СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПУСТОТ В ТРУБЕ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к обнаружению и измерению газовых пустот в трубе с текучей средой. (В настоящем раскрытии ссылки на «настоящее изобретение» или «изобретение» относятся к вариантам реализации и не обязательно к каждому варианту реализации, охватываемому прилагаемой формулой изобретения). В частности, настоящее изобретение относится к обнаружению и измерению газовых пустот в трубе с текучей средой с использованием передач ультразвуковых сигналов, не требующих внесения изменений или проникновения в трубу, к которой применены указанные передачи.
УРОВЕНЬ ТЕХНИКИ
[0002] Этот раздел предназначен для представления различных аспектов области техники, к которой относятся различные аспекты настоящего изобретения. В нижеследующем описании представлена информация для облегчения понимания сущности настоящего изобретения. Соответственно, необходимо отметить, что утверждения в нижеследующем описании следует читать в этой интерпретации и не следует относить их к допущениям известного уровня техники.
[0003] За последние 20 лет операторами атомных электростанций выявлены случаи обнаружения газовых пустот - обычно с воздухом, но иногда с другими газами, например с нерастворенным водородом, в жидкостных системах, играющих важную роль для обеспечения безопасности реактора. К жидкостным системам обычно относятся система аварийного охлаждения активной зоны ядерного реактора, система отвода остаточных тепловыделений, спринклерная система гермооболочки ядерного реактора и другие системы. Количество газовых пустот в некоторых случаях становится достаточным для обоснования постановки вопроса о работоспособности жидкостных систем. Ввод в действие жидкостной системы, содержащей газовые пустоты, приводит, например, к газовой блокировке насосов или к разрушительному гидравлическому удару. Источники газа различны и трудно контролируемы, поэтому обнаружение указанных пустот необходимо для различных отраслей промышленности.
[0004] Необходимость для владельцев лицензий на атомные станции управлять скоплениями газов официально установлена в циркуляре №2008-01 Комиссии по ядерному регулированию США, в котором подчеркнута необходимость постоянного мониторинга с целью обнаружения и количественного определения газовых пустот в этих системах в соответствии с требованиями технических условий на проектирование. Кроме того, в указанном циркуляре отмечено, что регулярные проверки работоспособности критических систем не гарантируют необходимого уровня работоспособности. Если при проведении испытания установлено, что функциональность системы ненадежна из-за скопления газа, то невозможно ответить, как долго была нарушена ее работоспособность.
[0005] Система, раскрытая в настоящем описании, выполнена с возможностью полного устранения вышеуказанных недостатков. Посредством указанной системы возможно непрерывное обнаружение возникновения пустот в любой из многих труб во многих системах, а также определение количества этих пустот, опять же непрерывно.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Настоящее изобретение относится к обнаружению и измерению газовых пустот в трубе с текучей средой. Указанное измерение выполняют с использованием ультразвуковых преобразователей, размещенных на указанной трубе с внешней стороны. Наличие или отсутствие пустот в указанной трубе обнаруживают посредством передачи и получения ультразвуковых сигналов вдоль геометрически определенных траекторий. Характеристики указанных пустот определяют посредством измерения времени прохождения указанных ультразвуковых сигналов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] На прилагаемых чертежах показаны предпочтительные варианты реализации настоящего изобретения и предпочтительные способы осуществления настоящего изобретения.
[0008] На фиг.1 показана структурная схема устройства, выполненного в одной из двух конфигураций (также указываемых как режимы работы), раскрытых в настоящем изобретении.
[0009] На фиг.2а показана блок-схема, относящаяся к работе указанного устройства в соответствии с настоящим изобретением.
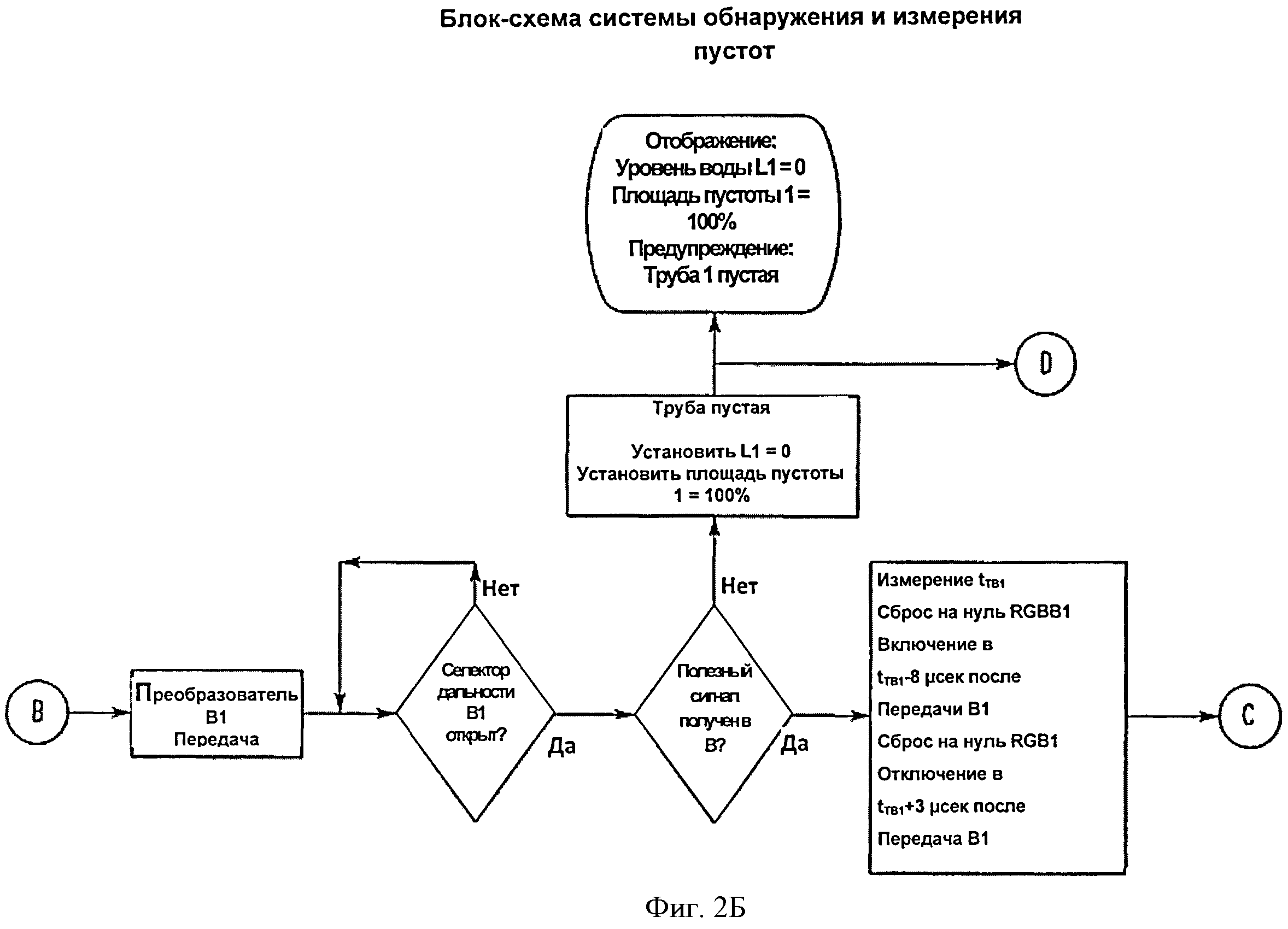
[0010] На фиг.2b показана блок-схема, относящаяся к работе указанного устройства в соответствии с настоящим изобретением.
