Результат интеллектуальной деятельности: СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к области радиолокационной техники и может быть использовано при построении различных радиолокационных или аналогичных систем, предназначенных для определения местоположения летательных аппаратов с использованием радиоволн и управления движением летательных аппаратов.
Для обеспечения навигации летательных аппаратов (ЛА) определяют местоположение ЛА путем измерения их текущих координат. Местоположение ЛА определяют с помощью радиоволн в радиолокационных системах навигации.
Известен способ спутниковой радионавигации ГЛОНАСС, обеспечивающий непрерывность навигационно-временного обеспечения [1]. Это означает, что существует возможность определения координат местоположения, например, ЛА в любое время суток на базе спутниковых радионавигационных систем, включающих навигационные спутники (НС), наземный комплекс (НК), в составе наземной станции траекторных измерений и наземного вычислительного центра.
Реализация способа [1] заключается в следующем.
Используют несколько навигационных спутников (НС).
Формируют каждым НС сложный радиосигнал, который представляет собой гармоническое колебание с цифровой фазовой модуляцией.
Излучают сформированные НС сложные радиосигналы.
Принимают излученные сложные радиосигналы.
Измеряют дальность до ЛА с помощью принятых излученных сложных сигналов и доплеровское смещение частоты излученного сложного сигнала используя НК (наземную станцию траекторных измерений).
Определяют (вычисляют) три пространственные координаты ЛА, составляющие вектора скорости ЛА и текущее время с помощью НК (наземного вычислительного центра).
Передают вычисленную информацию с НК на борт НС.
Принимают переданную вычисленную информацию на борту НС.
Запоминают принятую информацию от НК на борту НС.
Передают на ЛА запомненную принятую информацию с борта НС в навигационном сообщении.
Принимают на ЛА навигационное сообщение с борта НС и используют полученную информацию о местоположении ЛА для управления движением ЛА (коррекции движения ЛА).
Недостатками способа [1] являются низкая помехоустойчивость работы при реализации способа при действии искусственных (преднамеренных) помех, которые делают способ [1] неработоспособным, и отсутствие автономности работы способа, поскольку необходим информационный контакт с несколькими НС. В результате ЛА также теряет свою работоспособность, поскольку на время действия помех информация о местоположении ЛА не поступает на борт ЛА, который движется по некорректируемой траектории.
Известен способ навигации летательных аппаратов [2], выбранный за прототип.
Способ [2] заключается в следующем.
Используют картосличительные корреляционно-экстремальные способы навигации (КЭСН), обеспечивающие отыскание и слежение за оптимальным режимом движения ЛА [3]. КЭСН основаны на сравнении текущих карт местности, полученных с использованием радиоволн, с эталонными картами той же местности, априори находящимися на ЛА, в основе которых лежит определение местоположения ЛА с последующим управлением движением ЛА путем коррекции их местоположения. Эталонные карты устанавливают на ЛА до момента начала движения над заданной поверхностью местности, а текущие карты получают во время движения ЛА. По отклонениям эталонных карт местности от текущих в заданной точке траектории движения ЛА определяют отклонение фактической траектории от заданной. В результате сравнения эталонных и текущих карт местности вырабатывают поправки в координаты ЛА для управления движением путем коррекции местоположения ЛА.
Сравнение эталонной и текущей карт осуществляется на основе вычисления функционалов, достигающих глобального экстремума при полном совмещении изображений указанных карт. Для обработки полученной при движении ЛА информации используют разностные алгоритмы, основанные на вычислении разностей измеренных высот текущей карты.
Способ [2] реализуется следующим образом.
Выбирают участок местности, размер которого в плановых координатах должен быть достаточен для определения местоположения ЛА.
Для мерного участка составляют эталонную карту местности в виде цифровой матрицы, размеры которой определяются размерами мерного участка.
Поскольку задачей корреляционно-экстремальной навигации является уточнение местоположения ЛА, определенного иными средствами навигации, то определение поправок к координатам ЛА (уточнение координат) производится в пределах области, определяемой погрешностью этих средств навигации (инерциальные средства навигации). Эта область имеет форму квадрата, сторона которого равна удвоенной погрешности иных средств навигации, находится внутри мерного участка и будет называться квадратом неопределенности.
Эталонная карта местности до начала движения находится на ЛА.
Реализацию способа навигации ЛА рассмотрим на примере составления текущей карты с помощью трех лучей радиоволн, расположенных в одной плоскости, которая находится перпендикулярно направлению движения ЛА.
Составляют текущую карту путем измерения параметров мерного участка с помощью радиоволн. Лучи радиоволн излучают следующим образом. Первым излучают луч, направление распространения которого расположено в плоскости, ортогональной плоскости горизонта мерного участка, или в плоскости, которая находится под углом к плоскости горизонта мерного участка (первый луч). Далее излучают лучи, направления распространения которых не совпадают с направлением распространения первого луча, причем направления распространения одной части лучей находятся слева (по направлению движения ЛА) от первого луча, а другой части - справа (по направлению движения ЛА) от первого луча. Количество лучей справа и слева от первого луча одинаковое.
