Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК В УСЛОВИЯХ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ НАВИГАЦИОННОГО СИГНАЛА
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано при построении гидроакустических навигационных систем с ультракороткой базой.
Известен способ обнаружения шумящих в море объектов в фиксированном частотном диапазоне, при котором принимают шумовые сигналы в горизонтальной и вертикальной плоскостях многоэлементной антенной решеткой гидролокатора и осуществляют первичную обработку, для чего преобразуют в цифровую форму напряжения шумовых сигналов антенной решетки, выполняют преобразование Фурье отсчетов напряжений шумовых сигналов антенной решетки, вычисляют для каждого из полученных частотных отсчетов амплитудные и фазовые коэффициенты синфазного сложения напряжений сигналов антенной решетки, суммируют выходные напряжения сигналов антенной решетки с постоянными весами, равными произведению амплитудных и фазовых коэффициентов, чем образуют пространственные каналы наблюдения в горизонтальной и вертикальной плоскостях, квадрируют и осуществляют вторичную обработку на каждом цикле обзора, для чего суммируют по всем частотным отсчетам выходные напряжения образованных пространственных каналов в фиксированном частотном диапазоне, усредняют по времени, центрируют и нормируют шумовые сигналы к помехе, осуществляют наблюдение на каждом цикле обзора полученных отметок принятых шумовых сигналов и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха, отличающийся тем, что на каждом цикле обзора до квадрирования для каждого частотного отсчета формируют адаптивные пространственные каналы наблюдения, каждый из которых образован, по крайней мере, тремя смежными пространственными каналами в горизонтальной или в вертикальной плоскости, для чего формируют взаимные спектры мощности между шумовыми сигналами пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения, накапливают взаимные спектры мощности шумовых сигналов для заданного времени накопления, составляют матрицу накопленных взаимных спектров мощности шумовых сигналов и осуществляют ортогональное преобразование матрицы, вычисляют векторы фазовых коэффициентов синфазного сложения сигналов пространственных каналов, участвующих в формировании адаптивного пространственного канала наблюдения, вычисляют вектор выходных напряжений пространственных каналов, участвующих в формировании адаптивного пространственного канала путем решения векторно-матричного уравнения для ортогонально преобразованной матрицы накопленных взаимных спектров мощности и вектора фазовых коэффициентов синфазного сложения сигналов, квадрирование производят, вычисляя отклик полученного адаптивного пространственного канала наблюдения, равного обратной величине суммы квадратов элементов вектора выходных напряжений, а вторичную обработку осуществляют для выходных напряжений адаптивных пространственных каналов наблюдения (см. описание изобретения к патенту РФ №2339050, МПК G01S 3/80, G01S 15/04, публикация 20.11.2008).
Недостатками известного способа являются необходимость применения антенной решетки с большой апертурой для различения прямого и отраженных лучей принимаемого сигнала, невозможность его применения в случае использования ограниченных аппаратных ресурсов.
Известен способ адаптивной пространственной фильтрации сигналов, заключающийся в приеме сигналов в N пространственно разнесенных точках, где N≥2, расчете весовых коэффициентов, взвешенном суммировании принятых сигналов, в котором генерируют первый и второй опорные сигналы с различными частотами, разделяют каждый из них на N равноамплитудных составляющих, сдвигают по фазе каждую составляющую на предварительно заданную величину фазы, после чего i-й принятый сигнал, где i=1, 2, … N, и i-е составляющие первого и второго опорных сигналов суммируют, причем i-й весовой коэффициент рассчитывают по формуле:
 ,
,
где Wi(t) - текущее значение i-го весового коэффициента;
Vуi - значение i-го управляющего сигнала;
Δt - интервал временной дискретизации;
Y(t) - взвешенно суммированный сигнал;
Zi(t) - суммарный сигнал от сложения i-го принятого сигнала и i-x составляющих первого и второго опорных сигналов;
* - обозначение операции комплексного сопряжения;
µ - коэффициент усиления (передачи), а частоты первого ω1 и второго ω2 опорных сигналов выбирают из условия ω1<(ω0-Δω), ω2<(ω0+Δω), где ω0 и Δω соответственно несущая частота и ширина спектра принимаемого полезного сигнала (см. описание изобретения к патенту РФ №2141706, МПК H01Q 21/00, публикация 20.11.1999).
Недостатком указанного выше способа является использование адаптивного фильтра, не учитывающего прием сигнала, прошедшего через многолучевой гидроакустический канал.
Известен способ формирования диаграмм направленности N-элементной линейной эквидистантной антенной решетки, заключающийся в том, что сигналы с элементов антенной решетки усиливают, ограничивают в полосе частот и осуществляют преобразование Фурье каждого сигнала, осуществляют инвертирование преобразованного сигнала первого элемента и его попарное суммирование с преобразованными сигналами последующих элементов, для каждого из полученных (N-1) сигналов измеряют спектральную плотность мощности, умножают их на вещественные весовые коэффициенты An, которые определяют из соотношения
An=sin[nπ(N-1)/N]/n,
где n=1, (N-1),
эти сигналы суммируют и суммарный сигнал подвергают частотной фильтрации, амплитудно-частотную характеристику которой выбирают пропорционально функции
 ,
,
где d - расстояние между соседними элементами;
с - скорость распространения волновых процессов в среде;
α - угол между направлением главного лепестка диаграммы направленности и нормалью к плоскости апертуры (см. описание изобретения к авторскому свидетельству СССР №1327026, МПК G01S 3/80, H01Q 3/26, публикация 30.07.1987).
К недостаткам данного способа можно отнести ограниченность его применения только областью линейных эквидистантных антенных решеток, а значит, с его помощью можно определить либо только горизонтальный, либо только вертикальный угол направления на источник сигнала.
