Результат интеллектуальной деятельности: СПОСОБ НАВЕДЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Предлагаемое изобретение относится к области вооружения и военной техники, в частности к области обеспечения наведения беспилотных летательных аппаратов (БЛА) типа управляемых авиабомб и управляемых ракет класса «воздух-поверхность» на стационарные наземные цели.
Данное изобретение может быть использовано в системах наведения БЛА на наземные цели на различных этапах полета БЛА, как предшествующих этапу конечного наведения, так и на этапе конечного наведения.
Известен способ измерения дальности и оптико-электронная система (ОЭС) поиска и сопровождения, используемая в системах точного наведения или целеуказания БЛА (патент РФ №2442997, G01S 17/50).
Данный способ основывается на триангуляционном методе измерения расстояния, а в качестве измерителей углов используются оптические пеленгационные устройства, установленные на базовом расстоянии друг от друга.
Данное изобретение обеспечивает определенное повышение точности измерения дальности, однако обеспечить точность наведения БЛА порядка единиц метров с использованием указанного способа невозможно.
Кроме того, в данном способе коррекция траектории полета производится на основе данных, относящихся к уже пройденному пути, и осуществлять коррекцию траектории полета на этапах, предшествующих этапу конечного наведения, данным способом невозможно.
Наиболее близким по своей технической сущности и достигаемому результату к настоящему изобретению является способ целеуказания по направлению системе наведения управляемого объекта (патент РФ №2117902, F41G 7/34), который выбран в качестве прототипа.
Данный способ целеуказания по направлению системе наведения управляемого объекта предусматривает сравнение в вычислителе БЛА текущей оценки последовательности высот БЛА относительно рельефа на определенных точках определенной траектории его полета, полученной с помощью измерения, с аналогичной последовательностью высот БЛА относительно рельефа на определенных точках определенной траектории его полета на эталонной цифровой карте местности (ЭЦКМ) района цели, которую предварительно подготавливают и вводят в вычислитель БЛА, определение текущего отклонения траектории полета БЛА относительно его траектории полета на ЭЦКМ района цели, после чего с помощью системы автоматического управления производят формирование сигналов ликвидации текущего отклонения траектории полета БЛА от желаемого положения и устанавливают скорректированную траекторию полета БЛК к цели.
При этом сравнение в вычислителе БЛА текущей оценки последовательности высот БЛА относительно рельефа на определенных точках определенной траектории его полета, с аналогичной последовательностью высот БЛА относительно рельефа на определенных точках определенной траектории его полета на ЭЦКМ района цели начинают осуществлять в точке И, которая находится на определенном расстоянии до эталонной точки прицеливания (ЭТП) на ЭЦКМ, что обеспечивает коррекцию траектории полета БЛА уже на участках до точки прицеливания (ТП), то есть предшествующих этапу конечного наведения.
Однако в данном способе измерения производятся дальномером, что не позволяет обеспечить высокую точность измерений, так как круговое вероятное отклонение при данных измерениях составляет порядка сотен метров.
Кроме того, недостатком указанного способа является невысокая чувствительность системы конечного наведения к разноракурсности текущего и эталонного изображений, поскольку при наличии больших ошибок вывода БЛА в район цели эталонное изображение цели, полученное под одним ракурсом, может существенно отличаться от текущего, например, из-за наличия препятствий (масок). При этом эталонные изображения приходится формировать для разных сезонов и различных условий освещенности.
Также при использовании вышеприведенного метода невозможно задать несколько эталонных точек прицеливания (ЭТП), соответствующих определенным диапазонам углов подхода БЛА к цели.
Технической задачей предложенного изобретения является достижение высокой точности доставки БЛА к цели за счет сравнения текущей оценки цифровой карты поля высот местности (ЦКПВМ) района цели с эталонной цифровой картой поля высот местности (ЭЦКПВМ) района цели, при одновременном обеспечении коррекции траектории полета БЛА, а также точки прицеливания (ТП) уже на участках, предшествующих этапу конечного наведения.