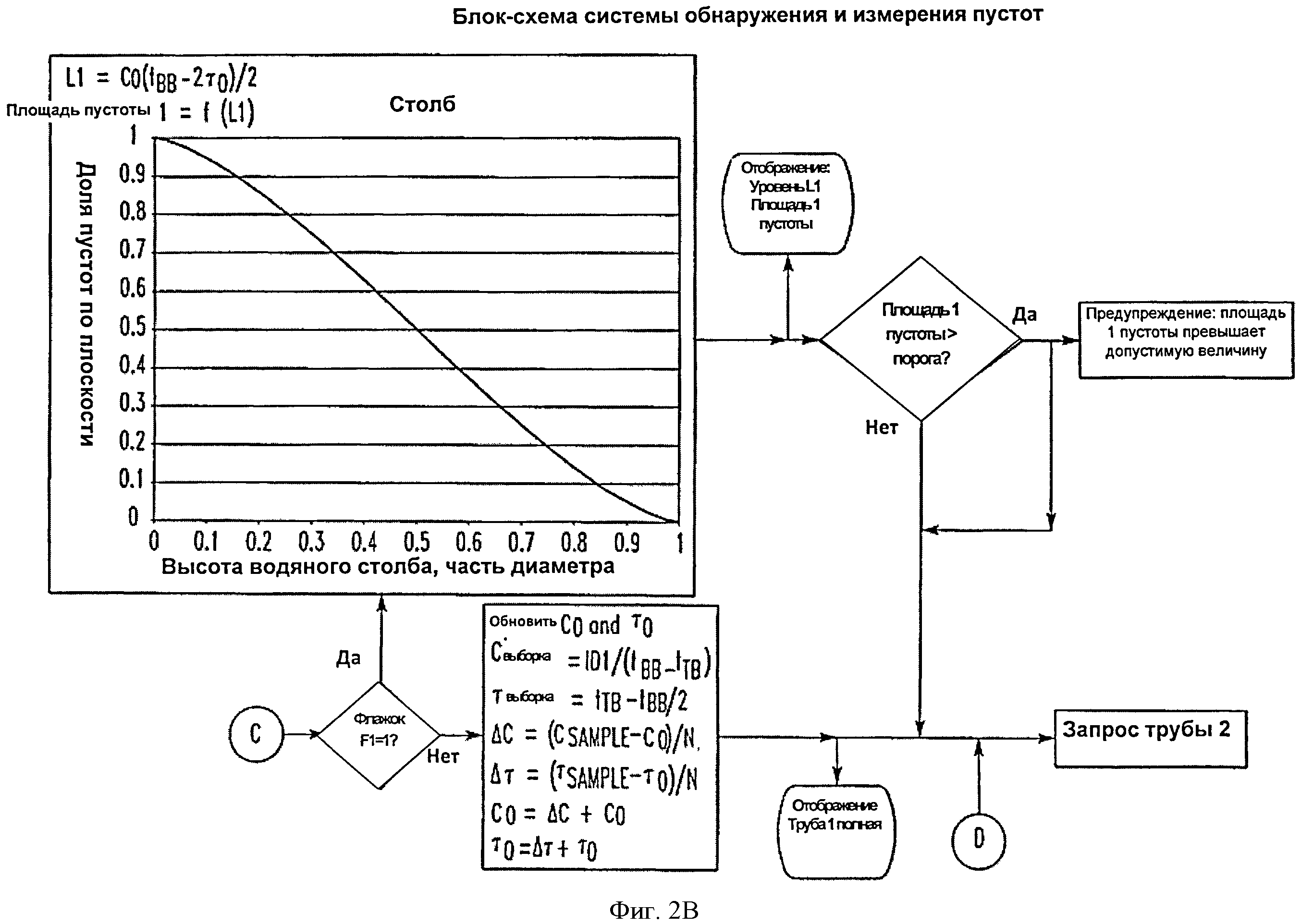
[0011] На фиг.2с показана блок-схема, относящаяся к работе указанного устройства в соответствии с настоящим изобретением.
[0012] На фиг.3 представлена пустота в трубе.
[0013] На фиг.4 показан график доли пустот как функции уровня, нормализованного для внутреннего диаметра указанной трубы.