По полученным данным о наклонных дальностях, а также об углах эволюции вычисляют координаты точек измерений в системе координат, связанной с ЛА.
Вычисляют местные координаты проекции точки траектории ЛА на плоскость плановых координат.
Для каждой гипотезы, то есть для всех возможных положений ЛА внутри квадрата неопределенности, по полученным данным о наклонных дальностях вычисляют одно слагаемое показателя близости.
Вычисляют для всех гипотез внутри квадрата неопределенности слагаемые показателя близости.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Определяют поправки к координатам местоположения ЛА в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка.
После определения местоположения ЛА в плановых координатах мерного участка вычисляют высоту ЛА над поверхностью мерного участка в координатах мерного участка (в точке определения местоположения ЛА в плановых координатах мерного участка).
Выдают поправки к координатам местоположения ЛА в плановых координатах мерного участка по трем координатам.
Управляют движением ЛА путем коррекции его местоположения по трем координатам по мере прохождения мерного участка.
Недостатком способа [2] является то, что при составлении текущей карты местности отсутствует информация о направлении движения летательного аппарата, скорости и ускорении движения ЛА.
Техническим результатом предлагаемого изобретения является повышение точности способа навигации летательных аппаратов за счет того, что при составлении текущей карты местности получают векторную информацию о движении летательных аппаратов по трем координатам, причем направление, скорость и ускорение движения ЛА определяют в трехмерном пространстве.
Технический результат достигается тем, что способ навигации летательных аппаратов заключается в использовании эталонной карты местности, выборе участка местности (мерный участок), находящегося в пределах эталонной карты, составлении текущей карты мерного участка путем измерений наклонных дальностей с помощью многолучевого режима измерения при помощи радиоволн, излучаемых в виде лучей, определении разности результатов многолучевых измерений по текущей карте, сравнении текущей и эталонных карт в пределах квадрата неопределенности для определения показателя близости путем сравнения разности результатов многолучевых измерений текущей и эталонной карт, определении плановых координат и высоты летательного аппарата, вычислении сигнала коррекции траектории движения и управлении движением летательного аппарата по трем координатам (плановые координаты и высота) путем коррекции его местоположения. Перед вычислением сигнала коррекции через равные интервалы времени Δt после получения первой текущей карты мерного участка получают вторую текущую карту и третью текущую карту мерного участка, определяют координаты (плановые координаты и высота) второго и третьего местоположений летательного аппарата в плановых координатах эталонной карты путем последовательного сравнения первой текущей и эталонной карт мерного участка в пределах первого квадрата неопределенности, представляющего собой массив данных M1, для определения показателя близости, второй текущей и эталонной карт мерного участка в пределах второго квадрата неопределенности, представляющего собой массив данных M2, для определения показателя близости, третьей текущей и эталонной карт мерного участка в пределах третьего квадрата неопределенности, представляющего собой массив данных M3, для определения показателя близости. Размеры второго и третьего квадратов неопределенности значительно меньше размеров первого квадрата неопределенности M2<<M1 и M3<<M1. Определяют направление движения, скорость и ускорение летательного аппарата путем сравнения координат (плановые координаты и высота) первого, второго и третьего местоположений летательного аппарата в плановых координатах эталонной карты, вычисляют сигнал коррекции траектории движения. Управляют движением летательного аппарата путем коррекции его местоположения используя полученные значения координат (плановые координаты и высота) и трехмерного вектора движения летательного аппарата (направление, скорость и ускорение движения по трем координатам).
Технический результат достигается тем, что при реализации способа навигации летательных аппаратов кроме одной (первой) текущей карты местности получают через равные промежутки времени вторую и третью текущие карты, по которым определяют первое, второе и третье местоположения летательного аппарата в плановых координатах эталонной карты для определения скорости (второе местоположение) и ускорения (третье местоположение) и направления движения ЛА в трехмерном пространстве.
В результате способ навигации позволяет повысить точность определения местоположения ЛА за счет использования информации о параметрах траектории движения ЛА - о трехмерном векторе движения ЛА (направлении, скорости и ускорении движения).