Известен способ обзора пространства гидроакустической системой, включающий прием акустического сигнала в водной среде с помощью
 где β - угол обзора, охватывающий статический веер характеристик направленности антенны, пересекающихся на заданном уровне, а также усреднение во времени сигналов, принимаемых по каждому из направлений пространственной фильтрации, и определение направления на цель, в котором по каждому направлению пространственной фильтрации электрические колебания после их усиления и частотной фильтрации преобразуют в энергетические спектры, которые сопоставляют попарно по соседним направлениям пространственной фильтрации, и определяют направление qx на удаленный источник сигнала из уравнения:
где β - угол обзора, охватывающий статический веер характеристик направленности антенны, пересекающихся на заданном уровне, а также усреднение во времени сигналов, принимаемых по каждому из направлений пространственной фильтрации, и определение направления на цель, в котором по каждому направлению пространственной фильтрации электрические колебания после их усиления и частотной фильтрации преобразуют в энергетические спектры, которые сопоставляют попарно по соседним направлениям пространственной фильтрации, и определяют направление qx на удаленный источник сигнала из уравнения:
 ,
,
где G1(f), G2(f) - энергетические спектры, соответствующие соседним направлениям пространственной фильтрации;
R(Ө х) любая из характеристик направленности статического веера, причем Ө х определяют для каждой из частот спектрального анализа в рабочем диапазоне, после чего усредняют по ансамблю полученные данные, при этом после сопоставления энергетических спектров G1(f) и G2(f) подавляют сигналы в направлениях с меньшими значениями энергетических спектров на всех частотах (см. описание изобретения к патенту РФ №2047278, МПК H04R 1/44, G01S 7/52, публикация 27.10.1995).
К недостаткам данного способа можно отнести необходимость построения веера характеристик направленности антенной решетки, что приводит к необходимости применения антенной решетки с большой апертурой и количеством преобразователей для различения прямого и отраженных лучей принимаемого сигнала и, как следствие, большим аппаратным и вычислительным затратам.
Известен способ подледного приема сигналов спутниковых навигационных систем при нахождении подводного объекта на горизонте плавания с использованием гидроакустического канала передачи навигационной информации, включающий ввод в лед антенны приемника спутниковой навигационной системы в месте приледнения данной антенны к нижней кромке льда, прием этой антенной сигналов космических аппаратов, измерение приемником параметров этих сигналов и по полученным данным определение вычислительным путем искомых поправок к геодезическим счислимым координатам и курсу, вырабатываемых бортовой инерциальной навигационной системой подводного объекта, осуществление путем учета данных поправок коррекции бортовой инерциальной навигационной системы, в котором доставляют от горизонта плавания подводного объекта до места приледнения к нижней кромке льда антенну с приемником сигналов спутниковой навигационной системы и с механизмом внедрения ее в лед, двухканальный маяк-ответчик, который имеет разные коды запроса и разную частоту излучаемого гидроакустического сигнала, измеритель скорости распространения звука в воде и гидростатический датчик, внедряют антенну с приемником сигналов спутниковой навигационной системы в лед в месте ее приледнения к нижней кромке льда с помощью механизма внедрения до момента выхода данной антенны изо льда в воздушную среду, а на подводном объекте используют двухканальную гидроакустическую систему с двумя гидроакустическими приемоизлучающими антеннами, одну приемоизлучающую гидроакустическую антенну устанавливают в заданном месте в корме, а другую гидроакустическую приемоизлучающую антенну устанавливают в заданном месте в носу подводного объекта, при этом две данные антенны располагают вдоль направления его диаметральной плоскости или под известным углом к ней, определяют геодезические координаты маяка-ответчика приемником сигналов спутниковой навигационной системы, в период подъема до нижней кромки льда антенны с приемником сигналов спутниковой навигационной системы и их погружения до подводного объекта измеряют гидростатическое давление воды гидростатическим датчиком, а также скорость звука в воде измерителем скорости звука, а на подводном объекте синхронно излучают в направлении маяка-ответчика сигналы «запроса» одной и второй гидроакустическими приемоизлучающими антеннами и принимают переизлученные сигналы маяка-ответчика данными антеннами, по измеренным параметрам которых определяют вычислительным путем наклонные расстояния от подводного объекта до маяка-ответчика и пеленги на маяк-ответчик из двух заданных мест установки данных двух гидроакустических приемоизлучающих антенн двухканальной навигационной гидроакустической системы (см. описание изобретения к патенту РФ №2398316, МПК H01Q 1/04, публикация 27.08.2009).
К недостаткам данного изобретения можно отнести применение двух гидроакустических приемоизлучающих антенн, которые необходимо установить в носу и корме судна носителя (так называемая система с длинной базой), что не всегда возможно.
Задачами заявляемого изобретения являются:
- использование преимущества сложного навигационного сигнала для выделения прямого акустического луча распространения навигационного сигнала от маяка-ответчика к пеленгационной антенной решетке;
- сокращение аппаратных и вычислительных ресурсов при построении гидроакустической навигационной системы с ультракороткой базой.
Уменьшение вычислительных затрат достигается тем, что в заявляемом способе отсутствует процедура вычисления пространственного спектра или веера диаграмм направленности антенной решетки для всех возможных направлений прихода навигационного сигнала маяка-ответчика. Вместо этого на основе относительных задержек прихода навигационного сигнала, измеренных для пар преобразователей, вычисляется направление прихода сигнала от маяка-ответчика.
Для корректного функционирования предлагаемого способа достаточно использовать пеленгационную антенную решетку из четырех преобразователей, акустические центры которых не лежат в одной плоскости.
Сущность заявляемого изобретения заключается в следующем.
