НАВИГАЦИОННОЕ УСТРОЙСТВО И СПОСОБ ЕГО ПОЗИЦИОНИРОВАНИЯ
Вид РИД
Изобретение
Перекрестная ссылка на родственную патентную заявку
Эта патентная заявка основана на патентной заявке № 097123459 республики Китай (Тайвань), поданной 24 июня 2008 г.
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу позиционирования, а более конкретно к способу позиционирования для навигационного устройства.
Уровень техники
Навигационное устройство снабжает пользователя указаниями для движения по правильным маршрутам, так что пользователь свободен от необходимости постоянно смотреть на карты и следить за дорожными знаками. Однако сигналы глобальной системы позиционирования, на которых большей частью основана навигационная система, могут легко экранироваться зданиями или рельефом земной поверхности, что приводит к плохому качеству приема на определенных участках. В частности, когда число спутников, видимых для навигационного устройства, меньше четырех или когда навигационная система находится в зоне слабого сигнала, навигационное устройство становится неспособным обеспечивать нужные данные для позиционирования. При таких обстоятельствах, даже если сигналы позиционирования принимаются, возможно, что оценки местоположения, вычисленные на основании принятых сигналов глобальной системы позиционирования, будут сильно отличаться от фактических оценок, так что текущее местоположение может быть определено неправильно.
Для повышения точности позиционирования современные исследования в основном сконцентрированы на дифференциальной глобальной системе позиционирования, счислении пути, инерциальных системах навигации и сопоставлении с картой, чтобы обеспечить лучшее решение.
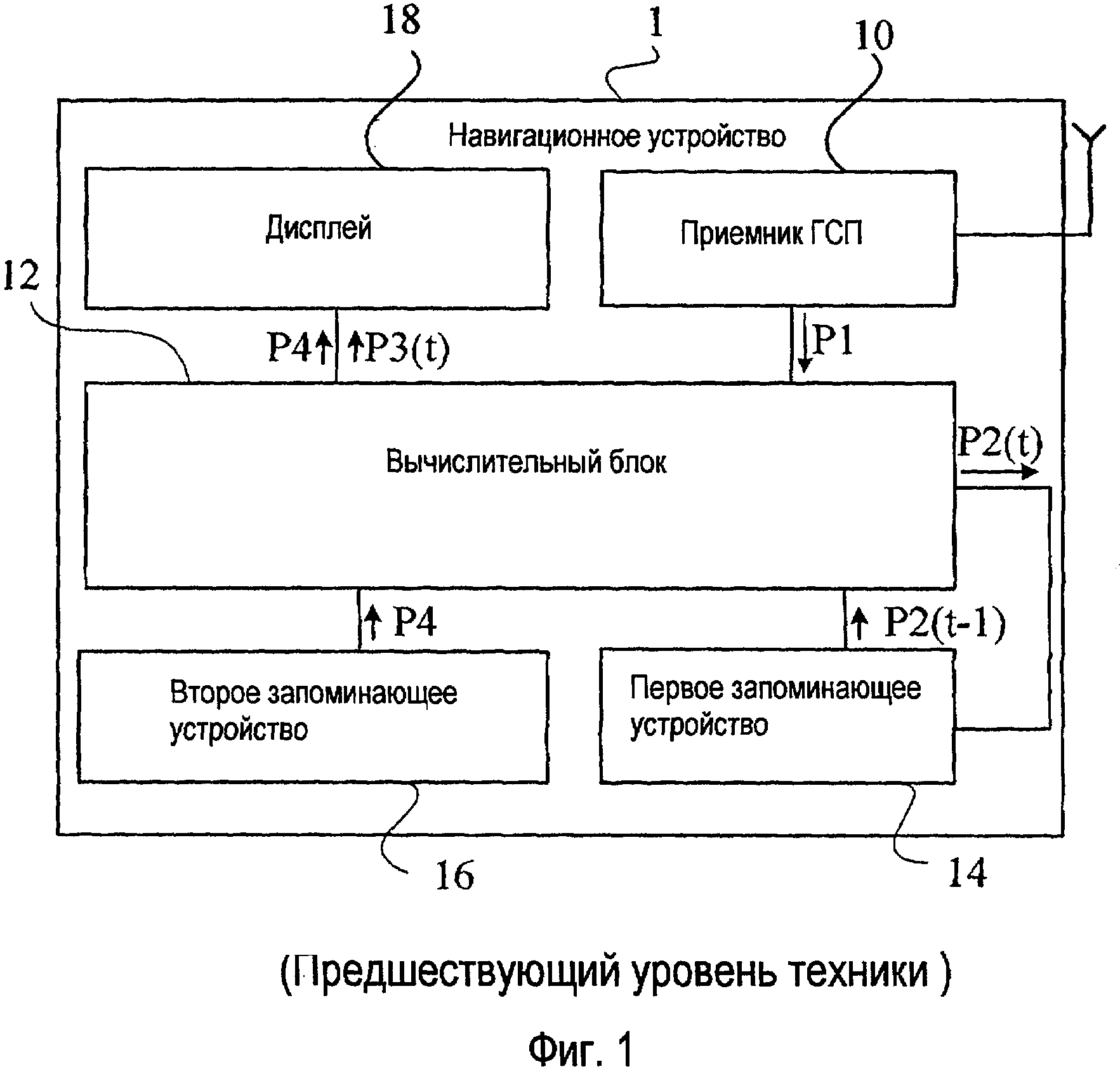
То, каким образом в навигационном устройстве из уровня техники используется функция сопоставления с картой (ММТ) для выполнения вычислений при определении местоположения, будет рассмотрено ниже. Согласно фиг.1, навигационное устройство 1 содержит приемник 10 глобальной системы позиционирования (приемник ГСП), вычислительный блок 12, первое запоминающее устройство 14, второе запоминающее устройство 16 и дисплейное устройство 18. Приемник 10 глобальной системы позиционирования принимает сигнал Р1 глобальной системы позиционирования. В первом запоминающем устройстве 14 сохраняются предшествующие данные P2(t-1) о местоположении, скорости и времени. Следует отметить, что данные о местоположении, скорости и времени содержат информацию относительно местоположения, скорости и временном сдвиге. Во втором запоминающем устройстве 16 сохраняются данные Р4 карты. Вычислительный блок 12 вычисляет текущие данные P2(t) о местоположении, скорости и времени в соответствии с сигналом Р1 глобальной системы позиционирования и предшествующими данными P2(t-1) о местоположении, скорости и времени. Затем в соответствии с данными Р4 карты и вычисленными текущими данными Р2 о местоположении, скорости и времени вычислительный блок 12 вычисляет текущий ММТ результат P3(t). На данном этапе дисплейное устройство 18 воспроизводит данные Р4 карты и текущий ММТ результат P3(t), полученные вычислительным блоком 12.