Способ навигации ЛА поясняют следующие чертежи:
- на фигуре 1 представлено взаимное расположение систем координат при движении ЛА;
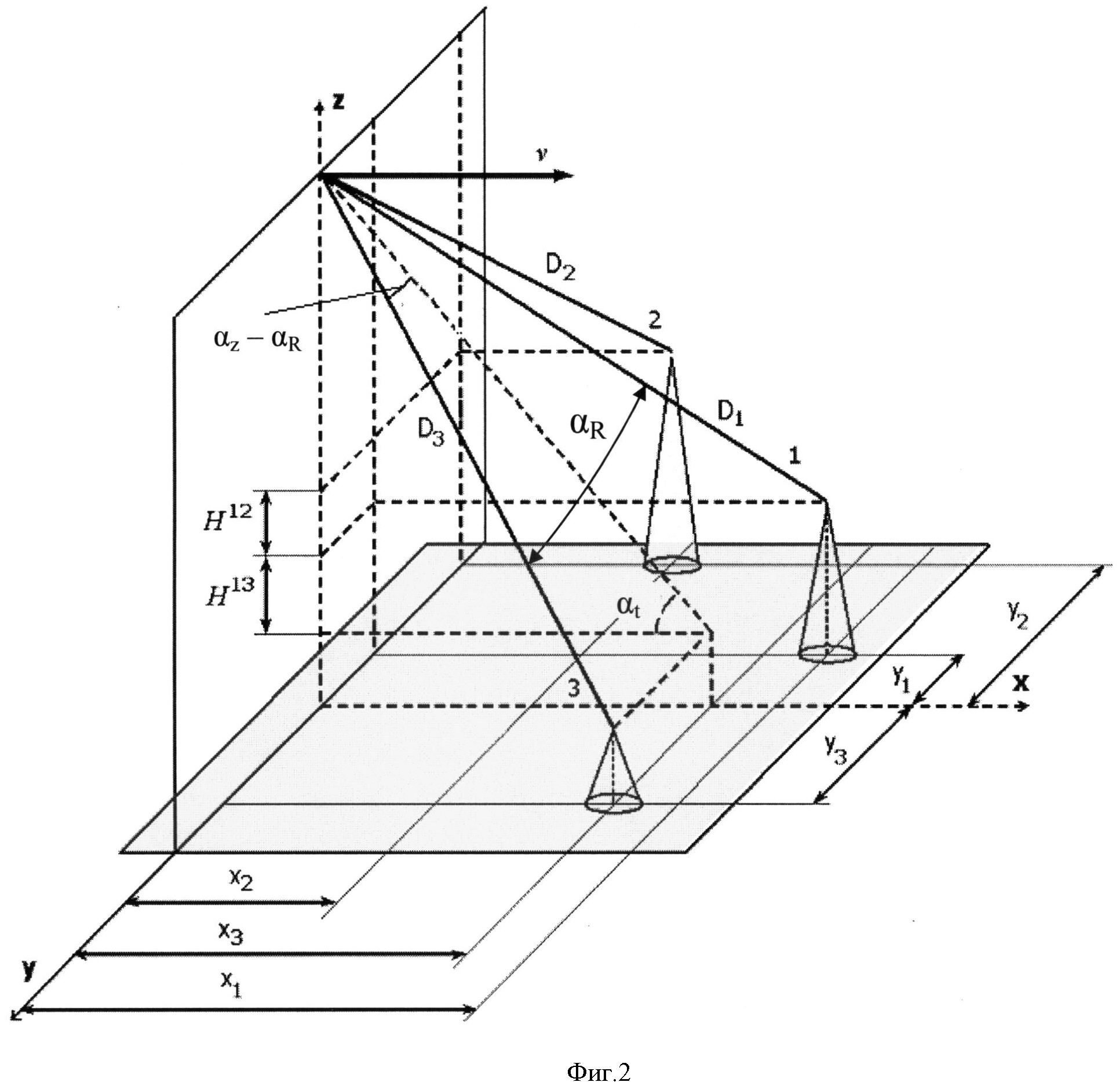
- на фигуре 2 показано измерение наклонной дальности по отдельным лучам радиоволн;
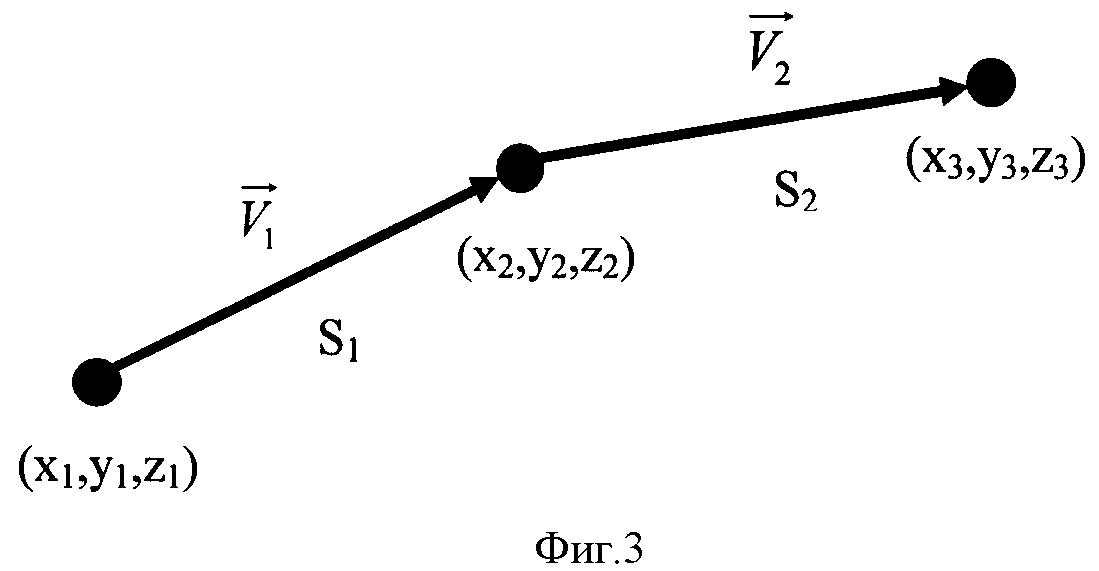
- на фигуре 3 показан вектор движения ЛА, причем координаты ЛА (x1, y1, z1), где (x1, y1) - плановые координаты и z1 - высота, получены с помощью первой текущей карты, координаты ЛА (x2, y2, z2) получены с помощью второй текущей карты, а координаты ЛА (x3, y3, z3) получены с помощью третьей текущей карты, стрелка - вектор движения ЛА, указывающий направление движения,  - вектор скорости движения ЛА, представленный в виде векторов скоростей
- вектор скорости движения ЛА, представленный в виде векторов скоростей  и
и  , S - расстояние между местоположениями ЛА, представленное в виде расстояний S1 и S2.
