Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области судовождения, в частности к системам автоматического управления движением судна.
Современные авторулевые позволяют управлять движением судна по траекториям, имеющим различную форму. Траектория, по которой должно перемещаться судно, называется исполнительной траекторией и она используется авторулевым как задающий сигнал. Исполнительные траектории могут быть ломаными линиями, сплайновыми кривыми и т.п. Однако, для минимизации бокового отклонения судна от исполнительной траектории, необходимо учитывать физические ограничения, связанные с динамическими параметрами судна. Траектории должны быть как минимум С2 - гладкими функциями на отрезке, т.к. в реальном мире вектор скорости тела не может изменяться мгновенно. Дополнительно, существуют ограничения на диапазон изменения сигнала управления, зависящие от скорости движения судна.
В источнике [1] рассматривается вопрос применения полиномов третьей степени для задания исполнительных траекторий. Однако использование полиномов третьей степени при построении исполнительных траекторий не обеспечивает непрерывность второй производной, кривизны траектории и, следовательно, физическую реализуемость этой траектории, возможные ограничения на диапазон изменения сигнала управления не учитываются.
Наиболее близким к изобретению является устройство для автоматического вывода судна на заданную прямолинейную траекторию прохождения узкого участка фарватера и удержания его на этой траектории, которое содержит автоматический регулятор путевого угла, датчики координат центра масс судна, путевого угла, угловой скорости поворота судна в горизонтальной плоскости, продольной скорости судна, угла перекладки руля, выходы которых соединены соответственно с первым, вторым, третьим, четвертым и пятым входами автоматического регулятора путевого угла, снабженного вычислителем заданных параметров и бокового отклонения с тремя входами, первый вход которого образует одноименный вход автоматического регулятора путевого угла, и вычислителем сигнала управления с шестью входами, второй, третий, четвертый и пятый входы которого образуют одноименные входы автоматического регулятора путевого угла, первый вход которого образован выходом вычислителя заданных параметров движения и бокового отклонения, а выход упомянутого автоматического регулятора, образованный выходом вычислителя сигнала управления, подключен к рулевому приводу, механически связанному с рулем, который механически соединен с датчиком угла перекладки руля и корпусом судна, с которым механически связаны датчики координат центра масс судна, путевого угла, угловой скорости поворота судна в горизонтальной плоскости, продольной скорости судна, блок расчета теоретической траектории перехода из начальной точки на заданную прямолинейную траекторию прохождения узкого участка фарватера с шестью входами и тремя выходами и блок постоянной памяти с тремя выходами, в который записаны параметры заданной траектории прохождения узкого участка фарватера, минимальный радиус кривизны траектории движения судна, коэффициенты закона управления, первый выход которого соединен с шестым входом упомянутого автоматического регулятора, а второй и третий выходы блока постоянной памяти подключены к пятому и шестому входам упомянутого блока расчета теоретической траектории, первый, второй, третий и четвертый входы которого соединены соответственно с выходами датчиков координат центра масс судна, путевого угла, угловой скорости поворота судна в горизонтальной плоскости и продольной скорости, первый и второй выходы упомянутого блока расчета теоретической траектории подключены соответственно к седьмому и восьмому входом автоматического регулятора путевого угла, а третий выход упомянутого блока расчета теоретической траектории служит для формирования сигнала судоводителю (патент RU 2406645 C1, G01C 21/14, опубликован 14.08.2009).
В известном устройстве критерием допустимости сформированной траектории является минимальный радиус кривизны этой траектории. Однако для сформированной допустимой траектории не выполняется проверка необходимого диапазона отклонения рулевого органа. Длины направляющих векторов в граничных точках траектории перевода судна из начальной точки на заданную прямолинейную траекторию являются результатом решения экстремальной задачи, которая должна быть решена во время работы указанного устройства, что увеличивает время подготовки маневра.
Техническим результатом является повышение безопасности перевода судна на параллельный курс.