Способ определения направления на гидроакустический маяк-ответчик в условиях многолучевого распространения навигационного сигнала, включающий определение направления одновременно в горизонтальной и вертикальной плоскостях на гидроакустический маяк-ответчик путем приема антенной решеткой сигнала маяка-ответчика, усиления принятого сигнала предварительными усилителями, подключенными к выходу каждого преобразователя антенной решетки, оцифровки с частотой дискретизации Fs, при этом маяк-ответчик излучает в ответ на запрос гидроакустической навигационной системы сложный навигационный сигнал с несущей частотой, подвергнутой фазовой манипуляции по закону кодовой последовательности Гоулда, сигнал, принятый каждым преобразователем антенной решетки, фильтруют цифровым фильтром, согласованным с навигационным сигналом, длительность Т навигационного сигнала выбирают таким образом, чтобы наибольшее доплеровское искажение навигационного сигнала, соответствующее диапазону возможных скоростей движения носителя антенной решетки относительно неподвижного маяка-ответчика, не приводило к рассогласованию фильтра и принятого навигационного сигнала, производят обнаружение навигационного сигнала по превышению заданного порога обнаружения отношением максимального значения огибающей отклика согласованного фильтра на принятый первым преобразователем сигнал к среднеквадратическому значению данной огибающей, для первого канала антенной решетки в огибающей выходного сигнала, являющегося откликом согласованного фильтра на обнаруженный навигационный сигнал, выполняют поиск первого во времени пика, соответствующего прямому лучу распространения навигационного сигнала, для этого производят поиск K наибольших по величине локальных максимумов огибающей, из которых выбирают первый по времени локальный максимум, соответствующий прямому лучу распространения навигационного сигнала, и запоминают его позицию l, для каждого канала антенной решетки вырезают фрагмент отклика согласованного фильтра в позиции от l-[FsD/c] до l+[FsD/c], где D - наибольшее расстояние между преобразователями антенной решетки, с - скорость звука в воде, производят повышение частоты дискретизации найденного фрагмента до 4Fs, выполняют поиск максимума в передискретизированном фрагменте, для каждого из каналов антенной решетки запоминают временное положение