В алгоритме ММТ операция сопоставления выполняется между данными Р4 карты и текущим параметром P2(t) позиционирования с тем, чтобы прокалибровать текущие данные P2(t) о местоположении, скорости и времени на текущем маршруте и повысить точность позиционирования. Однако, поскольку вычисления местоположения навигационным устройством 1 основаны исключительно на предшествующих данных P2(t-1) о местоположении, скорости и времени и сигнале Р1 глобальной системы позиционирования, и вследствие значительных погрешностей импортированных оценок навигационное устройство 1 вряд ли сможет калибровать текущие данные P2(t) о местоположении, скорости и времени на правильном маршруте, даже если текущие данные P2(t) о местоположении, скорости и времени калибруются с использованием сопоставления с картой (ММТ). Кроме того, поскольку текущие данные P2(t) о местоположении, скорости и времени, полученные в результате вычисления в текущий момент времени, включают в себя определенную степень погрешности, которая учитывается, когда текущие данные P2(t) о местоположении, скорости и времени импортируются в качестве предшествующих данных P2(t-1) о местоположении, скорости и времени, вычисление в следующий момент времени приводит к накапливающимся погрешностям. Точнее, в предшествующем уровне техники в дополнение к вычисленным оценкам, импортируемым навигационным устройством 1, которые не считаются достаточно точными, погрешности также накапливаются с течением времени, так что неправдоподобно, чтобы полученный текущий ММТ результат P3(t) отражал правильный маршрут.
Поэтому в соответствии с настоящим изобретением предлагается навигационное устройство и способ позиционирования на его основе, которые способны повысить точность позиционирования для исключения указанных выше проблем.
Раскрытие изобретения
Задача изобретения заключается в создании способа позиционирования, в котором импортируется предшествующий параметр сопоставления с картой для вычисления текущего параметра позиционирования, чтобы получать более точную оценку местоположения.
В соответствии с одним вариантом осуществления изобретения предложен способ позиционирования для навигационного устройства. Способ содержит этапы, на которых: а) запоминают предшествующий параметр позиционирования и предшествующий параметр сопоставления с картой; b) принимают сигнал позиционирования; с) считывают предшествующий параметр позиционирования и предшествующий параметр сопоставления с картой; и d) вычисляют текущий параметр позиционирования в соответствии с по меньшей мере одним из предшествующего параметра позиционирования и предшествующего параметра сопоставления с картой, а также в соответствии с сигналом позиционирования.
Еще одна задача изобретения заключается в создании навигационной системы, в которой предшествующий параметр позиционирования импортируется для вычисления текущего параметра позиционирования, чтобы получать более точную оценку местоположения.