, S - расстояние между местоположениями ЛА, представленное в виде расстояний S1 и S2.
Способ навигации ЛА осуществляется следующим образом.
За время движения над мерным участком определяют текущую карту местности, для составления которой используют данные об измеренных значениях наклонной дальности с помощью лучей радиоволн, а также значениях скорости и углах эволюции ЛА (тангаж, крен и курс).
При анализе будем применять следующие системы координат, показанные на фиг.1, для:
- эталонной карты рельефа местности (большой прямоугольник на фиг.1);
- квадрата неопределенности (квадрат на фиг.1);
- возможных положений ЛА внутри квадрата неопределенности в момент начала измерений (точки на фиг.1) и точек траектории ЛА, в которых производят измерения (ромбы на фиг.1).
Местная система координат является левой прямоугольной декартовой системой координат Orxryrzr с началом Or. При этом оси Orxr и Oryr лежат в плоскости местного горизонта, то есть xr и yr являются плановыми координатами ЛА. Относительно плоскости Orxryr определяют высоты рельефа местности и ЛА. Таким образом, указанные высоты являются соответствующими значениями координаты zr. Начало координат Or выбрано так, что ось Orxr направлена в расчетную точку появления ЛА над участком местности, соответствующим эталонной карте. Ось Orxr считается коллинеарной по отношению к горизонтальной составляющей расчетного вектора скорости ЛА (фиг.1). Плановая система координат неподвижна и связана с эталонной картой.
Для того чтобы привязать плановые координаты к эталонной карте, используют дискретную систему координат. При этом оси Nx и Ny сонаправлены с осями местной системы Orxryr (фиг.1). Нулевым индексам в дискретной системе координат соответствует левый нижний угол эталонной карты. Предполагаемое значение дискретных координат ЛА в момент начала сбора данных Or обозначим как (nxrЭ, nyrЭ).
Связь между координатами дискретной и местной систем координат определяется выражениями вида
где ΔЭ - размер ячейки сетки эталонной карты.
При определении координат точек измерений в виде точек пересечения подстилающей поверхности и лучей радиоволн используют систему координат, связанную с текущим положением ЛА. Начало координат этой системы (точка Oa) поместим в текущую точку проекции траектории ЛА на плоскость плановых координат. Ось Oaxa по направлению совпадает с текущим направлением вектора скорости ЛА.
Связь между координатами системы, связанной с ЛА, и местной системы координат определяется выражениями

где xrc и yrc - координаты проекции текущего положения ЛА на плоскость плановых координат; αx - курс ЛА в текущей точке измерений (угол между вектором скорости ЛА и осью Orxr, на фиг.1 - это угол между осями xr и xa).
Исходными данными для вычислений в КЭСН являются:
- эталонная карта, представляющая собой массив данных о рельефе местности, элементы которого представляют собой высоты рельефа в узлах координатной сетки эталонной карты на плоскости Orxryr (фиг.1);
- данные, определяемые углом между лучами αR радиоволн;
- данные измерений, отличных от полученных с помощью лучей радиоволн, поступающие с каждым результатом измерений: значения угла αz крена, угла αx курса, угла αt тангажа, скорости τ ЛА (фиг.2);
- текущая карта, представляющая собой массив данных М в виде набора значений наклонных дальностей по всем трем лучам, полученных в каждом измерении.
Текущая карта местности определяется матрицей H(nx, ny) размером Nx×Ny, а эталонная карта - матрицей HЭ(nx, ny) размером NxЭ×NyЭ. Дискретные значения nsx и nsy соответствуют горизонтальному и вертикальному смещению текущей карты относительно эталонной и отсчитываются от левого нижнего угла эталонной карты, для которого nsx=nsy ~ ® •
В предлагаемом способе используют дифференциально-разностный алгоритм обработки многолучевых измерений, который рассмотрим на примере трехлучевого КЭСН. Лучи радиоволн излучают последовательно в следующем порядке: первым - центральный луч (по направлению движения ЛА), вторым - левый луч и третьим - правый луч относительно центрального луча.