найденного максимума, которое принимают за момент времени прихода навигационного сигнала, распространяющегося по прямому лучу к преобразователю с номером i,
для каждой пары p преобразователей вычисляют разность моментов времени прихода сигнала к преобразователям с номерами ip и jp
 ,
,
в качестве начального приближения горизонтального угла А и вертикального угла Е искомого направления на маяк-ответчик выбирают направление из центра системы координат, связанной с антенной решеткой, на тот гидроакустический преобразователь, для которого временное положение первого максимума огибающей отклика согласованного фильтра ti минимально среди всех преобразователей:

 ,
,
где m - номер преобразователя с минимальным значением ti,
углы А и Е, задающие направление на маяк-ответчик, и их начальные приближения A0 и E0 итерационно обновляют по формулам:
А=А0+ΔA
Е=Е0+ΔЕ′
А0=А
Е0=Е
до тех пор, пока ΔA и ΔЕ не станут меньшими заданного значения точности вычислений ΔА<ε, ΔE<ε,
для чего вычисляют значения приращений ΔА и ΔЕ по формулам:
 ,
,
где величины аа, bb, ab, аТ и bT вычисляют путем расчета для каждой пары p преобразователей с номерами ip и jp следующих величин:
 ,
,  ,
,  ,
,
 ,
,
 ,
,
где
ΔT=Δtp-Δt0p,
 ,
,
 ,
,
 ,
,
полученные таким образом значения горизонтального угла А и вертикального угла Е являются оценкой искомого направления на маяк-ответчик.
Сущность заявляемого изобретения поясняется чертежами:
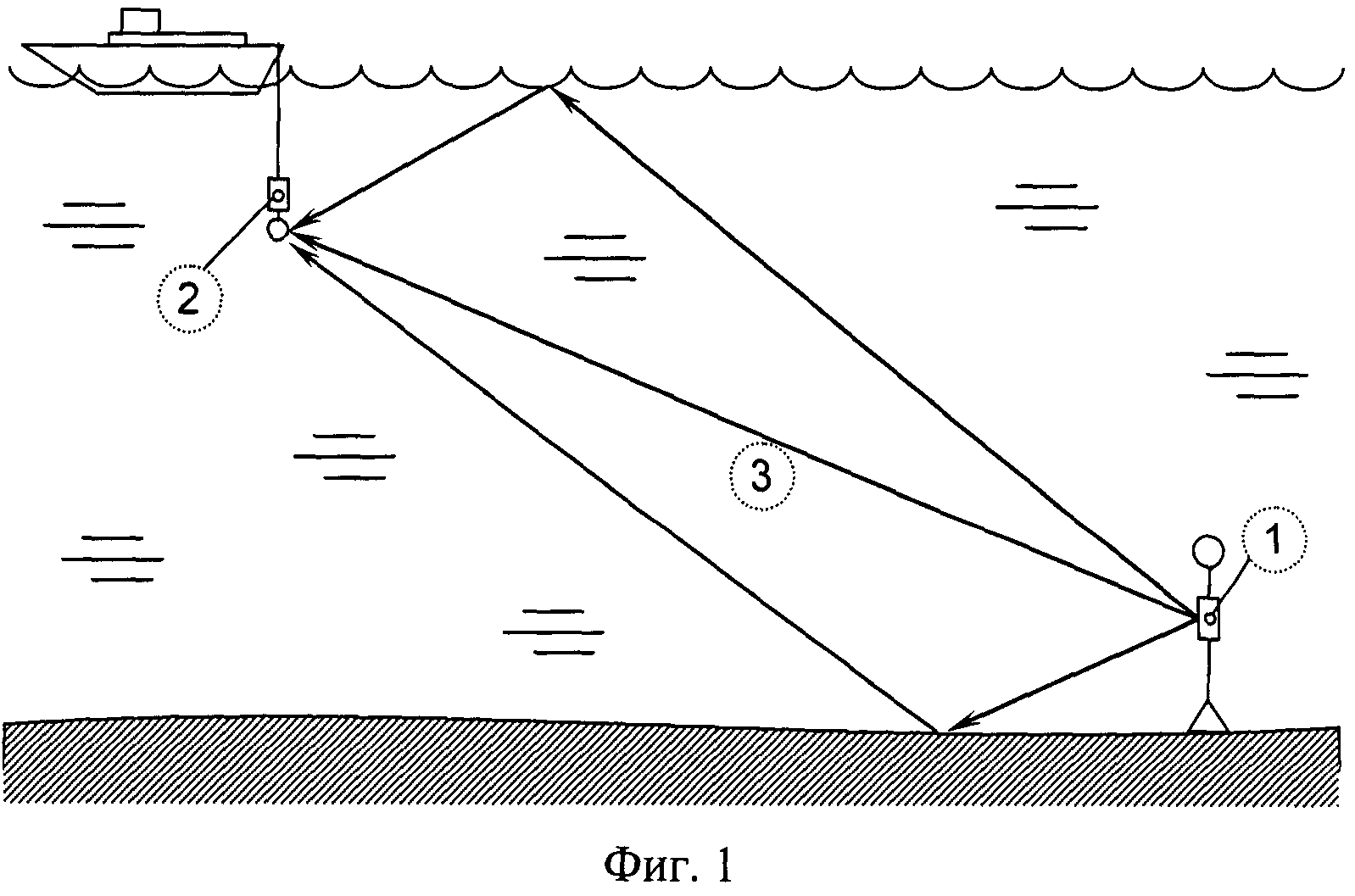
на фиг.1 показана условная схема распространения навигационного сигнала от маяка-ответчика к пеленгационной антенне гидроакустической навигационной системы с ультракороткой базой по трем лучам: прямому и отраженным от дна и поверхности воды, где цифрой 1 обозначен маяк-ответчик, 2 - пеленгационная антенна, 3 - прямой луч распространения навигационного сигнала;