В соответствии с вариантом осуществления изобретения навигационная система содержит первое запоминающее устройство, приемник глобальной системы позиционирования и вычислительный блок. В первом запоминающем устройстве запоминается предшествующий параметр позиционирования и предшествующий параметр сопоставления с картой. Приемник глобальной системы позиционирования принимает сигнал позиционирования. Вычислительный блок, соединенный с первым запоминающим устройством и приемником глобальной системы позиционирования, считывает предшествующий параметр позиционирования и предшествующий параметр сопоставления с картой и вычисляет текущий параметр позиционирования в соответствии с сигналом позиционирования, предшествующим параметром позиционирования и предшествующим параметром сопоставления с картой.
В уровне техники для вычисления текущего параметра позиционирования требуются предшествующий параметр позиционирования и сигнал позиционирования. Если предположить, что предшествующий параметр позиционирования или сигнал позиционирования отклоняется от фактической оценки местоположения, вычисляемый текущий параметр позиционирования должен отклоняться еще больше от фактической оценки местоположения вследствие накапливающегося отклонения. Поэтому, поскольку параметр сопоставления с картой является вычислительным результатом калибровки и сопоставления с использованием данных карты, согласно изобретению выбирается параметр сопоставления с картой для выполнения вычисления в сочетании с предшествующим параметром позиционирования и сигналом позиционирования, чтобы получать более точный текущий параметр позиционирования. В результате выполнения алгоритма сопоставления с картой (ММТ) получают более точный параметр сопоставления с картой, то есть более точную оценку местоположения. Кроме того, в соответствии с изобретением параметр сопоставления с картой, вычисленный в текущий момент времени, учитывают во время вычисления в следующий момент времени, в результате чего обеспечивается постепенная калибровка навигационного устройства в соответствии с параметром сопоставления с картой, полученным в результате предшествующего вычисления, и тем самым исключается проблема накапливающегося отклонения позиционирования.
Краткое описание чертежей
Настоящее изобретение станет более понятным для специалистов в данной области техники после рассмотрения нижеследующего подробного описания и сопровождающих чертежей, на которых:
фиг.1 - функциональная схема навигационного устройства из уровня техники;
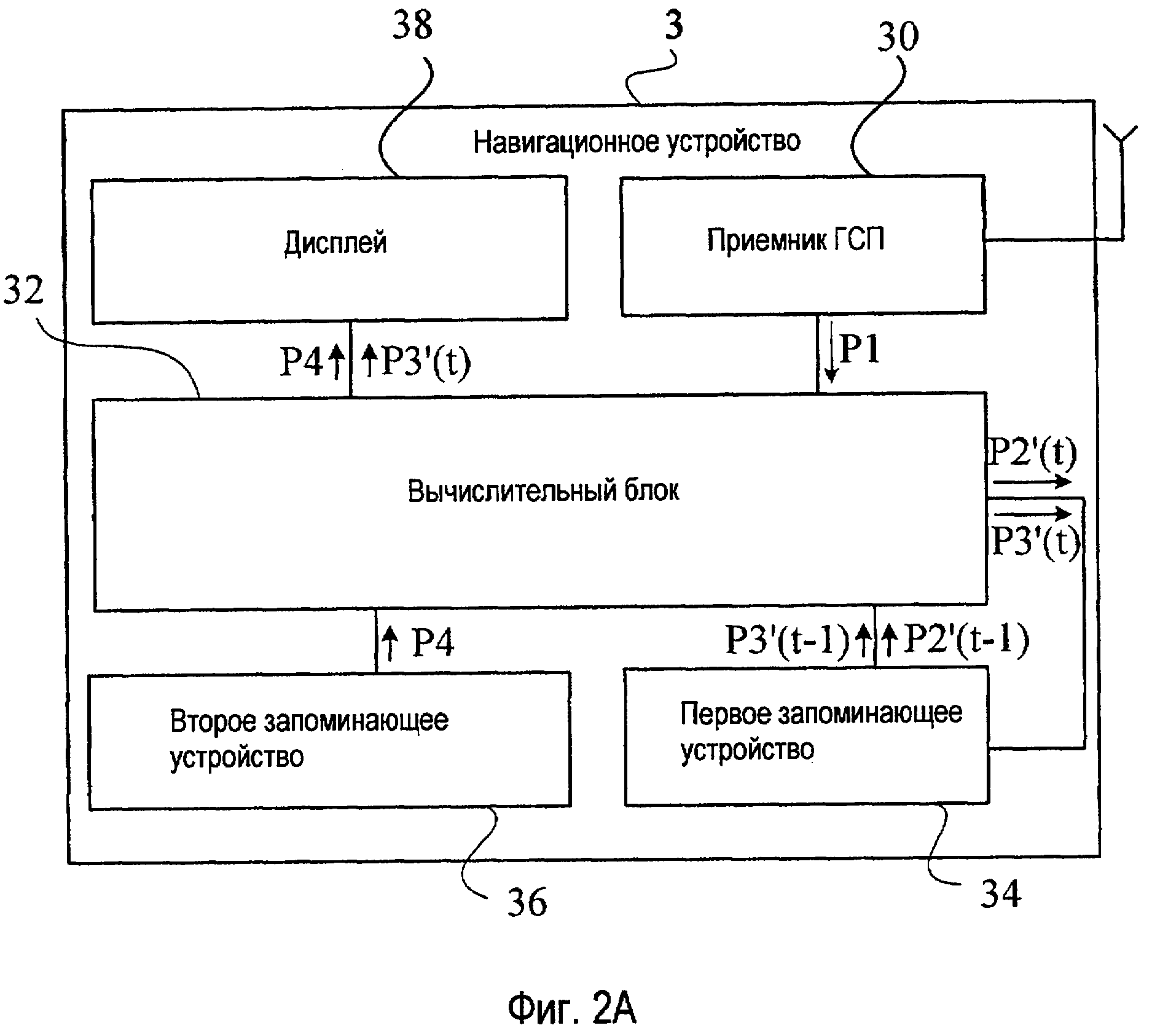
фиг.2А - детальная функциональная схема навигационного устройства согласно одному варианту осуществления изобретения;
фиг.2В - детальная функциональная схема навигационного устройства по фиг.2А;
фиг.3 - блок-схема последовательности операций способа позиционирования согласно одному варианту осуществления изобретения;
фиг.4 - детальная блок-схема последовательности операций этапа S18 по фиг.3;
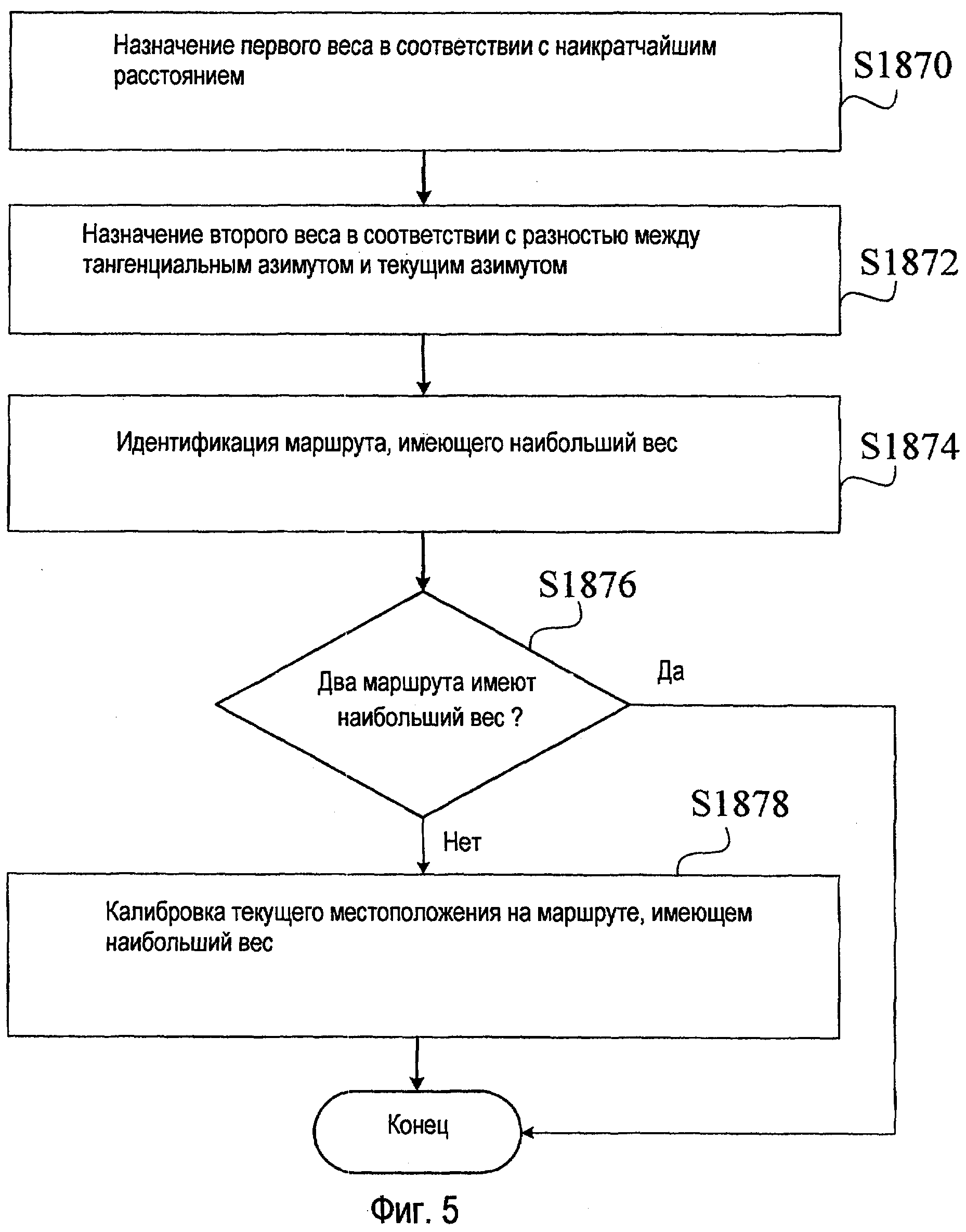
фиг.5 - детальная блок-схема последовательности операций этапа S187 по фиг.4;
фиг.6А - схематичное представление, соответствующее этапу S1870 по фиг.5;
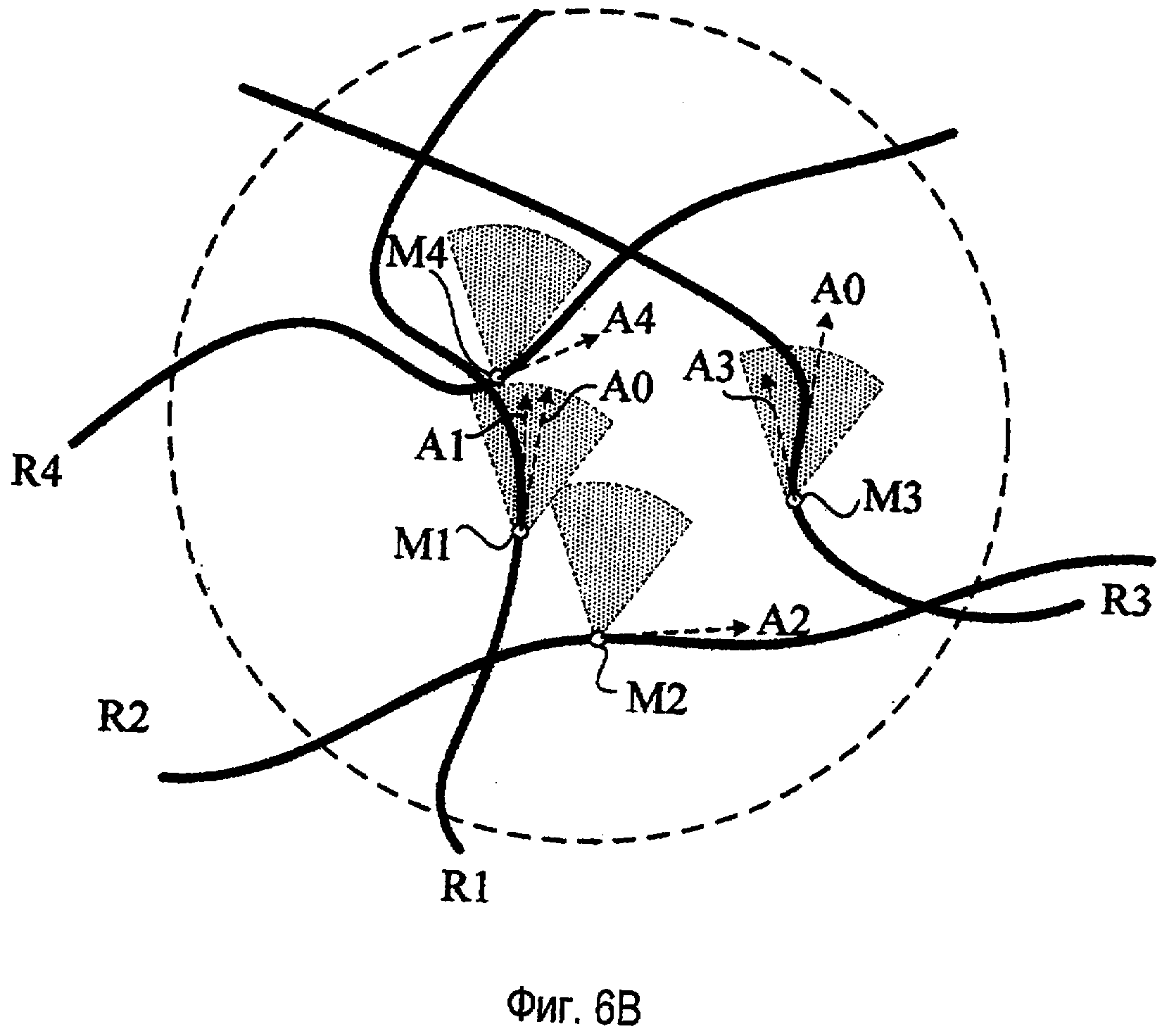
фиг.6В - схематичное представление, соответствующее этапу S1872 по фиг.5.