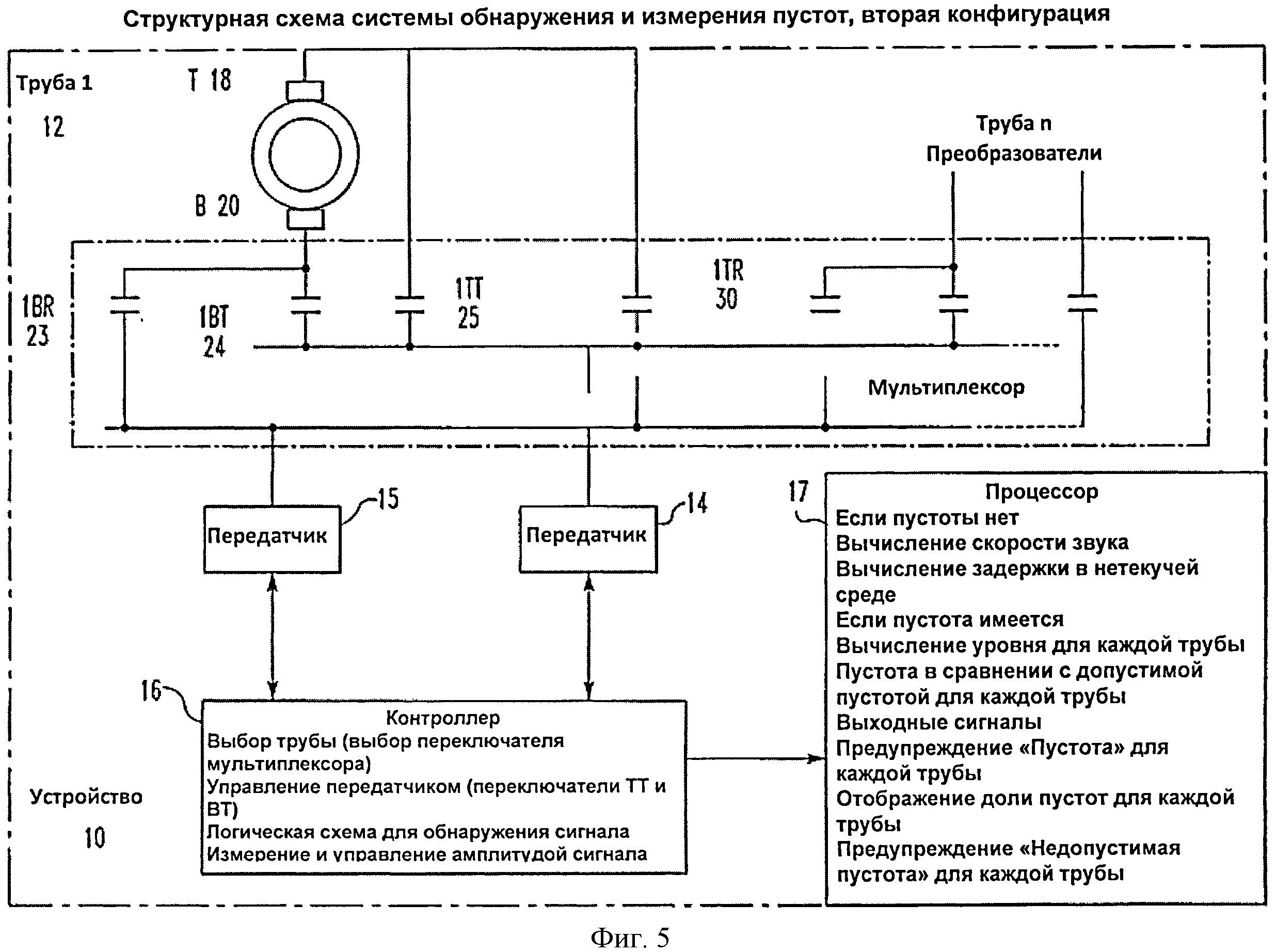
[0014] На фиг.5 показана структурная схема устройства, выполненного во второй из двух конфигураций (или режимов), раскрытых в настоящем изобретении.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0015] На прилагаемых чертежах, на которых одинаковые цифровые обозначения относятся к аналогичным или идентичным частям, показанным на чертежах, в частности на чертежах 1 и 3, показано устройство 10 для обнаружения и измерения газовых пустот в трубе 12 с текучей средой. Устройство 10 содержит первый ультразвуковой преобразователь, размещенный на трубе 12 с внешней стороны. Устройство 10 содержит второй ультразвуковой преобразователь, размещенный на трубе 12 с внешней стороны. Устройство 10 может также содержать мультиплексор 13, передатчик 14, приемник 15, контроллер 16 и процессор 17, сообщающиеся с первым и вторым преобразователями, которые распознают пустоты в трубе 12 на основании ультразвуковых измерений свойств текучей среды в трубе 12. Все указанные компоненты могут быть соединены с электронной памятью.
[0016] Первый ультразвуковой преобразователь может быть размещен с внешней стороны на верхней части трубы 12, а второй ультразвуковой преобразователь может быть размещен с внешней стороны на нижней части трубы 12 по существу под первым преобразователем. Контроллер 16, мультиплексор 13, передатчик 14 и приемник 15 взаимодействуют с первым и вторым преобразователями посредством мультиплексора 13, который обеспечивает генерирование передач ультразвуковых сигналов первым и вторым преобразователями, процесс которого последовательно описан далее:
[0017] Передача от первого преобразователя второму преобразователю:
если указанная передача принята вторым преобразователем, что определяется посредством приемника 15 и контроллера 16, то пустоты нет; если передача посредством первого преобразователя не принята вторым преобразователем, то пустота имеется.
[0018] Передача от второго преобразователя, которая отражается или от верхней стенки трубы 12, если пустоты нет, или от поверхности жидкости, если пустота имеется.
[0019] В соответствии с настоящим изобретением в указанной первой конфигурации (или режиме), если передача от первого преобразователя принята вторым преобразователем, то значения времени прохождения от этой передачи и от передачи от второго преобразователя самому себе посредством отражения могут быть преобразованы процессором 17 в приближенное измерение скорости звука в текучей среде. В соответствии с настоящим изобретением во второй конфигурации (или режиме), если передача от первого преобразователя принята вторым преобразователем, то значения времени прохождения от первой, второй и дополнительных передач используются для определения скорости звука без приближенных значений. Для обеих конфигураций, если передача от первого преобразователя не принята вторым преобразователем, то значение времени прохождения передачи от второго преобразователя к самому себе может быть преобразовано посредством процессора 17 в измерение высоты жидкости.
[0020] Для обеих конфигураций указанное преобразование в высоту посредством процессора 17 может быть выполнено с использованием измерения скорости звука в текучей среде, относящегося к последней передаче от первого преобразователя, для которого последняя передача была принята вторым преобразователем.