Поставленная техническая задача достигается за счет того, что в способе наведения беспилотного летательного аппарата (БЛА) на стационарную наземную цель, предусматривающем определение в вычислителе БЛА текущей оценки последовательности высот БЛА относительно рельефа на определенных точках траектории полета, полученной с помощью измерения, с аналогичной последовательностью высот относительно рельефа на определенных точках траектории полета на эталонной цифровой карте местности (ЭЦКМ) района цели, которую предварительно подготавливают и вводят в вычислитель БЛА, определение текущего отклонения положения БЛА относительно его положения на ЭЦКМ района цели, после чего с помощью системы автоматического управления производят формирование сигналов ликвидации текущего отклонения БЛА от желаемого положения и устанавливают скорректированную траекторию полета к цели, при этом производят сравнение в вычислителе БЛА текущей оценки цифровой карты поля высот местности (ЦКПВМ) района цели с подготовленной заранее и введенной в вычислитель БЛА эталонной цифровой картой поля высот местности (ЭЦКПВМ) района цели, на которой задано положение, по меньшей мере, одной эталонной точки прицеливания (ЭТП), после чего определяют величину пространственного и углового смещения текущей оценки ЦКПВМ относительно ЭЦКПВМ района цели, а также точки прицеливания (ТП) относительно ЭТП и создают управляющие воздействия для коррекции траектории БЛА и положения ТП, при этом для получения текущей оценки ЦКПВМ в районе цели производят с помощью оптико-электронной системы (ОЭС) по меньшей мере два последовательных разноракурсных снимка района цели с известным пространственным смещением (базой) L, определяют на данных снимках углы ε1 и ε2 между направлением на одну и ту же точку А на местности и горизонтальной плоскостью в моменты получения первого и второго снимков и по величине пространственного смещения (базе) L и углам ε1 и ε2 фототриангуляционным способом вычисляют относительную высоту Н, а также координаты X, Y точки А на местности в системе координат, связанной с БЛА, после чего многократно повторяют данную фототриагуляционную обработку вычисления высот Н, а также координат X, Y для множества точек (облака) на местности в районе цели с заданным шагом по продольной и боковой координате.
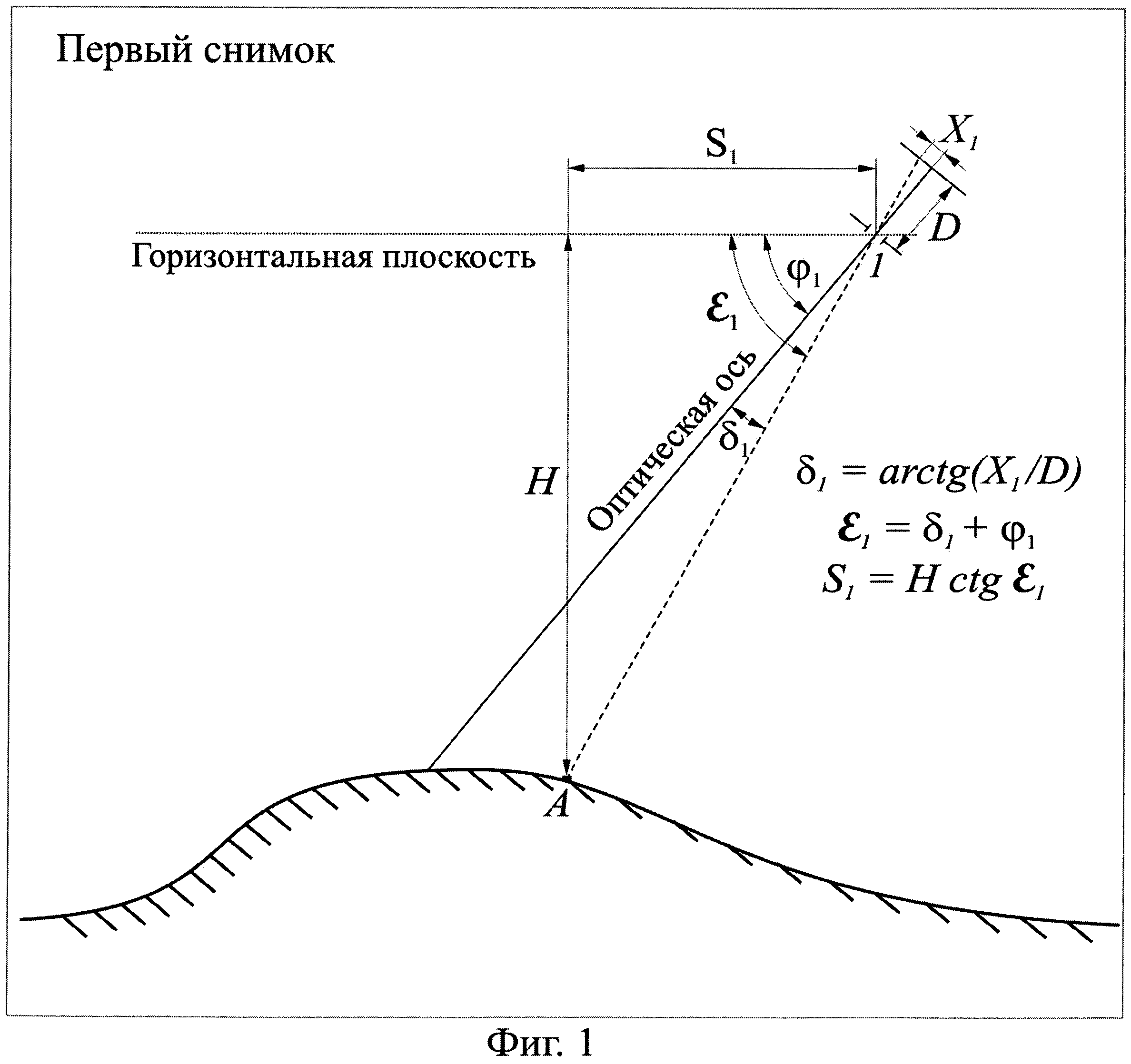
Предпочтительно, чтобы в способе наведения БЛА производили вычисления относительной высоты Н над точкой А на местности в системе координат, связанной с БЛА по формуле:
 ,
,
где L - пространственное смещение (база), расстояние между точками траектории БЛА, в которых получены первый и второй снимки;
ε1 - угол между горизонтальной плоскостью и направлением на точку А на местности при получении первого снимка;
ε2 - угол между горизонтальной плоскостью и направлением на точку А на местности при получении второго снимка.