Осуществление изобретения
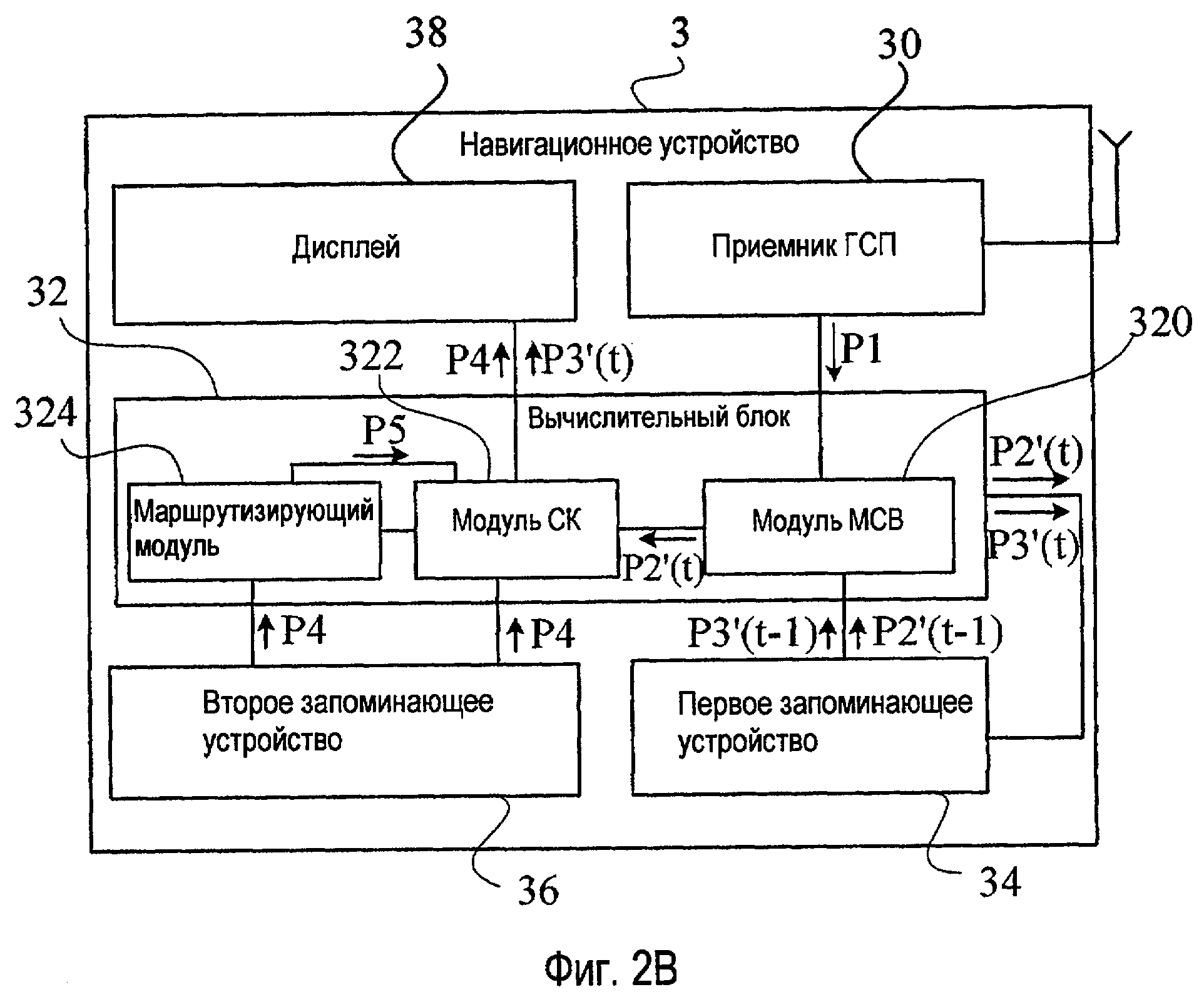
На фиг.2А и 2В показаны структурные схемы навигационного устройства 3 согласно одному варианту осуществления изобретения. Как показано, навигационное устройство 1 содержит приемник 30 глобальной системы позиционирования (приемник ГСП), вычислительный блок 32, первое запоминающее устройство 34, второе запоминающее устройство 36 и дисплейное устройство 38. Навигационное устройство 3 согласно изобретению представляет собой любое электронное устройство, обладающее навигационными возможностями, такое как мобильный телефон глобальной системы позиционирования или портативное навигационное устройство. Навигационное устройство 3 может также содержать независимый приемник глобальной системы позиционирования и электронное устройство, обладающее возможностями обработки данных, такое как приемник глобальной системы позиционирования с беспроводным интерфейсом Bluetooth, снабженный мобильным телефоном, обладающим возможностями интерфейса Bluetooth; то есть приемник глобальной системы позиционирования представляет собой внешнее подключаемое устройство. В мобильном телефоне может выполняться навигационная программа, сохраняемая в его запоминающем устройстве, для осуществления способа позиционирования согласно изобретению на основании сигналов глобальной системы позиционирования, передаваемых с приемника глобальной системы позиционирования с беспроводным интерфейсом Bluetooth.
Приемник 30 глобальной системы позиционирования принимает сигнал Р1 глобальной системы позиционирования. В первом запоминающем устройстве 34 сохраняются предшествующие данные Р2'(t-1) о местоположении, скорости и времени и предшествующий результат Р3'(t-1) сопоставления с картой (ММТ). Во втором запоминающем устройстве 36 сохраняются данные Р4 карты. Вычислительный блок 32 в соответствии с сигналом Р1 глобальной системы позиционирования, предшествующими данными Р2'(t-1) о местоположении, скорости и времени и предшествующим ММТ результатом Р3'(t-1) вычисляет текущие данные Р2'(t) о местоположении, скорости и времени. Затем вычислительный блок 32 в соответствии с данными Р4 карты и полученными текущими данными Р2'(t) о местоположении, скорости и времени вычисляет текущий ММТ результат Р3'(t), который включает в себя текущую оценку местоположения и текущую оценку азимута. На данном этапе дисплейное устройство 38 воспроизводит карту на основании данных Р4 карты и текущего ММТ результата Р3'(t), полученного вычислительным блоком 32. Кроме того, в предположении, что текущие данные Р2'(t) о местоположении, скорости и времени и текущий ММТ результат Р3'(t) являются достоверными, вычислительный блок 32 сохраняет их в первом запоминающем устройстве 34, чтобы получать предшествующие данные Р2'(t-1) о местоположении, скорости и времени и предшествующий ММТ результат Р3'(t-1) для следующего вычисления местоположения.