Указанный технический результат достигается тем, что устройство для формирования траектории перевода судна на параллельный курс содержит задатчик абсолютной величины максимально допустимого сигнала управления, датчик продольной скорости, вычислитель критических параметров траектории перевода судна на параллельный курс с двумя входами и двумя выходами, задатчик расстояния смещения параллельного курса от текущего курса, вычислитель изменения путевого угла Δϕ, минимального радиуса Rm первого допустимого оптимального полиноминального отрезка (ДОЭПО) и длины L прямого отрезка между двумя ДОЭПО с четырьмя входами и двумя выходами, датчик координат центра масс судна, вычислитель набора параметров граничных точек первого ДОЭПО с четырьмя входами и одним выходом, датчик путевого угла, вычислитель выходных параметров элементарных отрезков, составляющих траекторию перевода судна на параллельный курс, с двумя входами и одним выходом, первый вход вычислителя критических параметров траектории перевода судна на параллельный курс соединен с выходом задатчика абсолютной величины максимально допустимого сигнала управления, второй вход вычислителя критических параметров траектории перевода судна на параллельный курс соединен с выходом датчика продольной скорости, первый и второй выходы вычислителя критических параметров траектории перевода судна на параллельный курс соединены со вторым и третьим входами, соответственно, вычислителя изменения путевого угла Δϕ, минимального радиуса Rm первого ДОЭПО и длины L прямого отрезка между двумя ДОЭПО, первый вход вычислителя изменения путевого угла Δϕ, минимального радиуса Rm первого ДОЭПО и длины L прямого отрезка между двумя ДОЭПО соединен с выходом задатчика расстояния смещения параллельного курса от текущего курса, четвертый вход вычислителя изменения путевого угла Δϕ, минимального радиуса Rm первого ДОЭПО и длины L прямого отрезка между двумя ДОЭПО соединен с выходом датчика продольной скорости, первый выход вычислителя изменения путевого угла Δϕ, минимального радиуса Rm первого ДОЭПО и длины L прямого отрезка между двумя ДОЭПО соединен со вторым входом вычислителя набора параметров граничных точек первого ДОЭПО, второй выход вычислителя изменения путевого угла Δϕ, минимального радиуса Rm первого ДОЭПО и длины L прямого отрезка между двумя ДОЭПО соединен со вторым входом вычислителя выходных параметров элементарных отрезков, составляющих траекторию перевода суд на параллельный курс, первый вход вычислителя набора параметров граничных точек первого ДОЭПО соединен с выходом задатчика расстояния смещения параллельного курса от текущего курса, третий вход вычислителя набора параметров граничных точек первого ДОЭПО соединен с выходом датчика координат центра масс судна, четвертый вход вычислителя набора параметров граничных точек первого ДОЭПО соединен с выходом датчика путевого угла, выход вычислителя набора параметров граничных точек первого ДОЭПО соединен с первым входом вычислителя выходных параметров элементарных отрезков, составляющих траекторию перевода судна на параллельный курс, на выходе вычислителя выходных параметров элементарных отрезков формируется траектория перевода судна на параллельный курс, состоящая из первого ДОЭПО и второго ДОЭПО или состоящая из трех элементарных отрезков: первого ДОЭПО, прямого отрезка и второго ДОЭПО (первый и второй ДОЭПО симметричны), которая используется авторулевым как исполнительная траектория в процессе управления движением судна при переводе судна на параллельный курс.
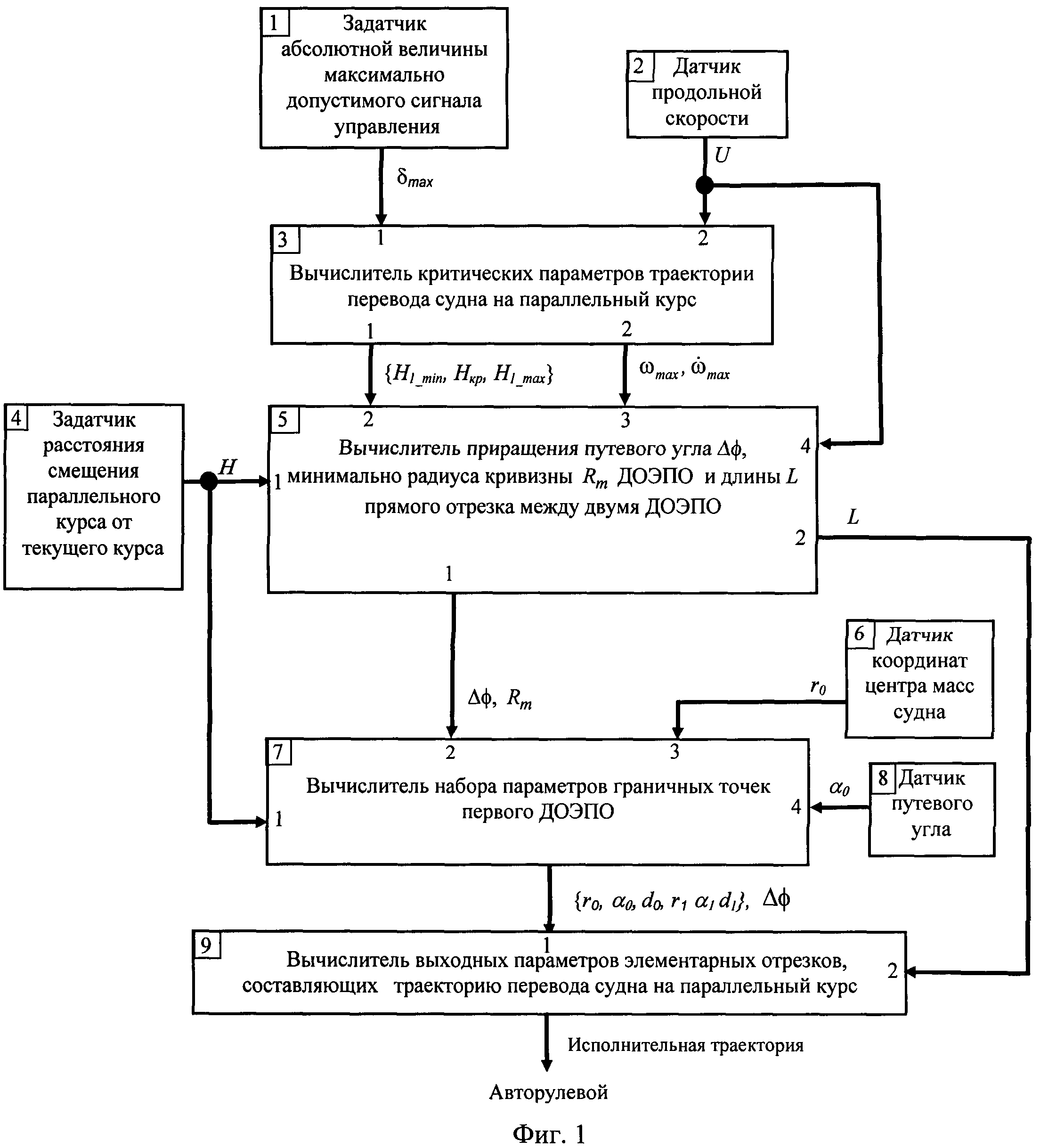
На фиг.1 представлена структурно-функциональная схема устройства для формирования траектории перевода судна на новый курс с соблюдением ограничений на диапазон изменения сигнала управления.
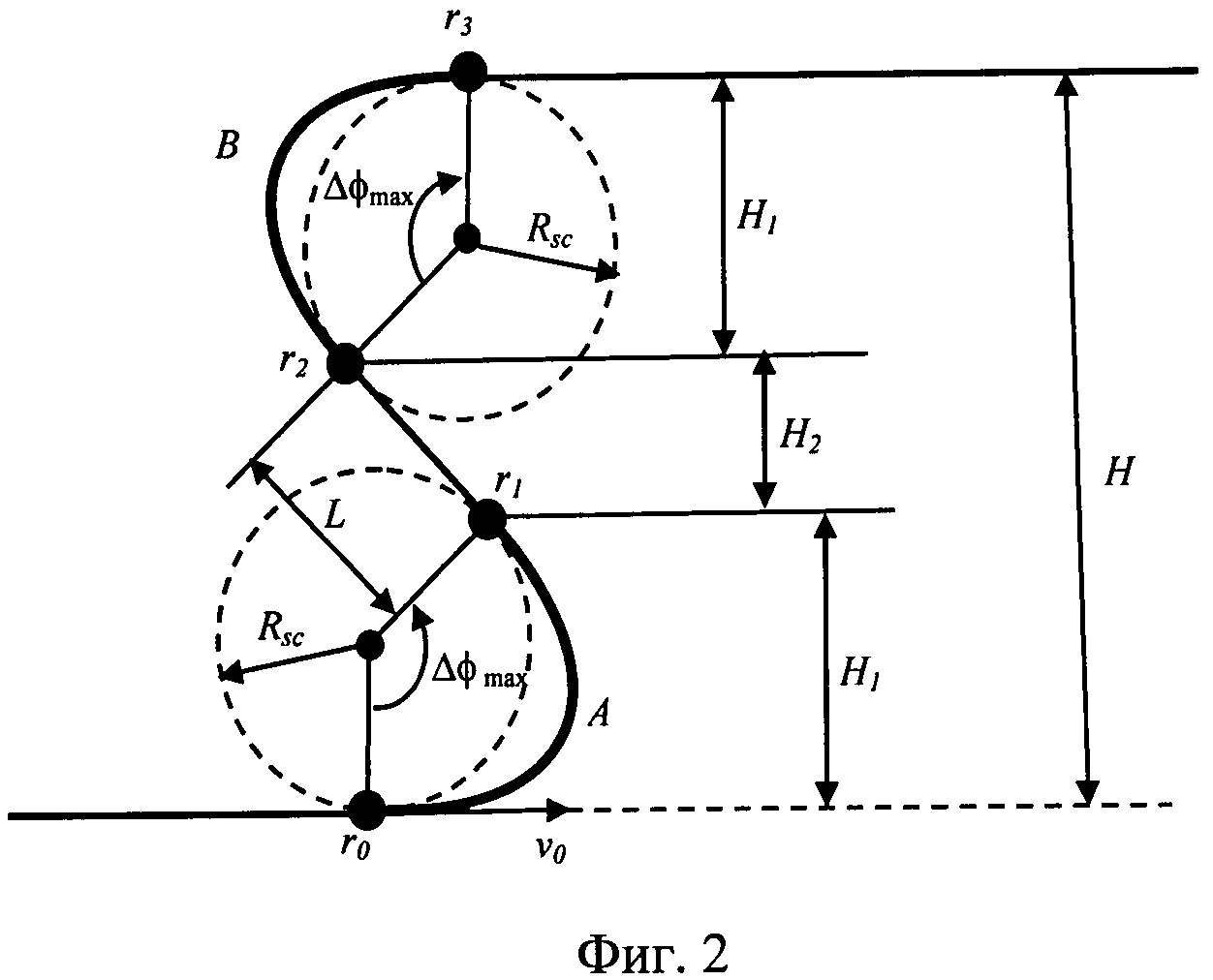
На фиг.2 - траектория перевода судна на параллельный курс, состоящая из трех отрезков: криволинейного r0Ar1 (первый ДОЭПО), прямого отрезка r1r2 и криволинейного r2Br3 (второй ДОЭПО).
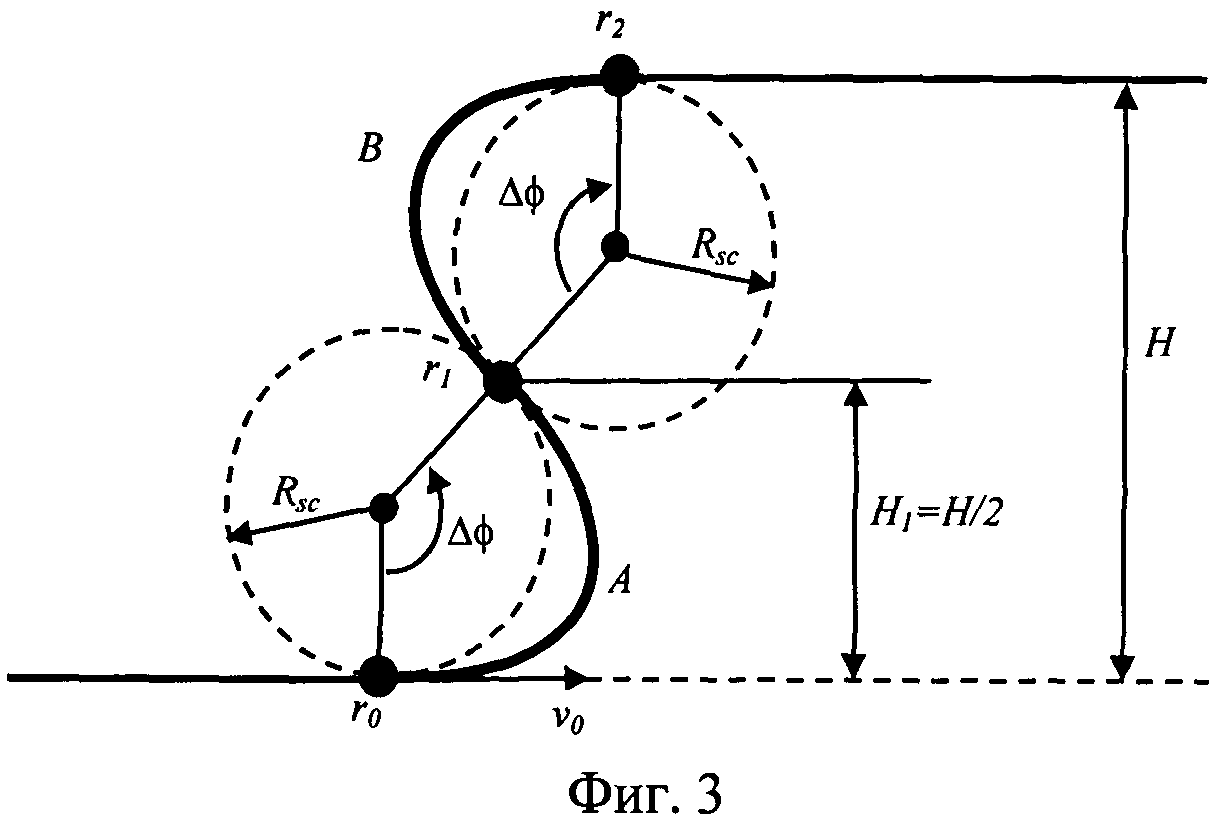
На фиг.3 - траектория перехода на параллельную траекторию, состоящую из двух криволинейных отрезков r0Ar1 (первый ДОЭПО) и r1Br2 (второй ДОЭПО).
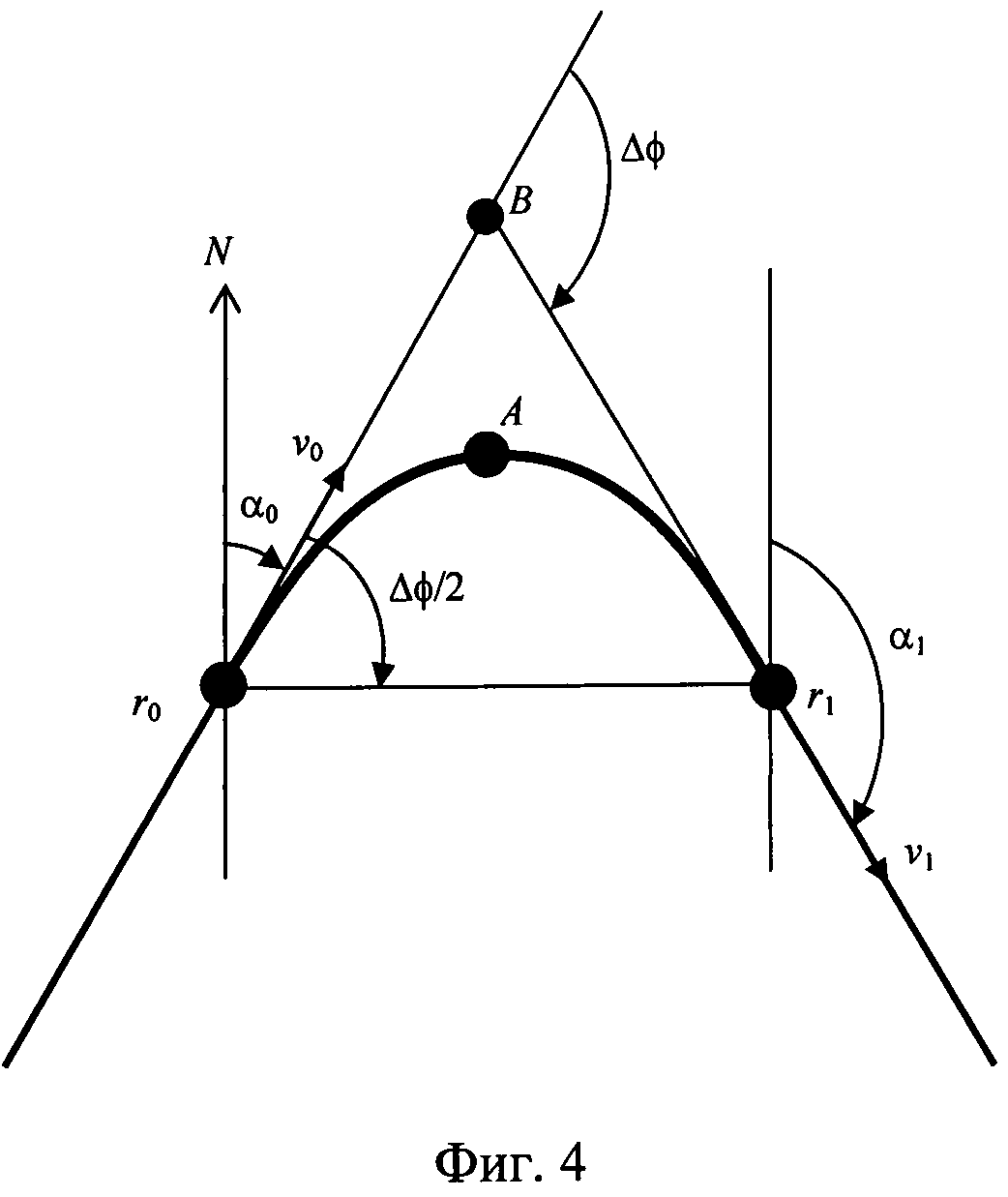
На фиг.4 - основные параметры криволинейного отрезка траектории.
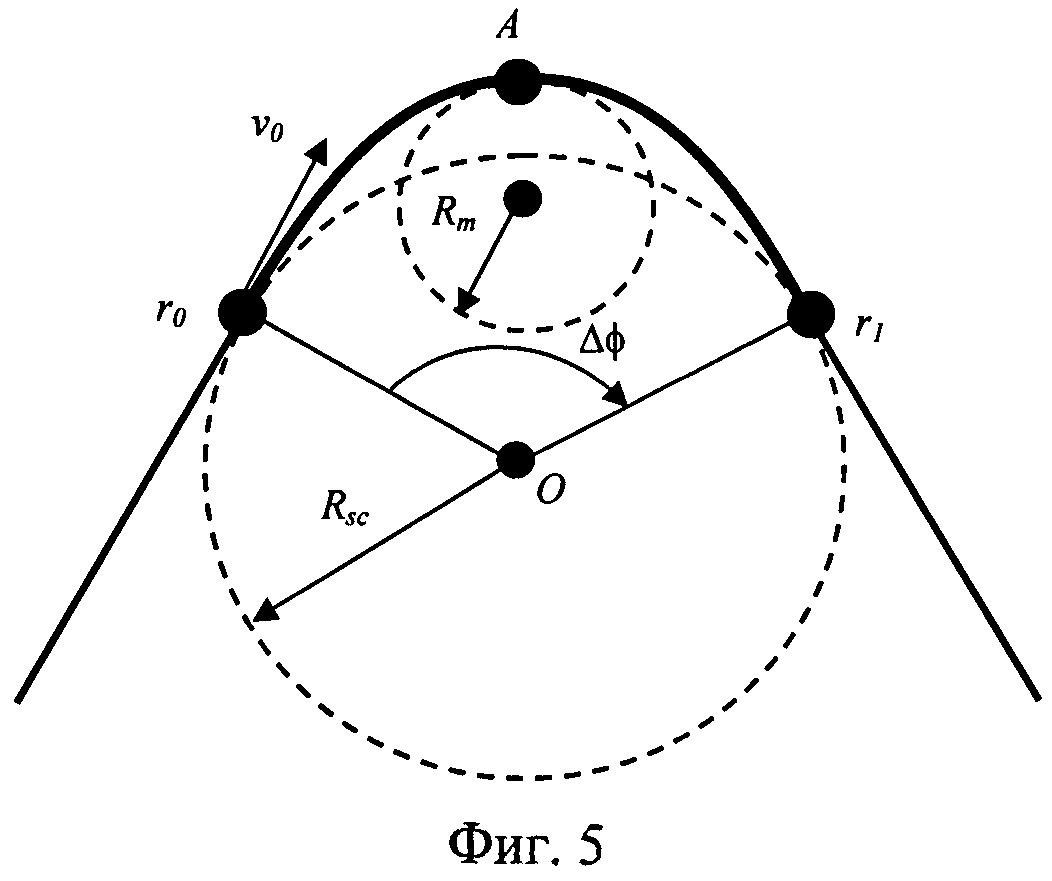
На фиг.5 - элементарный полиномиальный отрезок r0Ar1, обеспечивающий изменение путевого угла на Δϕ, где Rsc - радиус задающей окружности отрезка r0Ar1, Rm - минимальный радиус кривизны отрезка r0Ar1.