Используемый алгоритм состоит в определении разности измерений левого и центрального лучей, правого и центрального лучей текущего измерения, а также в вычислении разности измерений центрального луча в текущем измерении и в предыдущем.
Показатель близости данных получим в виде
где для обозначения разностей измерений применена следующая индексация: верхний индекс 12 означает вычитание результата измерения по первому лучу из результатов измерения по левому, а верхний индекс 32 - вычитание результата по первому лучу из результата по правому, верхний индекс 22 означает результат измерения значения высоты по первому лучу в данном и в предыдущем измерении.
Обработку данных каждого измерения производят следующим образом.
По полученным данным о наклонных дальностях, а также об углах эволюции вычисляют координаты точек измерений в системе координат, связанной с ЛА.
Вычисляют местные координаты проекции точки траектории ЛА на плоскость плановых координат.
Для каждой гипотезы, то есть для всех возможных положений ЛА внутри квадрата неопределенности, по полученным данным о наклонных дальностях вычисляют слагаемые показателя близости.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Определяют поправки к координатам местоположения ЛА в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка.
Вычисляют местоположение ЛА в плановых координатах мерного участка.
Вычисляют высоту ЛА в координатах мерного участка.
Получают последовательно через равные промежутки времени Δt вторую текущую карту мерного участка и третью текущую карту мерного участка.
Используют при определении второго и третьего местоположений ЛА в плановых координатах эталонной карты второй и третий квадраты неопределенности, представляющие собой массивы данных M2 и M3 соответственно, размеры которых значительно меньше размеров первого квадрата неопределенности, представляющего собой массив данных Mx, M2<<M1 и M3<<M3.
Вычисляют последовательно второе и третье местоположения ЛА в плановых координатах мерного участка на основе измерений с помощью лучей радиоволн наклонных дальностей от ЛА до поверхности мерного участка используя последовательно вторую и третью текущие карты.
Получают значения вектора движения летательного аппарата: координаты трех местоположений ЛА (фиг.3), а также скорость и ускорение движения ЛА в трехмерном пространстве.
Выдают поправки к координатам местоположения ЛА (по трем координатам: плановым координатам и по высотам) используя значения трехмерного вектора движения ЛА.
Рассмотрим данный алгоритм подробно.
По измеренным значениям наклонных дальностей до элементов подстилающей поверхности Dj (j∈[1, 3] - номер луча радиоволн) определяют координаты точек измерений в системе координат, связанной с ЛА, а также измеряемые значения высоты рельефа Hj.
Согласно фиг.2 получим систему уравнений для каждого луча j в следующем виде
По полученным данным о скорости и углах эволюции определяют координаты проекции точки траектории ЛА на плоскость плановых координат.
Для первого измерения эти координаты считаются нулевыми (то есть положение ЛА во время первого измерения совпадает с началом координат системы Orxryr - фиг.1)

Местные координаты ЛА во время выполнения следующих измерений вычисляют по рекуррентным соотношениям
где Tc - период поступления измеренных данных, i=1, 2,… - номер текущего измерения.
Зная координаты точек измерений в системе координат, связанной с ЛА (Oaxaya), и местные координаты начала Oa, определяют координаты точек измерений в местной системе координат
Перебор гипотез заключается в следующем. Для каждого из возможных положений ЛА в пределах квадрата неопределенности вычисляют координаты (в дискретной системе координат) точек измерений, определенных ранее в местной системе координат. Для этого точку Or помещают поочередно в узлы координатной сетки внутри квадрата неопределенности и выполняют вычисление показателя близости данных. Координаты точек измерений в дискретной системе координат определяют как
где nhx и nhy - смещения точки Or для различных гипотез, определенные в количестве узлов сетки эталонной карты.
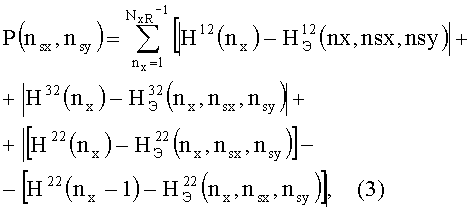
Показатель близости данных P(nhx, nhy) для данного случая имеет вид

Здесь nhx и nhy - смещения точки Or для различных гипотез; К - количество измерений;  - разность измеренных в k-м измерении значений высоты по первому и левому лучам;
- разность измеренных в k-м измерении значений высоты по первому и левому лучам;  - разность измеренных в k-м измерении значений высоты по первому и правому лучам;
- разность измеренных в k-м измерении значений высоты по первому и правому лучам;  - разность значений высоты измеренных в k-м и (k-1)-м измерениях;
- разность значений высоты измеренных в k-м и (k-1)-м измерениях;  - разность определенных для некоторой гипотезы (для определенного значения nhx и nhy) значений высоты по данным эталонной карты на k-м измерении по первому и левому лучам;
- разность определенных для некоторой гипотезы (для определенного значения nhx и nhy) значений высоты по данным эталонной карты на k-м измерении по первому и левому лучам;  - разность определенных для некоторой гипотезы значений высоты по данным трехмерной эталонной карты на k-м измерении по первому и правому лучам;
- разность определенных для некоторой гипотезы значений высоты по данным трехмерной эталонной карты на k-м измерении по первому и правому лучам;  - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м и (k-1)-м измерениях по первому лучу.