По сравнению с предшествующим уровнем техники, показанным на фиг.1, в способе согласно изобретению дополнительно учитывают предшествующий ММТ результат Р3'(t-1) при вычислении текущих данных Р2'(t) о местоположении, скорости и времени, так что калибровку выполняют, чтобы получать текущие данные о местоположении, скорости и времени, которые ближе к правильному маршруту. Таким образом, путем вычисления текущего ММТ результата Р3'(t) с обращением к текущим данным Р2'(t) о местоположении, скорости и времени вычисляемый результат определения местоположения делают более точным, используя ММТ результат Р3'(t), который ближе к правильному маршруту. Кроме того, поскольку каждый вычисленный ММТ результат используют при следующем вычислении местоположения, скорости и времени, погрешности позиционирования снижают, чтобы в дальнейшем исключать накапливающиеся погрешности.
На фиг.2В показана детальная структурная схема навигационного устройства 3, показанного на фиг.2А. Вычислительный блок 32 содержит модуль 320 вычисления местоположения, скорости и времени (модуль МСВ) и модуль 322 сопоставления с картой (модуль СК). Модуль 320 вычисления местоположения, скорости и времени, соединенный с первым запоминающим устройством 34 и приемником 30 глобальной системы позиционирования (приемником ГСП), вычисляет текущие данные Р2'(t) о местоположении, скорости и времени в соответствии с сигналом Р1 глобальной системы позиционирования, предшествующими данными Р2'(t-1) о местоположении, скорости и времени и предшествующим результатом Р3'(t-1) сопоставления с картой. Модуль 322 сопоставления с картой, соединенный со вторым запоминающим устройством 36 и модулем 320 вычисления местоположения, скорости и времени, вычисляет текущий результат Р3'(t) сопоставления с картой в соответствии с текущими данными Р2'(t) о местоположении, скорости и времени и данными Р4 карты.
Вычислительный блок 32 может также содержать маршрутизирующий модуль 324, соединенный со вторым запоминающим устройством 36 и модулем 322 сопоставления с картой. Маршрутизирующий модуль 324 в соответствии с заданными пользователем установками, например исходным пунктом, пунктом назначения и требованиями к маршруту, и данными Р4 карты формирует плановый маршрут Р5. В таком случае при условии, что пользователь программирует навигационное устройство 3 для осуществления планирования маршрута, модуль 322 сопоставления с картой также в соответствии с плановым маршрутом Р5 может вычислить текущий результат Р3'(t) сопоставления с картой.
Для лучшего понимания способа позиционирования, реализуемого навигационным устройством 3 согласно изобретению, обратимся к фиг.3, на которой показана блок-схема последовательности операций способа позиционирования согласно одному варианту осуществления изобретения.
Способ позиционирования, реализуемый навигационным устройством 3, включает в себя два основных этапа. На первом этапе вычислительный блок 32 вычисляет текущие данные Р2'(t) о местоположении, скорости и времени с последующей подстановкой текущих данных Р2'(t) о местоположении, скорости и времени в алгоритм сопоставления с картой (ММТ) для получения ММТ результата Р3'(t) на втором этапе. В таком случае дисплейное устройство 38 навигационного устройства 3 воспроизводит текущую оценку местоположения и текущую оценку азимута в текущем ММТ результате Р3'(t).
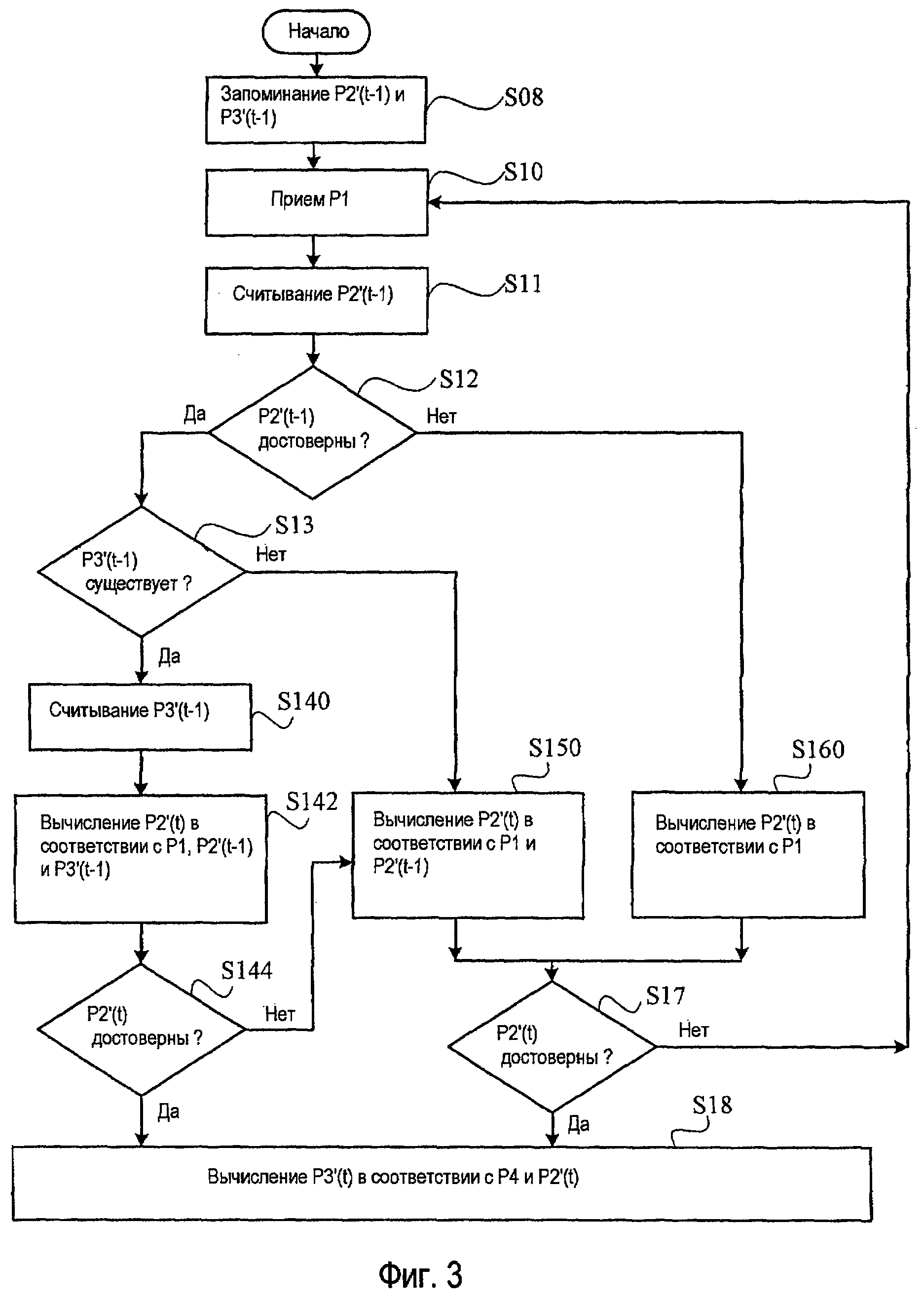
В зависимости от различных обстоятельств текущие данные о местоположении, скорости и времени вычисляют тремя различными способами вычисления в соответствии с: 1) предшествующими данными о местоположении, скорости и времени, результатом сопоставления с картой и сигналом глобальной системы позиционирования; 2) предшествующими данными о местоположении, скорости и времени и сигналом глобальной системы позиционирования; и 3) сигналом глобальной системы позиционирования. Однако для каждого из всех способов вычисления имеются необходимые условия, которые заранее определяются до выполнения последующих вычислений. Обратимся к фиг.3, где способы вычисления текущих данных о местоположении, скорости и времени согласно изобретению содержат этапы, описанные ниже.