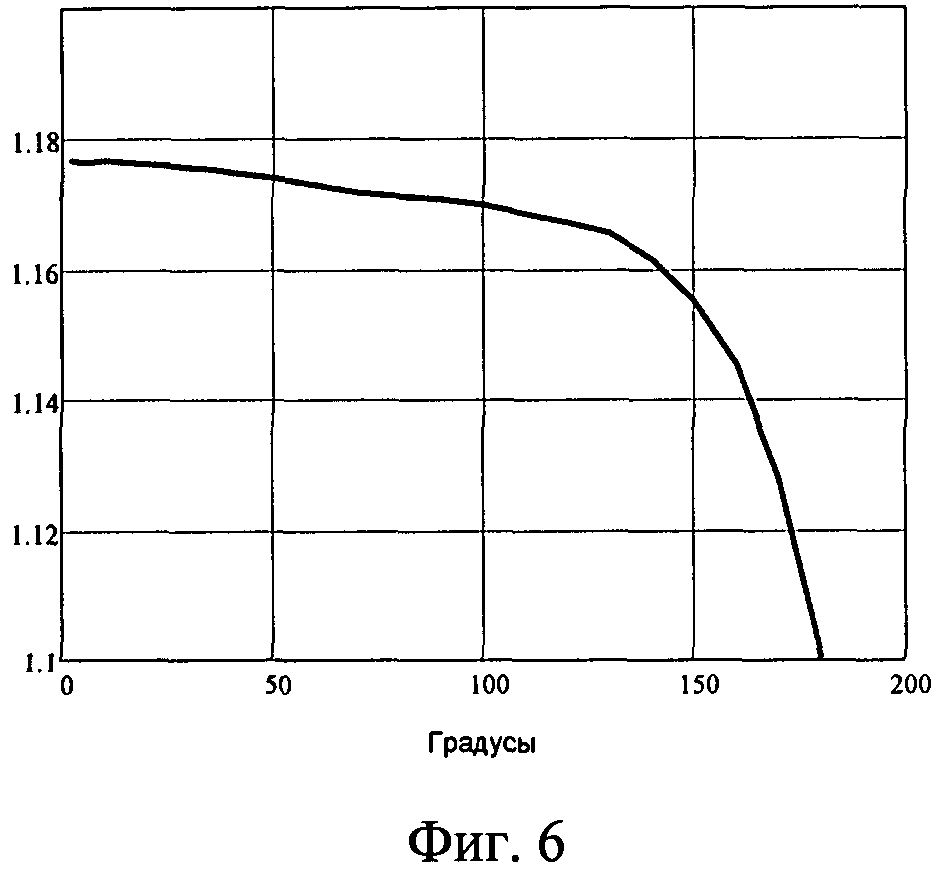
На фиг.6 - график функции rsc(Δϕ).
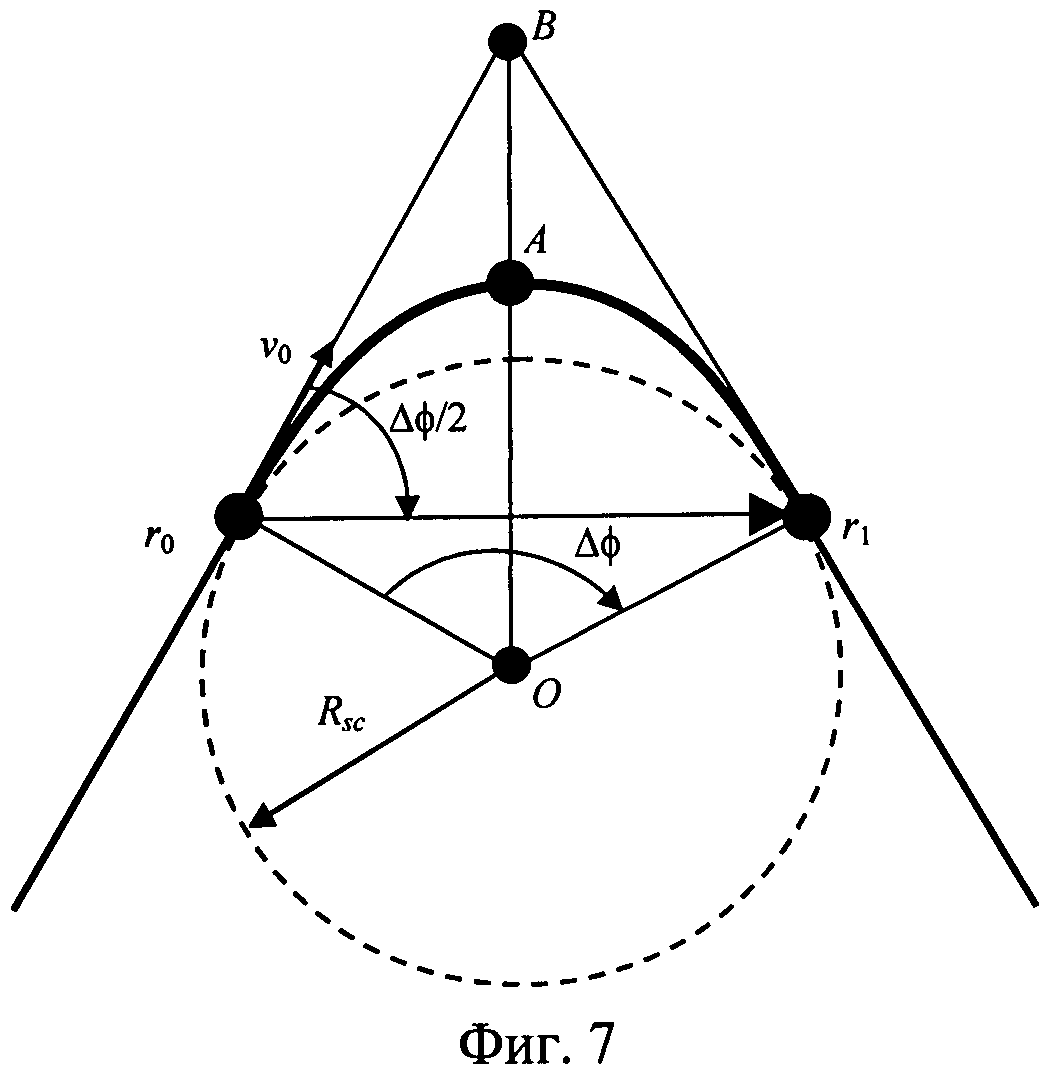
На фиг.7 - вычисление координат граничной точки r1 ОЭПО (ОЭПО частный случай ДОЭПО) r0Ar1 .
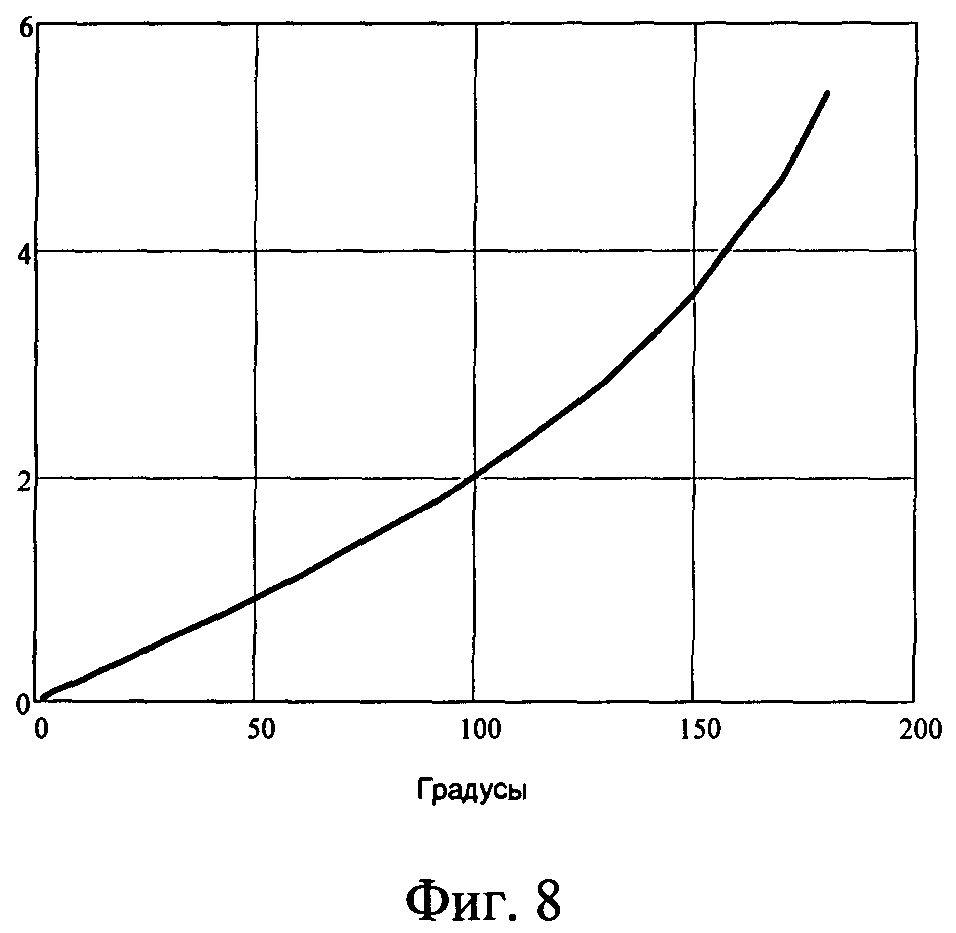
На фиг.8 - график сервисной функции d1(Δϕ).
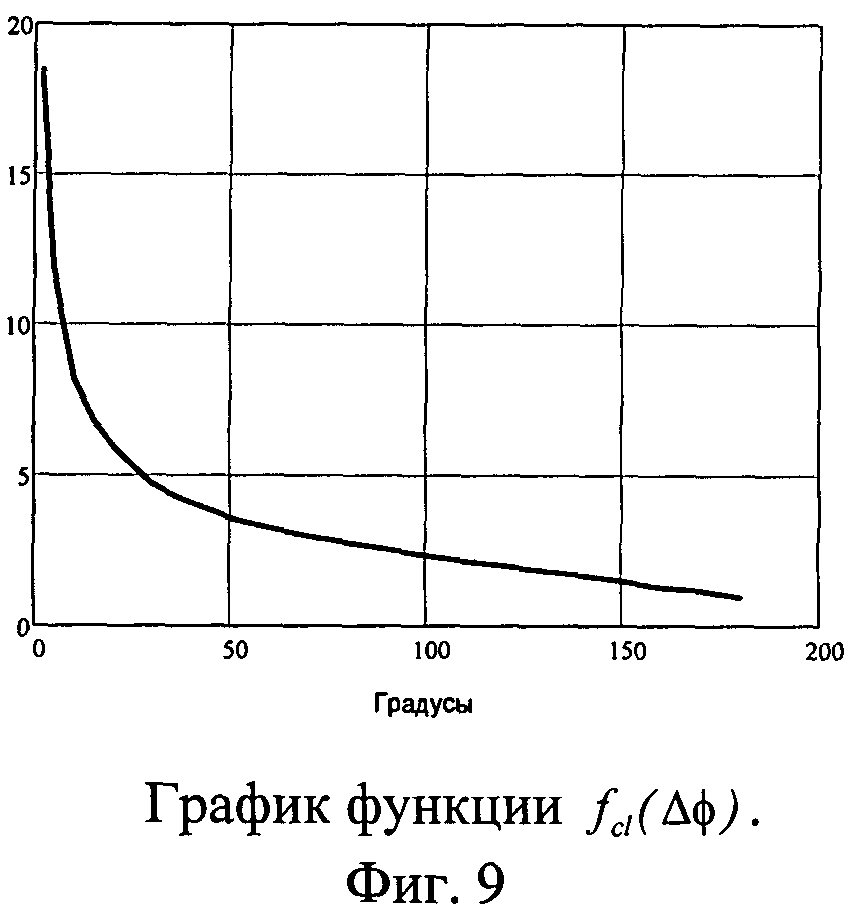
На фиг.9 - График функции ƒcl(Δϕ).
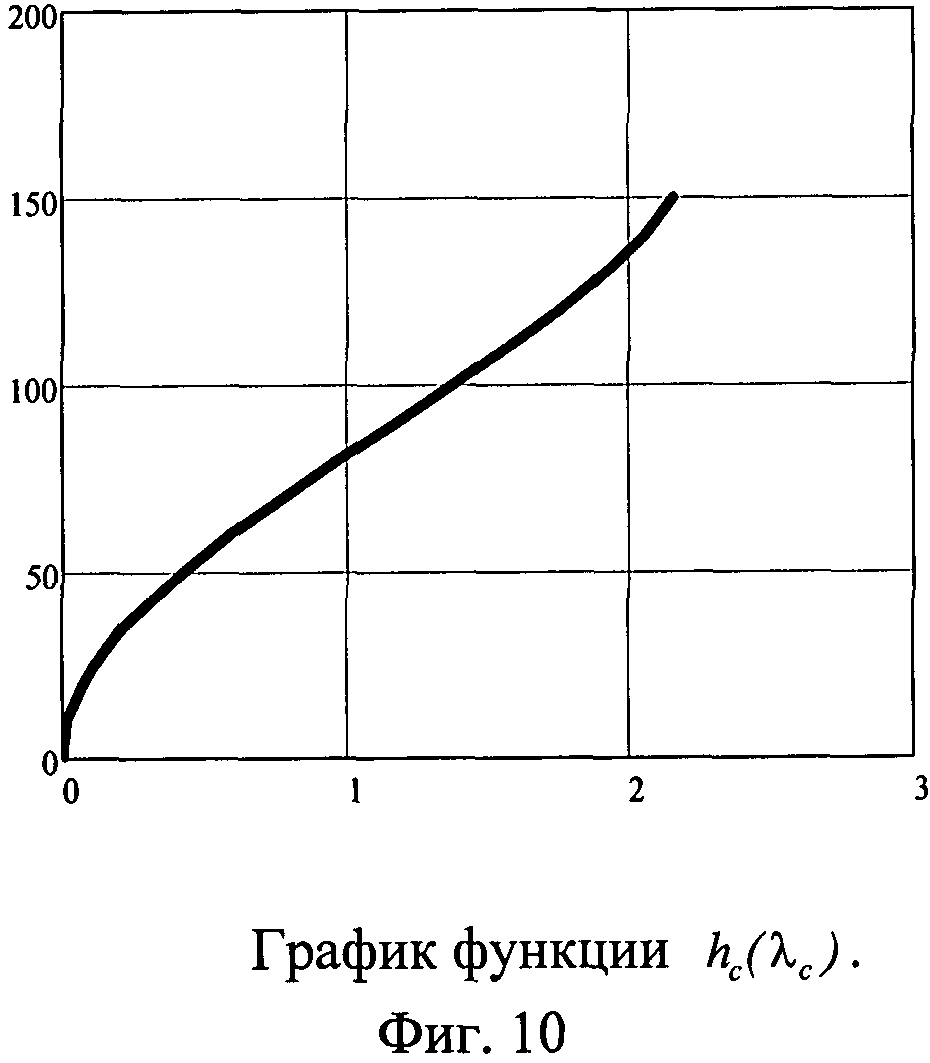
На фиг.10 - График функции hc(λc).
На фиг.11 - График функции hb(λb).
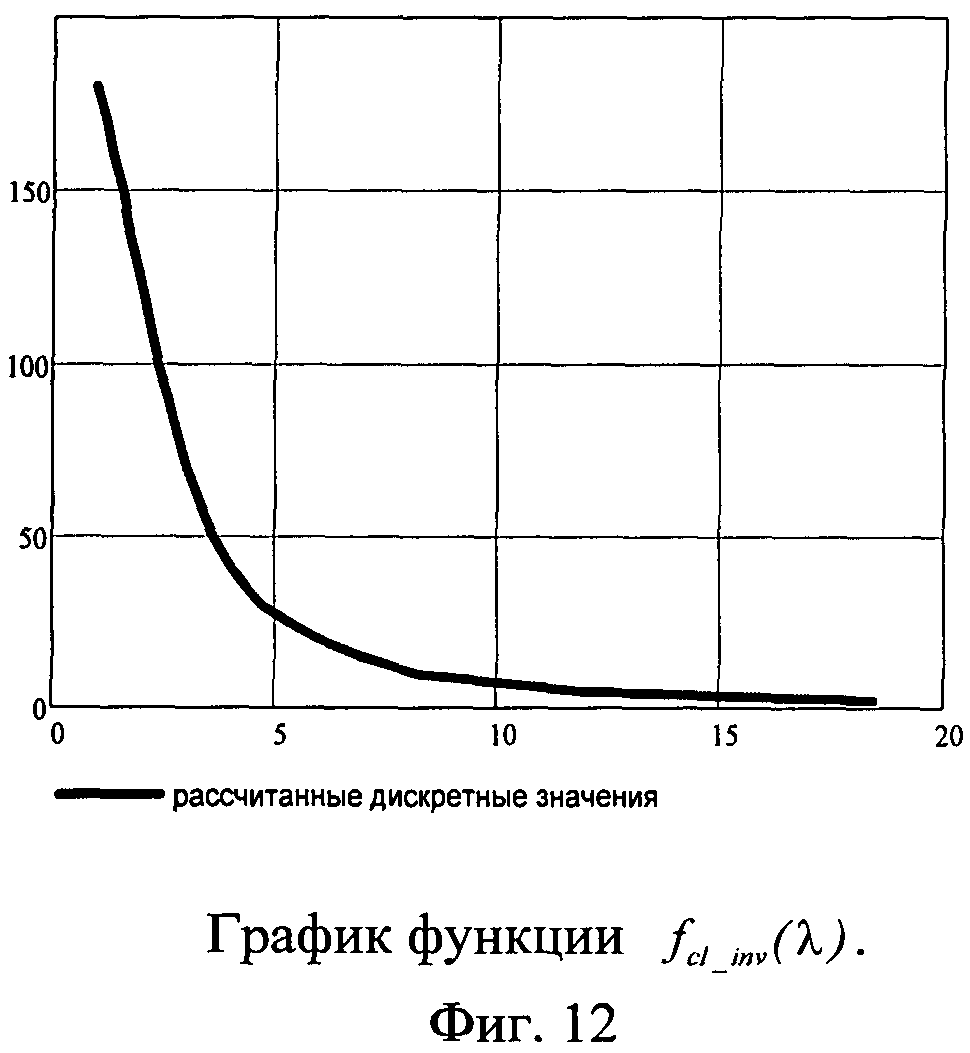
На фиг.12 - График функции fcl_jnv(λ).
Устройство для формирования траектории перевода судна на параллельный курс с соблюдением ограничений на диапазон изменения сигнала управления содержит задатчик 1 (фиг.1) абсолютной величины максимально допустимого сигнала управления, датчик 2 продольной скорости, вычислитель 3 критических параметров траектории перевода судна на параллельный курс с двумя входами и двумя выходами, задатчик 4 расстояния смещения параллельного курса от текущего курса, вычислитель 5 приращения путевого угла Δϕ, минимального радиуса кривизны Rm первого ДОЭПО, и длины L прямого отрезка между двумя ДОЭПО, с четырьмя входами и двумя выходами, датчик 6 координат центра масс судна, вычислитель 7 набора параметров граничных точек первого ДОЭПО с четырьмя входами и одним выходом, датчик 8 путевого угла, вычислитель 9 выходных параметров элементарных отрезков, составляющих траекторию перевода судна на параллельный курс, с двумя входами и одним выходом.
Выход задатчика 1 связан с первым входом вычислителя 3, выход датчика 2 связан с вторым входом вычислителя 3 и четвертым входом вычислителя 5. Первый выход вычислителя 3 связан с вторым входом вычислителя 5, второй выход вычислителя 3 связан с третьим входом вычислителя 5, выход задатчика 4 связан с первым входом вычислителя 5 и первым входом вычислителя 7. Первый выход вычислителя 5 связан с вторым входом вычислителя 7, второй выход вычислителя 5 связан с вторым входом вычислителя 9. Выход датчика 6 связан с третьим входом вычислителя 7, выход датчика 8 связан с четвертым входом вычислителя 7. Выход вычислителя 7 связан с первым входом вычислителя 9. Выход вычислителя 9 связан с входом авторулевого или с судоводителем, использующего траекторию перехода на параллельный курс в качестве исполнительной траектории.
Траектория перехода на параллельный курс обязательно должна содержать участок схода с текущей траектории и участок выхода на параллельную траекторию. На фиг.2 показан общий случай траектории перевода судна на параллельный курс.
Введем следующие обозначения.
 - вектор скорости судна в начале траектории перехода на параллельный курс (см. фиг.2 и 3),
- вектор скорости судна в начале траектории перехода на параллельный курс (см. фиг.2 и 3),
U|v0| - абсолютная величина путевой скорости судна,
δmax - предельная величина перекладки руля при абсолютной величине продольной скорости судна U,
 =F(δ,ω) - дифференциальное уравнение модели продольного движения судна,
=F(δ,ω) - дифференциальное уравнение модели продольного движения судна,
где ω - угловая скорость поворота корпуса судна в горизонтальной плоскости,
δ - угол перекладки руля.
 - декартовы координаты начала траектории перехода на параллельный курс (фиг.2 и 3),
- декартовы координаты начала траектории перехода на параллельный курс (фиг.2 и 3),
Δϕ - величина приращения путевого угла при движении по криволинейному отрезку (фиг.2 и 3),
Δϕmin, Δϕmax - предельные величины изменения путевого угла при построении траекторий перевода судна на параллельный курс (фиг.2),
Н - расстояние смещения параллельного курса от текущего курса. Н>0 - смещение вправо по отношению к направлению исходной траектории. H<0 - смещение влево по отношению к направлению исходной траектории (фиг.2, 3).
H1 - высота криволинейного отрезка (фиг.2 и 3),
H2 - высота прямого отрезка между двумя ДОЭПО (фиг.2),
L - длина прямого отрезка между двумя ДОЭПО (фиг.2).
Будут рассматриваться два вида траекторий перевода судна на параллельный курс: траектория, состоящая из трех отрезков: криволинейного r0Ar1, прямого отрезка r1r2 и криволинейного r2Br3 (фиг.2), и траектория, состоящая из двух криволинейных отрезков без прямой вставки (фиг.3),
где r0, r1 - координаты начальной и конечной точек отрезка r0Ar1, соответственно,
α0, α1 - направления касательных в начальной и конечной точках отрезка r0Ar1, соответственно.
В то же время параметры α0, α1 являются путевыми углами судна в начальной и конечной точках отрезка r0Ar1, соответственно, и курсами судна на прямых участках траектории, примыкающих к траектории r0Ar1.