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м и (k-1)-м измерениях по первому лучу.
Для каждой гипотезы, то есть для всех возможных положений ЛА внутри квадрата неопределенности, по полученным данным о наклонных дальностях вычисляют слагаемые показателя близости.
По завершении всех измерений производят поиск глобального экстремума показателя близости данных P(nhx, nhy) и определяют поправки к координатам местоположения ЛА по плановым координатам.
Определяют поправки к координатам местоположения ЛА по высоте в момент определения поправок местоположения ЛА в плановых координатах мерного участка.
Описанную выше последовательность операций применяют к каждой из трех текущих карт мерного участка.
Для этого получают последовательно через равные интервалы времени Δt первую, вторую и третью текущие карты мерного участка.
Размеры первого квадрата неопределенности при определении первого местоположения ЛА в плановых координатах эталонной карты определяются величиной допустимых отклонений фактической траектории ЛА от заданной.
Используют второй и третий квадраты неопределенности при определении второго и третьего местоположений ЛА в плановых координатах эталонной карты, размеры которых значительно меньше размеров первого квадрата неопределенности. При определении первого местоположения ЛА с использованием первого квадрата неопределенности происходит перебор максимального количества гипотез (зона поиска максимальна) и определение отклонения фактической траектории движения ЛА от заданной. При определении второго и третьего местоположений ЛА количество гипотез при переборе значительно сокращается, поскольку размеры второго и третьего квадратов неопределенности будут определяться только двойным отклонением фактической траектории движения ЛА от заданной на основе априорной информации, полученной при определении первого местоположения. Это позволяет использовать второй и третий квадраты неопределенности значительно меньших размеров по сравнению с размерами первого квадрата неопределенности.
При этом не происходит снижение точности измерений, поскольку при переборе гипотез уменьшилось количество переборов за счет исключения гипотез, не влияющих на определение местоположения ЛА, а время измерения существенно сокращается. Поэтому обработка информации по второй и третьей текущим картам увеличивает время обработки информации по текущим картам не в 3 раза, а значительно меньше - не более чем на 20%.
Определяют координаты первого (x1, y1, z1), второго (x2, y2, z2) и третьего (x3, y3, z3) местоположений ЛА в плановых координатах эталонной карты, сравнивая последовательно первую текущую и эталонную карты мерного участка, вторую текущую и эталонную карты мерного участка и третью текущую и эталонную карты мерного участка.
Определяют по координатам трех местоположений ЛА (с использованием первой, второй и третьей текущих картах мерного участка) вектор направления движения ЛА (фиг.3) - скорость движения, направление движения и ускорение ЛА.
Определяют направление и скорость V1 движения ЛА после нахождения второго местоположения ЛА в плановых координатах мерного участка эталонной карты (фиг.3) используя вторую текущую карту мерного участка.
Скорость V1 движения ЛА определим в виде

где ΔS1 - расстояние между точкой с координатами (x1, y1, z1) на эталонной карте (первое местоположение ЛА в плановых координатах мерного участка эталонной карты) и точкой с координатами (x2, y2, z2) на эталонной карте (второе местоположение ЛА в плановых координатах мерного участка эталонной карты) (фиг.3); Δt1=Δt - временной интервал между моментом времени t1, в который была получена первая текущая карта, и моментом времени t2=t1+Δt, в который была получена вторая текущая карта.
Направление движения ЛА определим как направление вектора скорости  из точки с координатами (x1, y1, z1) в точку с координатами (x2, y2, z2) в плановых координатах мерного участка эталонной карты (фиг.3).
из точки с координатами (x1, y1, z1) в точку с координатами (x2, y2, z2) в плановых координатах мерного участка эталонной карты (фиг.3).
Уточняют направление и скорость движения ЛА после нахождения третьего местоположения ЛА в плановых координатах мерного участка эталонной карты и определяют ускорение движения ЛА (фиг.3).
Скорость V2 движения ЛА определим в виде

где ΔS2 - расстояние между точкой с координатами (x2, y2, z2) на эталонной карте (второе местоположение ЛА в плановых координатах мерного участка эталонной карты) и точкой с координатами (x2, y2, z2) на эталонной карте (третье местоположение ЛА в плановых координатах мерного участка эталонной карты) (фиг.3); Δt2=Δt - временной интервал между моментом времени t2, в который была получена вторая текущая карта, и моментом времени t3=t2+Δt, в который была получена третья текущая карта.