Целесообразно, чтобы в способе наведения БЛА определяли величину пространственного и углового смещения текущей оценки ЦКПВМ относительно ЭЦКПВМ района цели, а также ТП относительно ЭТП и создавали управляющие воздействия для коррекции траектории БЛА и ТП на этапах полета, не только предшествующих этапу конечного наведения, но и вплоть до окончания процесса конечного наведения.
Желательно, чтобы в способе наведения БЛА для одной цели задавали несколько эталонных точек прицеливания, соответствующих определенным диапазонам углов подхода БЛА к цели.
Для более подробного раскрытия изобретения далее приводится описание конкретных возможных вариантов его исполнения с соответствующими чертежами.
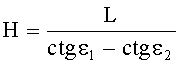
Фиг.1 - первый снимок района цели.
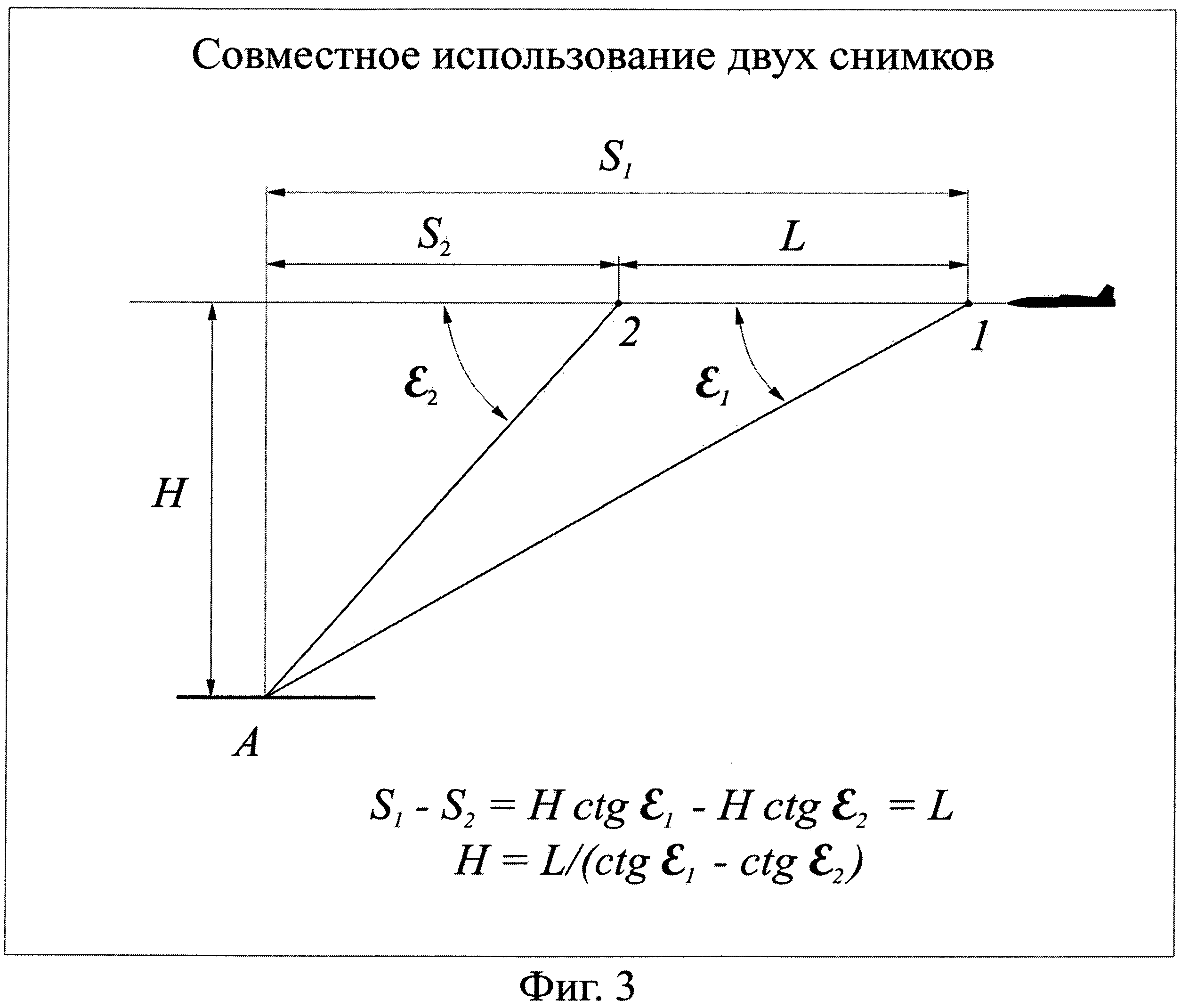
Фиг.2 - второй снимок района цели.