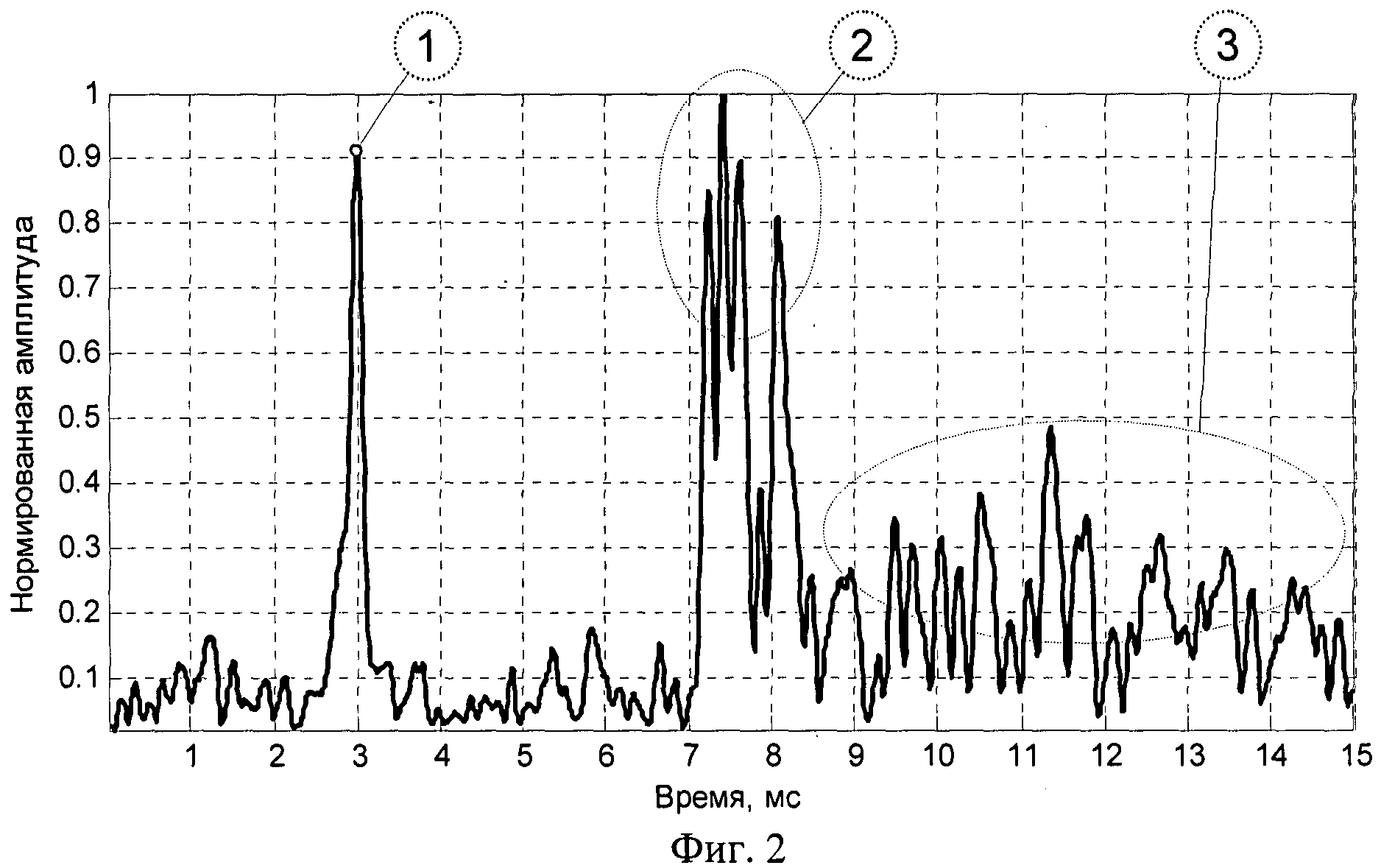
на фиг.2 показана полученная в натурном эксперименте в условиях мелководья огибающая отклика согласованного фильтра на принятый первым преобразователем антенной решетки сложный навигационный сигнал, где цифрой 1 обозначен пик, соответствующий прямому лучу распространения сигнала, 2 - пики, соответствующие отраженным лучам, 3 - реверберационная составляющая;
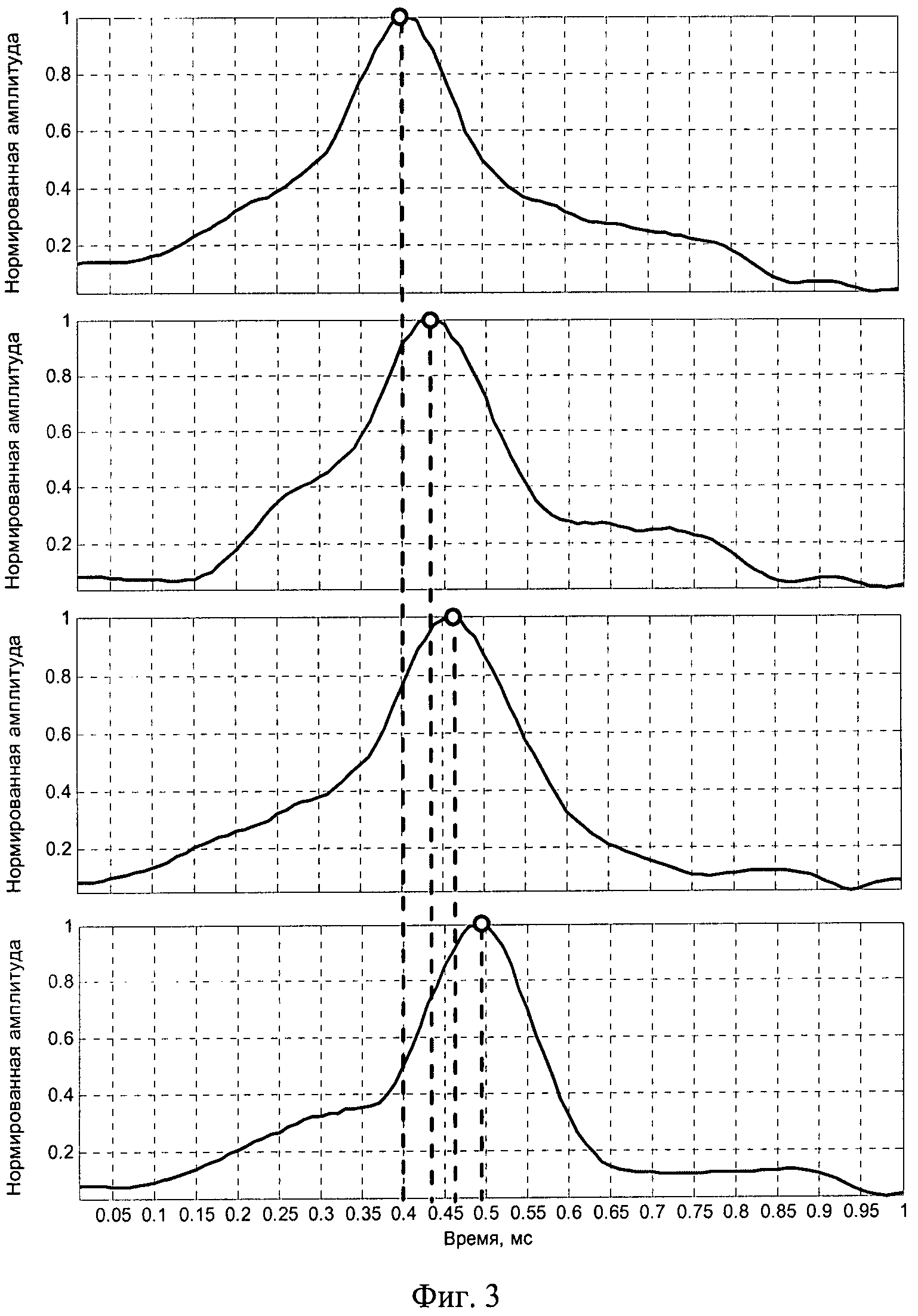
на фиг.3 сопоставлены соответствующие прямому лучу пики огибающих откликов согласованного фильтра на принятый четырьмя преобразователями антенной решетки навигационный сигнал;
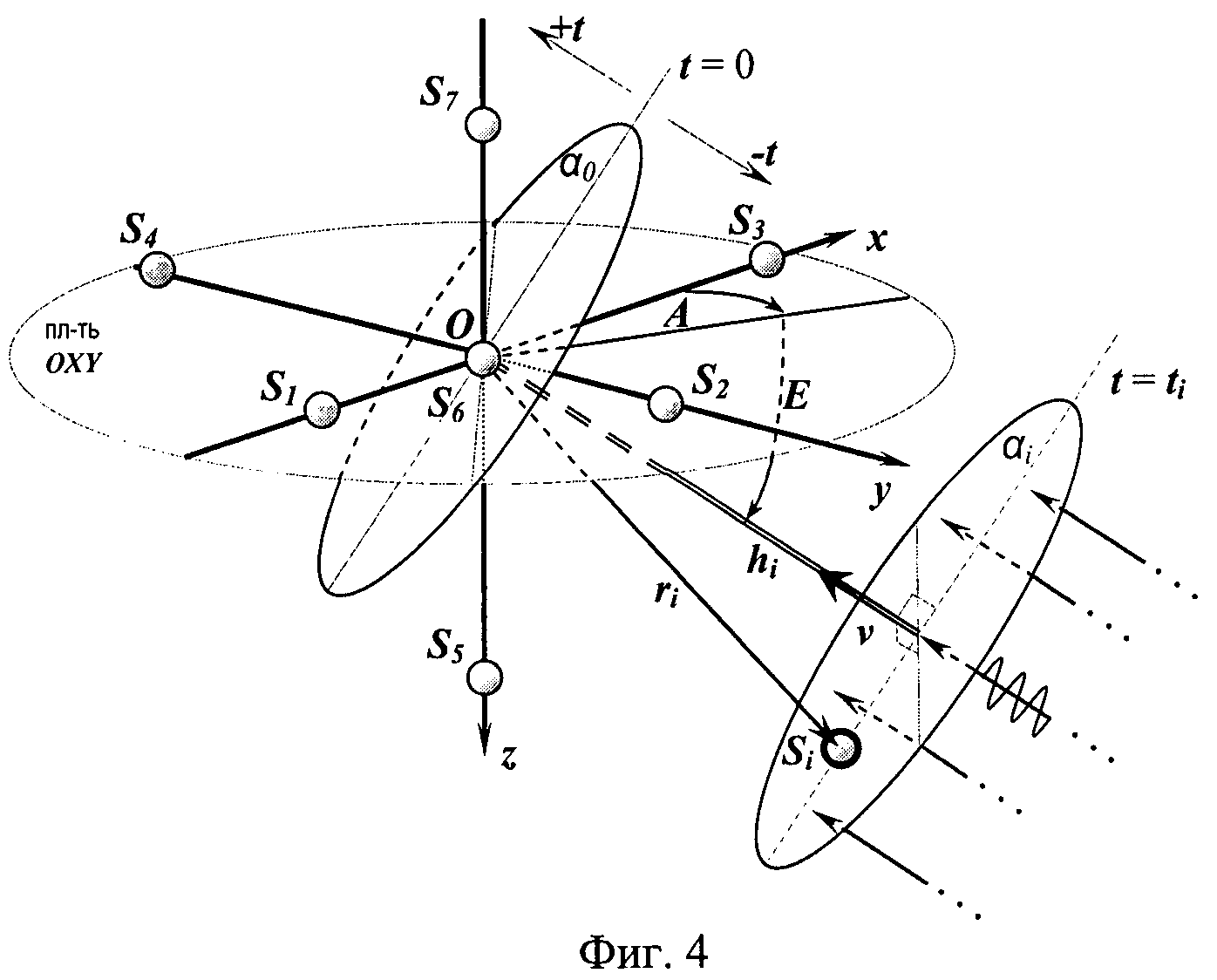
на фиг.4 показана антенная решетка со своей системой координат OXYZ и фронт волны акустического сигнала маяка-ответчика:
S1÷S7, Si - акустические центры преобразователей; α0 - плоскость фронта волны принимаемого антенной сигнала в момент времени t=0, αi - в момент времени t=ti, когда фронт достигает преобразователя Si; ν - нормаль к плоскости фронта волны, ri - радиус-вектор преобразователя Si, hi - расстояние между фронтами волны в момент времени t=ti и t=0; А и Е - горизонтальный и вертикальный углы направления на источник сигнала - гидроакустический маяк-ответчик.
Заявляемый способ осуществляют следующим образом.
Маяк-ответчик в ответ на запрос гидроакустической навигационной системы излучает сложный навигационный сигнал с несущей частотой, подвергнутой фазовой манипуляции по закону кодовой последовательности Гоулда.
Если необходима работа с несколькими маяками, то для их кодового разделения выбирают для каждого маяка-ответчика свой сдвиг между порождающими полиномами при генерации кодовой последовательности Гоулда.
Манипуляцию фазы осуществляют путем умножения амплитуды несущей, имеющей частоту Fc, либо на +1, либо на -1 в соответствии с текущим символом кодовой последовательности, тем самым каждому символу псевдослучайной последовательности будет соответствовать короткий фрагмент несущего колебания, имеющий фазовый сдвиг 0° или 180°. Частоту манипуляции определяют как Fc/N, где N - натуральное число, задаваемое в соответствии с требуемой шириной полосы навигационного сигнала.