Направление движения ЛА определим как направление вектора скорости  из точки с координатами (x2, y2, z2) в точку с координатами (x3, y3, z3) в плановых координатах мерного участка эталонной карты (фиг.3).
из точки с координатами (x2, y2, z2) в точку с координатами (x3, y3, z3) в плановых координатах мерного участка эталонной карты (фиг.3).
Уточненную (среднюю) Vcp скорость движения ЛА определим как

Уточненное направление движения ЛА определим как направление вектора скорости Vcp из точки с координатами (x1, y1, z1) в точку с координатами (x3, y3, z3) в плановых координатах мерного участка эталонной карты.
Определяют ускорение ЛА.
Ускорение W движения ЛА определим как

где ΔV=V2-V1 - изменение скорости движения ЛА за время Δt.
Вычисляют сигнал коррекции траектории движения и управляют движением ЛА путем коррекции его местоположения дополнительно используя значения вектора движения ЛА (направление движения, скорость и ускорение движения в трехмерном пространстве).
Таким образом, данный способ навигации ЛА имеет существенные отличия от известных способов навигации, поскольку обеспечивает за время движения ЛА над мерным участком автономное определение поправок местоположения ЛА: координат трех местоположений ЛА (плановые координаты и высота) и вектора движения ЛА (направления, скорости и ускорения движения в трехмерном пространстве), чего нет в аналоге.
Реализуется повышенная точность управления движением ЛА, поскольку определяют поправки по трем координатам, скорости и ускорению движения и выдают сигналы коррекции местоположения ЛА, соответственно, по трем координатам, скорости и ускорению движения, чего не было в прототипе.
Обработка информации по второй и третьей текущим картам увеличивает время обработки информации по текущим картам не в 3 раза, а значительно меньше - не более чем на 20%.
Важно отметить, что рассмотренный способ навигации ЛА с предложенным алгоритмом сохраняет свои положительные свойства при различном количестве лучей радиоволн и обеспечивает работоспособность и для трех, и для большего количества лучей радиоволн. Число используемых лучей радиоволн определяется только временем, в течение которого обеспечивается измерение местоположения ЛА при движении над мерным участком поверхности.
ЛИТЕРАТУРА
1. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И.Перова, В.Н.Харисова. - М.: Радиотехника, 2005. - С.688 (с.12-15).
2. Патент РФ №2338158, МПК G01C 21/00 (2006.01). Способ навигации летательных аппаратов / Хрусталев А.А., Кольцов Ю.В., Егоров С.Н. // Изобретения. Полезные модели. - 2008. - Опубл. 10.11.2008. - Бюл. №31 (прототип).
3. Белоглазов И.Н., Джанджгава Г.И., Чигин Г.П. Основы навигации по геофизическим полям. - М.: Наука, 1985. - С.328 (с.10-11, 19-22, 25-34)