После начала предшествующие данные о местоположении, скорости и времени и предшествующий результат сопоставления с картой запоминают на этапе S08.
На этапе S10 принимают сигнал глобальной системы позиционирования.
На этапе S11 считывают предшествующие данные о местоположении, скорости и времени; то есть считывают данные о местоположении, скорости и времени, полученные в результате вычисления в предшествующий момент времени.
На этапе S12 определяют, являются ли достоверными предшествующие данные о местоположении, скорости и времени. Например, определяют, являются ли предшествующие данные о местоположении, скорости и времени достоверными в соответствии с алгоритмом среднеквадратической ошибки и автономным контролем целостности в приемнике.
Когда результат из этапа S12 является отрицательным, то есть предшествующие данные о местоположении, скорости и времени являются недостоверными, выполняют этап S160. На этапе S160 текущие данные о местоположении, скорости и времени вычисляют в соответствии с сигналом глобальной системы позиционирования, как в третьем способе вычисления текущих данных о местоположении, скорости и времени, определенном выше. На практике текущие данные о местоположении, скорости и времени вычисляют в соответствии с сигналом глобальной системы позиционирования, используя способ наименьших квадратов.
Когда результат из этапа S12 является положительным, то есть предшествующие данные о местоположении, скорости времени являются достоверными, выполняют этап S13. На этапе S13 определяют, имеется ли предшествующий результат сопоставления с картой (ММТ), который является ММТ результатом, полученным на основании вычисления в предшествующий момент времени. В случае, когда предшествующий ММТ результат отсутствует, выполняют этап S150, на котором текущие данные о местоположении, скорости и времени вычисляют в соответствии с предшествующими данными о местоположении, скорости и времени и сигналом глобальной системы позиционирования, как во втором способе вычисления текущих данных о местоположении, скорости и времени, определенном выше.
Когда результат из S13 является положительным, то есть предшествующий ММТ результат имеется, выполняют этап S140 для считывания предшествующего ММТ результата с последующим выполнением этапа S142. На этапе S142 текущие данные о местоположении, скорости и времени вычисляют в соответствии с предшествующими данными о местоположении, скорости и времени, предшествующим результатом сопоставления с картой и сигналом глобальной системы позиционирования, как в первом способе вычисления данных о местоположении, скорости и времени, определенном выше. Например, в соответствии с сигналом глобальной системы позиционирования, предшествующей скоростью и предшествующим временным сдвигом из предшествующих данных о местоположении, скорости и времени, и предшествующей оценкой ММТ местоположения, и предшествующей оценкой ММТ азимута из предшествующего ММТ результата вычисляют текущие данные о местоположении, скорости и времени, используя калмановскую фильтрацию.
После выполнения второго или третьего способа вычисления текущих данных о местоположении, скорости и времени, то есть после выполнения этапа S150 или этапа S160, выполняют этап S17 для определения, являются ли достоверными текущие данные о местоположении, скорости и времени. Аналогично способу определения в приведенном выше описании, являются ли достоверными текущие данные о местоположении, скорости и времени, в соответствии с алгоритмом среднеквадратической ошибки и автономным контролем целостности в приемнике определяют, являются ли достоверными текущие данные о местоположении, скорости и времени. В случае, когда текущие данные о местоположении, скорости и времени являются недостоверными, выполнение действий возвращают к этапу S10 для повторного начала еще одного вычисления до тех пор, пока все получаемые текущие данные о местоположении, скорости и времени не будут достоверными для последующих алгоритмов сопоставления с картой. В случае, когда текущие данные о местоположении, скорости и времени являются достоверными, выполняют этап S18 для избирательного вычисления текущего ММТ результата в соответствии с данными карты и текущими данными о местоположении, скорости и времени; то есть затем могут выполняться ММТ алгоритмы.
Кроме того, после выполнения этапа S142 из первого способа вычисления текущих данных о местоположении, скорости и времени выполняют этап S144 для определения, являются ли текущие данные о местоположении, скорости и времени достоверными. В случае, когда текущие данные о местоположении, скорости и времени являются недостоверными, выполнение действий возвращают к этапу S150, при этом для краткости описание последующих этапов опускается. В случае, когда текущие данные о местоположении, скорости и времени являются достоверными, выполняют этап S18 для избирательного вычисления текущего ММТ результата в соответствии с данными карты и текущими данными о местоположении, скорости и времени; то есть затем могут выполняться ММТ алгоритмы.
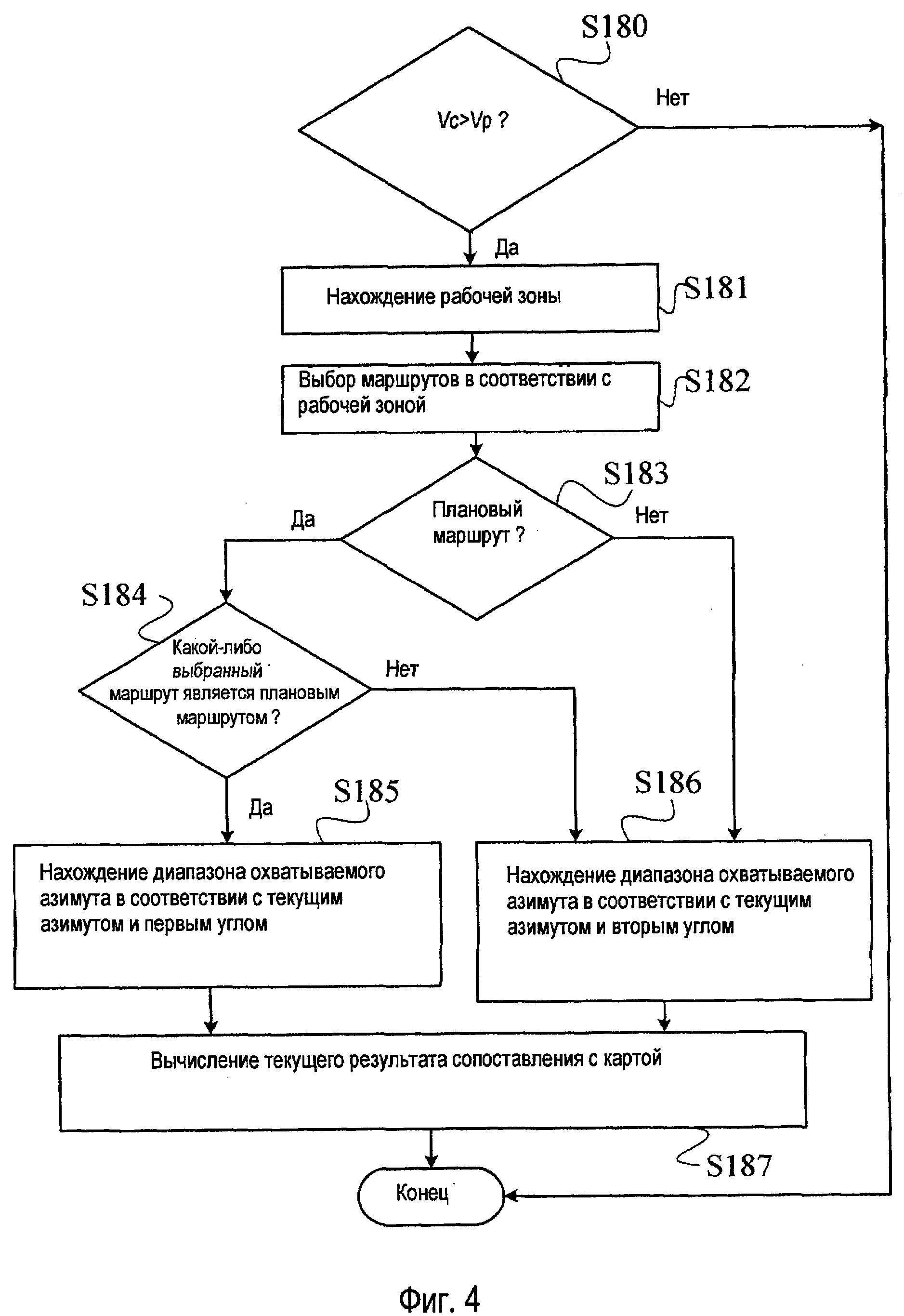
Последовательность действий для вычисления текущих данных о местоположении, скорости и времени в способе позиционирования является такой, какая рассмотрена выше. Для вычисления текущего ММТ результата, который служит для вычисления конечного результата местоположения, текущие данные о местоположении, скорости и времени необходимо подставлять в ММТ алгоритм. Последовательность операций ММТ алгоритма, точнее этап S18, будет описана подробно в описании ниже со ссылкой на фиг.4, на которой показана подробная последовательность операций этапа S18 из фиг.3.