Полиномиальную кривую пятой степени в базисе Бернштейна [2] P5(u), у которых кривизна в начальной и конечной точках равна нулю, назовем элементарным полиномиальным отрезком (ЭПО).
 где А0, А1, А2, A3, А4, A5 - двумерные коэффициенты,
где А0, А1, А2, A3, А4, A5 - двумерные коэффициенты,
 - базисные полиномы Бернштейна пятой степени, которые обладают повышенной вычислительной устойчивостью,
- базисные полиномы Бернштейна пятой степени, которые обладают повышенной вычислительной устойчивостью,
u - скалярный параметр, принимающий значения в диапазоне от 0 до 1.
В качестве криволинейных отрезков будем применять элементарные полиноминальные отрезки.
Для траектории, состоящей из ЭПО и прямых отрезков, равенство нулю кривизны в граничных точках ЭПО обеспечивает физически реализуемый (безударный) переход судна с одного отрезка траектории на другой.
Будем считать, что абсолютная величина путевой скорости U постоянна при движении судна вдоль траектории.
Задачу построения ЭПО будем рассматривать в декартовой системе координат, у которой ось X направлена на восток, а ось Y - на север. ЭПО однозначно определяется набором параметров граничных точек [2].
{r0, α0, d0, с0, r1, α1, d1,с1},
где r0, r1 - координаты начальной и конечной точек ЭПО, соответственно,
α0, α1 - направления касательных в начальной и конечной точках ЭПО, соответственно,
d0, d1 - длины касательных в начальной и конечной точках ЭПО, соответственно,
c0, c1 - кривизна в начальной и конечной точках ЭПО, соответственно,
Величина α0 измеряется навигационной системой судна. Значения следующих параметров выводятся из условий задачи
 (1.2.2)
(1.2.2)
где α0,α1 - направления касательных в начальной и конечной точках ЭПО, соответственно. c0, c1 - кривизна в начальной и конечной точках ЭПО, соответственно.
Δϕ - приращение путевого угла,
 - вектор скорости судна в начале траектории перехода на новый курс.
- вектор скорости судна в начале траектории перехода на новый курс.
Из [2] следует, что умножение каждого коэффициента А0, А1, А2, A3, А4, A5 на число k≠0 приводит к умножению на k параметров r0, r1, d0, d1 и делению на k кривизны во всех точках полиномиальной кривой.
Задача построения ЭПО состоит в том, чтобы найти значения d0, r1, d1, которые задают такую траекторию, что при управлении движением судна по этой траектории абсолютная величина отклонения руля не превышает δmax.
Если заданы абсолютная величина путевой скорости U и ограничение на угол перекладки руля δmax, то минимальный радиус кривизны Rm допустимой траектории должен быть не меньше некоторой величины, определяемой дифференциальным уравнением модели продольного движения судна. Допустимые траектории перехода на новый курс можно искать среди ЭПО, которые строятся с помощью решения следующей экстремальной задачи. Найти такие d0 и d1, которые обеспечивают минимум максимальной кривизны траектории перехода на новый курс α1 при заданных r0, r1, α0, α1, с0=0 и с1=0 [2]. Элементарные полиномиальные отрезки, полученные в результате решения этой экстремальной задачи, назовем оптимальными ЭПО (ОЭПО). Чтобы условия экстремальной задача были полностью определены, необходимо задать расположение точки r1. Примем условие, что ОЭПО должна иметь осевую симметрию. Для обеспечения осевой симметрии ОЭПО [2] точку r1 будем располагать на луче, выходящем из точки r0 под углом  (фиг.4). Вследствие осевой симметрии ОЭПО длины касательных в начальной и конечной точках будут равны, т.е. dQ=d1.
(фиг.4). Вследствие осевой симметрии ОЭПО длины касательных в начальной и конечной точках будут равны, т.е. dQ=d1.
На основе результатов решения серии указанных экстремальных задач для Δϕ, лежащих в диапазоне от Δϕmin=2° до 180°, и использования свойства подобия ЭПО были построены сервисные функции rsc(Δϕ), ƒCl(Δϕ), d1(Δϕ), ƒCl_inv_(Δϕ) hc(λc) и hb(λb).
Сервисные функции определены для ОЭПО с Rm=1. Сервисные функции описаны ниже.
ОЭПО, который обеспечивает изменение путевого угла на угол (Δϕ), и при управлении движением судна по этой траектории абсолютная величина сигнала управления не будет превышать δmax, будем называть допустимым ОЭПО (ДОЭПО).
С элементарным полиномиальным отрезком можно связать понятие задающей окружности. Задающая окружность - это окружность, которая проходит через граничные точки r0 и r1 элементарного полиномиального отрезка r0Ar1 и является касательной к элементарному полиномиальному отрезку в этих точках (фиг.5).
Радиус задающей окружности Rsc вычисляется по формуле