Такой выбор навигационного сигнала позволяет на приемной стороне бороться с эффектом многолучевого распространения сигнала в водной среде (см. фиг.1), обусловленным наложением на сигнал, распространяющийся по прямому лучу его копий, отраженных от поверхности воды и дна. В результате большей длины отраженных лучей копии сигнала, соответствующие отраженным лучам, будут задержаны во времени относительно сигнала, соответствующего основному лучу.
Прошедший через гидроакустический канал навигационный сигнал принимают преобразователями антенной решетки, усиливают предварительными усилителями, подключенными к выходу каждого преобразователя антенной решетки, оцифровывают с частотой дискретизации Fs и фильтруют цифровым фильтром, согласованным с навигационным сигналом.
Длительность Т навигационного сигнала выбирают таким образом, чтобы наибольшее доплеровское искажение навигационного сигнала, соответствующее диапазону возможных скоростей движения носителя антенной решетки относительно неподвижного маяка-ответчика, не приводило к рассогласованию фильтра и принятого навигационного сигнала.
По отклику согласованного фильтра, подключенного к первому каналу антенной решетки, производят обнаружение навигационного сигнала по превышению заданного порога обнаружения отношением максимального значения огибающей отклика согласованного фильтра к среднеквадратическому значению данной огибающей.
Для первого канала антенной решетки в огибающей выходного сигнала, являющегося откликом согласованного фильтра на обнаруженный навигационный сигнал, выполняют поиск первого во времени пика, соответствующего прямому лучу распространения навигационного сигнала (см. фиг.2). Для этого производят поиск K наибольших по величине локальных максимумов огибающей, из которых выбирают первый по времени локальный максимум, соответствующий прямому лучу распространения навигационного сигнала, и запоминают его позицию l.