Фиг.3 - совместное использование двух снимков района цели.
Для осуществления способа наведения беспилотного летательного аппарата (БЛА) на стационарную наземную цель предварительно подготавливают и вводят в вычислитель БЛА ЭЦКПВМ района цели, на которой задано положение, по меньшей мере, одной эталонной точки прицеливания (ЭТП). Каждой из ЭТП ставят в соответствие диапазон разрешенных углов подхода БЛА с учетом того, что из-за накопления навигационных ошибок в процессе полета БЛА к объекту поражения выход на цель может реализоваться с различных направлений. Затем в процессе сближения БЛА с объектом поражения производят текущую оценку цифровой карты поля высот местности (ЦКПВМ) района цели. Для этого производят с помощью оптико-электронной системы (ОЭС) по меньшей мере два последовательных разноракурсных снимка района цели с известным пространственным смещением (базой) L (Фиг.1 и Фиг.2). Измеряют расстояние L, пройденное БЛА за промежуток времени между получением двух последовательных снимков. Определяют на данных снимках углы ε1 и ε2 между направлением на одну и ту же точку А на местности и горизонтальной плоскостью в моменты получения первого и второго снимков и по величине пространственного смещения (базе) L и углам ε1 и ε2 фототриангуляционным способом вычисляют относительную высоту Н, а также координаты X, Y точки А на местности в системе координат, связанной с БЛА (Фиг.3), после чего многократно повторяют данную фототриагуляционную обработку вычисления высот Н, а также координат X, Y для множества точек (облака) на местности в районе цели с заданным шагом по продольной и боковой координате, в результате чего получают текущую оценку цифровой карты поля высот участка рельефа местности (ЦКПВМ) в районе цели. Затем в вычислителе БЛА определяют величину пространственного и углового смещения текущей оценки ЦКПВМ относительно ЭЦКПВМ района цели, а также точки прицеливания (ТП) относительно ЭТП и создают управляющие воздействия для коррекции траектории БЛА и положения ТП.
Вычисления относительной высоты Н над точкой А на местности в системе координат, связанной с БЛА, производят по формуле:
где L - пространственное смещение (база), расстояние между точками траектории БЛА, в которых получены первый и второй снимки;
ε1 - угол между горизонтальной плоскостью и направлением на точку А на местности при получении первого снимка;
ε2 - угол между горизонтальной плоскостью и направлением на точку А на местности при получении второго снимка.
Многократное повторение описанной выше процедуры по мере сближения с целью позволяет, вплоть до окончания процесса конечного наведения, уточнять оценку пространственных координат ТП, что обеспечивает высокую точность (порядка одного метра) наведения на цель.
Благодаря тому, что оптическая ось ОЭС может быть направлена вперед-вниз относительно направления полета БЛА, полученная текущая оценка ЦКПВМ может быть сопоставлена с ЭЦКПВМ района цели прежде, чем БЛА минует цель. В связи с этим появляется возможность управлять траекторией полета БЛА на этапе сближения с целью, а также определять направление подхода и выбирать соответствующую ТП одновременно с уточнением положения БЛА предлагаемым способом.
При этом описанный выше вариант осуществления данного способа необходимо считать иллюстративным, а не ограничивающим, причем объем данного изобретения представлен его формулой.
Комплекс подготовки данных для информационно-аналитической системы
Система управления ресурсами образовательного учреждения