[0021] Процессор 17 выполнен с возможностью определения того, какая часть трубы 12 наполнена газом. Сигнал от первого преобразователя может проходить по поперечной траектории через стенку 24 трубы, внутреннюю часть трубы 12 и стенку 24 трубы во второй преобразователь, если пустоты нет. Мультиплексор 13, передатчик 14, приемник 15, контроллер 16 и процессор 17 могут обрабатывать передачи для обнаружения и измерения пустот от дополнительных преобразователей, размещенных на других трубах. Процессор 17 выполнен с возможностью выдачи предупреждения для трубы 12, когда достигнут порог, относящийся к пустоте в трубе 12. Передача от второго преобразователя может проходить и возвращаться по поперечной траектории через трубу 12 и внутреннюю часть трубы 12, если пустоты нет, и по траектории, пролегающей вдоль указанного поперечника, но являющейся его частью, если пустота имеется.
[0022] Настоящее изобретение относится к способу обнаружения и измерения газовых пустот в трубе 12 с текучей средой. Указанный способ включает этапы измерения свойств текучей среды внутри трубы 12 посредством передач ультразвуковой энергии от преобразователей, размещенных с внешней стороны на трубе 12. Также имеется этап распознавания пустоты в трубе 12 на основании указанных свойств текучей среды внутри трубы 12 с использованием сигналов, обрабатываемых процессором 17. Указанные этапы выполняют на одном или более материальных носителях данных, содержащих код для выполнения соответствующих этапов.
[0023] Также может иметься этап обеспечения посредством мультиплексора 13 и контроллера 16 передач от первого ультразвукового преобразователя, размещенного с внешней стороны на верхней части трубы 12, и от второго ультразвукового преобразователя, размещенного с внешней стороны на нижней части трубы 12 по существу под первым преобразователем. В соответствии с настоящим изобретением в обеих конфигурациях первый и второй преобразователи выполнены с возможностью генерирования передач ультразвуковых сигналов, происходящих последовательно следующим образом:
[0024] Передача от первого преобразователя второму преобразователю: если передача принята вторым преобразователем, что определяется посредством приемника 15 и контроллера 16, то пустоты нет; если передача посредством первого преобразователя не принята вторым преобразователем, то пустота имеется.
[0025] Передача от второго преобразователя, которая отражается или от верхней стенки трубы 12, если пустоты нет, или от поверхности жидкости, если пустота имеется.
[0026] В соответствии с первой конфигурацией настоящего изобретения (фиг.1), если передача от первого преобразователя принята вторым преобразователем, то может иметься этап преобразования значений времени прохождения от этой передачи и от передачи от второго преобразователя самому себе посредством отражения посредством процессора 17 в измерение скорости звука в текучей среде. Кроме того, может иметься этап преобразования этих измерений времени прохождения в приближенное измерение задержек в нетекучей среде при передаче от второго преобразователя самому себе. Если передача от первого преобразователя не принята вторым преобразователем, то может иметься этап преобразования значения времени прохождения передачи от второго преобразователя самому себе в измерение высоты жидкости посредством процессора 17. Указанный этап преобразования в высоту посредством процессора 17 может включать этап преобразования в высоту посредством процессора 17 с использованием измерения скорости звука в текучей среде и задержек в нетекучей среде, относящихся к последней передаче от первого преобразователя, для которого указанная последняя передача принята вторым преобразователем.
[0027] В соответствии со второй конфигурацией настоящего изобретения (фиг.5) использованы две дополнительные передачи, когда труба заполнена. Если передача от верхнего преобразователя 18 принята нижним преобразователем 20, то измеряется время прохождения для этой передачи и время прохождения от нижнего преобразователя 20 самому себе, как и в первой конфигурации. Однако во второй конфигурации использованы две дополнительные передачи, когда труба заполнена: передача от нижнего преобразователя 20 верхнему преобразователю 18 и передача от верхнего преобразователя 18 самому себе посредством отражения от нижней стенки трубы.
Как показано на фиг.5, для выполнения этих передач необходим дополнительный переключающий контакт 1TR 30 в мультиплексоре 13. Благодаря значениям времени прохождения для этих дополнительных передач в комбинации со значениями времени прохождения от первой и второй передач возможен расчет скорости звука в текучей среде и задержек в нетекучей среде без приближенных значений посредством процессора 17.
[0028] Для второй конфигурации, если первая передача от верхнего преобразователя нижнему преобразователю не принята нижним преобразователем, то указанная операция возвращается к операции первой конфигурации: значение времени прохождения для передачи от нижнего преобразователя самому себе преобразуется в высоту жидкости, а передача от верхнего преобразователя самому себе и передача от нижнего преобразователя верхнему преобразователю прекращаются.
[0029] Для обеих конфигураций имеется этап определения посредством процессора 17 того, какая часть трубы 12 заполнена газом. Сигнал от первого преобразователя выполнен с возможностью прохождения по поперечной траектории через стенку 24 трубы, внутреннюю часть трубы 12 и стенку 24 трубы во второй преобразователь, если пустоты нет. С целью обнаружения и измерения пустот может также иметься этап обработки передач от дополнительных преобразователей, размещенных на других трубах посредством мультиплексора 13, передатчика 14, приемника 15, контроллера 16 и процессора 17. Также имеется этап выдачи предупреждения посредством процессора 17, когда достигнут порог, относящийся к пустоте в трубе 12. Передача от второго преобразователя может проходить и возвращаться по поперечной траектории через трубу 12 и внутреннюю часть трубы 12, если пустоты нет, и траектории, пролегающей вдоль указанного поперечника, но являющейся его частью, если пустота имеется.
[0030] Со ссылкой на фиг.1 и в соответствии с настоящим изобретением преобразователь Т и преобразователь В являются ультразвуковыми преобразователями, установленными на наружной части округлой трубы 12, обычно наполненной жидкой водой, но потенциально содержащей пустоты. Как показано на фиг.1, преобразователь Т прикреплен к верхней части трубы 12, преобразователь В прикреплен к нижней части трубы. На границе между каждым преобразователем и внешней частью стенки 24 трубы нанесен связующий агент, пригодный для передачи ультразвука между преобразователем и трубой 12 и обратно. Указанные преобразователи номинально идентичны по диаметру и собственной частоте. В первом рабочем режиме преобразователь Т используется только в качестве передающего преобразователя. Преобразователь В используется в качестве приемного преобразователя (в "раздельно-совмещенном" режиме), следующего за передачей от преобразователя Т, и в качестве передающего и приемного преобразователя в "эхо-импульсном" режиме, когда он генерирует ультразвуковой импульс, который, если труба 12 наполнена, отражается от верхней внутренней части стенки 24 трубы, и, если труба 12 содержит газовый пузырь, от границы газ-вода. Значения времени прохождения для каждой из этих передач измеряются. Если в результате передачи от преобразователя Т не принят никакой сигнал посредством преобразователя В, то это принимают за указание на образование пустоты в верхней части трубы 12 (указанная пустота значительно ослабляет акустическую энергию от верхнего преобразователя, которая достигает нижнего преобразователя, тем самым мешая приему полезного сигнала).