где Rm - минимальный радиус кривизны ОЭПО, который обеспечивает изменение курса на угол Δϕ,
Δϕ - приращение путевого угла,
rsc(Δϕ) - сервисная функция, график которой приведен на фиг.6. На фиг.6 показан график сервисной функции rsc(Δϕ).
Согласно фиг.7 координаты точки r1 могут быть вычислены с помощью следующего векторного выражения

где r0,,r1 - координаты начальной и конечной точек траектории перехода на новый курс, соответственно,
Rsc - радиус задающей окружности,
Δϕ - приращение путевого угла,
R(Δϕ/2) - матрица поворота двумерного вектора на угол,
v0 - вектор скорости судна в начале траектории перехода на новый курс.
На основании свойства подобия ЭПО длина d касательных в граничных точках ОЭПО вычисляются по следующей формуле

где Rm - минимальный радиус кривизны ОЭПО, который обеспечивает изменение путевого угла на Δϕ,
Δϕ - приращение путевого угла,
d1(Δϕ) - сервисная функция для вычисления длины касательных в граничных точках ОЭПО. График сервисной функции d1(Δϕ) показан на фиг.8.
ОЭПО однозначно определяется набором параметров граничных точек {r0,α0,d,0,r1,α1,d,0},
где r0,,r1 - координаты начальной и конечной точек ЭПО, соответственно,
α0,,α1 - направления касательных в начальной и конечной точках ЭПО, соответственно,
d - длины касательных в начальной и конечной точках ЭПО, соответственно.
Для использования ОЭПО в алгоритмах управления необходимо вычислять координаты точек ОЭПО, координаты касательных векторов и кривизну для любого u∈ [0,1]. Поэтому набор параметров в граничных точках необходимо преобразовать в двумерные коэффициенты полинома Р5(u) {А0,А1,А2,А3,А4,А5}.
Преобразование выполняется по следующим формулам.
A0=r0, A1= ·d·(sin(α0), cos(α0))T
·d·(sin(α0), cos(α0))T
А2=2-А1+А0
А3=r1, А4= ·(sin(α1), cos(α1))T
·(sin(α1), cos(α1))T
А5=2*А4+А3 (1.4.1)
где A1 - двумерные коэффициенты полинома Р5(u) (i=0…5),
r0, r1 - координаты начальной и конечной точек траектории перехода на новый курс, соответственно,
α0, α1. путевые углы в начальной и конечной точках траектории перехода на новый курс, соответственно,
d - длина касательных в начальной и конечной точках траектории перехода на новый курс.
При построении ДОЭПО необходимо учитывать, что в процессе управления движением судна по криволинейной траектории максимальные по абсолютной величине сигналы управления могут быть или во внутренних, или в граничных точках этой траектории.
Во внутренних точках ОЭПО, в которых угловая скорость судна максимальна по абсолютной величине,
=0. Из уравнения 0=F(bmax, ωmax) можно найти ωmax.
С помощью следующей формулы можно найти минимальный радиус кривизны Rm_c ОЭПО, обусловленный δmax во внутренних точках ОЭПО.
где U - абсолютная величина путевой скорости судна,
ωmax - максимальная по абсолютной величине угловая скорость судна, обусловленная δmax.
В граничных точках ОЭПО, т.к. с0=с1=0, то угловые скорости тоже равны нулю ω0=ω1=0. Из соотношения  max=F(δmax,0) можно найти
max. Минимальный радиус кривизны ОЭПО Rm_b, обусловленный максимальным углом перекладки руля в граничных точках, вычисляется по следующей формуле
max=F(δmax,0) можно найти
max. Минимальный радиус кривизны ОЭПО Rm_b, обусловленный максимальным углом перекладки руля в граничных точках, вычисляется по следующей формуле

