Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПОВЫШЕНИЯ СТАБИЛЬНОСТИ РАБОТЫ КАВИТАТОРА
Вид РИД
Изобретение
Изобретение относится к области электротехники и эксплуатации систем с асинхронным электродвигателем и частотным регулятором, в частности к регулированию скорости вращения и предотвращению критических режимов работы.
Известно техническое решение по патенту №2416853, МПК H02J 3/01, RU, СПОСОБ СНИЖЕНИЯ УРОВНЯ ВЫСШИХ ГАРМОНИК. Способ может быть использован в системах электроснабжения промышленных предприятий с неизменной нагрузкой за счет размещения дополнительных реакторов, представляющих большое сопротивление для высших гармоник, в электрической сети. Поскольку сеть содержит как индуктивные, так и емкостные элементы, то предлагаемый способ основан на изменении амплитудно-частотной характеристики узла сети.
Достоинством является снижение влияния высших гармоник на электрооборудование.
Однако недостатком способа является невозможность проведения анализа изменения характеристик высших гармоник, а, следовательно, корректировку и оптимизацию режимов работы электрооборудования.
Известно техническое решение по патенту №2427937, МПК G21C 17/00, RU, СПОСОБ ДИАГНОСТИКИ ВОЗНИКНОВЕНИЯ МЕЖКАНАЛЬНОЙ НЕУСТОЙЧИВОСТИ В РЕАКТОРЕ С ВОДОЙ ПОД ДАВЛЕНИЕМ. Способ относится к ядерной энергетике, в частности к области контроля теплоносителя в активной зоне реактора с водой под давлением, и предназначено для контроля возникновения межканальной неустойчивости (регулярных пульсаций расхода) в активной зоне в режиме реального времени. Регистрируют сигналы с внезонных датчиков нейтронного потока (ионизационных камер). Зарегистрированный сигнал нейтронного потока преобразуют в сигнал нейтронной мощности, раскладывают его в частотный спектр, выявляют гармонический ряд с известной частотой основной гармоники, характеризующий возникновение межканальной неустойчивости путем амплитудно-частотной дискриминации. По заранее известной зависимости от уровня мощности реактора автоматическим изменением уровня амплитудной дискриминации пропорционально уровню спектрального шума в измерительном тракте, в случае выявления ненулевых амплитуд в спектре сигнала мощности, формируют диагностирующий сигнал "Возникновение межканальной неустойчивости", который передают на вход системы управления реактора.
Достоинством является снижение вероятности ложных срабатываний.
Однако способ обеспечивается большим количеством датчиков, что материалоемко.
Известно техническое решение по патенту №2413140, МПК F24J3/00, RU, СПОСОБ НАГРЕВА ТЕХНОЛОГИЧЕСКИХ ЖИДКОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. Способ нагрева технологических жидкостей включает прохождение жидкости в зазоре между ротором и статором и последующее преобразование полученной энергии в тепловую, при этом, с целью снижения потребляемой мощности и регулирования процессом нагрева жидкостей с различной вязкостью, нагрев осуществляют в режиме автоколебаний, определяя режимы обработки из зависимости:
BT=2·np·h2·Z·ν-1,
где ВТ - отношение критериев Рейнольдса (Re) и Струхаля (Str), ВТ 8600;
np - число оборотов ротора, с-1;
h - глубина отверстий на роторе, м;
Z - число отверстий на роторе;
ν - кинематическая вязкость обрабатываемой среды, м2/с,
и контролируют наступление автоколебательного процесса по величине падения потребляемой аппаратом мощности в среднем на 20-30%.
Способ регулирования процессом нагрева при использовании сред с различной вязкостью проводят, изменяя глубину отверстий на роторе.
Однако способ не обеспечивает максимальной эффективности нагрева технологических жидкостей, так как максимальная эффективность нагрева достигается при скоростях вращения ротора кавитатора, близких к критическим, а при критической скорости вращения ротора происходит срыв потока и резкое падение эффективности нагрева.
Механическое регулирование не позволяет автоматически поддерживать максимально эффективную скорость вращения ротора кавитатора и предотвращать срыв потока жидкости.