Значение времени прохождения эхо-импульсной передачи от преобразователя В затем используют для определения высоты водяного столба, как измерено от нижней части трубы 12. Затем указанное измерение высоты используют для вычисления части трубы 12, заполненной газом. Как показано в таблице 1 и на фиг.1, устройство объединения каналов позволяет использование единого электронного прибора, такого как передатчик, приемник, обнаружение сигналов и обработка данных, для выявления наличия пустот и для вычисления доли пустот в различных трубах различных систем. На фиг.2а-2с показана блок-схема указанных измерений и их объяснение для одной трубы для первой конфигурации раскрыто в настоящем описании.
[0031] На фиг.1 и 3 показана первая конфигурация устройства 10 для обнаружения и измерения газовых пустот 22 в трубе 12 с текучей средой (пустота показана на фиг.3). Указанная труба помечена как труба 1 на фиг.1, чтобы показать, что согласно настоящему изобретению существует возможность применения нескольких труб. Устройство 10 содержит преобразователь 18, размещенный с внешней стороны на верхней части трубы 12, и преобразователь 20, размещенный с внешней стороны на нижней части трубы 12; указанные преобразователи выполнены с возможностью генерирования и приема импульсов ультразвуковой энергии, характеризующих свойства текучей среды внутри трубы 12. Устройство 10 содержит передатчик 14, сообщающийся с преобразователями 18 и 20 посредством переключателей 1ВТ (24) и 1ТТ (25) (для трубы 1) мультиплексора 13. Кроме того, устройство 10 содержит приемник 15, сообщающийся с преобразователем 1В (20) посредством переключателя 1BR (23) мультиплексора 13. Дополнительные переключатели 26 в мультиплексоре 13 позволяют взаимодействие между передатчиком 14 и приемником 15 и преобразователями на других трубах в количестве n (определенного предела нет), когда устройство 10 используется для мониторинга пустот в нескольких трубах. Контроллер 16, сообщающийся с мультиплексором 13, передатчиком 14 и приемником 15, управляет передачей и приемом ультразвуковых сигналов, проверяет прием полезных сигналов (или проверяет, что не принято никаких полезных сигналов) и измеряет значения времени прохождения импульсов ультразвука, когда полезные сигналы приняты. Данные от контроллера 16 передаются процессору 17, который вычисляет скорость звука в текучей среде в трубе, когда полезные сигналы приняты, и вычисляет высоту L27 (фиг.3) жидкости в трубе, когда при передаче от преобразователя Т 18 не принято никакого полезного сигнала. Для этого вычисления процессором 17 используется скорость звука в текучей среде для последовательности импульсной передачи, для которой последний полезный сигнал, переданный преобразователем Т 18, был принят преобразователем В 20. Кроме того, посредством высоты 27 жидкости процессор 17 вычисляет часть трубы 12, которая содержит газовую пустоту.
[0032] Контроллер 16 сообщается с передатчиком 14, приемником 15 и мультиплексором 13, который соединяет соответствующее электронное устройство с верхним и нижним преобразователями на каждой трубе, за которой осуществляют мониторинг, и может обеспечивать генерирование и детектирование передач ультразвуковых сигналов первым и вторым преобразователями в последовательности, описанной далее.
[0033] Описание последовательности для первой конфигурации
[0034] В нижеследующей пронумерованной последовательности имеются ссылки на таблицу 1, в которой отображена работа мультиплексора (X в этой таблице означает, что указанный контакт замкнут), на структурную схему фиг.1 и на блок-схемы фиг.2а-2с.
[0035] I. Контроллер 16 выполнен с возможностью замыкания контакта 1ТТ 25 мультиплексора 13, соединяющего передатчик 14 с верхним преобразователем 18, и с возможностью инициирования импульсной передачи от верхнего преобразователя 18 нижнему преобразователю 20. Все другие контакты мультиплексора разомкнуты.
[0036] II. Как распространено для большинства систем передач и приемов ультразвуковых импульсов, селектор дальности, размещенный в указанном контроллере, используется для обеспечения возможности поиска указанным приемником импульса во временном окне, в котором ожидается указанный. Как показано в блок-схеме на фиг.2, селектор RGTB1 дальности используется для передачи от верхнего преобразователя Т1 18 на трубе 1 нижнему преобразователю В1 20 на трубе 1. Указанный селектор дальности управляет контактом 1BR 23 мультиплексора 13, замыкая на период временного окна селектора дальности; контакт 1BR 23 соединяет нижний преобразователь 20 с приемником 15. Все другие контакты мультиплексора разомкнуты. Вся электроэнергия, получаемая нижним преобразователем 20 во время включения селектора дальности, обрабатывается приемником 15 и оценивается контроллером 16 для определения наличия полезного сигнала. Если полезный сигнал принят, то пустоты 22 нет; если никакого полезного сигнала не принято во время действия селектора дальности (контакт 1BR 23 разомкнут), то эта информация передается контроллером процессору в виде "флажка" (F1 в блок-схеме), обеспечивающего выходной сигнал «предупреждение о наличии пустоты в случае трубы I». Если полезный сигнал принят в течение периода, когда включен селектор дальности, то контроллер измеряет итоговое время прохождения от инициирования импульсной передачи до приема полезного сигнала. Указанное время прохождения передается на процессор 17, где оно используется со вторым временем прохождения, измеренным в нижеизложенной последовательности, для вычисления скорости звука и задержек в нетекучей среде для трубы 1. Измеренное время прохождения также используют для корректировки селектора RGTB1 дальности для следующей передачи. Указанная корректировка может быть необходима из-за изменения скорости звука в текучей среде в трубе 1 в случае изменения температуры текучей среды. Как показано в указанной блок-схеме, селектор RGTB1 дальности настроен так, что он включается (прием разрешен) вслед за передачей, меньшей на величину 8 µсекунд, чем измеренное время прохождения (указанное число дано только в качестве примера). Кроме того, как показано в блок-схеме, селектор дальности отключается (прием предотвращен) через 3 µсекунды после измеренного времени прохождения (указанное число дано только в качестве примера).