где Rm_b - минимальный радиус кривизны ОЭПО, который определяется максимальным углом перекладки руля в граничных точках ОЭПО,
Δϕ - приращение путевого угла,
ƒcl(Δϕ) - сервисная функция с областью значений [18,48, 0,985] и областью определения [2°, 180°], график которой приведен на фиг.9,
U - абсолютная величина путевой скорости судна,
max - абсолютная величина производной угловой скорости судна в горизонтальной плоскости в граничных точках, обусловленная δmax.
Допустимой траекторией, обеспечивающей изменение путевого угла на Δϕ, будет ОЭПО с минимальным радиусом кривизны Rm, равным

где Rm_с - минимальный радиус кривизны ОЭПО, который определяется максимальным углом перекладки руля во внутренних точках ОЭПО,
Rm_b - минимальный радиус кривизны ОЭПО, который определяется
максимальным углом перекладки руля в граничных точках ОЭПО.
Пусть известна высота Н1 криволинейного отрезка (см. фиг.2 и 3). Из элементарной геометрии следует, что

где Н - расстояние смещения параллельного курса от текущего курса,
sign(x) - функция, равная: 1 при х>0, -1 при х<0, 0 при х=0,
H1 - высота криволинейного отрезка (см. фиг.2 и 3),
Rsc - минимальный радиус кривизны ОЭПО, который обеспечивает изменение курса на угол Δϕ,
Δϕ - приращение путевого угла.
Рассмотрим уравнение, полученное подстановкой (1.5.1) в (1.6.1)

где H1 - высота криволинейного отрезка (фиг.2 и 3),
Н - расстояние смещения параллельного курса от текущего курса,
U - абсолютная величина путевой скорости судна,
ωmax - максимальная по абсолютной величине угловая скорость судна, обусловленная δmax,
rsc(Δϕ) - сервисная функция, график которой приведен на фиг.6,
Δϕ - приращение путевого угла. Рассмотрим уравнение, полученное подстановкой (1.5.2) в (1.6.1)

где Н1 - высота криволинейного отрезка (см. фиг.2 и 3),
Н - расстояние смещения параллельного курса от текущего курса,
U - абсолютная величина путевой скорости судна,
 max - абсолютная величина производной угловой скорости судна в горизонтальной плоскости в граничных точках, обусловленная δmax,
max - абсолютная величина производной угловой скорости судна в горизонтальной плоскости в граничных точках, обусловленная δmax,
ƒcl(Δϕ) - сервисная функция, график которой приведен на фиг.9,
rsc(Δϕ) - сервисная функция, график которой приведен на фиг.6,
Δϕ - приращение путевого угла.
Выражения (1.6.2) и (1.6.3) рассмотрим как уравнения для Δϕ. Согласно разделу 5, необходимо выбрать для нахождения Δϕ то уравнение, которому соответствует наибольший из двух радиусов Rm_c и Rm_b. Если Δϕ найден, то, используя выражения (1.5.1), (1.5.2), (1.3.1), (1.3.2), можно будет рассчитать наборы параметров граничных точек двух ДОЭПО, входящих в траекторию перехода на параллельный курс.
Выделим из (1.6.2) и (1.6.3) функции hc_inv(Δϕ) и hb_inv(Δϕ), соответственно
hc_inv(Δϕ)=rsc(Δϕ)(1-cos(Δϕ))
hb_inv(Δϕ)=ƒcl(Δϕ)rsc(Δϕ)(1-cos(Δϕ)),
где rsc(Δϕ) - сервисная функция, график которой приведен на фиг.6,
ƒcl(Δϕ) - сервисная функция, график которой приведен на фиг.9,
Δϕ - приращение путевого угла.
На основе функции hc_inv(Δϕ) построена обратная к ней сервисная функция hc(λc) с областью значений [2°, 150°] и областью определения [0,00072, 2,223] (фиг.10). На основе функции hb_inv(Δϕ) построена обратная к ней сервисная функция hb(λb) с областью значений [2°, 130°] и областью определения [0,01325, 3,549] (фиг.11).
Из (1.6.2) следует, что при  и λc∈[0,00072, 2,223] угол изменения курса Δϕc, обусловленный δmax
во внутренних точках ОЭПО, с учетом правила знаков для H и Δϕ равен
и λc∈[0,00072, 2,223] угол изменения курса Δϕc, обусловленный δmax
во внутренних точках ОЭПО, с учетом правила знаков для H и Δϕ равен