Способ навигации летательных аппаратов, заключающийся в использовании эталонной карты местности, выборе участка местности (мерный участок), находящегося в пределах эталонной карты, составлении текущей карты мерного участка путем измерений наклонных дальностей с помощью многолучевого режима измерения при помощи радиоволн, излучаемых в виде лучей, определении разности результатов многолучевых измерений по текущей карте, сравнении текущей и эталонных карт в пределах квадрата неопределенности для определения показателя близости путем сравнения разности результатов многолучевых измерений текущей и эталонной карт, определении плановых координат и высоты летательного аппарата, вычислении сигнала коррекции траектории движения и управлении движением летательного аппарата по трем координатам (плановые координаты и высота) путем коррекции его местоположения, отличающийся тем, что перед вычислением сигнала коррекции через равные интервалы времени Δt после получения первой текущей карты мерного участка, получают вторую текущую карту и третью текущую карту мерного участка, определяют координаты (плановые координаты и высота) второго и третьего местоположений летательного аппарата в плановых координатах эталонной карты путем последовательного сравнения первой текущей и эталонной карт мерного участка в пределах первого квадрата неопределенности, представляющего собой массив данных M, для определения показателя близости, второй текущей и эталонной карт мерного участка в пределах второго квадрата неопределенности, представляющего собой массив данных M, для определения показателя близости, третьей текущей и эталонной карт мерного участка в пределах третьего квадрата неопределенности, представляющего собой массив данных M, для определения показателя близости, причем размеры второго и третьего квадратов неопределенности значительно меньше размеров первого квадрата неопределенности M<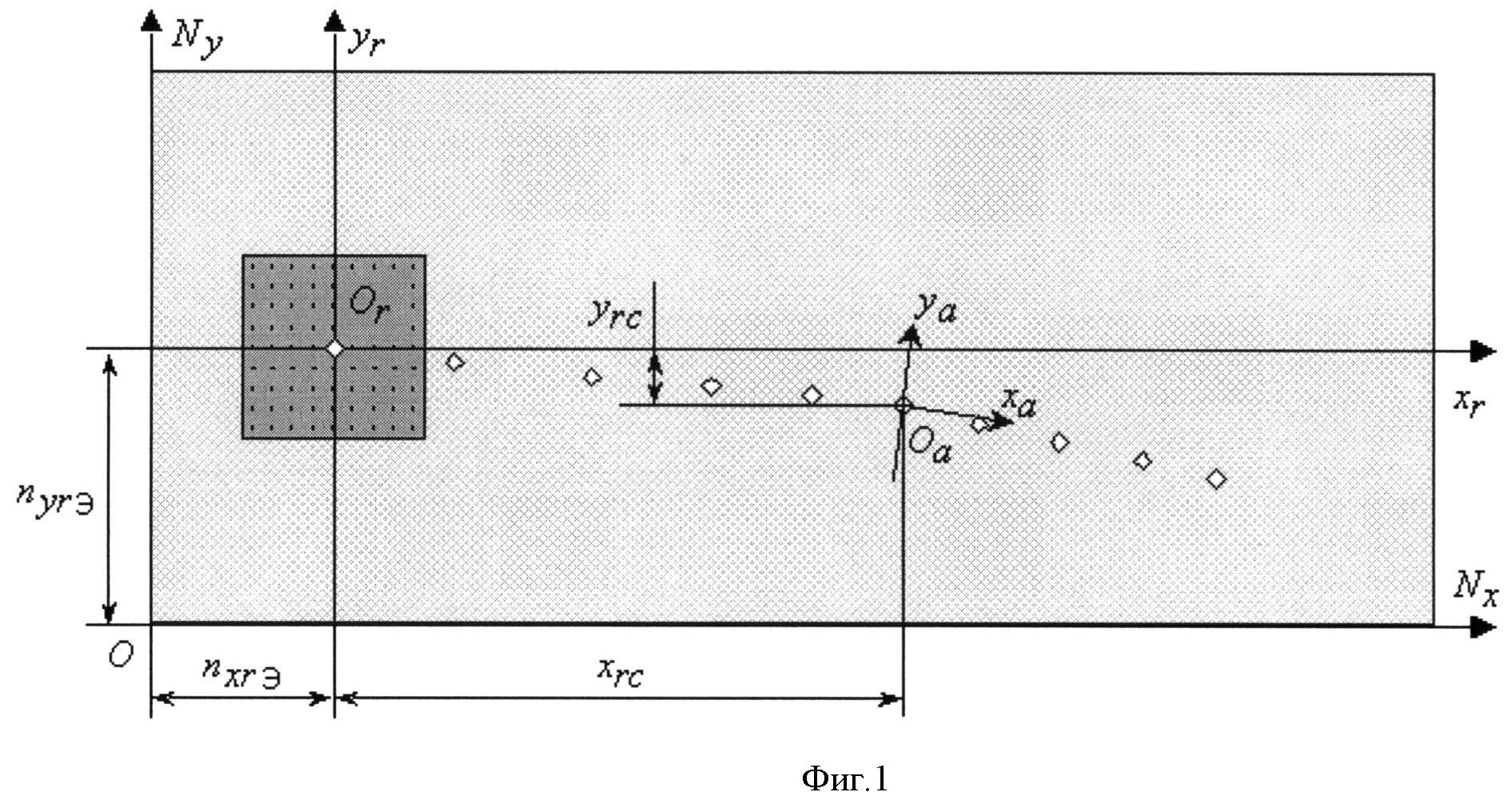
Гальванопластический способ изготовления сложно-рельефных элементов антенно-фидерных устройств
Пневматическая установка для испытаний
Шланговый гамма-дефектоскоп
Способ переработки жидких радиоактивных отходов от применения дезактивирующих растворов
Ультразвуковой способ контроля плотности в процессе эксплуатации деталей из высоконаполненных композитных материалов на основе октогена
Способ изготовления многоуровневых тонкопленочных микросхем
Способ герметизации трубчатых электронагревателей
Способ получения керамических блочно-ячеистых фильтров-сорбентов для улавливания газообразных радиоактивных и вредных веществ
Широкополосный спектрометр мягкого рентгеновского излучения
Способ герметизации волноводных свч-устройств
Гальванопластический способ изготовления сложно-рельефных элементов антенно-фидерных устройств
Пневматическая установка для испытаний
Шланговый гамма-дефектоскоп
Способ переработки жидких радиоактивных отходов от применения дезактивирующих растворов
Ультразвуковой способ контроля плотности в процессе эксплуатации деталей из высоконаполненных композитных материалов на основе октогена
Способ изготовления многоуровневых тонкопленочных микросхем
Способ герметизации трубчатых электронагревателей
Способ получения керамических блочно-ячеистых фильтров-сорбентов для улавливания газообразных радиоактивных и вредных веществ
Широкополосный спектрометр мягкого рентгеновского излучения
Способ герметизации волноводных свч-устройств