[0037] III. После завершения этапов, описанных в п.II, контроллер 16 замыкает контакт 1 ВТ 25, соединяющий передатчик 14 с нижним преобразователем 20, и инициирует импульсную передачу, которая будет отражена или от внутренней поверхности верхней части трубы, если труба наполнена жидкостью, или от поверхности границы жидкость-пустота, но в обоих случаях она будет отражена в направлении нижнего преобразователя 20. Все другие контакты мультиплексора разомкнуты.
[0038] IV. После завершения этапа III, эхо-импульсной передачи от нижнего преобразователя 20, контроллер 17 использует второй селектор RGBB1 дальности для управления контактом 1BR 23 мультиплексора 13, причем указанный контакт выполнен с возможностью соединения нижнего преобразователя 20 с приемником 15 в течение временного окна, в котором ожидается прием импульса. Все другие контакты мультиплексора разомкнуты. Если полезный сигнал принят в течение периода, когда включен селектор дальности, то контроллер измеряет итоговое время прохождения от инициирования импульсной передачи до приема полезного сигнала. Указанное время прохождения передается на процессор 17, где оно используется со временем прохождения, измеренным в этапе II, для вычисления скорости звука и задержек в нетекучей среде для трубы 1. Измеренное время прохождения также используется для настройки селектора RGBB1 дальности для следующей передачи. Как показано в блок-схеме, селектор RGBB1 дальности настроен так, что он включен (прием разрешен) вслед за передачей, меньшей на величину 8 µсекунд, чем указанное измеренное время прохождения (указанное число дано только в качестве примера). Кроме того, как показано в блок-схеме, селектор дальности отключен (прием предотвращен) на величину 3 µсекунды больше, чем указанное измеренное время прохождения (указанное число дано только в качестве примера). Поскольку передача на этом этапе от преобразователя В и до него является эхо-импульсной передачей, то полезный сигнал будет принят, если объем текучей среды в трубе выше минимума, который может быть выявлен. Следовательно, если не принято никакого сигнала в течение периода селектора дальности, то измеримой текучей среды не имеется, как показано в блок-схеме. В обоих случаях - есть ли полезный сигнал или нет полезного сигнала - указанная информация передается от контроллера 16 процессору 17 для соответствующей обработки и выходного сигнал.
[0039] V. Если передача на этапе стадии I успешно принята нижним преобразователем на этапе II, а передача на этапе III успешно принята на этапе IV, то значения времени прохождения, измеренные на этапах II и IV, могут быть преобразованы процессором 17 в измерение задержек в нетекучей среде для этих передач и в измерение скорости звука в текучей среде в трубе 1 (указанный алгоритм описан в нижеследующем разделе). Если передача на этапе I от верхнего преобразователя 18 не принята нижним преобразователем 20 на этапе II, то контроллер 16 устанавливает флажок, как показано в блок-схеме, который обеспечивает преобразование процессором 17 значения времени прохождения передачи, отраженной на этапе III от нижнего преобразователя 20 и принятой нижним преобразователем 20 на этапе IV, в измерение высоты жидкости. Преобразование в высоту посредством сигнального процессора 17 может быть выполнено с использованием измерений скорости звука и задержек в нетекучей среде, полученных из значений времени прохождения, относящихся к предыдущим передачам от верхнего преобразователя 18, для которого полезный сигнал принят нижним преобразователем 20. Когда обе передачи успешны, в блок-схеме показано, что возможно использование кратных выборок N успешных измерений времени прохождения с целью определения скорости звука и задержек в нетекучей среде, которые используются для вычисления высоты жидкости, когда передача от верха к низу неуспешна. Посредством использования кратных выборок уменьшены случайные ошибки при измерении скорости звука и задержек в нетекучей среде благодаря турбулентности и другим факторам. Требуемое количество выборок N вводится пользователем.
[0040] VI. На основании измерений высоты жидкости и внутреннего диаметра трубы, введенных пользователем, посредством процессора 17 определяют, какая часть трубы 12 наполнена газом.
[0041] VII. После выполнения измерений для трубы 1 посредством контроллера 16 обеспечивают повторение вышеуказанной последовательности мультиплексором 13 для трубы 2, затем для трубы 3 и так далее до завершения указанной последовательности для n-ной трубы, после чего последовательность повторяют для для трубы 1 и так далее до конца.
[0042] Описание последовательности для второй конфигурации
[0043] Дальнейшее описание идет со ссылками на фиг.5 и таблицу 2. Размещение преобразователей 18 и 20 идентично их размещению в первой конфигурации. Последовательность операций для второй конфигурации также идентична для этапов I, II, III и IV, как описано выше для первой конфигурации, в случае, если труба наполнена (передача от верхнего преобразователя 18 успешно принята нижним преобразователем 20) или если имеется пустота (передача от верхнего преобразователя 18 не принята нижним преобразователем 20). Во второй конфигурации использованы дополнительные передачи, как описано далее, которые начинаются после завершения этапа IV. Этапы V, VI, VII и VIII предпринимают, только если полезный импульс принят на этапе II. Если никакого полезного импульса не принято на этапе II, то последовательность операций переходит прямо на нижеизложенный этап IX.
[0044] V. Если полезный импульс принят на этапе II, то контроллер 16 замыкает контакт 1 ВТ 25, соединяющий передатчик 14 с нижним преобразователем 20, и передает импульс, который будет принят верхним преобразователем 18 (поскольку труба наполнена). Все другие контакты мультиплексора разомкнуты.
[0045] VI. Селектор RGBT1 дальности (эта последовательность не показана в блок-схеме фиг.2, которая применима к первой конфигурации) обеспечивает замыкание контакта 1TR 30 контроллером 16 на период, в течение которого импульс, переданный от нижнего преобразователя, проходит до верхнего преобразователя плюс-минус допустимое отклонение. Все другие контакты мультиплексора разомкнуты. Если полезный сигнал принят в течение периода, когда включен селектор дальности, то посредством контроллера 16 измеряют итоговое время прохождения от инициирования импульсной передачи до приема полезного сигнала. Указанное время прохождения передается на процессор 17, где оно используется с другими измеренными временами прохождения для вычисления скорости звука и задержек в нетекучей среде для трубы 1. Указанное измеренное время прохождения также используется для корректировки селектора RGBT1 дальности для следующей передачи.