где Н1 - высота криволинейного отрезка (фиг.2 и 3),
Н - расстояние смещения параллельного курса от текущего курса,
hc(λc) - сервисная функция, график которой приведен на фиг.10.
Аналогично, из (1.6.3) следует, что при  и λb∈[0,01325, 3,549] угол изменения курса Δϕb, обусловленный максимальным углом перекладки руля в граничных точках, равен
и λb∈[0,01325, 3,549] угол изменения курса Δϕb, обусловленный максимальным углом перекладки руля в граничных точках, равен

где Н1 - высота криволинейного отрезка (фиг.2 и 3),
Н - расстояние смещения параллельного курса от текущего курса,
hc(λc) - сервисная функция, график которой приведен на фиг.11.
Рассмотрим диапазон возможных значений абсолютной величины приращения путевого угла Δϕmin≤|Δϕ|≤Δϕmax. Для обеспечения совместимости областей значений функций hc(λc) и hb(λb) должны выполняться следующие условия: Δϕmin≥2° и Δϕmax≥130°.
Когда заданы Δϕmin, Δϕmax, то можно вычислить соответствующие им высоты H1_min и H1_max ДОЭПО. При вычислении указанных высот необходимо учитывать следующие разности минимальных радиусов кривизны

где для вычисления Rm_с используется правая часть выражения (1.5.1), для вычисления Rm_b используется правая часть выражения (1.5.2).
Если выполнено условие a) ΔRm_min≥0, то

иначе

где H1_min - абсолютная величина высоты ДОЭПО, когда приращение путевого угла равно Δϕmin,
Н - расстояние смещения параллельного курса от текущего курса,
U - абсолютная величина путевой скорости судна,
ωmax - максимальная по абсолютной величине угловая скорость судна, обусловленная δmax,
rsc(Δϕ) - сервисная функция, график которой приведен на фиг.6,
Δϕ - приращение путевого угла,
 max - абсолютная величина производной угловой скорости судна в горизонтальной плоскости в граничных точках, обусловленная δmax,
max - абсолютная величина производной угловой скорости судна в горизонтальной плоскости в граничных точках, обусловленная δmax,
ƒcl(Δϕ) - сервисная функция, график которой приведен на фиг.9. Если выполнено условие б) ΔRm_max≥0, то

иначе
где H1_max - абсолютная величина высоты ДОЭПО, когда приращение путевого угла равно Δϕmax,
Н - расстояние смещения параллельного курса от текущего курса,
U - абсолютная величина путевой скорости судна,
ωmax - максимальна по абсолютной величине угловая скорость судна, обусловленная δmax,
rsc(Δϕ) - сервисная функция, график которой приведен на фиг.6,
Δϕ - приращение путевого угла,
max - абсолютная величина производной угловой скорости судна в горизонтальной плоскости в граничных точках, обусловленная δmax,
fcl(Δϕ) - сервисная функция, график которой приведен на фиг.9.
Высоты H1_min и H1_max задают диапазон возможных абсолютных значений высот ДОЭПО.
Если выполнено условие в) ΔRm_min<0 и ΔRm_max>0, то внутри диапазона возможных значений приращения путевого угла существует угол Δϕкр, при котором Rm_c=Rm_b. Используя (1.5.1) и (1.5.2), получаем уравнение (6.11) для Δϕкр

где ωmax - максимальная по абсолютной величине угловая скорость судна, обусловленная δmax.
max - абсолютная величина производной угловой скорости судна в горизонтальной плоскости в граничных точках, обусловленная δmax,
ƒcl(Δϕ) - сервисная функция, график которой приведен на фиг.9.
Построена сервисная функция fcl_inv(ξ) обратная к функции fcl(Δϕ). ƒcl_inv(Δξ) - сервисная функция имеет область значений [180°, 2°] и область определения [0,985, 18,48].
Функция ƒcl_inv(Δξ) позволяет находить Δϕкр при 

где ƒcl_inv(Δξ) - сервисная функция, график которой показан на фиг.12.
Используя Δϕкр, с помощью выражения (1.6.2) можно найти Нкр

где Нкр - абсолютная величина высоты ДОЭПО, при которой Rm_c=Rm_b, если выполнено условие в),
H - расстояние смещения параллельного курса от текущего курса,
U - абсолютная величина путевой скорости судна,
ωmax - максимальная по абсолютной величине угловая скорость судна, обусловленная δmax,
rsc(Δϕ) - сервисная функция, график которой приведен на фиг.6,
Δϕ - приращение путевого угла.
Критическими параметрами, определяющими способ вычисления Δϕ и Rm, являются H1_min, Hкр и H1_max.
Если выполнено условие ΔRm_minΔRm_max>0, то Нкр не определено.
Если H1_min<|H1|<H1_max, то, если |H1|<Hкр, то для вычисления Δϕ и Rm надо использовать (1.6.5) и (1.5.2), соответственно, иначе для вычисления Δϕ и Rm использовать (1.6.4) и (1.5.1), соответственно.
Если выполнено условие a) ΔRm_min≥0 и ΔRm_max≥0, то для вычисления Δϕ и Rm надо использовать (1.6.4) и (1.5.1), соответственно.
Если выполнено условие б) ΔRm_min≤0 и ΔRm_max≤0, то для вычисления Δϕ и Rm надо использовать (1.6.5) и (1.5.2), соответственно.
Если |H|<2H1_min, то
H=2sign(H)Hl_min
H1=sign(H)Hl_min
L=0
Если |H|>2Hl_max, то
H2=H-2H1,
L=H2/cos(Δϕ-π/2)
Если 2H1_min<|H|<2Hl_max, то
H1=sign(H)H/2,
L=0
где H - расстояние смещения параллельного курса от текущего курса,
H1_min - абсолютная величина высоты ДОЭПО, когда приращение путевого угла равно Δϕmin,
Н1 - высота криволинейного отрезка,
Hl_max - абсолютная величина высоты ДОЭПО, когда приращение путевого угла равно Δϕmax.
L - длина прямого отрезка между двумя ДОЭПО,
Δϕ - приращение путевого угла.
Устройство для формирования траектории перевода судна на параллельный курс с соблюдением ограничений на диапазон изменения сигнала управления работает следующим образом.
На первый и второй входы вычислителя 3 поступают: абсолютная величина максимально допустимого сигнала управления δmax
и абсолютная величина скорости движения судна U, соответственно. Из уравнения 0=F(δmax, ωmax) находится ωmax. С помощью выражения  =F(δmax, 0) вычисляется
=F(δmax, 0) вычисляется  . Вычислитель 3 извлекает из памяти констант Δϕmin, Δϕmax и рассчитывает ΔRm_min и ΔRm_max с помощью выражений (1.6.6). Вычислитель 3 рассчитывает H1_min по формуле (1.6.7), если выполнено условие а), иначе по формуле (1.6.8). Вычислитель 3 рассчитывает Н1_max по формуле (1.6.9), если выполнено условие б), иначе по формуле (1.6.10). Если выполнено условие в), то вычислитель 3 по формуле (1.6.12) рассчитывает Δϕкр и затем по формуле (1.6.13) рассчитывает Нкр. Если выполнены условия а) и б), то Нкр присваивается код - 1. Если условия а) и б) не выполнены, то Нкр присваивается код - 2.
. Вычислитель 3 извлекает из памяти констант Δϕmin, Δϕmax и рассчитывает ΔRm_min и ΔRm_max с помощью выражений (1.6.6). Вычислитель 3 рассчитывает H1_min по формуле (1.6.7), если выполнено условие а), иначе по формуле (1.6.8). Вычислитель 3 рассчитывает Н1_max по формуле (1.6.9), если выполнено условие б), иначе по формуле (1.6.10). Если выполнено условие в), то вычислитель 3 по формуле (1.6.12) рассчитывает Δϕкр и затем по формуле (1.6.13) рассчитывает Нкр. Если выполнены условия а) и б), то Нкр присваивается код - 1. Если условия а) и б) не выполнены, то Нкр присваивается код - 2.
На первый выход вычислителя 3 подается набор критических параметров траектории
{H1_min, Hкр, Н1_max},
где H1_min - абсолютная величина высоты (что за высота) ДОЭПО, когда приращение путевого угла равно Δϕmin,
Нкр - абсолютная величина высоты ДОЭПО, при которой Rm_c=Rm_b, если выполнено условие в); -1, если выполнены условия а) и б); -2, если условие а) не выполнено и условие б) не выполнено,
H1_max - абсолютная величина высоты ДОЭПО, когда приращение путевого угла равно Δϕmax.
На второй выход вычислителя 3 подаются ωmax
и
,
где ωmax - абсолютная величина производной угловой скорости судна в горизонтальной плоскости в граничных точках, обусловленная, δmax
- абсолютная величина производной угловой скорости судна в горизонтальной плоскости в граничных точках, обусловленная δmax,
На первый вход вычислителя 5 поступает расстояние смещения параллельного курса от текущего курса Н, на второй вход поступает набор критических параметров траектории (H1_min, Нкр, H1_max), на третий вход поступают ωmax
и
, на четвертый вход поступает абсолютная величина скорости движения судна U. По алгоритму, указанному выше, выполняется расчет H1 и L. Δϕ и Rm. На первый выход подаются Δϕ и Rm, на второй выход (какого блока) подается длина L прямого отрезка между двумя ДОЭПО.
На первый вход вычислителя 7 поступает расстояние смещения параллельного курса от текущего курса Н, на второй вход поступают Δϕ и Rm, на третий вход поступают координаты центра масс судна r0, на четвертый вход поступает путевой угол α0. По формуле (1.2.3) выполняется расчет радиуса задающей окружности Rsc. По выражениям (1.2.2) выполняется расчет α1 и присваиваются нулевые значения с0 и с1. По формуле (1.3.2) выполняется расчет длины d касательных в граничных точках ДОЭПО. На выход подается набор параметров граничных точек первого ДОЭПО