В ММТ алгоритме сначала выполняют этап S180 для определения, является ли скорость потока текущих данных о местоположении, скорости и времени больше, чем заранее заданная скорость. Когда результат из этапа S180 является отрицательным, то есть когда текущая скорость слишком малая, текущий ММТ результат не должен вычисляться, поскольку предшествующий ММТ результат является непригодным в качестве базисного при реализации способа позиционирования в следующий момент времени.
Когда результат из этапа S180 является положительным, то есть когда текущая скорость из текущих данных о местоположении, скорости и времени больше, чем заранее заданная скорость, выполняют этап S181 для нахождения рабочей зоны в соответствии с текущим местоположением и заранее заданным радиусом. На этапе S182 множество маршрутов выбирают из данных карты в соответствии с рабочей зоной. В выбранных маршрутах учитывают результат последующего взвешивающего вычисления, в котором принимают во внимание расстояния между маршрутами и текущим местоположением и разности между азимутами маршрутов и текущим азимутом. Заявитель отмечает, что чем меньше разности, тем более вероятно соответствие текущего местоположения конкретному маршруту.
Затем выполняют этап S183 для определения, имеется ли плановый маршрут; то есть определяют, запланирован ли в навигационном устройстве 3 маршрут в соответствии с заданными пользователем установками. Когда результат из этапа S183 является положительным, это означает, что плановый маршрут имеется. Когда результат является отрицательным, выполняют этап S186, чтобы определить диапазон охватываемого азимута в соответствии с текущим азимутом и вторым углом.
Когда на этапе S183 определяют, что плановый маршрут имеется, выполняют этап S814, чтобы определить, не является ли какой-либо из маршрутов плановым маршрутом. Когда результат из этапа S184 является положительным, выполняют этап S185, чтобы найти диапазон охватываемого азимута в соответствии с текущим азимутом и первым углом, при этом из расстояния между текущим местоположением и плановым маршрутом вычитают заранее заданный отрезок. При обычных обстоятельствах пользователь движется по направлению планового маршрута, обеспечиваемого навигационным устройством. Чтобы максимально согласовать текущее местоположение с плановым маршрутом, не только имеют расстояние между текущим местоположением и плановым маршрутом за вычетом заранее заданного отрезка, но и повышают допустимость ошибок текущего азимута, так что плановый маршрут является доминирующим при последующем взвешивающем вычислении. Поэтому на этапе S185 и этапе S186 первый угол больше, чем второй угол.
На этапе S185 и этапе S186 определяют расстояния между текущим местоположением и маршрутами и диапазон охватываемого азимута. Затем выполняют этап S817 для вычисления текущего ММТ результата в соответствии с расстояниями между текущим местоположением и маршрутами, диапазоном охватываемого азимута и текущими азимутами маршрутов, чтобы завершить ММТ алгоритм.
На фиг.5, 6А и 6В показаны подробности ММТ алгоритма, согласно которому текущий ММТ результат вычисляют в соответствии с расстояниями между текущим местоположением и маршрутами, диапазоном охватываемого азимута и азимутами маршрутов. На фиг.5 показана подробная блок-схема последовательности операций этапа S187 из фиг.4. На фиг.6А и 6В показаны схематические представления, соответствующие этапу S1870 и этапу S1872 из фиг.5, соответственно.
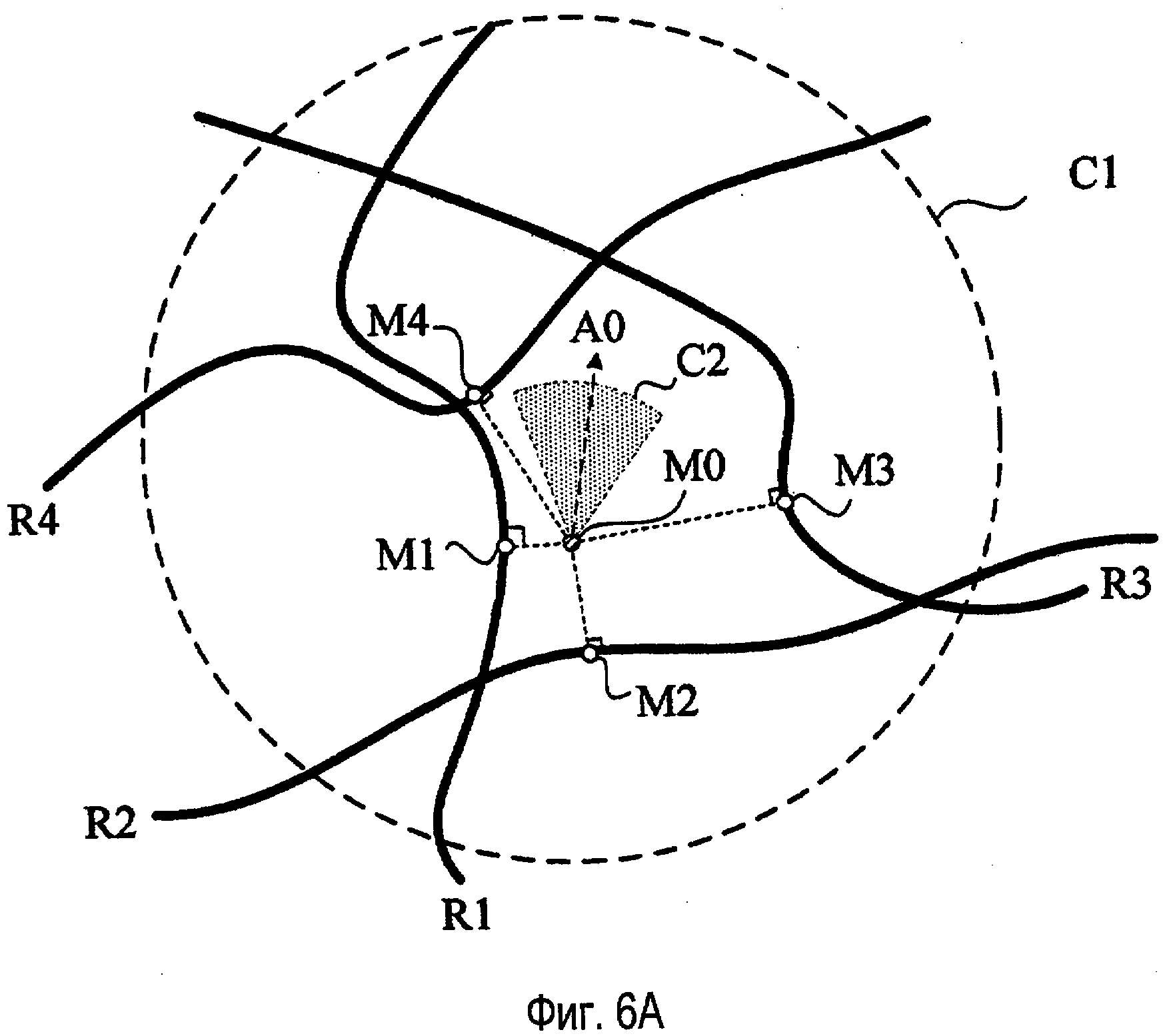
На этапе S182 в соответствии с рабочей зоной С1 множество маршрутов выбирают на основании данных карты, таких как маршруты R1, R2, R3 и R4 на фиг.6А.