[0046] VII. Если полезный импульс получен на II и на последующем этапе VI, то контроллер 16 замыкает контакт 1ТТ 25, соединяющий передатчик 14 с верхним преобразователем 18, и передает импульс, который после отражения от нижней внутренней поверхности трубы будет получен верхним преобразователем 18 (поскольку труба наполнена). Все другие контакты мультиплексора разомкнуты.
[0047] VIII. Селектор RGTT1 дальности (эта последовательность не показана в блок-схеме фиг.2) обеспечивает замыкание контакта 1TR 30 контроллером 16 на период (плюс-минус допустимое отклонение), в течение которого импульс, переданный от верхнего преобразователя 18, проходит до верхнего преобразователя 18 отраженный нижней внутренней поверхностью трубы. Все другие контакты мультиплексора разомкнуты. Если полезный сигнал принят в течение периода, когда включен селектор дальности, то контроллер измеряет итоговое время прохождения от инициирования импульсной передачи до указанного приема полезного сигнала. Указанное время прохождения передается на процессор 17, где оно используется с другими измеренными значениями времени прохождения для вычисления скорости звука и задержек в нетекучей среде для трубы 1. Указанное измеренное значение времени прохождения также используется для корректировки селектора RGTT1 дальности для следующей передачи.
[0048] IX. Если передача на этапе I успешно принята на этапе II, то значения времени прохождения, измеренные на этапах II, IV, VI и VIII, могут быть преобразованы посредством процессора 17 в измерение задержек в нетекучей среде для этих передач и в измерение скорости звука в текучей среде в трубе 1 (указанный алгоритм описан в нижеследующем разделе). Если передача на этапе I от верхнего преобразователя 18 не принята нижним преобразователем 20 на этапе II, то контроллер 16 устанавливает флажок, как показано в блок-схеме для последовательности согласно первой конфигурации, обеспечивающий преобразование процессором 17 значения времени прохождения передачи, которая отражена на этапе III от нижнего преобразователя 20 и принятой нижним преобразователем 20 на этапе IV, в измерение высоты жидкости. Кроме того, если никакого полезного сигнала не принято на этапе II, то передачи на этапах V и VII прекращены. Указанное преобразование в высоту посредством сигнального процессора 17 может быть выполнено с использованием измерений скорости звука и задержек в нетекучей среде, извлеченных из значений времени прохождения, относящихся ко всем передачам, предшествующим неудачной попытке полезного сигнала от верхнего преобразователя 18 достичь нижнего преобразователя 20. Когда все передачи успешны, измерения значений времени прохождения могут быть использованы с целью определения скорости звука и задержек в нетекучей среде, которые используются для вычисления высоты жидкости, когда передача от верха к низу неуспешна.
[0049] X. На основании измерения высоты жидкости и внутреннего диаметра трубы, введенных пользователем, процессор 17 может определить, какая часть трубы 12 наполнена газом.
[0050] XI. После выполнения измерений для трубы 1 контроллер 16 обеспечивает повторение мультиплексором 13 вышеуказанной последовательности для трубы 2, затем для трубы 3 и так далее до завершения указанной последовательности для n-й трубы, после чего указанную последовательность повторяют для трубы 1 и так далее до конца.
[0051] Описание алгоритма
[0052] Если труба 12 наполнена, то указанное время прохождения от инициирования передачи преобразователем Т до обнаружения принятого сигнала преобразователем В вычисляется как:
[0053] 1) tТВ=τTt+τBr+ID/C
[0054] tТВ - Время прохождения для ультразвукового импульса, проходящего от преобразователя Т до преобразователя В, если труба 12 наполнена. Это время включает время прохождения через столб жидкости, разделяющий внутреннюю часть трубы 12 в Т и внутреннюю часть трубы 12 в В, а также электронные и акустические задержки в нетекучей среде между передатчиком и электронной частью системы обнаружения сигналов.
[0055] τTt - Указанная задержка в нетекучей среде связана с передачей от преобразователя Т: задержка передатчика, время прохождения для кабеля от передатчика до преобразователя Т, задержка преобразователя Т, время прохождения через стенку трубы в Т.
[0056] τBr - Время прохождения через стенку трубы в В, задержка преобразователя В, время прохождения для кабеля от преобразователя В до приемника, задержка электронной части приемника и задержка, связанная с измерениями обнаружения импульса и времени прохождения (например, если прохождение через нуль второго полуцикла принятого сигнала используется для измерения времени прохождения, то задержка связана с первым полуциклом принятого сигнала).
[0057] ID - Внутренний диаметр трубы 12 (вводится пользователем).
[0058] С - Скорость звука в текучей среде, которую содержит труба 12. Поперечные составляющие скорости текучей среды благодаря естественной конвекции являются величинами, на 3 порядка меньшими, чем скорость звука, и поэтому ничтожно малы.
[0059] Если труба 12 не наполнена, то стенка трубы под преобразователем Т немедленно оказывается покрытой газовым пузырем, мешающим передаче ультразвука преобразователю В.
[0060] Если труба 12 наполнена, то время прохождения ультразвука от инициирования передачи от преобразователя В, работающего в эхо-имульсном режиме, до его приема и обнаружения посредством того же преобразователя вычисляется как:
[0061] 2) 2tВВ=τBt+τBr+2 ID/C
[0062] tВВ - Время прохождения от передачи до обнаружения ультразвука, проходящего от преобразователя В, отражаемого от верхней стенки трубы 12 и принимаемого преобразователем В.
[0063] τBt - Задержка в нетекучей среде, связанная с передачей от преобразователя В: задержка передатчика, время прохождения для кабеля от передатчика до преобразователя В, задержка преобразователя В, время прохождения через стенку трубы в В.
[0064] В первой конфигурации (или в первом режиме работы) предполагается, что τBt, задержка в нетекучей среде, связанная с передачей от преобразователя В, является по существу аналогичной для τTt, задержке в нетекучей среде, связанной с передачей от преобразователя Т: аналогичный передатчик использован для обеих передач, длины кабеля могут быть выполнены одинаковыми, преобразователи выполнены в одинаковой конфигурации, и толщины стенки трубы в местах Т и В находятся в пределах нескольких процентов относительно друг друга. Следовательно, τBt+τBr может быть заменено на τBt+τBr в уравнении (1). Посредством выполнения этой замены и вычитания уравнения (1) из уравнения (2) получают выражение для скорости звука.