Такая процедура необходима для того, чтобы учесть случай, когда амплитуда пика, соответствующего прямому лучу, окажется меньше амплитуды одного из пиков, соответствующих отраженным лучам.
Для каждого канала антенной решетки вырезают фрагмент отклика согласованного фильтра в позиции от l-[FsD/c] до l+[FsD/c] (см. фиг.3), где D - наибольшее расстояние между преобразователями антенной решетки, с - скорость звука в воде, и производят повышение частоты дискретизации найденного фрагмента до 4Fs.
Принимают допущение, что в найденный фрагмент попадает только один пик, соответствующий найденному прямому лучу (см. фиг.3).
Выполняют поиск максимума в передискретизированном фрагменте, для каждого из каналов антенной решетки запоминают временное положение

найденного максимума, которое принимают за момент времени прихода навигационного сигнала, распространяющегося по прямому лучу к преобразователю с номером i.
Для каждой пары p преобразователей вычисляют разность моментов времени прихода сигнала к преобразователям с номерами ip и jp
 .
.
С пространственной антенной решеткой связывают трехмерную прямоугольную систему координат OXYZ, ось OZ которой направлена вниз. Вертикальный угол отсчитывают от плоскости OXY вниз. Радиус-вектор произвольного преобразователя Si в системе координат OXYZ обозначим как ri=[хiуizi]T.
В описываемом способе делают следующие допущения: каждый преобразователь считают точкой, координаты которой совпадают с акустическим центром преобразователя; ввиду относительной удаленности источника сигнала от антенны по сравнению с расстояниями между преобразователями фронт волны, приходящий к каждому преобразователю, считают плоским.
Направление на источник сигнала задают горизонтальным и вертикальным углами А и Е соответственно в сферической системе координат с началом координат в точке О. Горизонтальный угол А - угол между осью ОХ и проекцией вектора направления на плоскость OXY - отсчитывают от оси ОХ по часовой стрелке, если смотреть на плоскость OXY сверху. Вертикальный угол Е - угол между вектором направления на источник и его проекцией на плоскость OXY - отсчитывают от плоскости OXY вниз (см. фиг.4).
Плоскости фронта волны α0 и αi схематически показаны на фиг.4 эллипсами. Направление на источник сигнала есть нормаль к плоскости фронта волны - вектор ν на фиг.4. Благодаря пространственной удаленности преобразователей фронт волны сигнала от источника излучения достигнет преобразователей в разные моменты времени. Для расчетов необходимы только относительные времена прихода сигнала к преобразователям, поэтому для удобства расчетов за t=0 принимают момент времени, когда плоский фронт волны достигнет точки O - начала системы координат антенной решетки. Фронт волны достигает i-й преобразователь в момент времени t=ti, причем если преобразователь находится ближе к источнику, чем точка О, то знак у ti будет отрицательный, а если дальше - положительный. Расстояние, проходимое плоскостью фронта волны принятого сигнала при распространении между преобразователем номер i и точкой O, задают выражением
hi=-(xicos(E)cos(A)+уicos(E)sin(A)+zisin(E)).
Соответственно, время, за которое фронт волны проходит между преобразователями с номерами i и j в зависимости от направления прихода навигационного сигнала, задаваемого углами A и Е, выражают следующей функцией

где с - скорость звука в воде.
Данную функцию линеаризуют в окрестностях точки (A0, E0) путем разложения в ряд Тэйлора до первого члена
где приняты следующие обозначения:
Δtij=Δtij(A,E),
Δtij0=Δtij(A0,E0) - значение функции в точке с координатами (A0,E0),
Δxij=(xj-xi), Δуij=(уj-уi), Δzij=(zj-zi) - разности координат акустических центров преобразователей.
Обозначив тригонометрическую сумму в первом слагаемом как a ij, а сумму во втором слагаемом как bij, получают
ΔTij=a ijΔE+bijΔA,
где ΔTij=Δtij-Δtij0=Δtij(A,E)-Δtij(A0,E0),
ΔЕ=Е-Е0,
ΔA=А-А0,
 ,
,
 .
.
Для всех пар преобразователей можно составить систему уравнений
Поскольку сигналы принимаются преобразователями антенной решетки на фоне помех, то система уравнений будет несовместна и никакая пара ΔA и ΔE не будет удовлетворять сразу всем уравнениям в системе. Для уравнивания данной системы в каждое уравнение вводят поправку υij. Тогда система уравнений принимает вид:
Задачу определения направления на маяк-ответчик по горизонтальному A и вертикальному углу E по измеренным задержкам Δtij распространения сигнала между преобразователями в каждой паре сводят к решению задачи наименьших квадратов путем минимизации суммы квадратов поправок

относительно ΔA и ΔE.
Минимум  достигается при условии обращения производной функции в ноль. У квадратичной функции он единственен, поэтому составляют систему уравнений
достигается при условии обращения производной функции в ноль. У квадратичной функции он единственен, поэтому составляют систему уравнений
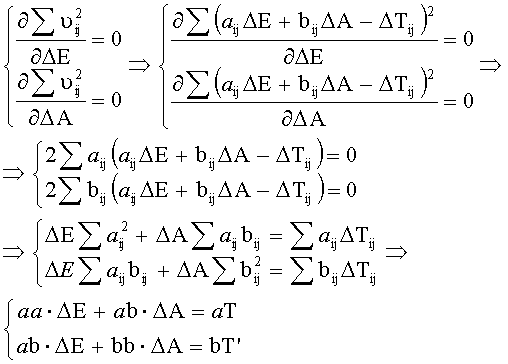
где  ,
,  ,
,  ,
,  ,
,  .
.