Техническим результатом заявляемого способа является повышение надежности кавитатора, обеспечение поддержания его устойчивой работы путем коррекции режима работы в случае обнаружения признака, свидетельствующего о приближении возникновения срыва потока - изменения скорости вращения электродвигателя.
Поставленная цель достигается следующим образом. Способ управления процессом повышения стабильности работы кавитатора включает прохождение жидкости в зазоре между ротором и статором и последующее преобразование полученной энергии в тепловую, регулирование процесса нагрева, при этом производят фиксацию анализатором всех характеристик электроэнергии, поступающей к электродвигателю, подают сигнал на электронный блок управления, который вычисляет коэффициент К (для нечетных гармоник) по формуле:

где К - программный коэффициент для блока управления, характеризующий режим работы кавитатора;
V - величина напряжения гармоники;
n, m - порядковый номер гармоники (где n>m, 3≤n, 1≤m≤n-2);
- сравнивают полученное значение коэффициента с заложенным программным эталоном:
- при К < эталонного значения электронный блок управления подает сигнал на частотный регулятор, который ↑ увеличивает скорость вращения электродвигателя,
- при К > эталонного значения электронный блок управления подает сигнал на частотный регулятор, который ↓ уменьшает скорость вращения электродвигателя
Способ осуществляется следующим образом. При включении источника питания (6) напряжением 380 V подают питание на частотный регулятор (5), который запускает электродвигатель (2), приводящий во вращение ротор кавитатора (1). Фиксируют анализатором (3) все характеристики электроэнергии, поступающей к электродвигателю (2), и подают сигнал на блок управления (4). Блок управления, с дискретностью 0,01 сек, вычисляет коэффициент К (для рассмотрения нечетных гармоник) по формуле
,
где К - программный коэффициент для блока управления,
характеризующий режим работы кавитатора;