[0065] 3) ID/C=tВВ-tТВ
[0066] 3А) С≅ID/(tВВ-tТВ)
[0067] Если труба 12 наполнена, то выражение 3А) может быть использовано в форме скользящего среднего скорости звука в текучей среде в трубе 12, как показано в блок-схеме фиг.2 (скорость звука изменяется, если изменяется температура текучей среды). Скользящее среднее может быть не нужно, если температура изменяется медленно. Блок-схема предназначена для показа того, как образуется скользящее среднее, если это сочтено необходимым. Кроме того, как показано в блок-схеме, если начинает образовываться пустота 22, то используется средняя скорость звука, которая вычислена, пока труба 12 была наполнена, вместе со средним значением задержек в нетекучей среде, измеренных, когда труба наполнена, с целью нахождения уровня воды в трубе. Процесс определения задержек в нетекучей среде описан в нижеследующих параграфах.
[0068] Итоговые задержки в нетекучей среде, связанные с работой преобразователя В в эхо-импульсном режиме, τBt+τBr, находят путем замены уравнения (3) в уравнении (2).
[0069] 4) tВВ≅τBt+τBr+2(tВВ-tТВ)
[0070] 4А) τBt+τBr≅2tТВ-tВВ
[0071] Опять же, как показано в блок-схеме фиг.2, скользящее среднее итоговой задержки в нетекучей среде в эхо-импульсном режиме составляют, пока труба 12 наполнена, для использования после того, как начинает образовываться пустота 22. Опять же скользящее среднее может быть не нужно для вычисления задержек, но показано для полноты.
[0072] Если начинает образовываться пустота 22, как подтверждено неудачей принять сигнал при передаче от преобразователя Т преобразователю В, то значение времени прохождения передачи в эхо-импульсном режиме от преобразователя В используется для определения уровня L воды в трубе 12:
[0073] 5) tВВ≅(τBt+τBr)0+2L/C0
[0074] 5A) L≅[tВВ-(τBt+τBr)0]C0/2
[0075] Здесь (tBt+τBr)0 и С0 - это соответственно задержки в нетекучей среде, выраженные через скользящее среднее, и скорость звука в текучей среде, составленное, пока труба 12 наполнена. Знак приближенного равенства в (5) и (5А) предназначен для выражения неопределенностей в предположении, что τTt равно τBt.
[0076] Вторая конфигурация (или второй режим работы) показана на фиг.5. Функционирование мультиплексора описано в таблице 2. Блок-схема не представлена; логическая схема в целом аналогична логической схеме режима А за исключением обеспечения по мере необходимости 4 передач. Когда труба наполнена, во второй конфигурации используются четыре передачи следующим образом:
[0077] (а) Раздельно-совмещенная передача от Т к В, идентичная передаче в режиме 1. Для этой передачи измеряют время прохождения tВВ, выраженное в уравнении (1) и повторенное ниже
[0078] 1) tТВ=τTt+τBr+ID/C
[0079] (b) Передача в эхо-импульсном режиме от В к В, идентичная передаче в режиме 1. Для этой передачи измеряют время прохождения tВВ, выраженное в уравнении (2) и повторенное ниже
[0080] 2) tВВ=τ+τBr+2ID/C
[0081] (с) Раздельно-совмещенная передача от В к Т. Для этой передачи измеряют время прохождения tВт, выраженное в уравнении (6) ниже. Эту передачу инициируют только, когда труба наполнена, как подтверждено успешной передачей от Т к В.
[0082] 6) tВТ=τBt+τTr+ID/C
[0083] Передача в эхо-импульсном режиме от Т к Т. Для этой передачи измеряют время прохождения tTT выраженное в уравнении (7) ниже. Эту передачу инициируют только, когда труба наполнена, как подтверждено успешной передачей от Т к В.
[0084] 7) tТТ=τTt+τTr+2ID/C
[0085] Представленные выше четыре уравнения (1), (2), (6) и (7) могут быть решены без приближенных значений для задержек в нетекучей среде, τBt и τBr, которые необходимы для нахождения уровня L текучей среды в уравнении 5А. В частности, может быть показано, что:
[0086] 8) τBt+τBr=tТТ-tТВ-tВТ
[0087] Кроме того, указанные уравнения могут быть выполнены и использованы для нахождения скорости звука без приближенных значений задержек:
[0088] 9) С=2ID/(tВВ+tТТ-tТВ-tВТ)
[0089] Как отмечено выше, когда в трубе начинает образовываться пустота, что к подтверждается неудачей приема передачи от Т к В, эхо-импульсная передача от Т к Т прекращается, как и раздельно-совмещенная передача от В к Т. В частично наполненной трубе эти передачи бесполезны. Передачи от Т к Т и от В к Т возобновляются только, когда труба заново наполнена и возобновлены успешные передачи от Т к В.
[0090] В обеих конфигурациях настоящего изобретения использован тот же алгоритм для преобразования высоты L уровня воды в долю пустот по плоскости (см. фиг.3). При заданном уровне L воды указанная площадь АVOID пустоты задается посредством (Эшбах, Справочник основ машиностроения, Раздел 2, Таблица 1b [Eshbach, Handbook of Engineering Fundamentals, Section 2, Table 1b], включено в этот документ по ссылке):
[0091] 6) AVOID=ID2/8[2φ-sin(2φ)]
[0092] Указанная доля пустот по плоскости, обозначенная VF, получена путем деления уравнения (6) на площадь трубы, π ID2/4;
[0093] 6А) VF=1/(2π)×[2φ-sin(2φ)]
[0094] Указанный угол φ задан следующим образом:
[0095] 7) φ=arccos (2L/ID-1)
[0096] На фиг.4 показан график доли пустоты как функции уровня, нормализованной к внутреннему диаметру трубы.
|
|
[0099] Настоящее изобретение подробно описано в вышеизложенных вариантах его реализации с целью приведения примеров, однако настоящее изобретение не ограничено указанными вариантами реализации и относительно них могут быть выполнены различные модификации, не выходящие за пределы сущности и объема настоящего изобретения, определяемых прилагаемой формулой изобретения.