Сначала выполняют этап S1870, на котором каждому из маршрутов назначают первый вес согласно соответствующему наикратчайшему расстоянию между маршрутами и текущим местоположением. Например, что касается фиг.6А, то в соответствии с расстояниями между текущим местоположением М0 и местоположениями М1, М2, М3 и М4 на маршрутах каждому из маршрутов R1, R2, R3 и R4 назначают первый вес, при этом чем короче расстояние, тем больший вес назначают. Предположительно, маршрут R3 является плановым маршрутом. В этом варианте осуществления маршруту R1 исходно назначают наибольший вес, поскольку расстояние между местоположением М1 и текущим местоположением М0 является наикратчайшим. Однако на этапе S185 из расстояния между местоположением М0 и местоположением М3 вычитают заранее определенный отрезок, и маршрут R3 в результате этого имеет больший вес вследствие уменьшенного расстояния между местоположением М0 и местоположением М3. Точнее, вероятно, что маршрут R3 будет иметь больший первый вес, чем маршрут R1, после вычитания заранее заданного отрезка из маршрута R3.
На следующем этапе S1872 определяют, являются ли тангенциальные азимуты с А1 по А4 на местоположениях с М1 по М4 на маршрутах находящимися в пределах рабочей зоны С2, и каждому из маршрутов с R1 по R4 назначают второй вес в соответствии с разностями между тангенциальными азимутами с А1 по А4 и текущим азимутом А0. Что касается фиг.6В, то тангенциальными азимутами маршрутов R1, R2, R3 и R4 на местоположениях М1, М2, М3 и М4 являются А1, А2, А3 и А4, соответственно. Рабочую зону С2 сопоставляют с помощью тангенциальных азимутов. Поскольку тангенциальные азимуты А2 и А4 не находятся в пределах рабочей зоны С2, маршруты R2 и R4 исключают при условии, что второй вес их равен нулю. Согласно соответствующим разностям между тангенциальными азимутами А1 и А3 и текущим азимутом А0 назначают второй вес маршрутам R1 и R3. В этом варианте осуществления, как показано на фиг.6В, тангенциальный азимут А1 ближе к указателю текущего азимута А0, и поэтому маршруту R1 назначают больший второй вес.
Затем выполняют этап S1874. На этапе S1784 в соответствии с первым весом и вторым весом из всех маршрутов идентифицируют маршрут, имеющий наибольший вес. Принимая во внимание первый и второй веса, маршруты R1, R2, R3 и R4 распределяют последовательно согласно соответствующим весам и идентифицируют маршрут, имеющий наибольший вес.
На следующем этапе S1876 определяют, имеют ли два или большее количество маршрутов наибольший вес. Когда результат из этапа S1876 является положительным, ММТ алгоритм завершают; то есть чтобы исключить выбор ошибочного маршрута, выбор между двумя маршрутами, имеющими наибольший вес, не делают. Когда результат является отрицательным, это означает, что маршрут, имеющий наибольший вес, идентифицирован, и этап S1878 выполняют для калибровки текущего местоположения на маршруте, имеющем наибольший вес. Калиброванную оценку местоположения используют для текущей оценки ММТ местоположения из текущего ММТ результата, а азимут маршрута, имеющего наибольший вес, используют для текущей оценки ММТ азимута из текущего ММТ результата, чтобы завершить ММТ алгоритм. Что касается фиг.6В, то в предположении, что маршрут R1 имеет наибольший вес, текущее местоположение калибруют относительно местоположения М1. Более точно, текущую оценку ММТ местоположения калибруют относительно долготы и широты местоположения М1 и текущую оценку ММТ азимута калибруют относительно тангенциального азимута А1 на местоположении М1 на маршруте R1.
В предшествующем уровне техники для вычисления текущих данных о местоположении, скорости и времени требуются предшествующие данные о местоположении, скорости и времени и сигнал глобальной системы позиционирования. В предположении, что существует отклонение местоположения предшествующих данных о местоположении, скорости и времени или сигнала глобальной системы позиционирования от фактической оценки местоположения, вычисляемые текущие данные о местоположении, скорости и времени должны отклоняться даже еще больше от фактической оценки местоположения вследствие накапливающегося отклонения. В продолжение предшествующего описания следует отметить, что поскольку ММТ результат является вычислительным результатом калибровки и сопоставления с использованием данных карты, то в изобретении принимается ММТ для выполнения вычисления в сочетании с предшествующими данными о местоположении, скорости и времени и сигналом глобальной системы позиционирования, чтобы получать более точные текущие данные о местоположении, скорости и времени. В последующем ММТ алгоритме получают более точный ММТ результат, то есть более точную оценку местоположения. Кроме того, в соответствии с изобретением ММТ результат, вычисляемый в текущий момент времени, учитывают при вычислении в следующий момент времени, в результате чего делается возможной постепенная калибровка навигационного устройства в соответствии с ММТ результатом, полученным в результате предшествующего вычисления, и тем самым исключается проблема накапливающегося отклонения местоположения.
Хотя изобретение было описано на примере считающихся в настоящее время наиболее полезными и предпочтительными вариантами осуществления, следует понимать, что нет необходимости ограничивать изобретение приведенными выше вариантами осуществления. Напротив, предполагается, что оно охватывает различные модификации и аналогичные устройства, включенные в рамки сущности и объема прилагаемой формулы изобретения, которая должна быть истолкована в соответствии с самой широкой интерпретацией с тем, чтобы охватывать все такие модификации и аналогичные структуры.