V - величина напряжения гармоники;
n, m - порядковый номер гармоники (n>m, 3≤n, 1≤m≤n-2).
Величину рассчитанного коэффициента К сравнивают со значением заложенного программного эталона:
- при К < эталонного значения электронный блок управления подает сигнал на частотный регулятор, который ↑ увеличивает скорость вращения электродвигателя,
-при К > эталонного значения электронный блок управления подает сигнал на частотный регулятор, который ↓ уменьшает скорость вращения электродвигателя.
1. Пример реализации способа:
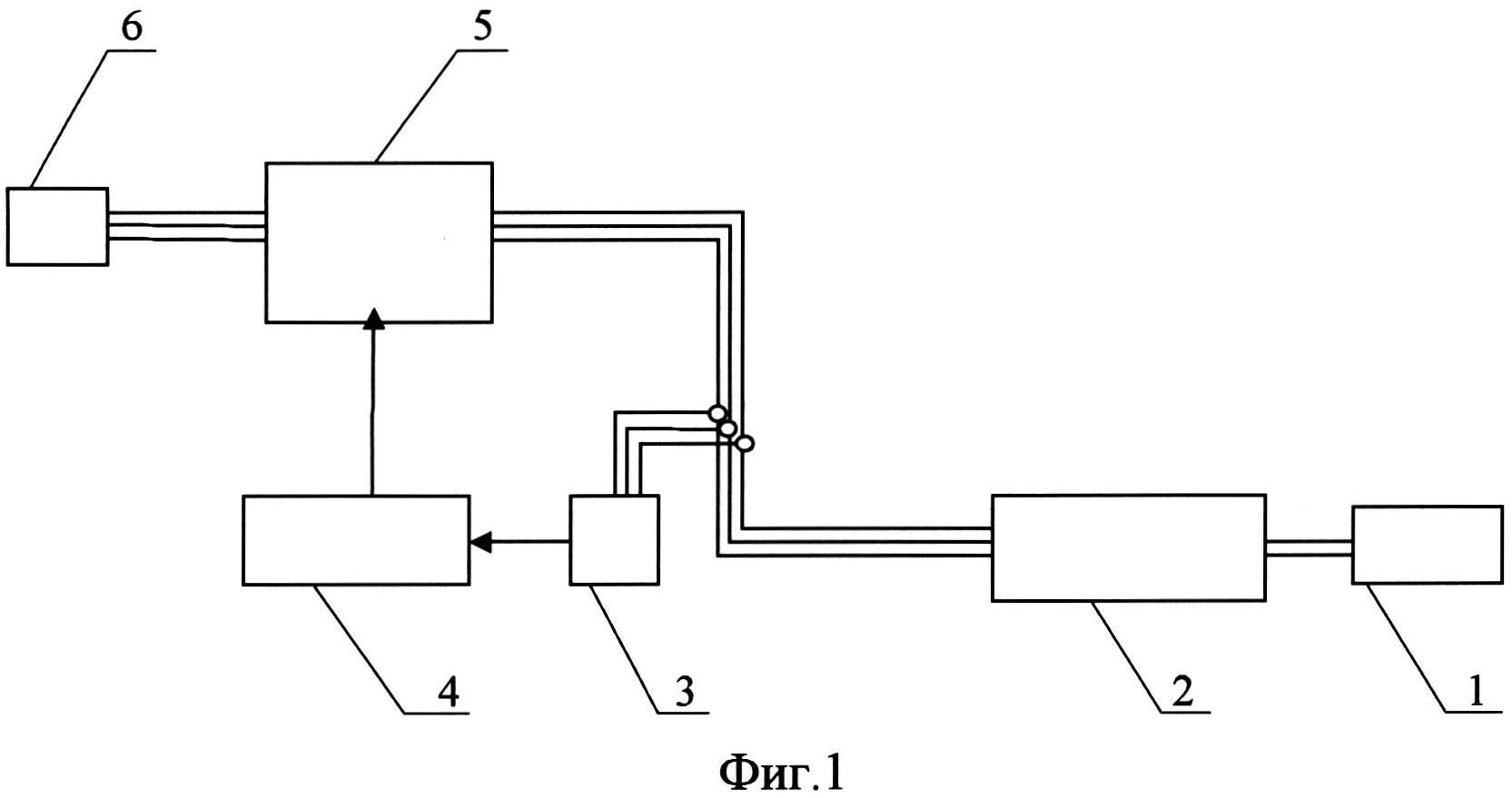
Схема устройства для реализации заявляемого способа представлена на Фиг.1, где:
1. Кавитатор;
2. Электродвигатель;
3. Анализатор;
4. Электронный блок управления;
5. Частотный регулятор;
6. Источник питания.
Кавитатор 1 для оптимальной работы должен поддерживать определенную (оптимальную) частоту вращения ротора, при увеличении этой частоты до определенного предела может наблюдаться срыв потока жидкости, что резко снижает эффективность нагрева, для восстановления нормального режима работы необходима полная остановка кавитатора для полного заполнения жидкостью.
Для того чтобы оптимизировать рабочий процесс, в схему включен анализатор 3 высших гармоник в электросети, частотный регулятор 5 скорости вращения электродвигателя 2 и электронный блок управления. 4.
Когда режим работы кавитатора 1 приближается к критическому, параметры работы электродвигателя 2 становятся иными и вольтамперные характеристики высших гармоник электрической сети резко меняются. В электронный блок управления 4 поступает соответствующий сигнал с анализатора 3 высших гармоник в электросети, и тот в свою очередь подает управляющий сигнал на частотный регулятор 5, который уменьшает частоту вращения электродвигателя 2. Соответственно уменьшается частота вращения ротора кавитатора 1, в результате процесс нагрева жидкости нормализуется без остановки оборудования.