где r0, r1 - координаты начальной и конечной точек первого ДОЭПО, соответственно,
α0, α1- направления касательных в начальной и конечной точках первого ДОЭПО, соответственно,
d - длины касательных в начальной и конечной точках первого ДОЭПО,
Δϕ - приращение путевого угла.
На первый вход вычислителя 9 поступает набор параметров граничных точек первого ДОЭПО {r0, α0, d, 0, r1, α1, d, 0} и Δϕ. На второй вход поступает длина L прямого отрезка между двумя ДОЭПО.
С помощью выражений (1.4.1) набор параметров первого ДОЭПО (2.1) преобразуется в набор М0 двумерных коэффициентов полинома, задающего первый ДОЭПО,
M0={A0, А1, А2, А3, А4, А5}
Если L=0, то выполняются действия, описанные в разделе 2.1, иначе выполняются действия, описанные в разделе 2.2.
Траектория перевода судна на параллельный курс состоит из двух ДОЭПО (фиг.3). С помощью выражений (2.2) выполняется расчет набора граничных параметров второго ДОЭПО

где r0 - координаты начальной точки первого ДОЭПО,
r1 - координаты конечной точки первого ДОЭПО, совпадающей с начальной точкой второго ДОЭПО,
r2 - координаты конечной точки второго ДОЭПО,
α1 - направление касательных в конечной точке первого ДОЭПО, совпадающее с направлением касательной в начальной точке второго ДОЭПО,
α2 - направление касательных в конечной точке первого ДОЭПО, совпадающее с направлением касательной в начальной точке второго ДОЭПО,
Δϕ - приращение путевого угла.
Вычислитель 9 формирует набор (2.3) параметров второго ДОЭПО

С помощью выражений (1.4.1) набор параметров второго ДОЭПО (2.3) преобразуется в набор Mt двумерных коэффициентов полинома, задающего второй ДОЭПО,
M1={A0, А1, А2, А3, А4, А5}.
Наборы двумерных коэффициентов M0 и М1 подаются на выход вычислителя 9. Траектория перевода судна на параллельный курс состоит из трех ДОЭПО (фиг.2). По формуле (2.4) выполняется расчет координат конечной точки r2 прямого отрезка

где r1 - координаты конечной точки первого ДОЭПО, совпадающей с начальной точкой второго ДОЭПО,
L - длина прямого отрезка между двумя ДОЭПО,
Δϕ - приращение путевого угла.
С помощью выражений (2.5) выполняется расчет набора граничных параметров второго ДОЭПО

где r0 - координаты начальной точки первого ДОЭПО,
r1 - координаты конечной точки первого ДОЭПО, совпадающей с начальной точкой второго ДОЭПО,
r2 - координаты конечной точки прямого отрезка, совпадающей с начальной точкой второго ДОЭПО,
r3 - координаты конечной точки второго ДОЭПО,
α1 - направление касательных в конечной точке первого ДОЭПО, совпадающее с направлением касательной в начальной точке второго ДОЭПО,
α2 - направление касательных в конечной точке первого ДОЭПО, совпадающее с направлением касательной в начальной точке второго ДОЭПО,
Δϕ - приращение путевого угла.
Вычислитель 9 формирует набор М1 координат граничных точек прямого отрезка
M1={r1,r2}
Вычислитель 9 формирует набор (2.6) параметров второго ДОЭПО

С помощью выражений (1.4.1) набор параметров второго ДОЭПО (2.7) преобразуется в набор М, двумерных коэффициентов полинома, задающего второй ДОЭПО,

Наборы М0, М1 и М2 подаются на выход вычислителя 9.
Результатом работы вычислителя 9 и всего устройства являются наборы параметров математического представления траектории перевода судна на параллельный курс. Указанное математическое представление траектории перевода судна на параллельный курс поступает на вход авторулевого и/или индикатора отклонения от заданной траектории для использования его в качестве исполнительной траектории.
В работе авторулевого, как автоматической следящей системы управления движением судна, может быть использован любой алгоритм вычисления сигнала управления, предназначенный для управления движением судна по заданной криволинейной траектории, например, описанный в [3].
Вычислительный эксперимент показал, что использование исполнительной траектории перехода на параллельный курс, поступающей на выход вычислителя 9, в качестве задающего сигнала авторулевого, обеспечивает точное движение по этой исполнительной траектории, при этом сигнал управления не выходит из заданного диапазона.
За счет использования в качестве исполнительной такой траектории, которая позволяет выполнять управление движением объекта по этой траектории при углах отклонения рулевого органа, лежащих в заданном диапазоне, повышается безопасность движения судна при переводе его на параллельный курс за счет использования в качестве исполнительной такой траектории, которая позволяет выполнять управление движением объекта по этой траектории при углах отклонения рулевого органа, лежащих в заданном диапазоне. Особую важность предлагаемое устройство формирования траектории перевода судна на параллельный курс имеет для скоростных судов при планировании и выполнении маневра уклонения в случае появления опасного объекта. Дополнительно можно отметить, что (в сравнении с патентом RU 2406645 C1, G01C 21/14) во время работы предлагаемого устройства нет необходимости решать задачу поиска экстремума, т.к. она решена при разработке настоящего патента, что понижает требования к мощности бортового вычислительного устройства.
Особую важность устройство формирования траектории перевода судна на параллельный курс имеет для скоростных судов при планировании и выполнении маневра уклонения в случае появления опасного объекта. Дополнительно можно отметить, что (в сравнении с патентом RU 2406645 C1, G01C 21/14) во время работы предлагаемого устройства нет необходимости решать задачу поиска экстремума, т.к. она решена при разработке настоящего патента, что понижает требования к мощности бортового вычислительного устройства.
Список литературы
1. Fossen Thor I. Marine control systems. Marine Cybernetics. - Trondheim. Norway. - 2002.
2. Довгоброд Г.М., Клячко Л.М., Рогожников A.B. Использование параметрической аппроксимации при планировании траекторий движения аппаратов // Изв. Вузов. Приборостроение. 2009. Т.52. №9. С.11-17.
3. Довгоброд Г.М. Разработка адаптивного алгоритма управления движением судна по криволинейной траектории с помощью метода попятного синтеза управления // Гироскопия и навигация. 2011. №4. С.22-31.
Устройство для формирования траектории перевода судна на параллельный курс, содержащее задатчик абсолютной величины максимально допустимого сигнала управления, датчик продольной скорости, вычислитель критических параметров траектории перевода судна на параллельный курс с двумя входами и двумя выходами, задатчик расстояния смещения параллельного курса от текущего курса, вычислитель изменения путевого угла Δϕ, минимального радиуса R допустимых оптимальных полиномиальных отрезков (ДОЭПО) и длины L прямого отрезка между двумя ДОЭПО с четырьмя входами и двумя выходами, датчик координат центра масс судна, вычислитель набора параметров граничных точек первого ДОЭПО с четырьмя входами и одним выходом, датчик путевого угла, вычислитель выходных параметров элементарных отрезков, составляющих траекторию перевода судна на параллельный курс, с двумя входами и одним выходом, первый вход вычислителя критических параметров траектории перевода судна на параллельный курс соединен с выходом задатчика абсолютной величины максимально допустимого сигнала управления, второй вход вычислителя критических параметров траектории перевода судна на параллельный курс соединен с выходом датчика продольной скорости, первый и второй выходы вычислителя критических параметров траектории перевода судна на параллельный курс соединены со вторым и третьим входами, соответственно, вычислителя изменения путевого угла Δϕ, минимального радиуса R ДОЭПО и длины L прямого отрезка между двумя ДОЭПО, первый вход вычислителя изменения путевого угла Δϕ, минимального радиуса R ДОЭПО и длины L прямого отрезка между двумя ДОЭПО соединен с выходом задатчика расстояния смещения параллельного курса от текущего курса, четвертый вход вычислителя изменения путевого угла Δϕ, минимального радиуса R ДОЭПО и длины L прямого отрезка между двумя ДОЭПО соединен с выходом датчика продольной скорости, первый выход вычислителя изменения путевого угла Δϕ, минимального радиуса R ДОЭПО и длины L прямого отрезка между двумя ДОЭПО соединен со вторым входом вычислителя набора параметров граничных точек первого ДОЭПО, второй выход вычислителя изменения путевого угла Δϕ, минимального радиуса R ДОЭПО и длины L прямого отрезка между двумя ДОЭПО соединен со вторым входом вычислителя выходных параметров элементарных отрезков, составляющих траекторию перевода судна на параллельный курс, первый вход вычислителя набора параметров граничных точек первого ДОЭПО соединен с выходом задатчика расстояния смещения параллельного курса от текущего курса, третий вход вычислителя набора параметров граничных точек первого ДОЭПО соединен с выходом датчика координат центра масс судна, четвертый вход вычислителя набора параметров граничных точек первого ДОЭПО соединен с выходом датчика путевого угла, выход вычислителя набора параметров граничных точек первого ДОЭПО соединен с первым входом вычислителя выходных параметров элементарных отрезков, составляющих траекторию перевода судна на параллельный курс, на выходе вычислителя выходных параметров элементарных отрезков формируется траектория перевода судна на параллельный курс, состоящая из двух ДОЭПО или состоящая из трех элементарных отрезков: первого ДОЭПО, прямого отрезка и второго ДОЭПО, которая используется авторулевым как исполнительная траектория в процессе управления движением судна при переводе судна на параллельный курс.
Способ определения положения судна и характеристик его движения
Способ разрушения ледяного покрова
Активный гидролокатор
Информационно-аналитическая система мониторинга обстановки, предупреждения и ликвидации чрезвычайных ситуаций
Каскадная холодильная машина
Способ десантирования автомобилей и бронемашин в зону боевых действий
Система регулирования состава хладагента
Видеосистема для регистрации нештатных ситуаций на судоходных реках
Комплект персонального навигационного оборудования для маломерных судовых плавсредств
Способ передачи дискретных сообщений с многопараметрической адаптацией
Способ определения положения судна и характеристик его движения
Способ разрушения ледяного покрова
Активный гидролокатор
Информационно-аналитическая система мониторинга обстановки, предупреждения и ликвидации чрезвычайных ситуаций
Каскадная холодильная машина
Способ десантирования автомобилей и бронемашин в зону боевых действий
Система регулирования состава хладагента
Видеосистема для регистрации нештатных ситуаций на судоходных реках
Комплект персонального навигационного оборудования для маломерных судовых плавсредств
Способ передачи дискретных сообщений с многопараметрической адаптацией

