренней стороне ступицы. Однако, возможно и крепление лопатки к поворотному (как в прототипе) основанию, поэтому в независимых пунктах формулы изобретения приведен обобщающий признак «основание», которое может быть как элементом ступицы, так и установленной в ней отдельной детали. Также в примерах конкретного исполнения приведен случай, когда вся листовая лопатка выполнена с постоянным по ее длине профилем. Однако заявленное изобретение может быть использовано и в случае разных сечений хвостовика и рабочей части лопатки. Приведенные математические выражения накладывают точный предел только с одной стороны - минимальное значение радиуса внутренней поверхности паза для первого варианта, и максимальное значение радиуса наружной поверхности паза для второго варианта. Конкретное значение этих радиусов определяется методами обычного проектирования, например, исходя из критерия, чтобы при установке хвостовиков в пазы деформации хвостовиков оставались бы упругими.
В результате использования изобретения существенно повышается надежность рабочего колеса, т.к. беззазорное соединение хвостовика с пазом позволяет устранить возможность колебаний лопаток 5 относительно пазов 3. Также повышается и технологичность рабочего колеса за счет обеспечения фиксации лопатки использованием только одного штифта. Указанные преимущества позволяют рекомендовать заявленное техническое решение для использования в изделиях авиационной и космической техники.
Литература
1. Патент РФ №2133383, МПК: F04D 19/00, 1999 г.
2. Патент РФ N 2422681, МПК: F04D 19/02, 2011 г. (прототип).
Способ управления кинетическим моментом космического аппарата с помощью реактивных исполнительных органов
Способ поддержания трехосной ориентации космического аппарата с силовыми гироскопами и целевой нагрузкой
Способ управления положением солнечных батарей космического аппарата и система для его осуществления
Релейный регулятор
Планшет для выбора объектов наблюдения с орбитального космического аппарата
Релейный регулятор
Устройство для стабилизации температуры изделия
Устройство закрытия и последовательного открытия крышки
Способ заправки жидким кислородом баков окислителя ракетно-космической системы (варианты)
Способ измерения объема закрытых и открытых пор пеноматериалов и устройство для его осуществления
Герметизированное устройство
Устройство для перекрытия канала
Дублированный электронасосный агрегат
Электронасосный агрегат
Электронасосный агрегат
Электронасосный агрегат
Устройство деления потока жидкости
Герметизированное устройство