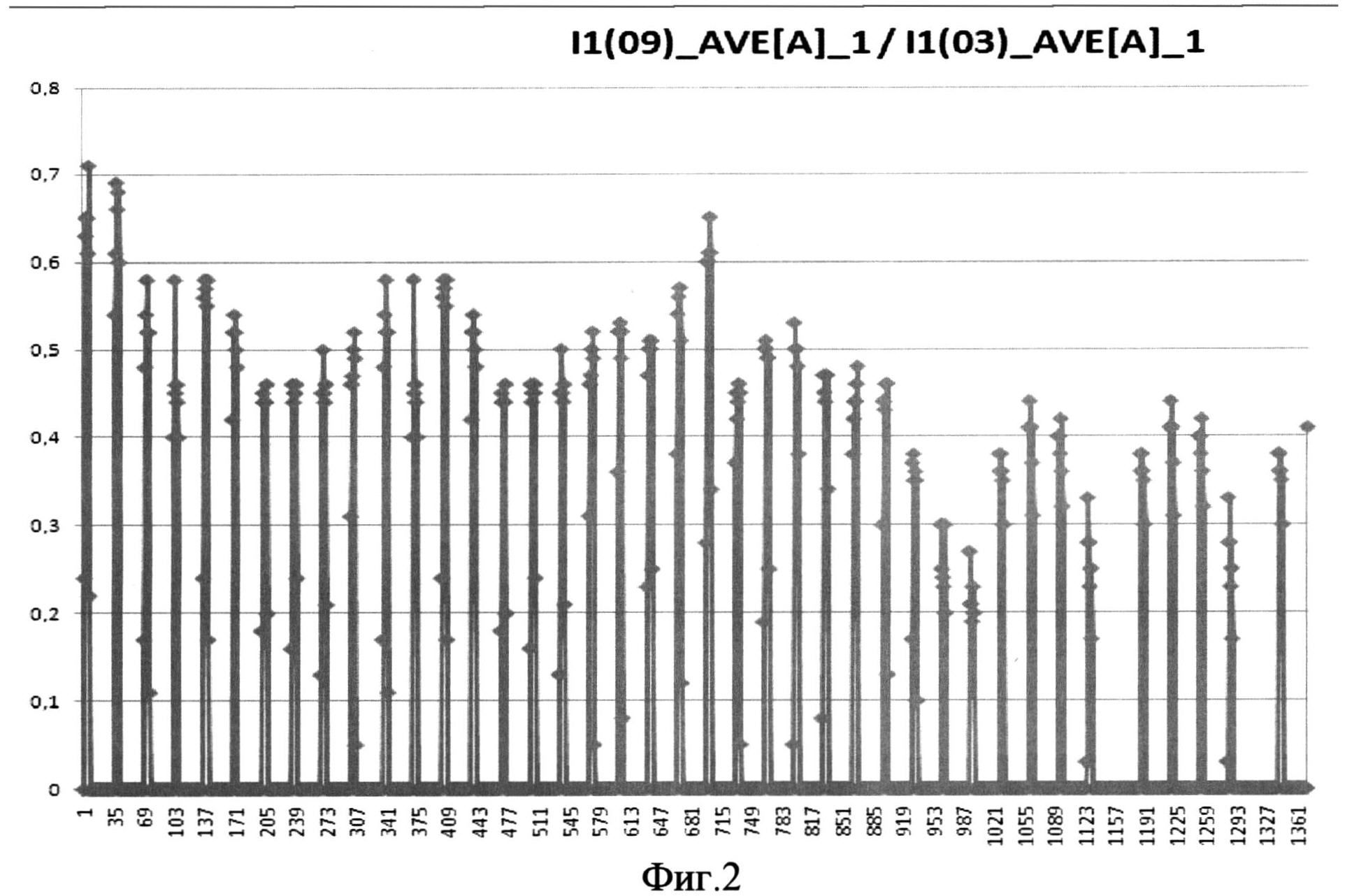
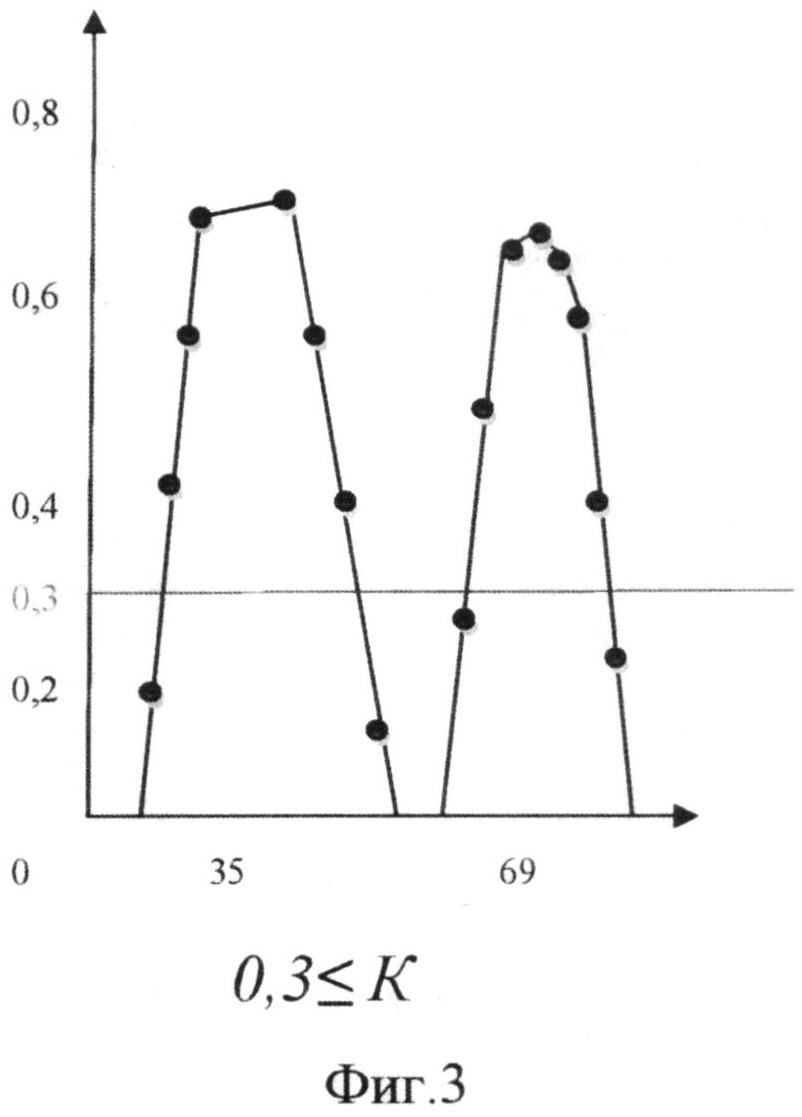
Для нечетных гармоник 3, 5, 7, 9 и 11, обладающих наибольшей амплитудой и являющихся наиболее информационными, что касается процессов, происходящих при работе кавитатора, К заложен в диапазоне 0,3≤K<1.
Диаграмма отношения величины напряжения 9-ой гармоники к 3-ой при включении-отключении кавитатора представлена на Фиг.2.
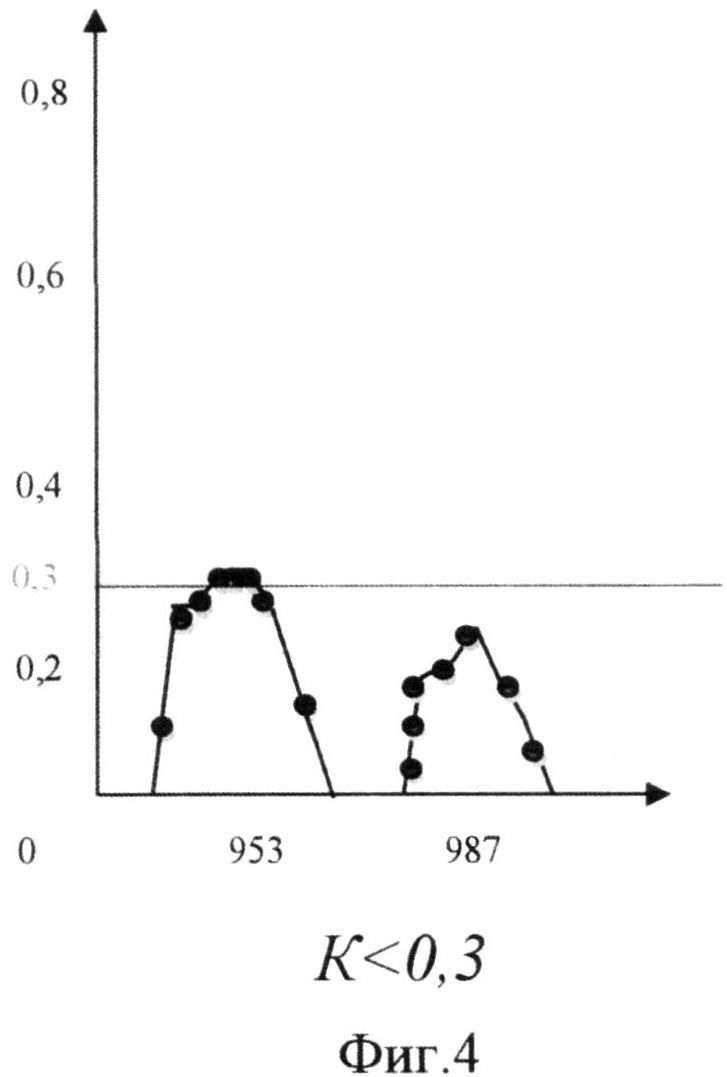
На Фиг.3, 4 - выделены две области, соответствующие одному циклу (включению-отключению) кавитатора за время t=1 мин, при различном значении К, представленные
На Фиг.3 при 0,3≤К - стабильный процесс работы кавитатора. На Фиг.4 при К<0,3 - процесс, грозящий срывом потока
Анализатор 3 передает сигнал на электронный блок управления, который с помощью частотного регулятора уменьшает скорость вращения электродвигателя.
Способ контроля режимов работы кавитатора основан на анализе соотношения высших гармоник в электрической сети, сравнении его с пороговым значением и формировании сигнала управления скоростью вращения электродвигателя.