Решение данной системы уравнений имеет вид
 .
.
Таким образом, процедура вычисления значения углов A и E состоит в следующем:
- для каждой пары p преобразователей по отклику согласованного фильтра каналов антенной решетки ip и jp вычисляют значение Δtp;
- в качестве начального приближения горизонтального угла A и вертикального угла E искомого направления на маяк-ответчик выбирают направление из центра системы координат, связанной с антенной решеткой, на тот гидроакустический преобразователь, для которого временное положение первого максимума огибающей отклика согласованного фильтра ti минимально среди всех преобразователей:
 ,
,
где m - номер преобразователя с минимальным значением ti;
- углы A и E, задающие направление на маяк-ответчик, и их начальные приближения A0 и E0 итерационно обновляют по формулам:
А=A0+ΔA
E=E0+ΔE′
A0=A
E0=E
до тех пор, пока ΔA и ΔE не станут меньшими заданного значения точности вычислений ΔA<ε, ΔE<ε,
для чего вычисляют значения приращений ΔA и ΔE по формулам:
,
где величины aa, bb, ab, aT и bT вычисляют путем расчета для каждой пары p преобразователей с номерами ip и jp следующих величин:
,
,
,
,
,
где
ΔT=Δtp-Δt0p,
,
,
,
полученные таким образом значения горизонтального угла A и вертикального угла E являются оценкой искомого направления на маяк-ответчик.
Заявленное изобретение позволяет использовать преимущества сложного навигационного сигнала для выделения прямого акустического луча распространения навигационного сигнала от маяка-ответчика к пеленгационной антенне и сократить аппаратные и вычислительные ресурсы при построении гидроакустической навигационной системы с ультракороткой базой.
Способ определения направления на гидроакустический маяк-ответчик в условиях многолучевого распространения навигационного сигнала, включающий определение направления одновременно в горизонтальной и вертикальной плоскостях на гидроакустический маяк-ответчик, путем приема антенной решеткой сигнала маяка-ответчика, усиления принятого сигнала предварительными усилителями, подключенными к выходу каждого преобразователя антенной решетки, оцифровки с частотой дискретизации F, отличающийся тем, что маяк-ответчик излучает в ответ на запрос гидроакустической навигационной системы сложный навигационный сигнал с несущей частотой, подвергнутой фазовой манипуляции по закону кодовой последовательности Гоулда, сигнал, принятый каждым преобразователем антенной решетки, фильтруют цифровым фильтром, согласованным с навигационным сигналом, длительность Т навигационного сигнала выбирают таким образом, чтобы наибольшее доплеровское искажение навигационного сигнала, соответствующее диапазону возможных скоростей движения носителя антенной решетки относительно неподвижного маяка-ответчика, не приводило к рассогласованию фильтра и принятого навигационного сигнала, производят обнаружение навигационного сигнала по превышению заданного порога обнаружения отношением максимального значения огибающей отклика согласованного фильтра на принятый первым преобразователем сигнал к среднеквадратическому значению данной огибающей, для первого канала антенной решетки в огибающей выходного сигнала, являющегося откликом согласованного фильтра на обнаруженный навигационный сигнал, выполняют поиск первого во времени пика, соответствующего прямому лучу распространения навигационного сигнала, для этого производят поиск К наибольших по величине локальных максимумов огибающей, из которых выбирают первый по времени локальный максимум, соответствующий прямому лучу распространения навигационного сигнала, и запоминают его позицию l, для каждого канала антенной решетки вырезают фрагмент отклика согласованного фильтра в позиции от l-[FD/c] до l+[FD/c], где D - наибольшее расстояние между преобразователями антенной решетки, с - скорость звука в воде, производят повышение частоты дискретизации найденного фрагмента до 4F, выполняют поиск максимума в передискретизированном фрагменте, для каждого из каналов антенной решетки запоминают временное положение найденного максимума, которое принимают за момент времени прихода навигационного сигнала, распространяющегося по прямому лучу к преобразователю с номером i,для каждой пары p преобразователей вычисляют разность моментов времени прихода сигнала к преобразователям с номерами i и j ,в качестве начального приближения горизонтального угла A и вертикального угла E искомого направления на маяк-ответчик выбирают направление из центра системы координат, связанной с антенной решеткой, на тот гидроакустический преобразователь, для которого временное положение первого максимума огибающей отклика согласованного фильтра t минимально среди всех преобразователей: где m - номер преобразователя с минимальным значением t,углы A и E, задающие направление на маяк-ответчик, и их начальные приближения A и E итерационно обновляют по формулам:А=А+ΔA,Е=Е+ΔЕА=АЕ=Едо тех пор, пока ΔA и ΔE не станут меньшими заданного значения точности вычислений ΔA<ε, ΔE<ε,для чего вычисляют значения приращений ΔA и ΔE по формулам: где величины , bb, b, Т и bT вычисляют путем расчета для каждой пары p преобразователей с номерами i и j следующих величин: , , , , ,гдеΔT=Δt-Δt, , , ,полученные таким образом значения горизонтального угла A и вертикального угла E являются оценкой искомого направления на маяк-ответчик.

Способ определения направления на гидроакустический маяк-ответчик по горизонтальному и вертикальному углу
Сферическая гидроакустическая антенна
Способ борьбы с гармонической помехой при автокорреляционном методе приема информации с использованием шумоподобных сигналов
Способ передачи дискретной информации по гидроакустическому каналу связи в условиях многолучевого распространения сигнала
Сферическая гидроакустическая антенна
Способ борьбы с гармонической помехой при автокорреляционном методе приема информации с использованием шумоподобных сигналов
Способ передачи дискретной информации по гидроакустическому каналу связи в условиях многолучевого распространения сигнала
Способ обнаружения сигнала в многолучевом канале с постоянным уровнем ложных тревог