Заявляемый способ управления позволяет автоматически поддерживать оптимальную скорость вращения ротора кавитатора для обеспечения максимальной эффективности нагрева технологических жидкостей. Не требует применения большого количества датчиков и анализирующих устройств, обладает большой надежностью и точностью.
2. Пример реализации заявляемого способа. Схема устройства для реализации заявляемого способа представлена на Фиг.5, где:
1-7 - Полимер изаторы;
8 - Распределительное устройство с анализатором концентрации полимера;
9 - Устройство по Фиг.1.
Способ очистки линейки полимеризаторов 1-7 в процессе производства бутилкаучука с использованием процесса активизации растворителя, например, предельных углеводородов, в котором после процесса нагревания в устройстве по Фиг.1, подают в один полимеризатор, где производят очистку стенок и мешалку от продуктов реакции. Переключение на следующий полимеризатор из линейки происходит после достижения максимальной концентрации полимера (продукта реакции) в растворителе (предельном углеводороде)
Способ управления процессом повышения стабильности работы кавитатора, включающийпрохождение жидкости в зазоре между ротором и статором и последующее преобразование полученной энергии в тепловую, регулирование процессом нагрева,отличающийся тем, чтопроизводят фиксацию анализатором всех характеристик электроэнергии, поступающей к электродвигателю,подают сигнал на электронный блок управления, который для рассмотрения нечетных гармоник вычисляет коэффициент К по формуле ,где К - программный коэффициент для блока управления,характеризующий режим работы кавитатора;V - величина напряжения гармоники;n, m - номер гармоники (где n>m, 3≤n, 1≤m≤n-2).- сравнивают полученное значение коэффициента с заложенным программным эталоном:- при К < эталонного значения электронный блок управления подает сигнал на частотный регулятор, который увеличивает скорость вращения электродвигателя,- при К > эталонного значения электронный блок управления подает сигнал на частотный регулятор, который уменьшает скорость вращения электродвигателя.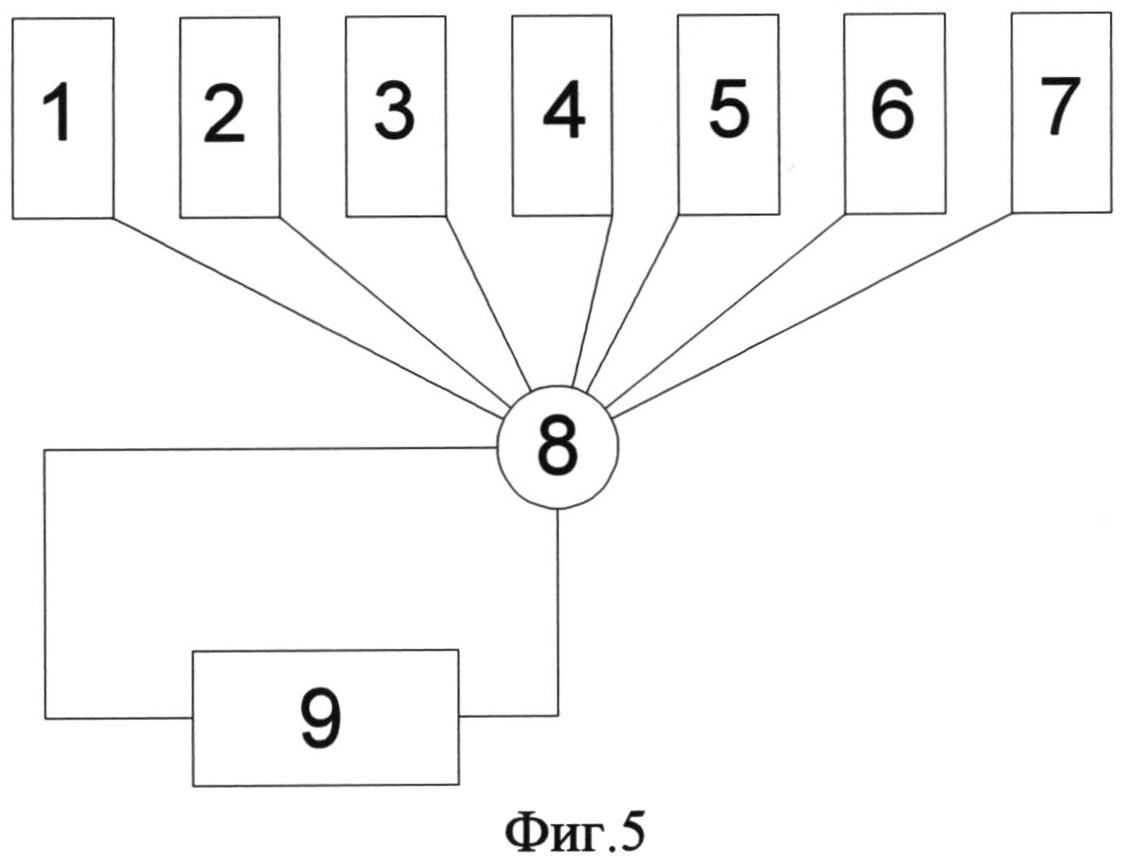
Эластомерная композиция на основе сополимера тетрафторэтилена и перфторалкилвиниловых эфиров
Полимерная композиция на основе уретансилоксанового каучука, отверждаемого под действием влаги
Эластомерная композиция на основе сополимера тетрафторэтилена и перфторалкилвиниловых эфиров
Способ получения фторангидрида дифтор(фторсульфат)уксусной кислоты
Система нагрева технологических жидкостей и получения газовой смеси
Способ управления расходом топлива в газотурбинный двигатель
Композиция на основе бромсодержащего сополимера фторолефинов
Способ получения модифицированных наночастиц железа
Композиция на основе сополимера фторолефина и перфторалкилвиниловых эфиров, содержащего нитрильные группы
Валковый дезинтегратор - классификатор
Эластомерная композиция на основе сополимера тетрафторэтилена и перфторалкилвиниловых эфиров
Полимерная композиция на основе уретансилоксанового каучука, отверждаемого под действием влаги
Эластомерная композиция на основе сополимера тетрафторэтилена и перфторалкилвиниловых эфиров
Способ получения фторангидрида дифтор(фторсульфат)уксусной кислоты
Система нагрева технологических жидкостей и получения газовой смеси
Способ управления расходом топлива в газотурбинный двигатель
Композиция на основе бромсодержащего сополимера фторолефинов
Способ получения модифицированных наночастиц железа
Композиция на основе сополимера фторолефина и перфторалкилвиниловых эфиров, содержащего нитрильные группы
Валковый дезинтегратор - классификатор

